
EXTENDING MAS-ML TO MODEL PROACTIVE
AND REACTIVE SOTWARE AGENTS
Enyo José Tavares Gonçalves
Instituto Federal de Educação Ciência e Tecnologia do Ceará, Maracanaú, CE, Brazil
Mariela I. Cortés, Gustavo A. L. de Campos
Universidade Estadual do Ceará, Fortaleza, CE, Brazil
Viviane Torres da Silva
Universdade Federal Fluminense, Niterói, RJ, Brazil
Keywords: Proactive and Reactive Agents, Multi-agent System, Modelling Language, Conceptual Framework.
Abstract: The existence of Multi Agent System (MAS) where agents with different internal architectures interact to
achieve their goals promotes the need for a language capable of modeling these applications. In this context
we highlight MAS-ML, a MAS modeling language that performs a conservative extension of UML while
incorporating agent-related concepts. Nevertheless MAS-ML was developed to support pro-active agents.
This paper aims to extend MAS-ML to support the modelling of not only proactive but also reactive agents
based on the architectures described in the literature.
1 INTRODUCTION
Nowadays, the agent technology has been widely
applied to solve a vast set of problems. Russell and
Norvig (2003) define an agent as an entity that can
perceive its environment through sensors and act in
environment through actuators. Unlike objects, agents
are more complex entities with behavioural properties,
such as: (i) they are autonomous and not passive, and
(ii) able to interact through exchange of messages and
not by explicit task invocation (Wagner, 2003). Multi-
Agent System (MAS) is the sub-area of Artificial
Intelligence that investigates the behaviour of a set of
autonomous agents, aiming to resolve a problem that is
beyond the capacity of a single agent (Jennings, 1996).
The agent-oriented development paradigm requires
adequate techniques to explore its benefits and
features, in order to support the construction and
maintenance of this type of software (Zambonelli et al.,
2001). A simple agent is classified according to its
internal architecture that determines distinct agency
properties, attributes and mental components. These
features introduce additional complexity to the system
development. A MAS may encompass multiple types
of agents with different internal architectures (Weiss,
1999). Thus, the existence of a language to support the
modelling of different internal agent architectures is
strongly desirable
Several modelling languages have been proposed
in the literature to model agents and their systems. One
of them is called MAS-ML (Multi-Agent System
Modelling Language) (Silva and Lucena, 2004) (Silva,
Choren and Lucena, 2008a) that performs a
conservative extension to UML based on the agent-
oriented concepts defined in the conceptual framework
TAO (Taming Agents and Objects) (Silva and Lucena,
2004). In particular, the following characteristics of the
language can be highlighted: (i) the support for the
modelling of main MAS entities: agents, organization
and environments; (ii) the support for conventional
objects; (iii) the support for modelling static and
dynamic properties; (iv) the modelling of agent roles,
that are important while defining agent societies; and
(v) the clear justified extension of the UML
metamodel to model agent-related properties based on
TAO (Silva, Choren and Lucena, 2008a). Due to its
characteristics, MAS-ML is known as one of the main
adequate modelling language to model MAS.
75
José Tavares Gonçalves E., I. Cortés M., A. L. de Campos G. and Torres da Silva V. (2010).
EXTENDING MAS-ML TO MODEL PROACTIVE AND REACTIVE SOTWARE AGENTS.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
75-84
DOI: 10.5220/0002907700750084
Copyright
c
SciTePress

MAS-ML was originally designed to support the
modelling of only proactive agents that are goal-
oriented entities and guided by pre-established plans.
However, not all MAS require or permit their agents
are pro-active, as the case of simulations for an ant
colony (Dorigo and Stützle, 2004). Create goal-based
agents with plan in stochastic and partially observable
environments can be a very complex task (Weiss,
1999). Therefore, it is fundamental to extend MAS-
ML to be able to model not only proactive agents that
have pre-defined plans but also reactive ones. In
addition, MAS-ML should also be able to model
proactive agents able to create new plans and that use
utility functions to execute (Russell and Norvig, 2003).
In this paper, we describe an extension of the
MAS-ML in order to capture the reactive agents,
proactive agents with planning and proactive agents
based on utility functions. The paper is structured as
follows. The main internal architectures for agents are
described in Section 2. Section 3 briefly presents MAS-
ML modelling language. The extension of MAS-ML is
then detailed in Section 4. In Section 5 the modelling of
the TAC-SCM (Trading Agent Competition - Supply
Chain Management) (Sadeh et al., 2003) application is
presented by using the extended MAS-ML. Related
works are described in Section 6 and, finally,
conclusions and future works are discussed in Section 7.
