
AUTOMATIC HEADLAMP SWITCHING SYSTEM USING
ACCELEROMETERS
Kai-Chi Chan and Yiu-Sang Moon
Department of Computer Science and Engineering, The Chinese University of Hong Kong, Shatin, N.T., Hong Kong
Keywords:
Automobile, Night vision, Accelerometer, Alpha beta filter.
Abstract:
This paper presents a two-sensor method to enhance the nighttime driving safety. It consists of two accelerom-
eters and an array of auxiliary swiveling headlamps. An alpha beta filter is proposed to stabilize the readings of
the accelerometers. With the kinematics of a turning car, the cars turning path is predicted based on the steer-
ing angle measured by the accelerometers so that the relevant auxiliary swiveling headlamps will be switched
on accordingly. In this paper, we will study the performance of the alpha beta filter. Test results demonstrate
that our angular measurement method is an efficient way for proper road illumination along curved paths.
1 INTRODUCTION
Improving nighttime illumination is a crucial step for
traffic safety (Plainis et al., 2006). Although the de-
velopment of headlamp system has drawn much at-
tention recently, many issues remain unsolved. The
direction of headlamps should be able to change ac-
cording to curved paths to enhance drivers visibil-
ity. When a car starts to make a turn, the focus
of the driver should be on a curved path. In addi-
tion to the front direction, the headlamps should be
able to illuminate along the curved road before the
cars turning to ensure that there is no obstacle along
the path. BMW also utilizes this kind of technology
called adaptive headlights (Adaptive Headlights); the
direction of headlamps is determined by the internally
measured front wheel direction. In this paper, the re-
lationship between the steering wheel angle and the
moving direction of a car is studied, so that the mov-
ing direction can be measured by vehicles other than
BMW. The cars moving path is then predicted by a
simple car model. The direction of the headlamps is
determined.
The major contribution of our work is to design
a method for determining the illuminating direction
without the knowledge of path history and digital map
data. Since the method does not depend on the path
history and digital map data, the system can respond
immediately even if the drivers do not follow the path
history or the digital map data is not up-to-date. It
is also more robust when compared with traditional
approaches because the data used to determine the il-
luminating direction is collected inside the car but not
from the road scenes or Global Positioning System
(GPS) signals which are unstable and easily affected
by environment. Moreover, the system can predict
and illuminate the cars turning path to provide enough
time for the driver to react and prevent accidents. It
emphasizes on a simple but robust approach to im-
prove curved path visibility in real-time.
2 RELATED WORKS
Predictive advanced front lighting system (P-
AFS) (Ibrahim, 2005) is proposed to determine
the path that a vehicle is most likely to drive. The
path is determined by using the current position of
the vehicle, a digital map and the current vehicle
data such as speed. After analyzing those data, the
headlight beam direction is found. The headlamps
will be swiveled accordingly to keep the kink point
of the beam in the center of the road. Clearly, the
performance of the P-AFS depends on the digital map
and GPS signals. If the digital map is not up-to-date
488
Chan K. and Moon Y.
AUTOMATIC HEADLAMP SWITCHING SYSTEM USING ACCELEROMETERS.
DOI: 10.5220/0002893704880491
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISIGRAPP 2010), page
ISBN: 978-989-674-028-3
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: The circular motion of a turning car.
or the GPS signal is not stable, the performance of
the P-AFS will be affected.
(Morishita et al., 2007) investigate the drivers
preferences for headlight swivel angles on the
test track at the DENSO Abashiri Test Center in
Hokkaido. The preferences are then used to esti-
mate the optimal swivel angles by multiple-regression
model. Also, this study shows that the headlight
swivel should be predictive. This approach is based
on path history to determine the optimal swivel an-
gles. The system wont work if the driver does not
follow the path history or the path history is not avail-
able. Also, to locate the position of the car, a reliable
navigation system is needed.
