
EFFICIENT ORGANIZATION OF TRUCK PLATOONS BY MEANS
OF DATA MINING
Application of the Data Mining Technique for the Planning and Organization
of Electronically Coupled Trucks
Ralph Kunze, Richard Ramakers, Klaus Henning and Sabina Jeschke
Center of Learning and Knowledge Management and Institute of Information Management in Mechanical Engineering
RWTH Aachen University, Dennewartstrasse 27, Aachen, Germany
Keywords:
Truck platoons, Platoon driving, Electronic coupling, Road capacity, Data mining, Sequential pattern mining.
Abstract:
One opportunity to manage the increase of freight transportation and to optimize utilization of motorway
capacities is the concept of truck platoons. With the aid of Advanced Driver Assistance Systems, trucks are
electronically coupled keeping very short gaps (approx. 10 meters) to form truck platoons on motorways.
This contributes to a couple of advantages, such as a reduction of the inter-vehicle distance, which leads to
an improved vehicle occupancy and gained road space, an optimization of traffic flow, the reduction of fuel
consumption advantaged by slipstream driving, a relief for professional drivers and finally an increase in safety
due to the longitudinal and lateral guidance. In this paper, a brief introduction into these truck platoons is given,
which have been realized within the project KONVOI. The paper focuses on the calculations for an efficient
planning and organizing of truck platoons, which could have been realized by means of the application of data-
mining technique. Therefore, the efficiency criterion of electronically coupled truck platoons is discussed as
well as the framework of the data-mining technique and the algorithm for the calculation of efficient truck
platoons are presented. Finally, the experimental results of the application of the data-mining technique and
their relevance for an efficient operation of truck platoons is presented.
1 INTRODUCTION
1.1 Initial Situation
The integration of the new European member coun-
tries is a challenging component for national traffic
planning in the near future. Especially countries with
a central geographic position within Europe, such as
Germany, have to shoulder the majority of the fu-
ture traffic emergence. Additionally, this traffic will
predominantly encumber the road. Due to the in-
crease of global freight transportation, the maximum
road capacity in several countries worldwide is nearly
reached (Economic and Social Commission for Asia
and the Pacific, 2008). A modern national economy
needs an efficient traffic system to face such a chal-
lenge successfully. Otherwise, today’s even worse
traffic situation will be pre-assigned to collapse.
The importance of this fact was emphasized by
studies from the European Commission in 2006
(Commission of the European Communities, 2006).
Between 1995 and 2004 a growth of 35% in road
freight transport was detected. Furthermore, between
the years 2000 and 2020 an increase of 55% in road
transportation is expected (Commission of the Euro-
pean Communities, 2006). In the year 2003, the Euro-
pean Commission stated that every day 7,500 kilome-
ters of the European road system are being blocked by
traffic jams (Commision of the European Communi-
ties, 2003). Environmental pollution, safety risks and
a loss in efficiency for the economy are only some
of the effects that result from these factors. Similar
problems are known and discussed worldwide.
One possibility to face the rising traffic volume
on the roads is the modal shift to other types of
transportation (e.g. rail, shipping). Further poten-
tial has the optimization of the road-side traffic flow
by driving assistance systems. Since the 90s, Ad-
vanced Driver Assistance Systems (ADAS) for trucks
have been on offer, including pre-adjustment of speed
and distance to the front vehicle. This is exerted
automatically via computerized engine- and brake-
management in connection with an automated trans-
mission. The combination of an Adaptive Cruise
104
Kunze R., Ramakers R., Henning K. and Jeschke S. (2010).
EFFICIENT ORGANIZATION OF TRUCK PLATOONS BY MEANS OF DATA MINING - Application of the Data Mining Technique for the Planning and
Organization of Electronically Coupled Trucks.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 104-113
Copyright
c
SciTePress

Control (ACC) together with an Automatic Guidance
(AG) leads to autonomous driving. The difference be-
tween platooning and autonomous driving makes the
necessity of a leading vehicle. Following trucks can
go far distances without any manual engagement by
the driver as long as another ahead-driving vehicle ex-
ists. Nevertheless, each truck must be assigned with a
truck driver at all times due to legal rules and regula-
tions. Due to the platoons, smaller distances between
the vehicles (up to 10 meters) can be realized. These
truck platoons contribute to an optimization of traffic
flow up to 9% and a reduction of fuel consumption
due to slipstream driving (Savelsberg, 2005).