2 AGENT ARCHITECTURES
The agent internal architectures can be categorized
based on proactive and reactive foundations.
2.1 Simple Reflex Agents
A simple reflex (or reactive) agent (Russell and
Norvig, 2003), is considered the most simple internal
architecture. Condition-action rules are used to select
the actions based on the current perception. These
rules follow the form: “if condition then action”, and
determine the action to be executed if the perception
occurs. This architecture assumes that at any time the
agent receives information from the environment
though sensors. These perceptions consist of the
representation of state aspects that are used by the
agent for making decision. A subsystem is the one
responsible for the making decisions, i.e., responsible
for processing the perception sequence and selecting
a sequence of actions from the set of possible actions
for the agent. The agent performs the selected action
upon an environment through actuators.
2.2 Model-based Reflex Agents
The structure of this kind of agent is similar to the
simple reactive agent presented before since it deals
with the information by using condition-action rules.
In order to handle partially observable environment
and to reach a more rational performance, the agent is
able to store its current state in an internal model.
According to Weiss (1999), reflex agents with
internal states select actions by using the information
in its internal states. A function called next function is
introduced to map the perceptions and the current
internal state into a new internal state used to select the
next action. Such state describes aspects of the world
(called model) that cannot be seen in the current
moment, but it was perceived previously or has come
out by inferences (Russell and Norvig, 2003).
2.3 Goal-based Agents
Sometimes, the knowledge about the current state of
the environment is not enough to determine the next
action and additional information about desirable
situations is required. Goal-based agents are model-
based agents that set a specific goal and select the
actions that lead to that goal. This allows the agent to
choose a goal state among multiple possibilities.
Planning activity is devoted to find the sequence
of actions that are able to achieve the agent's goals
(Russell and Norvig, 2003). The sequence of actions
previously established leads the agent to reach a goal
is termed plan (Silva, and Lucena, 2004) (Silva,
Choren and Lucena, 2008a). Thus, the goal-based
agent with planning involves the next function
component and also includes the following elements:
• Formulate Goal Function, which receives the state
and returns the formulated goal.
• Formulate Problem Function, which receives the
state and the goal and returns the problem.
• Planning, that receives the problem and uses search
and/or logic approach to find a sequence of actions
to achieve a goal.
• Action that is represented with its pre-conditions
and post-conditions.
2.4 Utility-based Agents
Considering the existence of multiple goal states, it is
possible to define a measure of how desirable a
particular state is. In this case, aiming to optimize the
agent performance, the utility function is responsible
for mapping a possible state (or group of states) to a
measure of utility associated, according to the current
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
76

goals (Russell and Norvig, 2003). Thus, the utility
function is incorporated into the architecture.
In addition, the utility-based agent preserves the
same elements that a goal-based agent: Next function,
formulate goal function, formulate problem function,
planning and action.
3 MAS-ML
MAS-ML was originally designed to support the
modelling of proactive agents that are goal-based and
guide by pre-established plans.
MAS-ML model all structural and dynamic aspects
defined in TAO metamodel by extending the UML
metamodel. The structural diagrams defined by MAS-
ML are Role Diagram, Class Diagram and Organization
diagram (Silva, Choren and Lucena, 2004). Using the
three static diagrams is possible model all structural
aspects of entities defined in TAO. The main element
of the agent-oriented modelling is the agent itself.
Figure 1 shows the diagram element used in static
diagrams of MAS-ML to represents agents.
Figure 1: An instance of AgentClass metaclasse.
The dynamic diagrams defined in MAS-ML are
extended versions of the UML Sequence Diagram and
Activities Diagram (Silva, Lucena and Choren, 2008b).
4 MAS-ML EXTENSIONS
This section presents the extension to MAS-ML in
order to support the modelling of agents by using
diverse internal architectures: Simple reflex, Model-
based reflex, Goal-based and Utility-based. The new
version of MAS-ML is named of MAS-ML 2.0.
According to UML (2009), tagged values,
stereotypes and constraints are extension mechanisms.
Additionally, adaptation of existing metaclasses and
definition of new metaclasses can also be used.
Stereotypes and definition of new metaclasses was
used to represent Simple reflex agents, Model-based
reflex agents, Goal-based agents with planning and
Utility-based agents. Following the architecture
definitions presented in Section 2, the characteristics that
need to be defined are Perception, Next-function,
Formulate-goal-function, Formulate-problem-function,
Planning and Utility-function. The Figure 2 illustrates
the MAS-ML metamodel extensions.