3 KINEMATICS OF A TURNING
CAR
A simple car can be considered as a rigid boy. Adopt-
ing the symbols from (LaValle, 2006), the angular ve-
locity of the car is
˙
θ =
u
s
L
tanu
φ
(1)
When the car is turning around a corner, it per-
forms circular motion. In Figure 1, if the car is turn-
ing from point A to B in the period of time t, the angle
between point A and B at the center O is
a =
˙
θt (2)
Assume the angles of the two front wheels are the
same. The ratio between the angle of the front wheels
and the angle of the steering wheel is fixed in most
vehicles. If the ratio is r and the angle of the steering
wheel is u
α
, the angle between the tangent at point A
and the line joining point A and B is
b =
u
s
t
2L
tan(u
α
r) (3)
4 HEADLAMP DIRECTION
PREDICTION
As discussed in section 3, the position of the car on
a curved path can be predicted by Equation (3). The
point A and B in Figure 1 correspond to the current
and predicted positions of the car on a curved road.
The predicted position is a place where the driver
should pay most attention to. It should be as close
to the car as possible so that any unexpected incident
near the car can be discovered, reacted and avoided.
The distance between the current and predicted posi-
tions turns out to be the car stopping distance. If the
driver uses time t
R
to react and the car undergoes con-
stant deceleration (d) along the curved path to avoid
accident, the predicted direction of headlamp is
b =
u
s
t
R
+
u
s
d
2L
tan(u
α
r) (4)
Typically, the deceleration rate is 3.4m/sec
2
and
human reaction time is 2.5 seconds (Transportation
Research Institue, 1997). The general speed limits
in build-up areas are around 40-60km/h (Legislative
Council Panel On Transport, 1999). Based on the car
configuration, the possible range of headlamp direc-
tions can be calculated by Equation (4). Then, an ar-
ray of headlamps, in which each headlamp has a con-
tinuous illuminating angle, can be installed in the car.
Each headlamp can be switched on according to the
instantaneous speed u
s
and the steering wheel angle
u
α
of the car.
The instantaneous speed can be easily obtained
from the speedometer of the car. To measure the steer-
ing wheel angle of the car, two accelerometers are
used to provide an accurate and stable angle.
4.1 Steering Wheel Angle Measurement
To measure the angle of the steering wheel, a two-
axis accelerometer (A1) is attached to the center of
the steering wheel with the x-y plane parallel to the
steering wheel plane. Another two-axis accelerome-
ter (A2) is installed such that one axis is parallel to
the line of intersection of the ground plane and the
steering wheel plane.
Initially, the X-axis and Y-axis of the accelerom-
eter A1 are placed horizontally and vertically on the
steering wheel surface respectively. The horizontal
acceleration A
h
of the car is measured by A2. If the
X-axis and Y-axis acceleration rates measured by A1
are A
x
and A
y
respectively, the steering wheel angle
u
α
is
u
α
= arctan
A
x
A
y
− arcsin
A
h
q
A
2
x
+ A
2
y
(5)
4.2 Steering Wheel Angle Stabilization
To stabilize the sensor readings measured by A1 and
A2, a running average algorithm with T data points is
AUTOMATIC HEADLAMP SWITCHING SYSTEM USING ACCELEROMETERS
489

Figure 2: Sensor readings from A1 are stabilized by the
running average algorithm.
Figure 3: Steering wheel angle after smoothing using alpha
beta filter.
adopted. The running average of a sensor reading A(i)
at time i is calculated by Equation (6). Subsequently,
the rotational acceleration of the steering wheel gen-
erated by the driver which is treated as a short-term
fluctuation is removed by applying the alpha beta fil-
ter (Penoyer, 1993) on the steering wheel angle. The
alpha beta filter is employed because it is fast in com-
putation and requires only the previous state for esti-
mating the next state. As described in Figure 2, the
sensor readings from A1 are stabilized by the running
average algorithm. Figure 3 shows the steering wheel
angle which is smoothed by the alpha beta filter.