The development and evaluation of the practical
use of truck platoons is the objective of the project
KONVOI, which was funded by German’s Federal
Ministry of Economics and Technology. The Project
KONVOI is an interdisciplinary research project with
partners of RWTH Aachen University, industry and
public institutions, which ended after a duration of 49
months with test runs on German highways at the end
of May 2009 (Figure 1). With the assistance of virtual
and practical driving tests by using experimental ve-
hicles and a truck driving simulator, the consequences
and effects on the human-, the organization- and the
technology-dimension have been analyzed (Henning
et al., 2007).
Figure 1: Test Run on German Motorways (March 2009).
1.2 Problem Definition
For planning and organization of such truck platoons,
as well as evaluation and simulation purposes, it is
necessary to implement an algorithm which searches
for economic truck platoons within the planned or
current driven routes of all participating trucks. In
any case of organized platoon driving, it is essential
to search for and group possible participants. In prin-
ciple, the ”common route” is one general search crite-
rion, whereas other criteria (e.g. profit, waiting-time,
properties of the participating vehicles) can differ be-
cause of the focus.
In this paper, a data-mining technique is presented
to solve the mentioned problem of searching for pos-
sible platoons which satisfy given specific criteria (in
the case of truck platoons: economy). The scenario of
driver organized truck platoons, on which KONVOI
is based, is presented in section 2. Section 3 explains
the operational and organizational structure of platoon
systems. Before introducing the so called TPSpan-
Algorithm and related work as well as the possibil-
ity to use this algorithm as a solution for the problem
of planning and organizing truck platoons in section
5, the criterion of a efficient usage of electronically
coupled trucks as well as the calculation basis for the
efficiency of truck platoons are defined in section 4.
Finally, in section 6 the experimental results of the
application of the data-mining technique is presented.
2 THE SCENARIO ”DRIVER
ORGANIZED TRUCK
PLATOONS”
The project KONVOI is based on the scenario ”Driver
Organized Truck Platoons” (Figure 2) which was de-
veloped in the project ”Operation-Scenarios for Ad-
vanced Driving Assistance Systems in Freight Trans-
portation and Their Validation” (EFAS) (Henning and
Preuschoff, 2003). In the scenario ”Driver Orga-
nized Truck Platoons”, the platoons can operate on
today’s existing motorways without extending the in-
frastructure and the driver has the permanent con-
trol of the autonomous driving procedures (Henning
and Preuschoff, 2003). The creation of a platoon de-
pends on the initiating driver who delivers the neces-
sary data about time and place of meeting, the des-
tination, as well as the required truck telemetric data
(loading weight, engine power etc.) with the help of a
Driver Information System (DIS). The high flexibility
of truck transportation is not lost, because schedul-
ing, like in rail traffic, is dispensable. After activat-
ing the ADAS, a selection of the best matching pla-
toons is automatically shown. The ADAS informs the
driver and prepares the participation to the selected
platoon. The DIS acts as a human machine interface
of the platoon system and helps the truck driver to
plan the route and guides the driver to the meeting
point (Friedrichs et al., 2008).
The driver has to initialize and respectively con-
firm all of the platoon maneuvers in order to build
and to dissolve the platoon. As soon as the final po-
sition in the platoon is reached, an automated longi-
EFFICIENT ORGANIZATION OF TRUCK PLATOONS BY MEANS OF DATA MINING - Application of the Data
Mining Technique for the Planning and Organization of Electronically Coupled Trucks
105




Table 1: Reduction of Fuel Consumption based on Theory, Simulation and Test (Bonnet and Fritz, 2002).
THEORETICAL SIMULATION MEASUREMENT
DAIMLER DAIMLER
Fuel Consumption (1st vehicle) 2,17% (14t); 1,64% (28t) 2% (28t) 6% (14t)
Fuel Consumption (2nd vehicle) 38,06% (14t); 28,76% (28t) 19% (28t) 21% (28t)
Table 2: Reduction of Fuel Consumption due to Electroni-
cally Coupled Platoon Driving.