Figure 2: MAS-ML metamodel extension.
The Perception collects information about the
environment and/or other agents, without modify
them. Since there is not any metaclasse in MAS-ML
that can be used to represent such concept, the
AgentPerceptionFunction metaclass was created to
represent the agent perception.
The agent perceptions can be also represented on
the environment, since it represents the elements that
the agent can perceives and as far as the sensors of
the agent will perceives (partially or fully, for
example). Once the environment influences the
perception of the therein agents, an association was
established between the metaclasses
AgentPerceptionFunction and EnvironmentClass.
The Planning task results in a sequence of actions
in order to achieve a goal (Russell and Norvig, 2003).
In addition, the following properties are observed: (i)
unlike a plan (represented by AgentPlan in the original
MAS-ML metamodel), the sequence of actions is
created at runtime; and (ii) unlike a simple action
(represented by AgentAction in the MAS-ML
metamodel), the action of planning has a goal
associated. Thus, the new metaclass
AgentPlanningStrategy was created to represent the
planning. An association relationship between
AgentPlanningStrategy and AgentPlan was defined to
represent that the action of planning can create plans.
The metaclasses AgentPerceptionFunction and
AgentPlanningStrategy extends the BehavioralFeature
metaclass. The AgentPerceptionFunction has a
Constraint that is used to restrict the information that
can be perceived through the agent sensors.
The Next-function, Formulate-goal-function,
Formulate-problem-function and Utility-function are
special agent actions that depend on the agent internal
architecture. The <<next-function>>, <<formulate-
goal-function>>, <<formulate-problem-function>> and
EXTENDING MAS-ML TO MODEL PROACTIVE AND REACTIVE SOTWARE AGENTS
77

<<utility-function>> stereotypes was thus created and
related to AgentAction metaclass.
Finally, the condition action rules of reactive
agents, can be represented by using the agent's action
representation (Silva, Choren and Lucena, 2008a),
which may have a pre-condition attached.
4.1 Static Representation of AgentClass
The new structural and behavioural features in the
modelling of the different types of agents influence the
AgentClass metaclass representation in static diagrams.
4.1.1 Simple Reflex Agent Structure
The representation for a Simple Reflex Agent (Figure
13) does not include any structural element since
neither goals nor beliefs are inherent to this
architecture. In the lower compartment the perceptions
and actions, driven by condition-action rules and not
by a specific plan, are represented.
4.1.2 Model-based Reflex Agent Structure
The model-based reflex agents represent an upgrade
over the simple reflex agents. Thus, the definition for
the action element is kept the same. In addition, beliefs
representing the state and the next function are
included. Figure 12 presents the graphical representation
of AgentClass for a Model-based reflex agent.
4.1.3 Goal-based Agent with Plan Structure
The goal-based agents with plan have the same structure
proposed initially by Silva and Lucena (2004) including
goals, beliefs, actions and plan. Figure 1 and Figure
11 show the graphical representation of this agent.
4.1.4 Goal-based Agent with Planning
Structure
The goal-based agents with planning incorporate
additional complexity to the agent representation.
Firstly, goals are considered in order to guide the agent
behaviour. Thus, this element is included as a
structural component denoted with the <<goal>>
stereotype. In order to manipulate consistently goals
and states, the agent behaviour is enhanced with
<<perceives>>, <<formulate-goal-function>> and
<<formulate-problem-function>> elements. The already
existent <<next-function>> element is keep up. This
function receives the current perception and the beliefs
that must be updated (state).
In addition, instead of representing pre-established
plans, the planning activity is incorporated. This
activity involves a goal and uses the available actions
to create a sequence of actions. Figure 14 illustrates the
AgentClass for a goal-based agent using planning.
4.1.5 Utility-based Agent Structure
The representation for the utility-based agent consists
in a specialization of the goal-based agent with
planning. However, the <<utility-function>> element
is added to represent the function responsible for the
optimization of the gent performance. The graphical
representation of AgentClass for a pro-active agent
based on utility is illustrated in Figure 15.
Along the planning, the agents may be linked to
reach more than one goal. In this case, the occurrence
of conflicting goals or the existence of several states
meeting the goals is possible. So the utility function is
incorporated into the agent structure, in order to
evaluate the usefulness degree of the associated goals.
4.2 AgentRoleClass Static
Representation
An AgentRoleClass in MAS-ML is represented by a
solid rectangle with a curve at the bottom. Similarly to
the class representation, it has three compartments
separated by horizontal lines. The upper compartment
contains the agent role name unique in its namespace.
