
PERFORMANCE GAIN FOR CLUSTERING WITH GROWING
NEURAL GAS USING PARALLELIZATION METHODS
Alexander Adam, Sebastian Leuoth, Sascha Dienelt and Wolfgang Benn
Department of Computer Science, Chemnitz University of Technology, Straße der Nationen 62, 09107 Chemnitz, Germany
Keywords:
Neural net, Growing neural gas, Parallelization.
Abstract:
The amount of data in databases is increasing steadily. Clustering this data is one of the common tasks in
Knowledge Discovery in Databases (KDD). For KDD purposes, this means that many algorithms need so
much time, that they become practically unusable. To counteract this development, we try parallelization
techniques on that clustering.
Recently, new parallel architectures have become affordable to the common user. We investigated especially
the GPU (Graphics Processing Unit) and multi-core CPU architectures. These incorporate a huge amount of
computing units paired with low latencies and huge bandwidths between them.
In this paper we present the results of different parallelization approaches to the GNG clustering algorithm.
This algorithm is beneficial as it is an unsupervised learning method and chooses the number of neurons
needed to represent the clusters on its own.
1 INTRODUCTION
Knowledge Discovery in Databases (KDD) is the pro-
cess of preparing and processing data, and afterwards
the evaluation of the results that emerged from that
data. In the processing step of KDD often includes a
clustering. When using neural networks, in the train-
ing of these networks much time is spent, especially
when many neurons are used and huge amounts of
data have to be processed. Neural networks cannot
be utilized with too much data, as the training would
not finish in acceptable time. Parallelization seems to
be a way to minimize the computing time, needed for
such a training.
Modern computing platforms often comprise a
huge number of processing units. CPUs as well
as GPUs (Graphics Processing Units) (Szalay and
Tukora, 2008) and small desktop clusters (Reilly
et al., 2008) are examples for these platforms. They
are more and more in the scope of high performance
computing. With their huge amount of computing
units it seems reasonable to compare different paral-
lelization approaches with regards to how they scale
with an increasing degree of parallelism.
In our work we use the GNG algorithm, first intro-
duced by Fritzke (Fritzke, 1995). The GNG offers the
possibility to only give an upper bound on the number
of neurons. It decides for itself, if that number has to
be exhausted. After the learning phase the connec-
tions between the neurons indicate clusters of data
vectors in relative proximity to each other. This
clustering property is then used in the ICIx (G¨orlitz,
2005), a new data base indexing structure.
2 RELATED WORK
Other approaches have been undertaken to parallelize
neural networks. Especially the longer known SOMs
(Kohonen, 1982) have been in the scope of these ef-
forts. In Labont´e (Labont´e and Quintin, 1999) the
neurons were distributed on different computers. It
was found, that for large numbers of neurons a nearly
linear speedup can be achieved. However, we do not
use that huge numbers of neurons but their results can
be an orientation for our work.
Another work has been done by Ancona (Ancona
et al., 1996). He examined parallelization on Plastic
Neural Gas networks. In these special networks the
dependencies between the neurons are not as strong
as in GNG networks. He distributes the training data
vectors on different computing nodes which each hold
only a fraction of the hole network. Through a special
update strategy he achieves a speedup in the number
of computing units used.
Another way to speed up especially hierarchical
264
Adam A., Leuoth S., Dienelt S. and Benn W. (2010).
PERFORMANCE GAIN FOR CLUSTERING WITH GROWING NEURAL GAS USING PARALLELIZATION METHODS.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
264-269
DOI: 10.5220/0002903502640269
Copyright
c
SciTePress

clustering is shown by G¨orlitz (G¨orlitz, 2005). His
clustering method first does a coarse grained cluster-
ing. Afterwards, the found clusters are further split
up. This can be easily parallelized by distributing the
first partition to as many nodes as clusters were found.
It has been shown, that the discovery of the first parti-
tion is the bottle neck of this method. We are search-
ing for ways to speed up each learning step. That does
not touch the ability to distribute our approach with
this method.
Cottrell (Cottrell et al., 2008) shows a way to do
a batch learning with a neural gas network. There
the adaption of neurons only takes place after certain
steps of presentation of data to the neural net. During
these batches the neurons do not interact with each
other. Thus these regions of the algorithm offer a
source for parallelism. We ran tests using this method.
The results are also shown later in Section 4.