PLATOON FUEL
STRUCTURE REDUCTION
1st Platoon Vehicle 2%
(Leading Vehicle)
2nd Platoon Vehicle 11%
(Following Vehicle)
3rd Platoon Vehicle 13%
(Following Vehicle)
Average Fuel Reduction, 6.50%
2 Vehicles
Average Fuel Reduction, 8.67%
3 Vehicles
Average Fuel Reduction, 9.75%
4 Vehicles
Average Fuel Reduction, 10.40%
5 Vehicles
meeting point or reduce speed until they got together.
Another criterion for extra personnel costs is the pla-
toon driving itself and the associated platoon maneu-
vers (e.g. a platoon has to be dissolved at a working
area). It is also possible that a truck, which partic-
ipates in a platoon, has to drive with reduced speed
because of another, slower participant (e.g. uphill).
Due to the fact that the extra personnel costs
caused by platoon maneuvers or speed reduction be-
cause of slow participants are unascertainable without
accurate road and traffic information, therefore those
influencing criteria will be ignored. The only criteria
which take account of extra personnel costs will be
the waiting time Time
i
(l) for each participating truck
i and the wage rate k
PK
.
Costs
i
(l) = k
PK
· Time
i
(l) (6)
4.4.3 Boundaries of the Efficiency of Truck
Platoons
To get a statement on the maximum of waiting time,
equation 3 has to be transformed and complemented
by equations 4 and 6. The efficient criterion of
electronically coupled truck platoons is originated in
equation 7.
u
i
·
Length(l)
100
· ∆B
e,Size(l)
·
k
KS
k
PK
> Time
i
(l) (7)
With this efficient criterion it can be easily
proofed, if the benefit of the operation of electroni-
cally coupled truck platoons is bigger than their costs.
5 DATA MINING TECHNIQUE
5.1 Related Work
Discovering patterns in sequences is an important
knowledge discovery and data-mining research area.
There are many different interesting fields like discov-
ering rules in so called events (Mannila et al., 1997)
or finding text subsequences (Califano and Rigout-
sos, 1993) that match a regular expression. In 1995,
Agrawal and Srikant introduced the problem of min-
ing sequential patterns (Agrawal and Srikant, 1995):
”A database with customer transactions is given.
Each transaction consists of the fields; customer-id,
transaction-time and a set of items purchased in this
transaction. Quantities of items purchased in a trans-
action are not considered. The problem of mining
sequential patterns is to find all sequences that have
a certain user-specified minimal support.” This dif-
ficulty deals with the questions; ”which items are
bought in which order” or ”which item will be bought
next”. Agrawal and Srikant presented three algo-
rithms for solving the sequential pattern problem and
many other algorithms have been proposed to speed
up the mining process (e.g. (Zaki, 2001); (Pei et al.,
2004)). In general, those algorithms are based on
two different methods for mining sequential patterns:
apriori-based methods and pattern-growth methods
(Antunes and Oliveira, 2004).
The apriori-based methods are, as the name states,
based on the so called apriori condition. This con-
dition is used to generate larger candidates based on
smaller frequent sequences in the so called join-step.
Each generated candidate is then validated in the fol-
lowing so called prune-step. These two steps are
repeated until there are no more frequent sequences
found. The pattern-growth methods deduce from a
smaller frequent sequence, a longer sequence. Instead
of generating candidates, these methods directly look
for frequent sequence.
