
QoS SCHEDULING FOR IEEE 802.16e MESH MODE USING
GENETIC ALGORITHMS
Neila Krichene and Noureddine Boudriga
Communication Networks and Security Research Lab, University of the 7th of November at Carthage, Tunis, Tunisia
Keywords:
IEEE 802.16e mesh mode, rtPS scheduling, Genetic algorithms.
Abstract:
IEEE 802.16e amendments for the mesh mode do not specify particular QoS mechanisms. However, each
Mesh Subscriber Station (MSS) transmits its own traffic and forwards the traffic of its children while each
traffic flow has its particular QoS constraints. As all forwarded traffics use the same link, one MSS may ex-
perience starvation or act selfishly. Besides, the MSS’s mobility adds important complexity as all the affected
flows need to be re-routed, re-admitted and re-scheduled while respecting their original QoS requirements. In
this paper, we adopt the concept of assigning five virtual nodes to each MSS reflecting the five QoS classes
of IEEE 802.16e and we propose scheduling the uplink transmissions of the real-time Polling Service (rtPS)
traffic class by adopting the Genetic Algorithms concept. We define the priority assigner component which
communicates with the scheduler of the mesh BS in order to set and update flows’ priority and we optimize the
time spent by a flow in the queue while implementing the mobility constraints within the mutation function.
1 INTRODUCTION
The recent years have been marked by a growing need
for providing advanced applications and Internet-
related services at high throughput and low costs
while guaranteeing the required QoS and a continuous
and open access to such services. In order to address
such need at the metropolitan scale, the IEEE 802.16e
amendments implement service differentiation and
adopt a connection-oriented philosophy within a mo-
bility context but they left many QoS functions un-
specified so that researchers and constructors can de-
sign and adopt the most suited mechanisms that ful-
fill particular requirements. Moreover, IEEE 802.16e
amendments for the mesh mode do not specify par-
ticular QoS mechanisms as the traffic of the mobile
Mesh Subscriber Station (MSS) along with the traffics
of all its children use the same link which has no ser-
vice or QoS parameters associated with it. Besides,
the mesh Base Station (BS) schedules the transmis-
sion and all packets originating from the mobile MSS
use the aggregate grant values regardless of their na-
ture and QoS constraints, (Kuran et al., 2006). As
all forwarded traffics use the same link, one mobile
MSS may experience starvation or act selfishly. Last
but not least, the MSS’s mobility adds important com-
plexity as all the affected flows need to be re-routed,
re-admitted and re-scheduled while respecting their
original QoS requirements.
Note that optimal QoS provision within the IEEE
802.16e context can not be fulfilled without the defi-
nition of optimal scheduling of space, frequency and
time resources over the air interface on a frame-by-
frame basis. Resources allocation and scheduling
need to dynamically adapt to the bursty and unfore-
seeable nature of the traffic while providing a large
dynamic range of throughput to specific users based
on their demand without degrading the overall net-
work performances or causing starvation to particu-
lar users or traffic flows. The implemented schedul-
ing scheme should be priority-based in order to cor-
rectly distribute the available resources among the
various flows depending on their QoS requirements.
It should also be simple, efficient and fair with a
low computational complexity and needs to guaran-
tee the throughput and delay performance. Currently,
many research activities are conducted to propose op-
timized scheduling algorithms for both the point-to-
multi point mode and the mesh mode. Nevertheless,
designing efficient scheduling methods for the mesh
mode remains a little bit harder due to the distributed
nature of the mesh mode and the constraints induced
by the multi-hop communication. Regarding optimiz-
ing the scheduling scheme, we propose to adopt the
5
Krichene N. and Boudriga N. (2010).
QoS SCHEDULING FOR IEEE 802.16e MESH MODE USING GENETIC ALGORITHMS.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 5-12
DOI: 10.5220/0002916900050012
Copyright
c
SciTePress

genetic algorithms concept which are relatively sim-
ple to implement and considered particularly appro-
priate for scheduling problems. To the best of our
knowledge, genetic algorithms have not been used to
solve traffic related problems particular to mesh net-
works.