The intermediate compartment contains a list of goals
and beliefs associated with the role, and below, a list of
duties, rights and protocols.
Reactive agents have not explicit goals and, more
particularly, the simple reflex agents do not have
beliefs. Thus, their role representation must be adapted
(Figure 16). In addition to the representation of the
roles of simple reflex agents, roles for model-based
reflex agents include beliefs in order to partially handle
observable environments. The agent role representation
in this case is represented in Figure 17.
The features of agent roles in other architectures
are inaltered since both define beliefs and goals. The
structural changes regarding the AgentRoleClass entity
impact the Organization and Roles diagrams.
4.3 Dynamic representation
of AgentClass
Similarly to the static diagrams, the new representation
of the AgentClass influences the representation of their
behavioural features. In follows, the dynamic
representation of the different agent types is illustrated
through sequence diagrams using MAS-ML 2.0.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
78

4.3.1 Reflex Agents Representation
The agent’s perception is represented in sequence
diagram of MAS-ML by an arrow with an open mind
leaving the agent to the environment, together of the
<<perceives>> stereotype, the perception name and the
elements that agent can see (Figure 3).
Figure 3: Perception of the agent in sequence diagram.
The actions sequence of the reactive agents cannot
be defined in the analysis phase, but it is possible to
represent the set of actions with the condition or
conditions associated. Figure 4 illustrates the action
taken by a reactive agent.
Figure 4: Reactive agent action in the sequence diagram.
The next function is represented in the sequence
diagram of MAS-ML 2.0 by a closed arrow with full
head, which starts at the agent and ends at the agent,
then the stereotype <<next-function>> followed by
the name of the function. Figure 5 illustrates the next
function in the sequence diagram.
Figure 5: Sequence diagram of the next function.
Therefore, if a simple reflex agent is modelled
initially have their perception and then their actions
guided by the condition-action rules. In the case of a
Model-based reflex agent, initially we have the
perception, then the next function and, finally, its
actions guided by the condition-action rules.
4.3.2 Proactive Agent Representation
The next function is executed before the formulate goal
function and is used by two types of pro-active agents
in this paper. The next function element is represented
in the sequence diagram by a arrow full head, which
begins and ends on the agent in itself, together with the
stereotype <<next-function>> and the function name
as shown in Figure 5. Then we have the representation
of the formulate problem function in the sequence
diagram. The representation is done by an arrow full
head, which begins in the agent and ends in itself,
accompanied by the relevant stereotype. The figures 6
and 7 illustrate the formulate goal function and the
formulate problem function, respectively.
Figure 6: Formulate goal function in sequence diagram.
Figure 7: Formulate problem function in sequence diagram.
In case of agents that use planning, the actions
sequence that the agent will take to achieve the goal
cannot be advanced before its execution. In this case,
planning is represented by a closed arrow head that
begins and ends in the agent in itself accompanied by the
stereotype <<planning>>. The actions that can be used
for planning to achieve (s) objective (s) are represented
as initially defined by Silva (2004). Optionally, the
criterion or algorithm used to perform the planning can
be specified by a textual note. Figure 8 illustrates the
planning in the sequence diagram of MAS-ML 2.0.
Figure 8: Planning in the sequence diagram.
The utility function element is represented in the
sequence diagram by an arrow with full head that
begins in the agent and ends in itself, together with
the stereotype <<utility-function>>. Figure 9
illustrates the representation of the utility function in
the sequence diagram of MAS-ML 2.0.
Figure 9: Utility-function in the sequence diagram.
The agent actions in MAS-ML 2.0 are modelled
using the iteration element and combined fragment,
existing in UML. This representation allows the
modelling of any combination of actions. An example is
shown in Figure 10. Since the sequence of actions for
the agents with planning is generated at runtime, the
modelling of this sequence is not required.
The agent goal-based with plan maintains the
representation proposed by Silva (2004), as well as
the plan defined during the design phase.
In the case of agent goal-based with planning,
initially runs perception, next function, formulate goal
EXTENDING MAS-ML TO MODEL PROACTIVE AND REACTIVE SOTWARE AGENTS
79

function, formulate problem function and then
execution of its planning, which results in the
execution of possible actions associated with the agent.
Figure 10: Implementation of the actions of the agent with
planning the sequence diagram of MAS-ML 2.0.
Finally, the agent-based utility needs the
perception, next function, formulate goal function,
formulate problem function, planning, utility function
and results in actions that are performed in that order.