In 2003, Yan et al. introduced the problem of min-
ing closed sequential patterns which means that in-
EFFICIENT ORGANIZATION OF TRUCK PLATOONS BY MEANS OF DATA MINING - Application of the Data
Mining Technique for the Planning and Organization of Electronically Coupled Trucks
109
stead of finding all frequent sequences, only the ”most
supported” sequences are searched for (Yan et al.,
2003). They presented a new algorithm to find closed
sequential pattern, called CloSpan, which is based on
a pattern-growth method introduced in 2001 by Pei
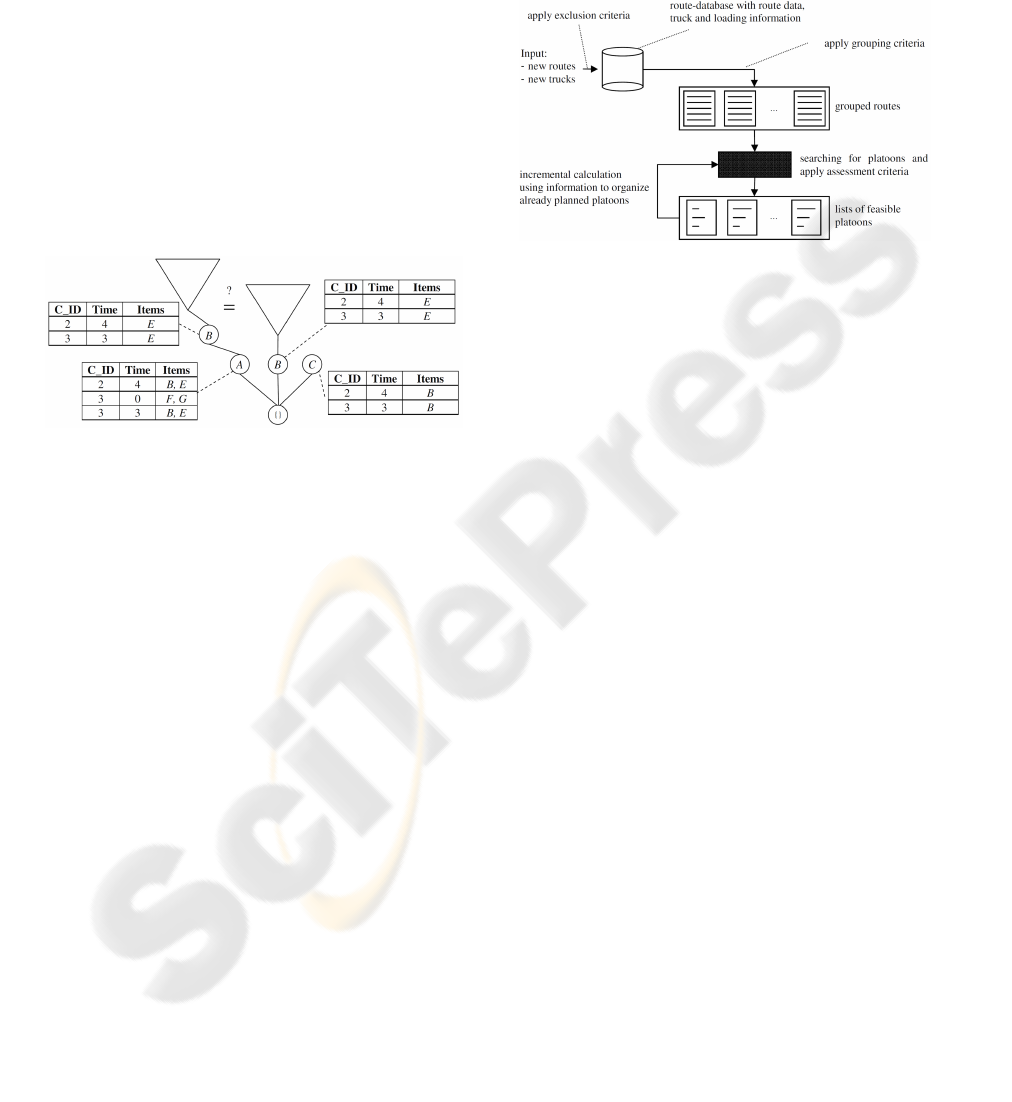
et al. Figure 6 illustrates the main idea of the ap-
proach. The items are nodes in a lexicographical se-
quence tree. Each path of the tree is a frequent se-
quence found in the database. So called projected
databases are stored for each node of the tree. If the
projected databases of two different paths are equal
to each other, the mining for more frequent sequences
can be eventually stopped. In figure 6, the mining for
further frequent sequences can be stopped at node B
in the path B because the projected database of this
node is equal to the projected database of node B in
the path A, B.