In this paper, we aim at optimizing the schedul-
ing of the uplink transmissions of the rtPS traffic class
within the IEEE 802.16e mobile mesh context
1
while
handling the selfish behavior of the nodes and the star-
vation issues through priority assignment. Our ap-
proach uses the Genetic Algorithms concept in order
to optimize the time spent by a flow in the queue while
implementing the mobility constraints within the mu-
tation function. To the best of our knowledge, Gnetic
Algorithms have not been used before for optimizing
scheduling while respecting QoS constraints within
the wireless mobile mesh networking context.
Moreover, we dissuade mobile MSSs from act-
ing selfishly by augmenting the priority of their own
flows as long as they forward the traffics of their chil-
dren; thus avoiding starvation. For that aim, we de-
fine the priority assigner component which communi-
cates with the scheduler of the mesh BS in order to set
and update flows’ priority and we propose a linear ap-
proach and an exponential approach to deduce the pri-
ority level that should be assigned to a flow while up-
dating that value due to mobility. The rest of the paper
is organized as follows: first, we overview the state of
the art regarding scheduling in the IEEE 802.16e con-
text. We then detail our proposed scheme. Finally, we
evaluate the performances of our proposition.
2 RELATED WORK
The IEEE 802.16e amendments for the mesh mode
define two modes of scheduling known as centralized
scheduling and distributed scheduling, (IEEE, 2006).
Distributed scheduling is adopted when a Mesh Client
(MC) has data to be transmitted to a neighboring MC
managed by the same mesh BS. In this case, nodes ne-
gotiate the distribution of transmission opportunities
in a pairwise fashion by using a three-way-handshake.
First, an MC wishing to change the transmission op-
portunity allocation for one of its connections should
send a request for transmission opportunities to its
neighbors using a Mesh Distributed Schedule (MSH-
DSCH) packet. One or more of the neighbor corre-
spond with a range of available transmission oppor-
tunities. The MC chooses a subset of available trans-
1
In fact, we find that our approach is easily applied to
the new standard IEEE802.16j as the multihop relay mode
reduces the complexity of the mesh mode.
mission opportunities and acknowledges that it will
use them with a third MSH-DSCH packet. After the
execution of distributed scheduling, the mesh node
can transmit in the reserved timeslot without colli-
sion, (Ciao and al, 2005).
In the centralized scheduling, the mesh BS acts as
a scheduler and allocates transmission and reception
timeslots for each client station. First, a scheduling
tree rooted at the mesh BS is established. This tree
describes the routing path between each MC and the
mesh BS; its is also broadcasted to all MCs. Each
MC belongs to one tree layer and has a position num-
ber in that layer. The centralized scheduling operates
in two stages and the time period required to perform
both stages is known as the “scheduling period”. In
the first stage, the mesh BS collects the bandwidth re-
quests from all MCs. In the second stage, the mesh
BS allocates then distributes the transmission and re-
ception schedule to all MCs within the Mesh Cen-
tralized Schedule (MSH-CSCH) messages. Note that
the data subframe description belongs to a frame after
the frame that the grant is sent,(Kuran et al., 2006).
Moreover, in centralized scheduling, the mobile MSS
needs to send one bandwidth request for each link
it has with the neighboring stations and all the re-
quests belonging to that MSS is sent within a unique
MSH-CSCH message, (IEEE, 2006). The grant sent
in the MSH-CSCH message indicates the amount of
data that a node can transmit independently with the
QoS requirements of the transmitted flows.
Many centralized scheduling techniques for the
mesh WiMAX networks have been proposed. Those
may be without spatial reuse or with spatial reuse.
Spatial reuse enables the scheduler to assign the same
slot to non interfering links. The proposed techniques
also differ in whether they provide QoS guarantees
or not, consider fairness or not and suggest routing
schemes or not. For instance, authors in (Shetiya
and Sharma, 2005) propose routing and centralized
scheduling algorithms that guarantee per-flow QoS
requirements to real-time and interactive data applica-
tions. More precisely, they separately schedule UDP
and TCP connections and compute the number of
slots required per flow along the path and at each node
per frame while assuming an OFDM-based physical
layer. The number of slots is computed with regard to
the flow characteristics such as the end-to-end packet
drop probability. Once the mesh BS assigns the com-
puted number of slots to the nodes, the nodes provide
the required slots to its different queues in a weighted
round robin manner. For TCP traffics, slot allocation
is proportionally fair to the minimum bandwidth re-
quirements of the nodes.
