
INTERACTIVE CONFIGURATION OF RESTRICTED SPACES
USING VIRTUAL REALITY AND CONSTRAINT
PROGRAMMING TECHNIQUES
Marouene Kefi
1,2
, Paul Richard
1
and Vincent Barichard
2
1
Laboratoire d’Ing
´
enierie des Syst
`
emes Automatis
´
es (LISA), Universit
´
e d’Angers, 62 Avenue ND du Lac, Angers, France
2
Laboratoire D’Etudes et de Recherche en Informatique d’Angers (LERIA)
Universit
´
e d’Angers, 2 Bd Lavoisier, Angers, France
Keywords:
Virtual environment, 3D interaction, Constraint programming, Multi-modal feedback, 3D-object layout.
Abstract:
In this paper, we describe innovative approaches for the design of intelligent virtual environments (VE) for
interactive problem solving. Thus, we propose to extend VEs to support constraint-based interaction through
the use of Constraint Programming (CP) techniques. The aim of this paper is to argue for the need of CP
integration in VEs and its high relevance in the 3D-objects layout problem. The user manipulation will be
translated as incoming queries of the intelligent module (solver) which will generate a solution compatible
with the design requirements. Thus, the task of the solver is to satisfy the constraints specified by the system
in response to user interaction. In order to exhibit a high degree of visual richness and realism, the use of
human-scale multi-modal 3D interaction techniques and tools is proposed.
1 INTRODUCTION
VEs are popular terms that refer to a variety of
multi-sensorial computer-generated experiences. VEs
technology is now recognized as a powerful design
tool in industrial sectors such as manufacturing, pro-
cess engineering, construction, and aerospace indus-
tries (Zorriassatine et al., 2003). However, in many
cases, VEs are being used as pure visualization tools
for assessing the final design (Drieux et al., 2005).
One of the potential contexts in which VEs can be
employed is decision making where complex tasks
involving multiple criteria to be satisfied are to be
achieved. For example, 3D-objects layout can be a
time-consuming and tedious task. In most current
systems, the user must position each object by hand
using a computer mouse. In more advanced config-
urations, human-scale 3D interaction techniques and
multi-modal feedback (visual, auditory, kinesthetic
and tactile) may facilitate the placement of objects
in the environment. However, the user has no indi-
cation concerning the best placement of objects that
ensures satisfaction of constraints. Thus, VEs must
be extended with advanced processing modules (such
as constraint solvers, etc.) in order to assist the user
in decision making.
The concept of constraint is naturally present in
our everyday life. A constraint is defined as a logi-
cal relation between various unknown factors, called
variables, each one taking its values in domain. Thus,
a constraint restricts domains by removing values
which can’t be affected to the corresponding vari-
ables. The satisfaction of constraints requires a for-
malism which offers a structuring framework making
it possible to model the problems expressed in terms
of constraints. This formalism is called CSP (Con-
straint Satisfaction Problem). A CSP can be seen like
a problem modeled in the form of a set of constraints
on variables. The resolution of a CSP consists in as-
signing values to the variables, so that all the con-
straints are satisfied (Solnon, 2003).
Algorithms making it possible to solve a CSP are
called constraints solvers. Some solvers have been
integrated in programming languages, thus defining a
new paradigm of programming called Constraint Pro-
gramming (CP). To solve a CSP with a programming
language by constraints, it is sufficient to specify the
constraints, their resolution being automatically pro-
cessed by the CP-based solver itself integrated into
the programming language.
In this paper, we present a human-scale haptic VR
platform that allow the user to position virtual ob-
384
Kefi M., Richard P. and Barichard V. (2010).
INTERACTIVE CONFIGURATION OF RESTRICTED SPACES USING VIRTUAL REALITY AND CONSTRAINT PROGRAMMING TECHNIQUES.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 384-389
DOI: 10.5220/0002893903840389
Copyright
c
SciTePress

jects in a 3D environment. Three approaches will be
proposed to assist the user in decision making pro-
cesses in the context of 3D-objects layout problems.
These approaches make use of Constraint Program-
ming (CP) techniques. The CP-based solver proposes
solutions that satisfy all the constraints specified (off-
line or interactively) by the user.
In the next section, we present the previous work.
Section 3 describes our human-scaled haptic VR plat-
form. In section 4, we present our work concerning
3D interactive configuration of restricted spaces us-
ing our VR platform. In this case, the user is able
to manually relocate the virtual objects within a VE.
