
A STATISITICAL SHAPE MODEL FOR DEFORMABLE
SURFACE REGISTRATION
Wei Quan, Bogdan J. Matuszewski and Lik-Kwan Shark
Applied Digital Signal and Image Processing (ADSIP) Research Centre
University of Central Lancashire, Preston PR1 2HE, U.K.
Keywords: Deformable Registration, Surface Matching, Shape Modelling and Face Articulation.
Abstract: This short paper presents a deformable surface registration scheme which is based on the statistical shape
modelling technique. The method consists of two major processing stages, model building and model
fitting. A statistical shape model is first built using a set of training data. Then the model is deformed and
matched to the new data by a modified iterative closest point (ICP) registration process. The proposed
method is tested on real 3-D facial data from BU-3DFE database. It is shown that proposed method can
achieve a reasonable result on surface registration, and can be used for patient position monitoring in
radiation therapy and potentially can be used for monitoring of the radiation therapy progress for head and
neck patients by analysis of facial articulation.
1 INTRODUCTION
The registration of 3-D surfaces can be considered
as a subset of the general image registration problem
as surveyed by Maintz and Viergever (Maintz and
Viergever, 1998), and has been for many years of
great interest to computer vision community
(Audette et al., 2000). Its applications include
biomedical modelling (Vrtovec et al., 2004),
automated segmentation of medical images
(Lamecker et al., 2003), integrating multiple range
scans into a 3-D model (Hahnel et al., 2003), visual
navigation (Zhang, 1994) and recognition of objects
from database (Lu et al., 2006), etc. In general,
surface registration can be partitioned into three
major components: choice of transformation model,
similarity measure, and optimization method.
The first component concerns the assumptions
made about the relation between the surfaces which
need to be registered. Transformation models can be
roughly classified into two categories, rigid and
deformable. A general rigid transformation can be
expressed as a superposition of rotation and
translation. Deformable transformation could be
similarity, affine, perspective, B-spline, radial basis
function, etc (Audette et al., 2000). The second
component determines what type of characteristic
needs to be extracted from 3-D surfaces. Generally,
the spectrum of surface characteristics includes
landmarks, curves, regions, and dense point sets.
Landmarks are well-localised, sparse loci of
important geometric significance (Thirion, 1994).
Landmarks are frequently determined using
computed surface curvatures or are selected
manually. Curve features typically consist of
differential structures which are usually extracted
from ridges or boundaries between two different
regions in the surfaces (Maintz et al., 1996). Region
features are defined by the areas processing some
homogeneous characteristics, such as consistent
curvature signs (Toriwaki and Yokoi, 1988). Dense
point sets are the feature which constitutes all or
significant subset of all available surface points
(Besl and McKay, 1992). The third component is
about finding parameters of the transformation
which could maximise the similarity measure. This
usually includes the search for the correspondence of
surface characteristics which are used for measuring
the similarity of surfaces. Some frequently used
methods are the random sample consensus
(RANSAC) (Chen et al., 1999), expectation
maximization (EM) (Granger et al., 2001), various
ICP algorithms (Hahnel et al., 2003), etc.
In this paper, a novel method for deformable
surface registration is proposed based on the
authors’ previous work (Quan et al., 2009), which
uses the statistical shape modelling technique to
achieve the deformable registration. The whole
545
Quan W., J. Matuszewski B. and Shark L. (2010).