A(i) =
1
T
i
∑
k=i−T +1
A(k) (6)
5 EXPERIMENTS
In the proposed approach, the predicted direction of
headlamps is calculated by Equation (4). In Equa-
tion (4), there are typical values for all the variables
except the steering wheel angle. So, the accuracy of
the direction mainly depends on the steering wheel
angle. To test the accuracy of the measured steering
wheel angle, several experiments were conducted in a
simulated car environment.
(a) Front view (b) Side view
Figure 4: Experiment setup.
5.1 Experiment Setup
A circular disc was affixed on an inclined plane at
an inclination angle of 60
◦
. Two accelerometers
(ADXL322) were attached to the center of the disc
and the ground plane respectively. The experiment
setup was shown in Figure 4.
There were two sets of experiments. In the first
set, the system was tested under 4 different angles
(−45
◦
, −90
◦
, 45
◦
, 90
◦
). In each test, the disc was
rotated from 0
◦
to a specific angle five times. During
the test, the plane was vibrated manually to simulate
the car vibration on a rough and curved road. In the
second set, the disc was first rotated to one of the 4
different angles (−45
◦
, −90
◦
, 45
◦
, 90
◦
). The plane
was then vibrated manually to test the stability of a
fixed steering wheel angle.
The best results were achieved when the parame-
ter T in Equation (6) was set to 10. The parameters
alpha and beta in the alpha beta filter were set to 0.2
and 0.01 respectively.
5.2 Evaluation Results
The angular transitions of one trial in each test are
shown in Figure 5. Among the tests, our system
can successfully remove the noise and fluctuations
from the sensor readings. Table 1 shows the root
mean square deviations (RMSD) at specific angles
while vibrating. The results are reliable and ro-
bust to car vibration on uneven and curved roads.
There is a real time demonstration available at
http://www.cse.cuhk.edu.hk/˜kcchan/stabilization.avi
6 CONCLUSIONS AND FUTURE
WORK
We have presented a novel method to determine the
headlamp movement direction when the car is turn-
ing. Without using any path history or digital map
data, the directions of headlamps on curved paths are
predicted based on the steering wheel angles. Two ac-
celerometers are coordinated to measure the steering
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