In section 5, we present more advanced approaches
based on the use of CP techniques. The paper ends
by a conclusion and provides some tracks for future
work.
2 RELATED WORK
Preliminary works using CP or Constraint Logic Pro-
gramming (CLP) in 3D environments has essentially
been dedicated to the behavior of individual objects
or autonomous agents within the environment. For
instance, Codognet has included a concurrent con-
straint programming system into VRML to specify
the behavior of artificial actors in dynamic environ-
ments (Codognet, 1999). Axling et al., (Axling et al.,
1996) have incorporated ”OZ” (Smolka et al., 1993),
a high-level programming language supporting con-
straints into the DIVE (Andersson et al., 1993) dis-
tributed VR environment. Both Axling and Codognet
have put emphasis on the behavior of individual ob-
jects in the virtual world and did not address user in-
teraction or interactive problem solving. As demon-
strated by Honda and Mizoguchi (Honda and Mi-
zoguchi, 1995) and Pfefferkorn (Pfefferkorn, 1975),
CP techniques are particularly appropriate for the res-
olution of configuration problems. Both have demon-
strated the suitability of CP as an approach based on
the declarative nature of the formalism which facili-
tates the description of the problem and its efficiency
for avoiding combinatorial explosion.
More recent approaches for visualizing the execu-
tion of constraint programs in VEs have been devel-
oped. For example, Fages et al., have developed a
generic graphical user interface (CLPGUI) for visu-
alizing and controlling logic programs (Fages et al.,
2004). The proposed architecture involves a CLP
process and a Graphical User Interface (GUI) which
communicate by sockets. Fernando et al., have ex-
posed the design and implementation details of a
constraint-based VE (Fernando et al., 1999). Xu et
al., have treated the combination of physics, seman-
tics, and placement constraints and how it permits to
quickly and easily layout a scene (Xu et al., 2002).
The layout task can be substantially accelerated with
a simple pseudo-physics engine and a small amount
of semantic information. Xu generalized distribu-
tions and a richer set of semantic information lead-
ing to a new modeling technique where users can
create scenes by specifying the number and distri-
bution of each class of object to be included in the
scene. Calderon et al., have presented a novel frame-
work for the use of VEs in interactive problem solv-
ing (Calderon et al., 2003). This framework extends
visualization to serve as a natural interface for the ex-
ploration of configuration space and enables the im-
plementation of reactive VEs. This implementation is
based on a fully interactive solution where both visu-
alization and the generation of a new solution are un-
der the control of user. Sanchez et al. have presented
a general-purposed constraint-based system for non-
isothetic 3D-object layout built on a genetic algo-
rithm (Sanchez et al., 2002). This system is able to
process a complex set of constraints, including geo-
metric and pseudo-physics ones. To get an easy-to-
use object-layout software, they have described the
3D-scene by using semantic and functional features
associated with the objects.
More recently, Jacquenot has developed a generic
method to solve multi-objective placement problems
for free-form components (Jacquenot, 2009). The
proposed method is a relaxed placement technique
combined with a hybrid algorithm based on both an
evolutionary algorithm and a separation algorithm.
Moreover, different elements for solving 3D regular
and complex geometry problems have been also pro-
posed.
It must be noted that these previous works are
based on CLP and Prolog (Diaz and Codognet,
2001) or genetic algorithms. However, in the
last few years, powerful CP-based solvers such as
Gecode (Schulte, 1997), CHOCO (Jussien et al.,
2009), ILOG CP (IBM, ) have been developed. Un-
like CLP and Prolog, these CP-based solvers are de-
signed as library. In addition, they provide an API to
developers to embed constraint programming in an-
other program written in an object language (C++ or
Java). Moreover, they are not dependent on logic pro-
gramming and make it easy to use constraints in an
independent and efficient solving engine.