3 GNG-ALGORITHM
The goal of the GNG algorithm is to adapt a net of
neurons A to represent the distribution of a given data
set D . The data records in that set are presented to the
neurons. The neurons then adapt their internal ref-
erence vector to that of the given data record. After
a certain amount of steps λ, new neurons can be in-
serted or removed from the net. Neurons can have
edges between them, signaling that they belong to a
cluster. A cluster represents an area of the data space
with the records contained in it are relatively similar.
The formula symbols used also later on are shown in
Table 1. For a listing and further discussion of the
algorithm see (Fritzke, 1995).
3.1 Non-parallel Runtime
An adaption of that algorithm is used for the results in
this paper. This variant does not remove neurons from
the net to speed up the growth. It also decreases the
adaption rates when an integer multiple of λ cycles
is near. The last change has no impact on the overall
complexity of the algorithm and will be not further
regarded. The first one decreases the computing time
and simplifies the formulas later on.
The runtime of the single steps of the GNG algo-
rithm as found in (G¨orlitz, 2005) is shown in Table 2.
In (Adam et al., 2009) we already showed that the
runtime for one step of the learning algorithm is linear
in v and d. When accumulated over all steps, it shows
that the overall runtime is lineary depending on d, λ
and |D | but is quadratic in |A |.
Table 1: Symbol definitions.
symbol description estimated size
|D | number of data
records
millions
|A | maximum number of
neurons
typically 2-100
v number of neurons
per step
2 to |A |
d dimensionality of the
records and reference
vectors
up to 1500
λ insert and remove in-
terval for neurons
ca. 100
p number of processing
units used
1-500
Table 2: Runtime components for non-parallel case.
step runtime
compute distances v· d
finding winner and second v
insert edge 1
actualize error d
actualize winner d
actualize neighbors of winner v· d
adjust multiplier 2
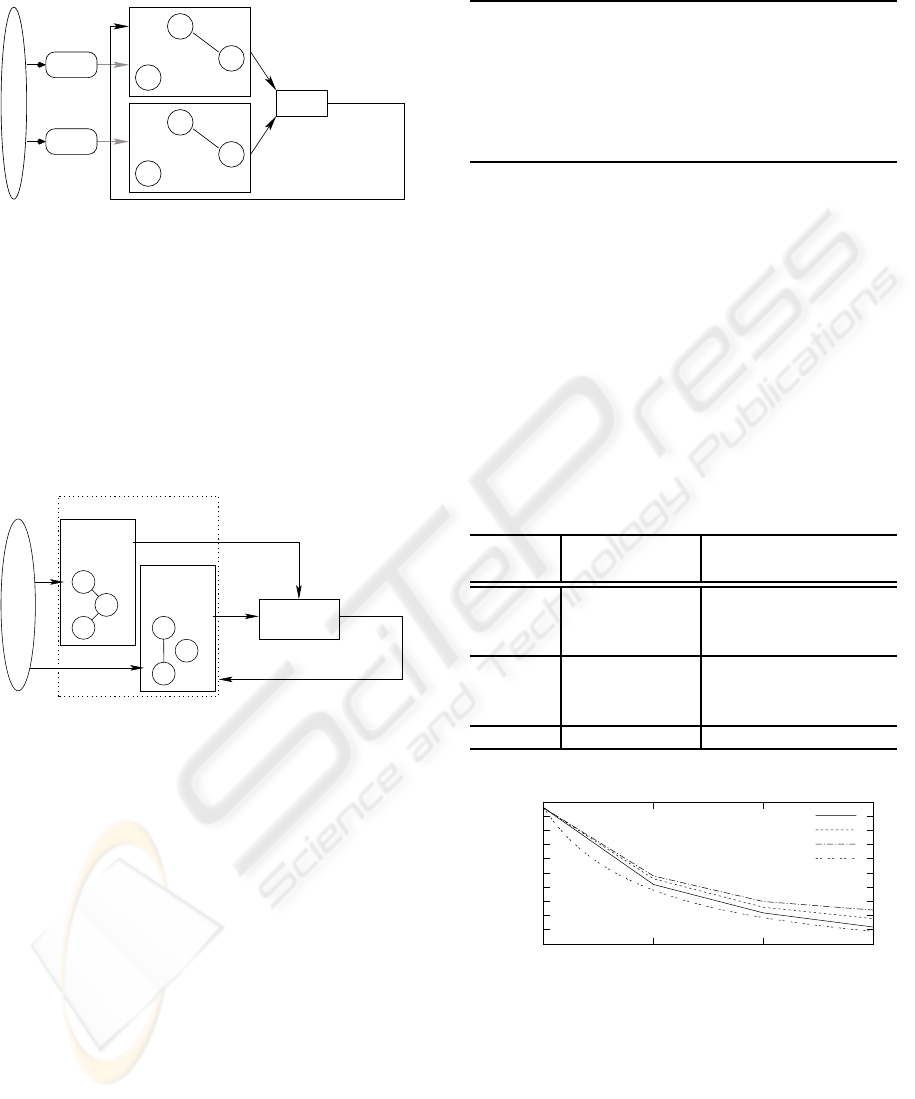
3.2 Data Parallelization
Figure 1 shows the scheme we used for our data par-
allelization approach. The data is partitioned and the
partitions then are learned by different independent
GNGs. After a certain amount of steps, these nets are
merged. Several synchronization or merge strategies
may be applied, particularly the following three were
used in this work:
1. Average: This method takes two neural nets and
does a position based average of the neurons
weight vector.