490
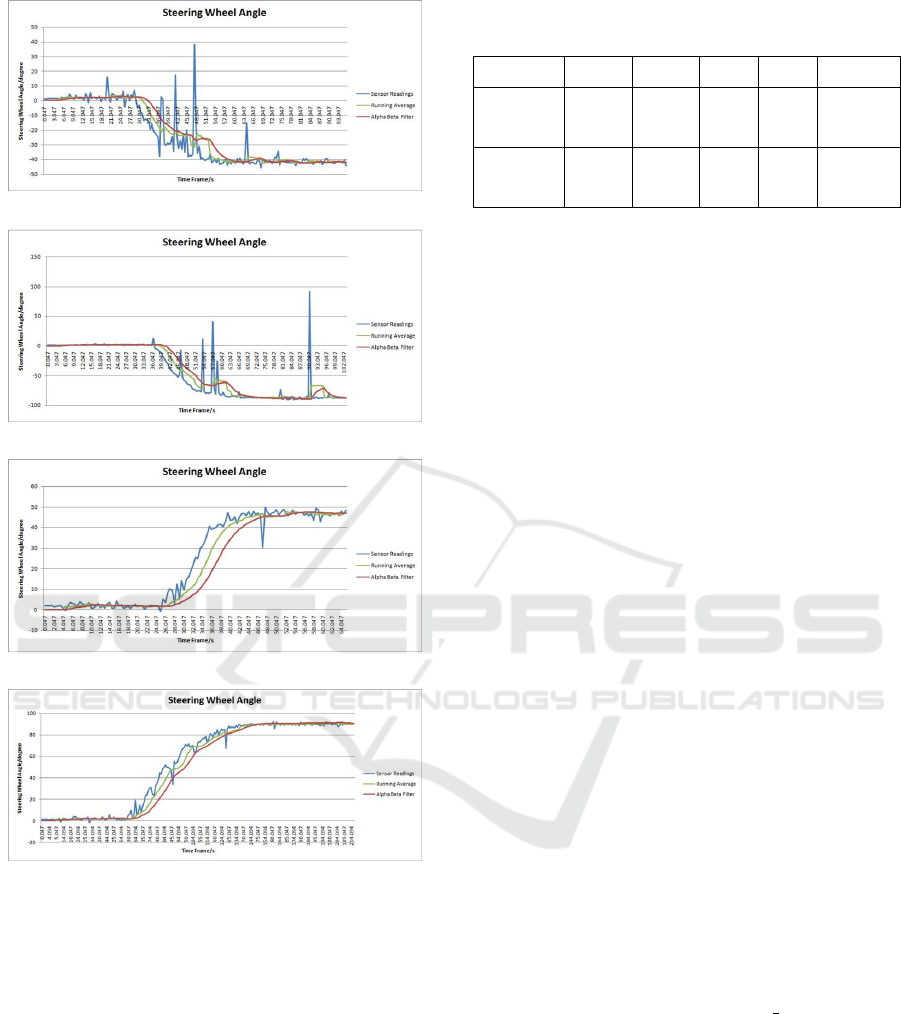
(a) The first trial rotating from 0
◦
to −45
◦
(b) The first trial rotating from 0
◦
to −90
◦
(c) The first trial rotating from 0
◦
to 45
◦
(d) The first trial rotating from 0
◦
to 90
◦
Figure 5: The angular transitions of one trial under specific
angles.
wheel angles. The sensor readings can successfully
be stabilized using the running average algorithm and
alpha beta filter. The evaluation results under a sim-
ulated environment are promising. In the future, the
system will be implemented on a vehicle to evaluate
the illumination effectiveness under corners with dif-
ferent radii. The simple turning car model can be im-
proved later for better modeling of car turning.
Table 1: The root mean square deviations (RMSD) at spe-
cific angles.
−45
◦
−90
◦
45
◦
90
◦
Overall
No. of 214 229 226 257 926
Samples
RMSD 4.66 4.50 1.51 1.07 3.30
(degree)
ACKNOWLEDGEMENTS
The work described in this paper was substantially
supported by a grant from the MPECENG(SEEM).
REFERENCES
Plainis, S., Murray, I.J., Pallikaris, I.G. (2006). Road traf-
fic casualties: understanding the night-time death toll.
Injury prevention journal of the International Society
for Child and Adolescent Injury Prevention. BMJ Pub-
lishing Group Press.
Ibrahim, F., Schmidt, C., Klein, M. (2005). Predictive Ad-
vanced Front Lighting System In Proceedings of the
ISAL 2005 Symposium. ISAL Press.
Morishita, M., Horii, Y., Hagiwara, T. (2007). Investigation
of Headlight Swivel-angle Preference at Curves on
Rural Two-lane Highways In the 86th Annual Meeting
of the Transportation Research Board.
LaValle, S.M. (2006). Planning Algorithm. Cambridge Uni-
versity Press, Cambridge, U.K.
Transportation Research Institue, Oregon State University.
(1997). STOPPING SIGHT DISTANCE AND DE-
CISION SIGHT DISTANCE Oregon Department of
Transportation, Salem, Oregon.
Legislative Council Panel On Transport. (1999). Leg-
islative Council Panel On Transport: Speed Limit
in Hong Kong. http://www.legco.gov.hk/yr99-
00/english/panels/tp/papers/a886e03.pdf
Penoyer, R. (1993). The alpha-beta filter. In The C Users
Journal. R & D Publications Press.
Adaptive Headlights. http://www.bmw.com/com/en/newvehi
cles/x3/x3/2006/allfacts/ergonomics ahc.html
AUTOMATIC HEADLAMP SWITCHING SYSTEM USING ACCELEROMETERS
491