The development of CHOCO started in 1999
within the OCRE project, a French national initia-
tive for an open constraint solver for both teach-
ing and research applications. CHOCO is an open
source java library for CSP and CP. It is built on
INTERACTIVE CONFIGURATION OF RESTRICTED SPACES USING VIRTUAL REALITY AND CONSTRAINT
PROGRAMMING TECHNIQUES
385

an event-based propagation mechanism with back-
trackable structures. Gecode is also an open source,
free, portable, accessible, and efficient environment
for developing constraint-based systems and applica-
tions. Gecode can be easily interfaced to other sys-
tems.It supports the programming of new propagators
(as implementation of constraints), branching strate-
gies, and search engines. New variables can be pro-
grammed at the same level of efficiency as integer
and set variables that ship. Another very powerful
CP-based solver is IBM ILOG CP Optimizer (com-
mercial tool). It uses CP to solve detailed schedul-
ing problems and combinatorial problems not easily
solved using mathematical programming methods.
Our approach, based on Gecode extends the work
of Calderon et al. in different directions. For instance,
in terms of mechanisms of user interaction, we envis-
age to offer more interactivity to the user for more
efficient object manipulation (Bukowski and Squin,
1995; Kallman and Thalman, 1999; Stuerzlinger and
Smith, 2000). As well, taking advantage of the in-
cremental capabilities of the CP-based solver, we will
give the user the possibility of adding objects and to
select the constraints for those objects from a set of
predefined constraints and to provides more feedback
from the configuration. An explanatory module that
would provide the user for justifications for the pro-
posed solutions will be envisaged. Such a module is
required to explain why there is no acceptable solu-
tion for some object positions proposed by the user.
3 HUMAN-SCALE HAPTIC VE
This section presents the human-scale VE called
VIREPSE that provides force feedback using the SP-
IDAR system (Space Interface Device for Artificial
Reality) (Richard et al., 2006). Stereoscopic images
are displayed on a rear-projected large screen (2m x
2.5m) and are viewed using polarized glasses. In or-
der to provide force feedback to the user’s hands, four
motors are placed on the corners of a cubic frame sur-
rounding the user. By controlling the tension of each
string, the system generates appropriate forces.
3.1 System Workspace
VIREPSE workspace could be divided into two
spaces: (1) reachable space that gathers every point
users can reach with hands, and (2) haptic space that
gathers every point where the system can produce a
force in any direction (Fig. 1).
Figure 1: Illustration of the system workspace.
Figure 2: Framework for the application of contact forces
on the user hand.
3.2 Position Measurement
Let the coordinates of the user’s hand position be
P(x, y, z), which represent both the hand position, and,
l
i
, the length of the i
th
string (i = 0, 1, 2, 3). Let the
four motors be on four non-adjacent vertices of the
SPIDAR cubic frame. Then, P(x,y,z) must satisfy the
equations (1) as illustrated in Fig. 2.
l
0
2
= (x + a)
2
+ (y + a)
2
+ (z + a)
2
l
1
2
= (x − a)
2
+ (y − a)
2
+ (z + a)
2
l
2
2
= (x − a)
2
+ (y + a)
2
+ (z − a)
2
l
3
2
= (x + a)
2
+ (y − a)
2
+ (z − a)
2
(1)
Let the length of the SPIDAR cubic frame be 2a
(Fig. 2). After some mathematical manipulations, we
can obtain the position of the user’s hand in function
of the lengths l
i
(equations 2) :
x =
l
0
2
−l
1
2
−l
2
2
+l
3
2
8a
y =
l
0
2
−l
1
2
+l
2
2
−l
3
2
)
8a
z =
l
0
2
+l
1
2
−l
2
2
−l
3
2
)
8a
(2)
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
386

Let the resultant force felt by the operators be f
and the unit vector of the tension be
−→
u
i
, (i = 0, 1, 2, 3).
f is given by equation 3.
−→
f =
3
∑
i=0
k
i
−→
u
i
, k
i
> 0
(3)
k
i
represents the tension value of each string.
4 3D-OBJECT LAYOUT
WITHOUT CP
In this section we describe how 3D-object layout is
currently achieved using our human-scale VE (with-
out CP). Although this approach may be viable for
3D-object layout in simple environments with very
limited and non-demanding constraints, it cannot be
applied in more complex situations involving many
objects and constraints. As illustrated in Figure 3, the
user selects and moves 3D-objects in space using a
direct manipulation technique. To select a given ob-
ject, the user has to place a 3D cursor (small cube) in-
side the volume of this object and close his/her hand.