4.4 Dynamic Representation
of AgentClass
The features proposed by Silva, Choren and Lucena
(2005) for the activity diagram, were maintained. Thus,
each activity is represented by a rounded rectangle.
The agent beliefs are represented by a square with the
identification of the agent used by the beliefs and goals
in the upper right corner through a textual description
denoted with the <<Goal>> stereotype.
4.4.1 Reflex Agent Representation
The activity diagram of simple and model-based reflex
agent represents the behavior from perception to
action. The behavior of a simple reflex agent is
represented on the activity of MAS-ML 2.0 as follows:
the initial activity is the perception of the agent, on the
basis of the current perception the condition action
rules are used to select one of the possible actions.
Finally, the selected action is performed.
In another hand, the behavior of a model-based
reflex agent is represented on the activity of MAS-ML
2.0 as follows: the initial activity is the perception of
the agent that can be used by the next function to
update its beliefs. After that, the condition-action rules
are responsible to select one of the possible actions.
Finally the selected action is performed.
4.4.2 Proactive Agent Representation
The activity diagram of the goal-based agent with
planning represents the agent behaviour from
perception to action. The behavior of a goal-based
agent is represented on the activity of MAS-ML 2.0
as follows: the initial activity is the perception of the
agent, after that the next function updates the beliefs
based on current perception. The formulate goal and
the formulate problem functions are executed. The
planning is performed to determine the action(s)
should be taken. Finally, the selected action(s) is
performed.
The behaviour of utility-based agent is represented
on the activity of MAS-ML 2.0 as follows: the initial
activity is the perception, then, the next function updates
beliefs based on current perception. The formulate goal
function and the formulate problem function are
executed. The planning is performed to determine what
action should be taken. The utility function helps the
choice of action, and the selected actions are performed.
5 CASE STUDY
A TAC-SCM application is used to illustrate the use of
MAS-ML 2.0 where agents with different architectures
are elicited to model different strategies in the problem.
5.1 TAC-SCM
TAC (Trading Agent Competition) (Wellman et al.,
2002) is an environment that enables the achievement
of simultaneous auctions, test techniques, algorithms
and heuristics to use in negotiation. There are two
types of games in competition: TAC-Classic (Wellman
et al., 2002) and TAC-SCM (Sadeh et al., 2003).
The TAC-SCM is concerned in planning and
managing the organization activities across a supply
chain. The TAC-SCM scenario is designed to capture
the challenges in an integrated environment for
acquisition of raw materials, production and delivery of
finished goods to customers. This environment is highly
dynamic, stochastic and strategic (Arunachalam, 2004).
The game starts when one or more agents connect
to a server game. The server simulates suppliers and
customers, providing a bank, manufacturing and
service of storage of goods to individual agents. The
game occurs along on a fixed number of simulated
days, and in the end, the agent with largest sum of
money in the bank is the winner (Collins et al., 2006).
5.2 Modelling TAC-SCM
with MAS-ML
The internal architecture of each agent in TAC-SCM is
elected according to the function in the game.
The DeliveryAgent needs to satisfy the goal of
delivery products to customers. In order to achieve this
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
80

goal a sequence of actions must be executed. Thus the
representation of the DeliveryAgent is modelled by
using a goal-based with plan architecture (Figure 11).
Figure 11: A DeliveryAgent proposed to TAC-SCM.
The SellerAgent offers computers to customers
and gets the payment, and the BuyerAgent decides
when to make new request for quote and realizes the
payment. Since, reactive agents reply quickly to the
perceptions (Weiss, 1999), the BuyerAgent and
SellerAgent are modelled as reactive agents aiming
the necessity of a fast reply in auction. Figure 12 and
13 shows the BuyerAgent (Model-based reflex agent)
and SellerAgent (Simple reflex agent), respectively.
Figure 12: A BuyerAgent proposed to TAC-SCM.
Figure 13: A SellerAgent proposed to TAC-SCM.
The ProductionAgent needs to satisfy current
demand across the assembling of computers and
management of the stock. To objectify achieve this goal,
it can’t use a pre-established plan because this dynamic
scenario requires a different set of actions depending on
the current demand. Thus the ProductionAgent is a goal-
based with planning agent detailed in Figure 14.
Figure 14: A ProductionAgent proposed to TAC-SCM.
Finally, the ManagerAgent is incumbed for manage
all agents and the allocation resources. This agent tries
to maximize gain and sales. Note that its goals can be
in conflict. Thus, the most appropriate architecture in
this case is the Utility-based architecture (Figure 15).
Figure 15: A ManagerAgent proposed to TAC-SCM.