Figure 6: Illustration of the Algorithm to Find Closed Se-
quential Pattern.
The problem of mining frequent sub-routes or
economic truck platoons cannot be solved easily by
any of those algorithms. Due to the small support of
two and the given sequences of hundreds of sections,
those algorithms collapse. In the case of platoons the
support has to be two, because two is the smallest
number of participants to form a platoon. However,
these algorithms are good approaches in finding pos-
sible solutions for solving this problem.
5.2 The Truck Platoon Sequential
Pattern Algorithm
The so called TPSpan-Algorithm (Mining Truck Pla-
toon Sequential pattern) had been already presented
in detail in 2008 (Meisen et al., 2008). In this section,
we will give a brief introduction into the TPSpan-
Algorithm which searches for possible platoons in a
route database, especially optimized to find economic
truck platoons. The algorithm is split in four phases
and illustrated in Figure 7.
In the first phase, the exclusion criteria are used to
eliminate trucks or routes which do not meet those cri-
teria. Within the second phase, the grouping criteria
are applied to secure the forming of platoons within
similar conditions. In the third phase, the data-mining
technique checks each group for possible economic
truck platoons regarding the assessment criteria. Fi-
nally, in the fourth and last phase, the economic truck
platoons are grouped by truck-id. The grouped infor-
mation is then transmitted to each truck (e.g. meeting
points, profit).
Figure 7: Illustration of the Algorithm to Find Truck Pla-
toon Sequential Pattern.
The used data-mining technique in the third phase
is based on the projected pattern-growth idea pre-
sented by Pei et al. (2001) and has been enhanced for
solving the problem of mining frequent sub-routes.
It generates a lexicographic tree as shown in Figure
6. Instead of starting with each frequent section, the
tree starts with those frequent sections which have a
meeting opportunity (Meet(s
1
) = 1 ). This means that
the first section has to be e.g. a rest area. Due to
this, the width of the tree is reduced and the condi-
tion for a platoon (starting with a meeting opportu-
nity) is ensured. Another important improvement is
the so called node-compress-method which is used to
reduce the validation of the assessment criteria. In-
stead of validating the criteria for every platoon, the
common distance of a platoon will be increased as
long as the number of participants does not change. It
is ensured that the algorithm will still search for the
most economic platoons: A platoon l
1
= (s
1
, . . . , s
n
)
with Size(l
1
) = k is always more economical than a
platoon l
2
= (s
1
, . . . , s
n
) with Size(l
2
) = k, whereas
Length(l
1
) > Length(l
2
).
Figure 8 shows the framework of the data mining
technique. The algorithm is working from the root
of the tree to the leaves. In each node, the algorithm
calculates possible platoons (line 4) and determines
new children (line 6). If the projected database of
the node does not support any more platoons (line 1)
the recursion terminates. The framework also shows
the already mentioned node-compress-method (line
3) which returns a true value if the compression termi-
nated with a split. If this is the case, further children
are possible, other wise the routes of the projected
database end and no more children can be determined
(line 5).
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
110



7 CONCLUSIONS
In this paper, we have introduced a data mining tech-
nique to plan and organize platoons. Furthermore,
we have introduced and presented experimental re-
sults for an application area ”truck platoons: trains
on road”. For this case, we have examined that it is
possible to find truck platoons and that the amount
of platoons increase exponentially with the amount of
routes (participating trucks). Due to this rise, pruning
parameters are necessary. Further experiments have
shown that it is possible to find truck platoons reli-
able, efficient and flexible, even if pruning parameters
are used. We have given suggestions for these param-
eters to achieve the mentioned factors. Further work
has to be done in the field of realization. We have
presented the dilemma of different results of reduc-
ing fuel consumption. Additional effort has to be put
into the goal closing the gap between results of fuel
reduction based on theory, simulation and tests and
thus provide a further substantial contribution to the
efficiency of truck platoons.
REFERENCES
Agrawal, R. and Srikant, R. (1995). Mining Sequential Pat-
terns. In Proc. of the 11th Intl Conf. on Data Engi-
neering, Taipei (Taiwan).