A dataglove is used to detect user’s hand configura-
tion (open or closed). Then, the user’s hand move-
ment is mapped to the movement of the selected ob-
ject. In order to increase the system accuracy and to
allow the user to rotate the 3D-objects is space, a mo-
tion capture system is used. Thus, the dataglove was
equipped with a set of reflective markers (grey cir-
cles in Fig. 3). In order to improve depth perception
through real-time head tracking (motion parallax), a
reflective marker was placed on a cap worn by the
user. Multi-modal feedback is used to prevent the user
to move beyond the limits of the layout environment
and to help him to correctly layout the objects.
5 INTERACTIVE APPROACHES
USING CP
Our system will aim to be real-time 3D environment
based on Constraint Programming (CP) that support
interactive problem solving and produce solutions
within a time frame matching that of user interac-
tion. Through communication with threads, user in-
teraction and user constraints choice will be converted
in real-time into appropriate CP-solver queries which
will be translated back into automatic reconfigura-
tions of objects in the VE. In others words, interacting
with objects in the VE and selecting the constraints
for that object will serve as inputs to the CP-based
solver which will output new solutions for object con-
figurations.
Figure 3: Interactive 3D-object layout using the human-
scale stringed-based haptic virtual environment(without
CP).
In addition, this system will allow to present to
the immersed user several solutions (feasible config-
urations) that he/she will be able to explore.
The solving mechanisms of many constraint systems
will be triggered by any modification of variable val-
ues or/and constraints. In our case, user interaction
with the virtual objects will be translated into input to
the CP-based solver by selecting the variables whose
values have been altered by the interaction and adding
the constraints whose have been chosen from the con-
straints menu. For instance, when visualizing a con-
figuration of objects, the user can alter the position of
certain objects which modify the constraints involv-
ing these objects. This triggers the CP-based solver
on a new set of variables and constraints. The solver
in turn outputs resulting solutions in the form of new
object configurations within the 3D environment. The
user will then be able to freely interact with objects.
Solution space exploration will start by proposing a
first solution (configuration of objects) and will al-
low the user to explore other possible configurations.
Once the user has selected a configuration, he will be
able to interact with it by displacing the constituent
objects.
5.1 New Approaches
Once the 3D objects and the constraints have been se-
lected by the user, the system will begin geometrical
computing with the aim to verify if the selected ob-
jects can be placed within the environment. Then,
the user will have three possibilities for interaction
with the 3D-object configuration, illustrated in Fig. 6,
Fig. 4 and Fig. 5, and described the following para-
graphs.
INTERACTIVE CONFIGURATION OF RESTRICTED SPACES USING VIRTUAL REALITY AND CONSTRAINT
PROGRAMMING TECHNIQUES
387
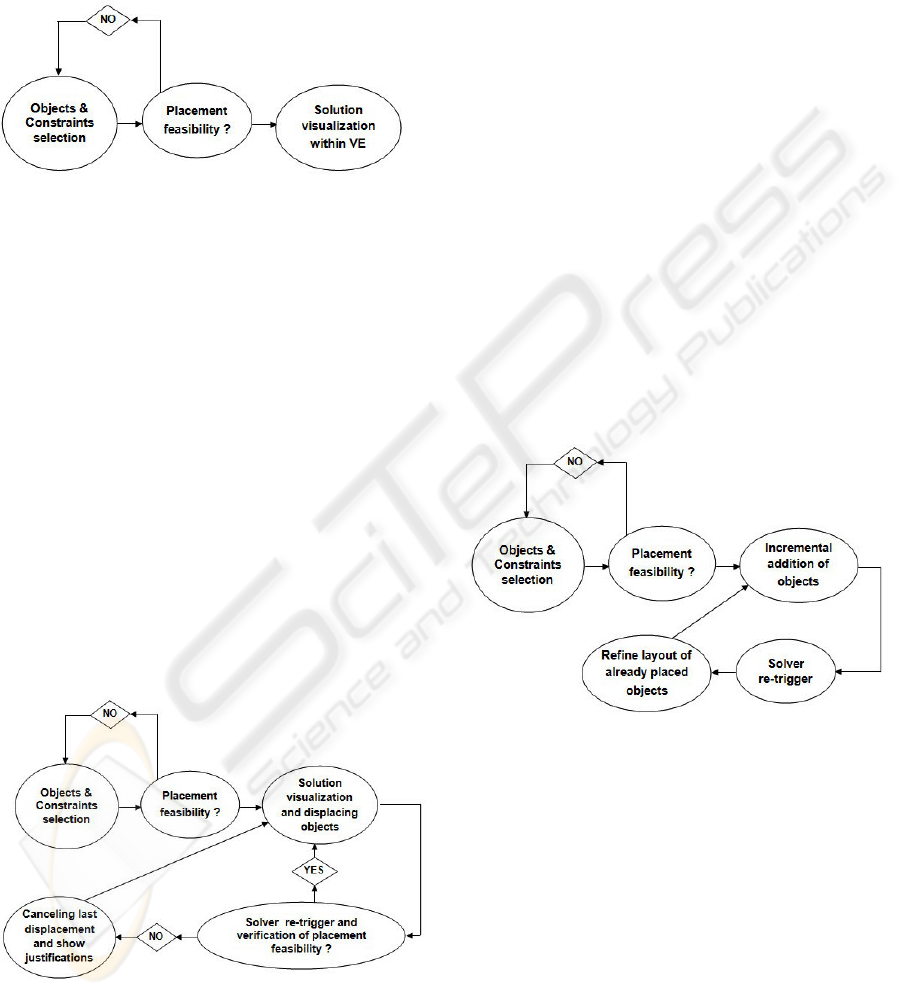
First Approach. As a response to constraints and
objects selection, a feasible configuration will be
computed by CP-based solver and displayed within
the VE. In this case, only solution visualization will
be proposed. Thus, the user will not be able to interact
with the VE.
Figure 4: Illustration of the first approach.
Second Approach. It is similar to the first ap-
proach, but the user cans interact with the proposed