2. Batch: Another variant is to not move the neurons
during the training phase and accumulate their
movement in a variable ∆
i
for each net i. Out of
these ∆
i
an average is computed and this average
is applied to the neurons of the distributed nets.
3. GNG: The GNG algorithm itself can be applied
for the merge of two nets. The neurons of one net
are the data vectors the training of the other one.
Due to a cubic term we do not regard this method
further for our runtime estimations.
The equations for the runtime can be found in (Adam
et al., 2009). They show that a linear speedup in the
PERFORMANCE GAIN FOR CLUSTERING WITH GROWING NEURAL GAS USING PARALLELIZATION
METHODS
265
number of used computing units can be expected.
Input Data
Subset
Subset
GNG
0
GNG
1
Merge
distribute merged nets
Figure 1: Data parallelization scheme.
3.3 Neuron Parallelization
The neuron parallelization scheme is depicted in Fig-
ure 2. The neurons of the GNG are distributed to
different computing sites. The winner and second is
chosen in parallel and then all nets adjust their corre-
sponding neurons to the new input. In (Adam et al.,
2009) we showed, that the expected speedup is linear
in the number of computing units that are used.
Input Data
Computing
Unit
1
Computing
Unit
0
Global 1st &
2nd winner
GNG
Propagate 1st and 2nd winner
Figure 2: Neuron parallelization scheme.
4 EXPERIMENTAL RESULTS
We will now present the results of our work. First
we give an overview of the speedups gained with the
different parallelization methods on CPU and GPU.
After that we take a short look on the quality of the
data parallelization with regards to the utilized merge
strategy. For all tests the network parameters shown
in Table 3 were used.
As CPU we used an Intel
R
Core2 Q6600 (Quad
Core) processor at 2.4 GHz with 4 GB of DDR2-800
RAM. The GPU was an Nvidia GeForce 8800 GTX
SLI system with each graphics board equipped with
768 MB of GDDR3 RAM and a shader clock of 1350
MHz. The operating system was Windows Vista in
the 64 bit variant.
Table 3: Network parameters for the GNG learning.
insert interval λ
ins
= 10
winner adaption rate ε
b
= 0.1
neighbor adaption rate ε
n
= 0.002
error normalization value α = 0.001
dimensionality of the data
records
d = 96
maximal neuron number |A |
max
= 32
4.1 CPU-results
We started our tests using a CPU implementation. Ta-
ble 4 shows the results for the—theoretically better—
data parallelization. The last line shows the theoreti-
cal speedup. Aboveit is the real speedup gained. Syn-
chronization between the nets was done right before
inserting of a new neuron. It can be seen clearly, that
the speedup using the simple average method is the
best. It is nearly linear. A graphical representation
can also be found in Figure 3.
Table 4: Data parallelization computing times in sec-
onds.
merge # threads
method 1 2 3 4
runtime average 5.8 3.1 2.1 1.6
batch 5.8 3.3 2.3 1.9
GNG 5.8 3.4 2.5 2.2
speedup average 1.0 1.9 2.8 3.6
batch 1.0 1.8 2.5 3.1
GNG 1.0 1.7 2.3 2.6
speedup theoretically 1.0 2.0 3.0 4.0
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
1 2 3 4
runtime in seconds
number of threads
average
batch
GNG
theoretical
Figure 3: CPU Runtimes.