A STATISITICAL SHAPE MODEL FOR DEFORMABLE SURFACE REGISTRATION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 545-549
DOI: 10.5220/0002895705450549
Copyright
c
SciTePress
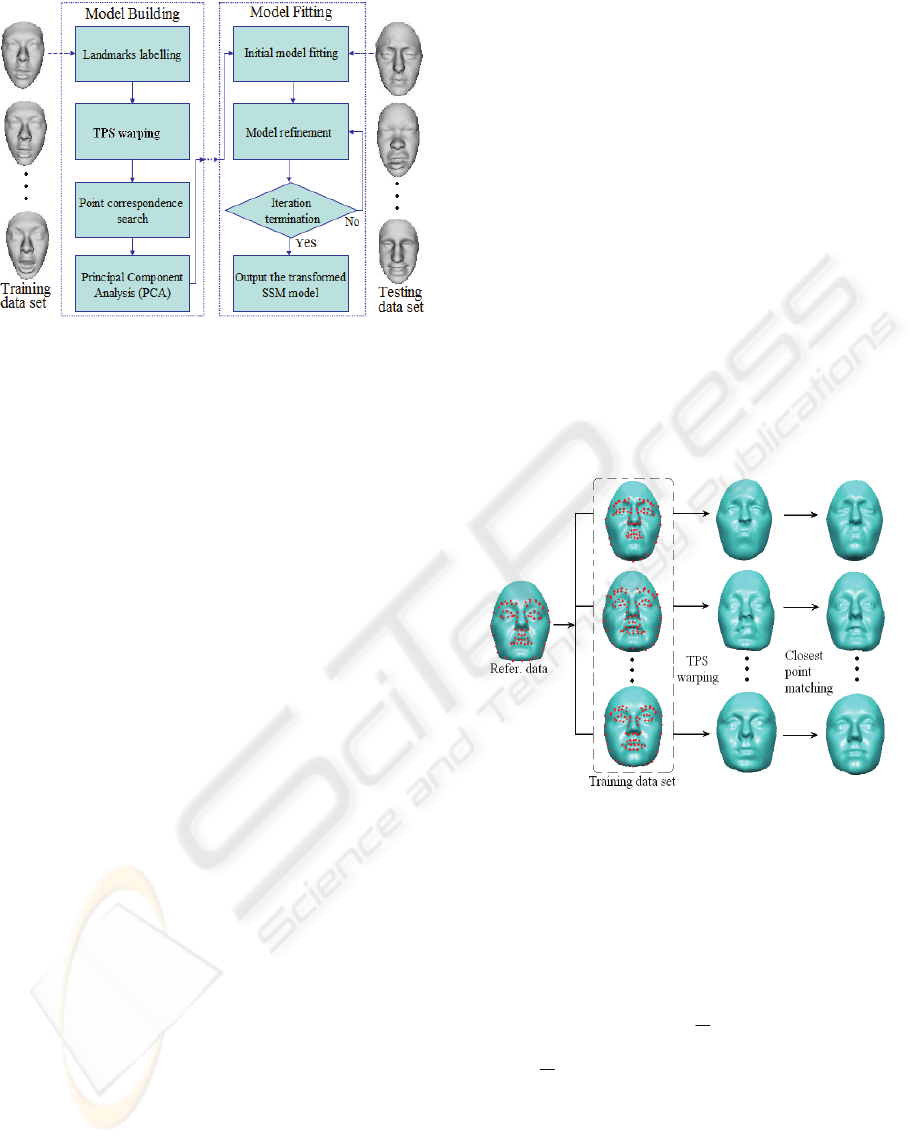
Figure 1: A general framework of proposed surface
registration method.
registration contains two main processing stages:
model building and model fitting, as illustrated in
Figure 1. In the model building stage, all data in the
training set are aligned together. Subsequently the
correspondences of point between each training data
are established, and a statistical shape model (SSM)
is constructed by applying the principal component
analysis (PCA) technique. In the model fitting stage,
the built SSM is roughly aligned with the new data
followed by the iterative model refinement using a
modified ICP algorithm. The proposed method is
applied to facial surfaces in BU-3DFE database (Yin
et al., 2006) that are captured from real persons. This
can be considered as an assessment tool for facial
articulation. Authors believe that it can be used for
monitoring the progress of radiation therapy for head
and neck patients on a daily bases.
The remainder of this paper is organised as
follows. Section 2 describes details of construction
of the SSM. Section 3 explains the procedure of
model fitting process. Finally, concluding remarks
are given in Section 4.
2 MODEL BUILDING
The SSM is developed based on the point
distribution model (PDM) which was first proposed
by Cootes et al. (Cootes et al., 1995), and it is one of
the most widely used techniques for data
registration. Building a statistical shape model is the
first processing stage of the proposed surface
registration method, which involves two phrases of
calculation, estimating dense point correspondence
and PCA. In the following subsections, the model
building is generally introduced.
2.1 Estimating Point Correspondence
The knowledge of the dense point correspondence
between data in the training set is essential, since the
incorrect correspondence can either introduce too
much variation or illegal instance of the model. In
this work, the estimation of correspondence is
achieved in three steps: (i) landmarks determination,
(ii) thin-plate spline (TPS) warping, and (iii) closet
point matching. The first step is to identify the
corresponding landmarks on the selected reference
data and other training data. The second step is to
warp the reference data to different training data
using TPS transformation that is calculated based on
the selected landmarks as control points. The last
step is to estimate the point correspondence between
warped reference data and different training data
based on the closest distance metric. Figure 2 shows
the framework of computing the dense point
correspondences for all training data.
Figure 2: Framework of point correspondence estimation
for the training data set.