The roles of reactive agents: SellerAgent and
BuyerAgent are illustrated in the figures 16 and 17,
respectively. The roles for proative agents are not
represented since they are not affected.
Figure 16: Role of SellerAgent proposed to TAC-SCM.
Figure 17: Role of BuyerAgent proposed to TAC-SCM.
Finally, Figure 18 depicts the Organization
Diagram for TAC-SCM MAS. This diagram
represents the TacOrganization and describes the
agents and agent roles in the specific environment.
Figure 18: Organization Diagram proposed to TAC-SCM.
The activity diagrams in figures 19, 20, 21, 22 and
23 describe the behavior of each agent role.
Figure 19: Role of DeliveryAgent proposed.
EXTENDING MAS-ML TO MODEL PROACTIVE AND REACTIVE SOTWARE AGENTS
81

Figure 20: Role of SellerAgent proposed to TAC-SCM.
Figure 21: Role of BuyerAgent proposed.
Figure 22: Role of ProductionAgent proposed.
Figure 23: Role of ManagerAgent proposed.
Figure 24 describes the sequence diagram of
DeliveryAgent. Note that the actions taken by the agent
are guided by a plan, so it is a sequence of actions.
Figure 24: Sequence Diagram of DeliveryAgent.
The sequence diagram of the SellerAgent (Figure
25) shows their execution through its perceptions and a
set of actions associated with a condition-action rule.
Figure 25: Sequence Diagram of SellerAgent.
The sequence diagram of the BuyerAgent (Figure
26) illustrates the agent perception, next function and a
set of actions associated with a condition-action rule.
Figure 26: Sequence Diagram of BuyerAgent.
Figure 27 shows the sequence diagram of the
ProductionAgent. Note that the actions taken by the
agent are result of the perception, next function,
formulate goal function, formulate problem function and
planning. Moreover, its actions are represented by a set
of possible actions.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
82
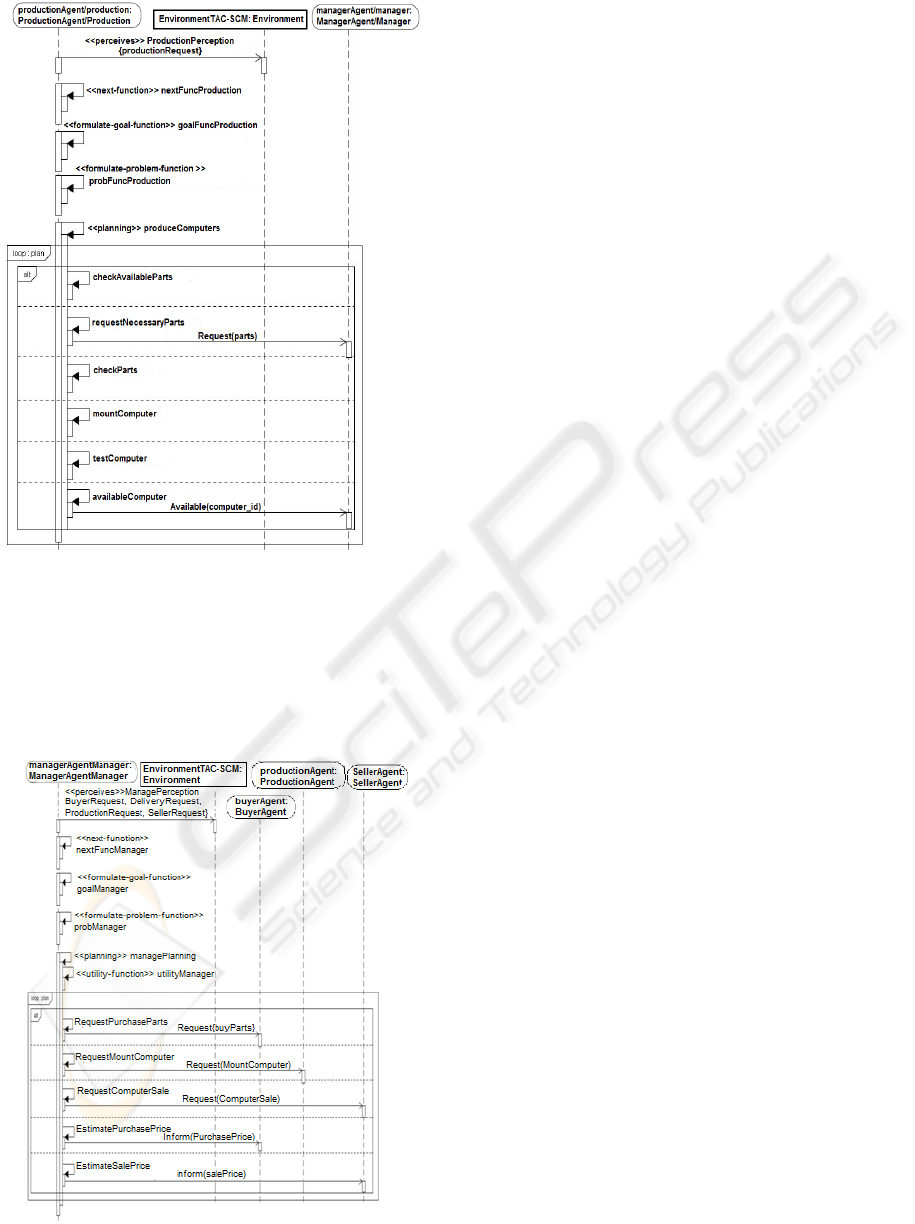
Figure 27: Sequence Diagram of ProductionAgent.