Table 5 shows the results using the neuron paral-
lelization approach. Barriers were used to synchro-
nize the different threads. The speedup—even with-
out measuring of the barriers—is not as big as at the
data parallelization. Including the barrier time, this
is because of the synchronization between the net-
work fractions that has to be done at every single data
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
266
presentation. The speedup without the barriers is not
as good as the theory would predict. One reason for
this is, that the synchronization is not done parallelly.
Also, the serial components of the algorithm might be
larger than expected.
Table 5: Neuron parallelization computing times in
seconds.
#neuron threads 1 2 3 4
without barriers 5.8 3.7 2.6 2.3
with barriers 5.8 10.0 14.7 17.3
barrier overhead 0.0 6.3 12.1 15.0
speedup
without barriers 1.0 1.6 2.2 2.5
with barriers 1.0 0.6 0.4 0.3
theoretical speedup 1.0 2.0 3.0 4.0
So we conclude that on sole multi-core CPU sys-
tems the data parallelization approach is not only the-
oretically but also practically the most promising one.
4.2 GPU-results
The second test environment were GPUs. For the
Nvidia GPUs we had at our disposal, the CUDA
framework is the programming toolkit to use. Some
limitations exist for the parallelization on these GPUs.
The structure of the GPU is so that only distinct par-
titions of the processing units can communicate effi-
ciently with each other. These partitions are called
streaming multi processors (SM) by Nvidia. The
SMs themselves consist of thread processors, that run
the actual computations. Neuron parallelization can
only happen inside such an SM due to this limitation.
(NVIDIA Corporation, 2009)
Further the GPU has dedicated memory areas, es-
pecially shared, constant, and global memory. The
constant respective texture memory are cached por-
tions of the global memory. The shared memory is
inside the SMs. These SMs also have a common reg-
ister set for all thread processors inside. The single
memory types are summed up in Table 6. Due to the
limited amount of memory, the maximum number of
neurons was 32 and the length of the vectors was lim-
ited to 96 inside one SM.
We used a hybrid parallelization due to the limi-
tations on the GPU. We distributed the data on differ-
ent SMs. Each SM then trained its own independent
net. The nets were synchronized using synchroniza-
tion methods described in Section 3.2. Inside each
SM we parallelized the neural net with neuron and
vector parallelization. Due to its complexity the CPU
computed the synchronization with the GNG-merge.
Table 6: Different memory types on Nvidia 8800
GTX GPU.
type size speed
constant ≤ 64kB fast (cached)
global whole memory slow
(uncached)
shared 16kB (16× 1kB) fast, inside SM,
comparable to reg-
isters
registers 8192 per SM very fast
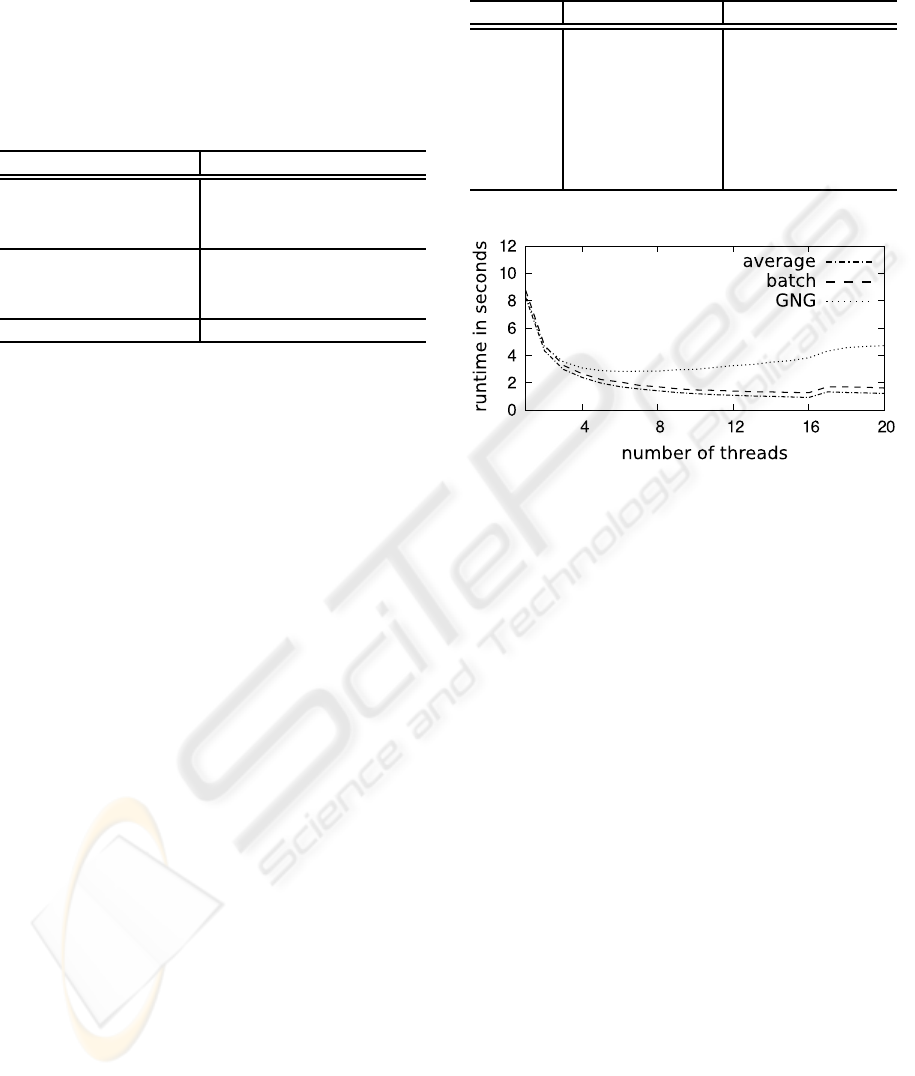
Figure 4: Runtimes for parallelization on GPU.
Figure 4 shows the final runtimes of the paral-
lelization using a mix of data, neuron, and vector