Antunes, C. and Oliveira, A. L. (2004). Sequential Pattern
Mining Algorithms: Trade-offs be-tween Speed and
Memory. In Proc. of the 2nd Intl Workshop on Mining
Graphs, Trees and Sequences (ECML/PKDD).
Bonnet, C. and Fritz, H. (2002). Fuel Consumption Reduc-
tion Experienced By Two PRO-MOTE-CHAUFFEUR
Trucks. In Electronic Towbar Operation.
Califano, A. and Rigoutsos, I. (1993). Flash: A fast look-
up algorithm for string homology. In Proc. of the 1st
Intl Conf. on Intelligent Systems for Molecular Biol-
ogy, Bethesda (USA).
Commision of the European Communities, E. U. (2003).
Europe at a crossroad - The need for sustainable
transport. Brussels, Belgium.
Commission of the European Communities, E. U. (2006).
Keep Europe moving Sustainable mobility for our
continent. Brussels, Belgium.
Economic and Social Commission for Asia and the Pacific,
U. N. (2008). Statistical Yearbook for Asia and the Pa-
cific. United Nations Publication, Bankok, Thailand.
Friedrichs, A. (2008). A Driver Information System for
Truck Platoons. VDI, Duesseldorf, Germany.
Friedrichs, A., Meisen, P., and Henning, K. (19.-
22.05.2008). A Generic Software Architecture for a
Driver Information System to Organize and Operate
Truck Platoons. International Conference on Heavy
Vehicles (HHVT2008), Paris, France.
Henning, K. and Preuschoff, E. (2003). Einsatzszenar-
ien fuer Fahrerassistenzsysteme im Strassengueter-
verkehr und deren Bewertung. VDI, Duesseldorf, Ger-
many.
Henning, K., Wallentowitz, H., and Abel, D. (2007).
Das Lkw-Konvoisystem aus den Perspektiven
Informations-, Fahrzeug- und Automatisierungstech-
nik. In Mechatronik 2007 - Innovative Produkten-
twicklung.
Kunze, R., Tummel, C., and Henning, K. (19.-20.12.2009).
Determination of the Order of Electronically Coupled
Trucks on German Motorways. 2nd Conference on
Power Electronics and Intelligent Transportation Sys-
tem (PEITS 2009), Shenzhen, China.
Mannila, H., Toivonen, H., and Verkamo, A. I. (1997). Dis-
covery of frequent Episodes in Event Sequences. In
Data Mining and Knowledge Discovery.
Meisen, P. (2006). Data-Mining Technique for Truck
Platoons. RWTH Aachen University, ZLW/IMA,
Aachen, Germany.
Meisen, P., Henning, K., and Seidl, T. (2008). A Data-
Mining Technique for the Planning and Organization
of Truck Platoons. In Proceedings of the International
Conference on Heavy Vehicles.
Pei, J., Han, J., Mortazavi-Asl, B., Pinto, H., Chen, Q.,
Dayal, U., and Hsu, M.-C. (2004). PrefixSpan: Min-
ing Sequential Patterns Efficiently by PrefixProjected
Pattern Growth. In Proc. of the Intl. Conf. Data Engi-
neering (ICDE’01).
Savelsberg, E. (2005). Lastenheft fuer elektronisch gekop-
pelte Lkw-Konvois. VDI, Duesseldorf, Germany.
Schmitz, J. (2004). Energy-economic cost-benefit-analysis
of electronically coupled truck convoys. RWTH
Aachen University, ZLW/IMA, Aachen, Germany.
Yan, X., Han, J., and Afshar, R. (2003). CloSpan: Min-
ing Closed Sequential Patterns in Large Datasets. In
SDM’03.
Zaki, M. J. (2001). SPADE: An Efficient Algorithm
for Mining Frequent Sequences. In Proc. of Ma-
chine Learning Journal, Special issue on Unsuper-
vised Learning (Doug Fisher, ed.).
EFFICIENT ORGANIZATION OF TRUCK PLATOONS BY MEANS OF DATA MINING - Application of the Data
Mining Technique for the Planning and Organization of Electronically Coupled Trucks
113