In Figure 28 is presented the sequence diagram of
ManagerAgent. In this case, the actions of the
ManagerAgent are guide by perception, next
function, formulate goal function, formulate problem
function, planning and utility function. Moreover, its
actions are represented by a set of possible actions.
Figure 28: Sequence Diagram of ManagerAgent.
6 RELATED WORKS
Several languages have been proposed for the
modelling of MAS. However, it does not support the
modelling of different internal architectures of agents
available in Russell and Norvig (2003) and Weiss
(1999). Besides, they have several drawbacks that have
justified the choosing of MAS-ML to be extended in
order to model different agent architectures.
The work of Odell, Parunak and Bauer (2000)
presents the AUML language. This modelling
language aims to provide a semi-formal and intuitive
semantics through a friendly graphical notation.
AUML does not provide elements to represent
perceptions and the next-function.
Wagner (2003) proposes the AORML modelling
language, which is based on the AOR metamodel. This
language does not give support to modelling of the
elements of the internal agent architectures. Therefore
it is not possible to differentiate agents with reactive
and proactive architectures in AORML.
Moreover, the two languages mentioned above do
not define the environment as an abstraction, so it is
not possible to model the agent migration from an
environment to another. This capability is inherent to
mobile agents modelling (Silva. and Mendes, 2003).
Choren and Lucena (2004) present the ANote
modelling language, involving a set of models, called
views. In ANote, it is not possible to differentiate
agents with reactive architectures from the proactive
ones. In addition, ANote does not support conventional
objects, used to model non-autonomous entities. The
language defines several concepts related to agents, but
the concept of agent role is not specified. This concept
is extremely important when modelling societies where
agents can play different roles at the same time.
AML (Cervenka et al., 2004) is a modelling
language based on a metamodel that enables the
modelling of organizational units, social relations,
roles and role properties. AML gives adequate support
for the modelling of reactive agents, goal-based agents
with planning and utility-agents. It is worth mentioning
though the semantic aspects of communication are
modelled as specializations of existing elements in
UML, such as methods invocation, what is not
adequate for modelling agent communication.
7 CONCLUSIONS
This paper presents an extension to MAS-ML language
in order to allow the modelling of diverse internal
agent architectures published in the agent literature,
such as: Simple reflex agents, Model-based reflex
agents, Goal-based agents and Utility-based agents.
EXTENDING MAS-ML TO MODEL PROACTIVE AND REACTIVE SOTWARE AGENTS
83

MAS-ML was originally designed to support the
modelling of pro-active goal-based agents with plan.
Thus, some issues were detected while trying to use the
language to model reactive agents and other pro-active
architectures. In this sense, the MAS-ML evolution
proposed in this work involves the definition of two
new metaclasses AgentPerceptionFunction and
AgentPlanningStrategy in order to aggregate the
representation of different agent behaviour. Also, new
stereotypes to describe the behaviour of agent from
specific architectures were defined and associated to
AgentAction metaclass. The static structure of
AgentClass and AgentRoleClass entities were also
modified. Then, the class, organization, role, sequence
and activity diagrams were changed in consistency.
The modelling tool to support the proposed
approach is also under development. Other case studies
are being conducted to provide further validation to
this work. Moreover, the possibility of MAS-ML
extension for other internal architectures, such as the
BDI architecture is an interesting possibility.
REFERENCES
Arunachalam, R, 2004. The 2003 supply chain management
trading agent competition. In: Third International Joint
Conference on Autonomous Agents & Multi Agent
Systems. July 2004. [S.l.: s.n.]. p. 113–120.