2.2 Principal Component Analysis
Having the estimated point correspondences for all
training data, a statistical shape model can be built
using standard PCA, and approximately represented
using a linear model of the form
l
Q=Wb+Q
(1)
where
Q is the mean vector of all training
data,
1
[,... ]
K
=
Wuuis a so called “Shape Matrix” of
K eigenvectors which correspond to the K largest
eigenvalues , and
1
[ ,..., ]
K
bb
=
b is the shape space
vectors (SSV) which controls the contribution of
each eigenvector that are calculated by PCA, in the
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
546

Figure 3: From top to bottom: superposition of the mean
vector and weighted first three principal components. In
each case the principal component weights vary between
3
i
λ
± .
approximated surface
l
Q . The details of PCA
deduction can be found in (Quan et al., 2009).
Figure 3 shows the effect of varying the first three
largest principal component of the SSM which is
built using 450 training data from BU-3DFE
database.
3 MODEL FITTING
Model fitting is an iterative surface matching
process which includes the estimation of both pose
and shape parameters of the built SSM. Whilst the
pose parameters contain a translation vector, a
rotation matrix and a scaling factor, the shape
parameters are defined by the SSV. As described in
the following subsections, the algorithm starts by
aligning a new data with the mean vector of SSM
using similarity transformation. Subsequently the
model continues to be refined by iteratively
estimating the SSV and pose parameters.
3.1 Initial Alignment
The purpose of initial alignment is to generally
match the SSM to the new data without deforming
itself. The ICP scheme (Besl and McKay, 1992) and
similarity transformation are used together to
achieve the alignment, which iteratively refine the
alignment by alternatively estimating point
correspondence and finding the best similarity
transformation that minimises a cost function
between the corresponding points. In this work the
cost function is defined using Euclidean distance
2
'
1
()
N
ii
i
Es
=
=−+
∑
qRqt
(2)
where
'
i
q and ( 1,..., )
i
iN
=
q are respectively the
corresponding points from the model and the new
data.
R is a rotation matrix, t is a translation vector
and
s
is a scaling factor. They can be calculated
directly following the algorithm in (Umeyama,
1991). Figure 4 shows some intermediate results
obtained during the initial alignment.
Figure 4: Some intermediate results obtained during the
initial alignment.
3.2 Model Refinement
The objective of the model refinement is to deform
the model so that it is better matched to the new data
after the initial alignment. This requires for a further
optimisation of the pose parameters as well as the
shape parameters, which can be seen as a
superposition of the ICP method and the least
squares projection onto the shape space. The least
squares projection onto the shape space provides the
SSV,
b
, which controls the deformations of the
model. The SSV,
b , for an new data is calculated
from
()
T
c
b=W Q +Q
(3)
where
3N
c
R∈Q is a vector which contains
corresponding points representing the new data.
The mean vector of all training data
Q
and shape
matrix
W are computed through the PCA as shown
in Equation 1.
From Equation 3, it can be seen that the size
(dimension) of SSV is fixed during iterations of
model refinement. Using the fixed size of SSV
A STATISITICAL SHAPE MODEL FOR DEFORMABLE SURFACE REGISTRATION
547

Figure 5: From left to right: new data, corresponding SSM
using fixed large size of SSV, and corresponding SSM
using fixed small size of SSV.
can usually provide a reasonable final result of
refinement if a good initial alignment is achieved.
Otherwise, it may mislead the minimization of the
cost function for the model refinement towards a
local minimum, i.e., approximating to an
inappropriate shape. This is because when a large
size of SSV is used, the model will have high degree
of freedom for generating shapes, but with an
incorrect initial alignment this freedom can make the
model approximate to an incorrect arbitrary shape,
which leads to a failure result of the refinement
eventually. On the other hand, although a model
with the small size of SSV has low degree of
freedom, which constraints the deformation
capability of the model and prevents it from
generating an arbitrary shape, it also limits the
model to evolve to the right shape. Figure 5 shows
some failure examples of refinement in which the
sizes of SSV used are fixed.
In order to solve the problem caused by the fixed
size of SSV, the authors proposed a model
refinement process using a SSV with the adaptive
size in this work, and the Equation 3 needs to be
rewritten as
()
T
k
kc
b=W Q+Q
(4)
Figure 6: Example of intermediate results obtained during
iteration of the model refinement. The new data which
needs to be matched is shown in Figure 5.
where
k
b is the SSV with the adaptive size, and
k
W is the corresponding shape matrix estimated
separately for each k).
k
indicates level of the
refinement. In the beginning of the refinement SSV
has a small size. Although the registration error can
be very big at this stage, the algorithm is able to
provide rough approximation of the data. When the
registration error is decreased, the size of SSV will
be gradually increased, which provides more shape
flexibility and allows the model to match the data.