parallelization. It can be seen clearly, that using
only the neuron and vector parallelization, the GPU
is slower than the CPU implementation (one data
thread). When the data parallelization is added, the
runtimes on the GPU fall below that of the CPU.
Newer GPU generations have even more computing
units, so further speedup is expected.
4.3 Clustering Quality
The quality of the clustering was also of special inter-
est to us. That is because the data parallel approach
alters the result of the algorithm. As starting point
we took the original non-parallel variant of the GNG
algorithm. We presented the same input data, origi-
nating from Fritzke (Fritzke, 1995), to all algorithms.
Figure 5a shows the results of the non-parallel variant.
The clusters are well covered by the neurons.
The results of the batch variant are shown in Fig-
ure 5b and present the best merge method—in therms
of clustering quality—up to this point of our research.
The clusters are not as well covered as in the non-
parallel variant of the algorithm, but still show the
structure of the clusters.
We also evaluated the merge methods—using
again the GNG algorithm and the average value of the
PERFORMANCE GAIN FOR CLUSTERING WITH GROWING NEURAL GAS USING PARALLELIZATION
METHODS
267

Data
Edge
Neuron
(a) original GNG
Data
Edge
Neuron
(b) batch-merge GNG
Data
Edge
Neuron
(c) GNG-merge GNG
Data
Edge
Neuron
(d) average-merge GNG
Figure 5: Training results.
neurons. Their results are shown in Figures 5c and
5d. The GNG-merge lets the neurons collapse. This
is because for the merge only the reference vectors of
the neurons are used. At the beginning of the train-
ing, these vectors are in the center of the data vectors
and are not adapted fast enough to later represent the
data vectors. The average-merge scattered the neu-
rons and broke up clusters. This is because the neu-
rons are merged according to their number, not their
position. So neurons belonging to different clusters
could be merged. For the GNG-merge, we will try to
alter some of the parameters to get better results, but
for now the batch-merge is our favorite.
To measure the quality of the clustering, different
methods were proposed. We used the Dunn (Dunn,
1974), Goodman-Kruskal (Goodman and Kruskal,
1954), C (Hubert and Schultz, 1976), and Davies-
-Bouldin (Davies and Bouldin, 1979) index. The
quality of the clustering only changes when data par-
allelization is used. This is the only method that
changes the original GNG algorithm. In our cases this
meant a decrease—dependingon the merge method—
of the clustering quality.
Using the Goodman-Kruskal index all merge
methods are near the optimum of 1, only the GNG
method (using 16 data threads) is slightly worse. This
means that pairs of neurons inside one cluster mostly
have smaller distances between them than pairs of
neurons of different clusters. The other index operat-
ing on the distances between neurons—the C index—
showed no differentiation. The GNG method again
showed a slightly worse behavior at 16 data threads.