solution by displacing its constituent objects. For
more immersion and accurately, the system provides
multi-modal feedback such as visual, auditory and
kinesthetic. In this case, the problem-solving mod-
ule will not be called to compute a new solution but
to verify the new set of placement constraints corre-
sponding to the user interaction. However, and taking
into account the new allocation of displaced object
(so new constraints),the system will react according
to this last displacement as follows :
• If the CP-Solver can generate a new solution with
the new set of constraints, the VE will update it-
self and proposes that solution.
• If there is no solution that response to the new
user-displacement, the system will cancel the last
displacement and gives justifications on its unfea-
sibility.
Figure 5: Illustration of the second approach.
Third Approach. The system enables the user to
add objects one by one using a specific interaction de-
vice. This in turn will disrupt the imposed constraints
and forces the system to propagate all the constraints
then generate a new solution compatible with the de-
sign requirements. Thus, the system automatically re-
configures itself as a consequence of addition of a new
object. Multi-modal feedback are also used.
After each addition, the user is still allowed to
modify manually the objects layout as described
in the two previous sections (first and second ap-
proaches). It is important to specify that user interac-
tion will not be translated to a new 3D objects layout
problem, but its only add new constraints to the set
of constraints already defined. Thus, each addition
of new object will add new constraints to the initial
ones. In the future, a particular attention will be de-
voted to extend our system to support user removing
constraints and /or objects. We will embed Gecode
in our programming environment because it allows
the implementation of many different types of con-
straints. This makes possible to represent semantic
constraints, i.e. constraints involving object proper-
ties such as materials, friction coefficient, resistance
to fire, etc. Moreover, Gecode is an open source tool
which on our team have a solid experience. How-
ever, we will use both open source tools (Gecode and
CHOCO) in our scientific approach.
Figure 6: Illustration of the third approach.
6 CONCLUSIONS
We have presented a human-scale multi-modal virtual
environment (VE) that has been developed for basic
computer-aided design purposes. The user selects and
manipulates 3D objects in space. Haptic feedback
is provided using a large-scale string-based device.
In complex situations involving 3D-objects layout in
large constrained environments, artificial intelligence
techniques are required. We argue for the integration
of Constraint Programming (CP) techniques based on
recent and very efficient CP-based solvers taking into
account discrete and continuous constraints simulta-
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
388

neously. Our proposition is based on the connection
of constraints selection and user interaction which are
taking place in the environment to the inputs/outputs
of the solver. Thus, any user modification of objects
position within the environment will update the con-
straints and trigger the solver that will in turn output
resulting solutions in the form of new object configu-
rations within the 3D environment, once their place-
ment constraints have been set. In addition, we envis-
age to widen our research for providing the user with
more explanation in order to justify why there exist
no acceptable solutions for some object locations pro-
posed by the user.