Cervenka, R., Trencansky, I., Calisti, M., and Greenwood, D
2004. AML: Agent Modeling Language Toward
Industry-Grade Agent-Based Modeling. In: Agent-
Oriented Software Engineering, pp. 31–46. Springer-
Verlag, Berlin.
Choren, R. and Lucena, C., 2004. "Agent-Oriented
Modeling Using ANote", 3rd International Workshop
on Software Engineering for Large-Scale Multi-Agent
Systems. The Institution of Electrical Engineers, IEE,
Stevenage, UK, 2004, pp. 74-80.
Collins, J.; Arunachalam, R.; Sadeh, N.; Eriksson, J.; Finne,
N.; Janson, S., 2006. The Supply Chain Management
Game for the 2007 Trading Agent Competition.
Available in http://www.sics.se/tac/tac07scmspec.pdf.
Dorigo, M. and Stützle, T., 2004. Ant Colony Optimization.
The MIT Press, Cambridge, Massachusetts.
Jennings, Nicholas R., 1996. Coordination Techniques for
Distributed Artificial Intelligence. In: Foundations of
Distributed Artificial Intelligence, pp. 187-210, Wiley.
Odell, J., Parunak, H. V. D., Bauer, B., 2000. Extending
UML for Agents. In Agent-Oriented Information
Systems Workshop at the 17th National conference on
Artificial Intelligence (AIII’00) (3-17).
Russell, S. and Norvig, P., 2003. Artificial Intelligence: A
Modern Approach, 2nd Ed., Upper Saddle River, NJ:
Prentice Hall, ISBN 0-13-790395-2,
Sadeh, N.; Arunachalam, R.; Erikson, J.; Finne, N.; Janson,
S., 2003. A supply-chain trading competition. AI
Magazine, v. 24, n. 1, p. 92–94
Silva, P. S. e Mendes, M. J. (2003). Uma Abordagem para
Incorporar Mecanismos de Inteligência Artificial a
Agentes Móveis. XXI Simpósio Brasileiro de Redes de
Computadores. Natal, Rio Grande do Norte.pp 837-
852.
Silva, V.; Lucena, C. 2004. From a Conceptual Framework
for Agents and Objects to a Multi-Agent System
Modeling Language, In Journal of Autonomous Agents
and Multi-Agent Systems, volume 9, issue 1-2, Kluwer
Academic Publishers, pp. 145-189, 2004.
Silva, V.; Choren, R.; Lucena, C. 2004. A UML Based
Approach for Modeling and Implementing Multi-Agent
Systems. In: Proceeding of the third International
Conference on Autonomous Agents and Multi-Agents
Systems. New York, USA, IEEE Computer Society,
volume 2, pp. 914-921.
Silva, V. T. da, Choren, R., Lucena, C. J. P. de (2005).
Using UML 2.0 Activity Diagram to Model Agent
Plans and Actions. In: 4th International Conference on
Autonomous Agents and Multi-Agent Systems
(AAMAS), Netherlands, pp. 594-600.
Silva, V.; Choren R.; Lucena, C. 2008 a. MAS-ML: A
Multi-Agent System Modelling Language, In
International Journal of Agent-Oriented Software
Engineering, Interscience Publishers, vol.2, no.4.
Silva, V.; Choren, R.; Lucena, C. 2008 b. Modeling MAS
Properties with MAS-ML Dynamic Diagrams. In 8th
International Bi-Conference Workshop, LNCS 4898,
Springer-Verlag, pp. 1-18.
Wagner, G., 2003. The Agent-Object-Relationship Meta-
Model: Towards a Unified View of State and Behavior.
Information Systems, v. 28, n.5, pp. 475–504.
Weiss, G., 1999. Multiagent Systems: A Modern Approach
to Distributed Artificial Intelligence. MIT Press,
Massachusetts.
Wellman, M. P.; Stone, P.; Greenwald, A.; Wurman, P. R.,
2002. The 2001 Trading Agent Competition. IEEE
Internet Computing, v. 13, p. 935–941.
UML: Unified Modeling Language Specification, version
2.2, OMG, 2009 available in: http://
www.omg.org/technology/documents/modeling_spec_c
atalog.htm#UML.
Zambonelli, F.; Jennings, N.; Wooldridge, M., 2001.
Organizational abstractions for the analysis and design
of multi-agent systems. In: Agent-Oriented Software
Engineering, LNCS 1957, Berlin: Springer, p. 127-141.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
84