The Dunn index, stating that clusters are well dif-
ferentiated, is overall low. The best values for this in-
dex are gotten with the non-parallel algorithm. Then
using data parallelization the batch merge method
showed the best results at approximately 0.15 (values
greater than 1 are good).
Finally the Davies-Bouldin index was used. It is
a measure for the compactness of the clusters in rela-
tion to their distance. The batch and the GNG merge
method are at the level of the non-parallel GNG al-
gorithm. Only the average merge method showed de-
teriorating values with an increasing number of data
threads.
5 CONCLUSIONS
We have shown, that—theoretically and also
practically—a performance gain of the GNG algo-
rithm through parallelization can be achieved. Data
parallelization has the most potential but also has
its pitfalls in the synchronization methods used. We
also showed that for the used GPU architecture a
further sub-parallelization on neuron and vector level
is advantageous.
We will further explore the possibilities of the
parallelization of the GNG algorithm with regards to
other parallel architectures such as clusters. The up-
coming multi-core CPUs and GPUs, which promise
much larger numbers of computing units are in our
focus, too. (Intel, 2007) (Kowaliski, 2007) (Etengoff,
2009) (Sweeney, 2009)
REFERENCES
Adam, A., Leuoth, S., and Benn, W. (2009). Perfor-
mance Gain of Different Parallelization Approaches
for Growing Neural Gas. In Perner, P., editor, Ma-
chine Learning and Data Mining in Pattern Recogni-
tion, Poster Proceedings.
Ancona, F., Rovetta, S., and Zunino, R. (1996). A Parallel
Approach to Plastic Neural Gas. In Proceedings of the
1996 International Conference on Neural Networks.
Cottrell, M., Hammer, B., and Hasenfuß, A. (2008). Batch
and median neural gas. Elsevier Science.
Davies, D. L. and Bouldin, D. W. (1979). A Cluster Sepa-
ration Measure. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, PAMI-1(2):224–227.
Dunn, J. C. (1974). Well separated clusters and optimal
fuzzy-partitions. Journal of Cybernetics, 4:95–104.
Etengoff, A. (2009). Nvidia touts rapid GPU performance
boost. http://www.tgdaily.com/content/view/43745/
135/.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
268

Fritzke, B. (1995). A Growing Neural Gas Network Learns
Topologies. In Advances in Neural Information Pro-
cessing Systems 7, pages 625–632. MIT Press.
Goodman, L. A. and Kruskal, W. H. (1954). Measures of
Association for Cross Classifications. Journal of the
American Statistical Association, 49(268):732–764.
G¨orlitz, O. (2005). Inhaltsorientierte Indexierung auf Basis
k¨unstlicher neuronaler Netze. Shaker, 1st edition.
Hubert, L. and Schultz, J. (1976). Quadratic Assignment
as a General Data Analysis Strategy. British Journal
of Mathematical and Statistical Psychology, 29:190–
241.
Intel, C. (2007). Intel’s teraflops research chip.
http://download.intel.com/pressroom/kits/Teraflops/
Teraflops Research Chip Overview.pdf.
Kohonen, T. (1982). Self-organized formation of topolog-
ically correct feature maps. Biological Cybernetics,
43(1):59–69.
Kowaliski, C. (2007). AMD unveils microprocessor strat-
egy for 2009. http://www.techreport.com/discussions
.x/12945.
Labont´e, G. and Quintin, M. (1999). Network Parallel Com-
puting for SOM Neural Networks. Royal Military
College of Canada.
NVIDIA Corporation (2009). NVIDIA CUDA Compute
Unified Device Architecture - Programming Guide.
Reilly, M., Stewart, L. C., Leonard, J., and Gingold, D.
(2008). SiCortex Technical Summary. Technical sum-
mary, SiCortex Incorporated.
Sweeney, T. (2009). The End of the GPU Roadmap.
http://graphics.cs.williams.edu/archive/SweeneyHPG
2009/TimHPG2009.pdf.
Szalay, T. and Tukora, B. (2008). High performance com-
puting on graphics processing units. Pollack Period-
ica, 3(2):27–34.
PERFORMANCE GAIN FOR CLUSTERING WITH GROWING NEURAL GAS USING PARALLELIZATION
METHODS
269