REFERENCES
Andersson, M., Carlsoon, C., Hagsand, O., and Stahl, O.
(1993). Dive the distributed interactive virtual envi-
ronment, tutorials and installation guide. In Swedish
Institute of Computer Science.
Axling, T., Haridi, S., and Fahlen, L. (February 1996). Vir-
tual reality programming in oz. In Proceedings of the
3rd EUROGRAPHICS Workshop on Virtual Environ-
ments.
Bukowski, W.-R. and Squin, H.-C. (1995). Object associ-
ations. In ACM Symp. On Interactive 3D Graphics,
Monterey, CA, USA.
Calderon, C., Cavazza, M., and Diaz, D. (2003). A new
approach to the interactive resolution of configuration
problems in virtual environments. Lecture notes in
computer science, 2733:112 – 122.
Codognet, P. (1999). Animating autonomous agents in
shared virtual worlds. In Proceedings DMS’99, IEEE
International Conference on Distributed Multimedia
Systems. IEEE Press.
Diaz, D. and Codognet, P. (2001). Design and implementa-
tion of the gnu prolog system. Journal of Functional
and Logic Programming, Vol. 2001, No 6.
Drieux, G., Guillaume, F., Leon, J., and Chevassus, N.
(2005). Samira: A platform of virtual mainte-
nance simulation with haptic feedback incorporating
a model preparation process. Proceedings of Virtula
Concepts.
Fages, F., Soliman, S., and Coolen, R. (2004). Clpgui:
A generic graphical user interface for constraint logic
programming. Constraints, 9:241 – 262.
Fernando, T., Murray, N., Tan, K., and Wimalaratne, P.
(1999). Software architecture for a constraint-based
virtual environment. Proceedings of the ACM sympo-
sium on Virtual reality software and technology, pages
147 – 154.
Honda, K. and Mizoguchi, F. (1995). Constraint-based
approach for automatic spatial layout planning. In
Conference on Artificial Intelligence for Applications.
IEEE Press.
IBM. ILOG Products and solutions,
http://ftp.ilog.fr/products/cp/.
Jacquenot, G. (2009). Mthode gnrique pour loptimisation
dagencement gomtrique et fonctionnel. Thse de Doc-
torat, Ecole Centrale de Nantes.
Jussien, N., Prudhomme, C., Cambazard, H., Rochart, G.,
and Laburthe, F. (2009). choco: an Open Source Java
Constraint Programming Library.
Kallman, M. and Thalman, D. (1999). Direct 3d interaction
with smart objects. In ACM International Symposium
on Virtual Reality Software and Technology, London.
UK.
Pfefferkorn, C. (1975). A heuristic problem solving design
system for equipment or furniture layouts. Communi-
cations of the ACM, 18(5):286–297.
Richard, P., Chamaret, D., Inglese, F., Lucidarme, P., and
Ferrier, J. (2006). Human-scale virtual environment
for product design: Effect of sensory substitution. The
International Journal of Virtual Reality.
Sanchez, S., Roux, O. L., Inglese, F., Luga, H., and Gail-
dart, V. (2002). Constraint-based 3d-object layout us-
ing a genetic algorithm.
Schulte, C. (1997). Oz explorer: A visual constraint pro-
gramming tool. Proceedings of the Fourteenth In-
ternational Conference on Logic Programming, pages
286–300.
Smolka, G., Henz, M., and Wurtz, J. (1993). Object-
oriented concurrent constraint programming in oz. re-
search report. In Deutsches Forschungszentrum fur
Kunstliche Intelligenz.
Solnon, C. (2003). Programmation par contraintes.
http://www710.univ-lyon1.fr/ csolnon/Site-PPC/e-
miage-ppc-som.htm.
Stuerzlinger, W. and Smith, G. (2000). Efficient manipula-
tion of object groups in virtual environments.
Xu, K., Stewart, J., and Fiume, E. (2002). Constraint-
based automatic placement for scene composition. In
Graphics Interface Proceedings, University of Cal-
gary.
Zorriassatine, F., Wykses, C., Parkin, R., and Gindy, N.
(2003). A survey of virtual prototyping techniques for
mechnanical product development. Journal of Engi-
neering Manufacture, 217-part B.
INTERACTIVE CONFIGURATION OF RESTRICTED SPACES USING VIRTUAL REALITY AND CONSTRAINT
PROGRAMMING TECHNIQUES
389