Parts of intermediate results of the model refinement
are shown in Figure 6. In the figure, it can be seen
that using the SSV with the adaptive size the model
refinement is able to provide a smooth transition
during the iterations and eventually deform the
model to the right shape even in the case that the
result of initial alignment is not very good.
4 CONCLUSIONS
This paper describes a novel deformable surface
registration method which uses statistical shape
modelling technique and the modified ICP scheme.
In order to avoid the local minima of the cost
function of the model refinement process, a SSV
with the adaptive size is proposed which enables the
SSM eventually converge to the right shape even if
the initial alignment does not provide a reasonable
result. The proposed method is successfully applied
to the real facial data from BU-3DFE database, and
it can model well with different facial shape across
genders, races or expressions. This suggests that the
proposed method can be potentially used for some
associated medical applications, such as the
quantification of 3D face articulation for early
predication and assessment of facial dysfunctions or
the progress monitoring of radiation therapy for head
and neck patients.
ACKNOWLEDGEMENTS
The work presented in this paper has been supported
from the MEGURATH and the TERAFS projects
(EPSRC Project No.EP/D077540/1, EP/H024913/1)
REFERENCES
Audette M F. P.,. A., Ferrie Peters T. M., 2000. An
algorithm overview of surface registration techniques
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
548

for medical imaging, Medical Image Analysis, Vol. 4,
201-217. Elsevier science.
Besl P. J., McKay N. D., 1992. A method for registration
of 3-D shapes, IEEE Trans. PAMI, vol. 14(2), 239-
256.
Chen C. S., Huang Y. P., Cheng J. B., 1999. Ransac-based
darces: a new approach to fast automatic registration
of partially overlapping range images, IEEE Trans.
PAMI, vol. 21(11), 1229-1234.
Cootes T. F., Taylor C. J., Cooper D. H., Graham J., 1995.
Active shape models – their training and application,
Computer Vision and Image Understanding, vol.
61(1), 38-59.
Granger S., Pennec X., Roche A., 2001. Rigid point
surface registration using an EM variant of ICP for
computer guided oral implantology, Medical Image
Computing and Computer-Assisted Intervention, 752-
761.
Hahnel D., Thrun S., Burgard W., 2003. An extension of
the ICP algorithm for modelling nonrigid objects with
mobile robots, Proceeding of the International Joint
Conference on Artificial Intelligence, 1-6.
Lamecker H., Lange T., Seebass M., 2004. Segmentation
of the liver using a 3D statistical shape model, ZIB-
Report 04-09.
Lu X., Jain A., Colbry D., 2006. Matching 2.5D face scans
to 3D models, IEEE Trans. PAMI, vol. 21(12),1357-
1362.
Maintz J. B. A., Van den Elsen P. A., Viergever M. A.,
1996. Evaluation of ridge seeking operators for
multimodality medical image matching, IEEE Trans.
PAMI, vol. 18(4), 353-365.
Maintz J. B. A., Viergever M. A., 1998. A survey of
medical image registration, Med. Image Anal., vol.
2(1), 1-36.
Quan W., Matuszewski B. J., Shark L. K., Ait-Boudaoud
D., 2009. Facial expression biometric using statistical
shape models, EURASIP Journal on Advances in
Signal Processing, vol. 2009.
Thirion J. P., 1994. External points: definition and
application to 3D image registration, Proceeding of
Computer Vision and Pattern Recognition, 587-592.
Toriwaki F. I., Yokoi S., 1988. Voroni and related
neighbours on digitised two-dimensional space with
application to texture analysis, Computational
Morphology.
Umeyama S., 1991. Least-square estimation of
transformation parameters between tow point
patterns, IEEE Trans. on VCG, vol. 13(4), 376-380.
Vrtovec T., Tomazevic D., Likar B., Travnik I., Pernus F.,
2004. Automated construction of 3D statistical shape
models, Image Anal Stereo, vol. 23(1), 111-120.
Yin L., Wei X., Sun Y., Wang J., Rosato M., 2006. A 3D
facial expression database for facial behaviour
research, International Conference on Automatic Face
and Gesture Recognition, 211-216.
Zhang Z., 1994. Iterative point matching for registration
of free-form curves and surfaces, International
Journal of Computer Vision, Vol. 13(2), 119-152.
A STATISITICAL SHAPE MODEL FOR DEFORMABLE SURFACE REGISTRATION
549