In (Mai et al., 2009), authors designed a special
WINSYS 2010 - International Conference on Wireless Information Networks and Systems
6

bandwidth requests for UGS traffic while adding the
weight of delay when scheduling different Subscriber
Stations (SS) with the same service type. More pre-
cisely, authors in (Mai et al., 2009) propose an Ex-
pedited Queue (EQ) scheduling scheme which con-
siders both per-hop BW-REQ and end-to-end route
path in order to provide absolute QoS guarantees for
UGS traffic. When the sender SS of UGS traffic re-
quests BW-Req, the BS assigns the slots based on
the requested slots and the number of hops within the
route path; thus reducing overhead and end-to-end de-
lays. Moreover, authors in (Mai et al., 2009) assign
to SSs within the same service type but with higher
load higher priorities. They also reduce the access de-
lay of real-time flows including UGS ones by giving
higher priorities to data frames that have been wait-
ing a longer time in the queue. Nevertheless, they
do not differentiate between the SS’s own traffic or
the SS’s children traffic. The performance of the pro-
posed techniques is evaluated by considering the aver-
age delay and the delay variation (ms) versus the flow
data rate of total input traffic (Mbps).
In (Ghosh et al., 2008), authors survey multiple
centralized scheduling techniques for the mesh and
the PMP modes. Some interesting ideas may be high-
lighted such as ordering the assigned slots to reduce
jitter, ranking links based on their satisfaction with the
schedule in the previous iteration (satisfaction s = rate
achieved with the previous schedule / required band-
width of the link), scheduling flows based on a prior-
ity value proportional to the node’s load and through-
put requirements or scheduling the flows while re-
specting the fairness constraint or the transmission
power constraint. Moreover, authors of (Ghosh et al.,
2007) define a metric called “Schedule Efficiency” as
the proportion of the weighted measure of the admit-
ted flows to the weighted measure of all flows seek-
ing admission in order to compare the performance of
their scheduling algorithm to other scheduling tech-
niques.
Authors of (Belghith and Nuaymi, 2008) com-
pare five scheduling algorithms which are the Round
Robin (RR), the maximum Signal-to-Interference Ra-
tion (mSIR), the Weighted RR, the combination of
the Temporary Removal Scheduler (TRS) and the RR
(TRS+RR) and the combination of the Temporary Re-
moval Scheduler and the mSIR (TRS+mSIR) by con-
sidering the number of delivered data packets versus
traffic load, the number of the served SSs per frame
versus traffic load. They also compared their pro-
posed technique called modified maximum Signal-to-
Interference Ration (mmSIR) and the original mSIR
by considering the mean sojourn time versus the traf-
fic load. Nevertheless, the considered algorithms are
mainly designed for the PMP mode of WiMAX.
Authors of (Kuran et al., 2006) propose a Service
Adaptive QoS (SAQoS) approach in which the mesh
BS assigns five virtual node IDentifiers (node IDs) in-
stead of one to each MSS. The virtual nodes IDs rep-
resent the five scheduling classes of the IEEE 802.16e
standard and each of these virtual nodes requests
bandwidth individually according to its requirements.
Consequently, the mesh BS will handle the received
requests independently. As in mesh mode, a separate
request must be sent to the MBS for each hop, authors
of (Kuran et al., 2006) order their mesh BS to allocate
the same amount of bandwidth to each link the traf-
fic uses to reach the mesh BS and the same allocation
differentiation is valid for downlink traffic to MSSs
with hop count more than one. Authors of (Kuran
et al., 2006) also propose a Fair Adaptive Base Station
Scheduler (FABS) that bases its scheduling decisions
on each MSS’s current request and the grants given
to all MSSs in the network. In (Mogre et al., 2008),
authors jointly optimize the routing, scheduling and
bandwidth savings within the IEEE 802.16 context
using network coding while reducing the computa-
tional costs.
The stated scheduling methods are highlighted
and compared to our proposed method in the table 1.
3 PROPOSED SCHEME
3.1 Problematics, Assumptions and
Goals
The IEEE 802.16e mesh mode have several charac-
teristics that render complex the QoS provision. First,
each MSS not only transmits its own traffic flows but
also forwards the traffic flows of its children. There-
fore, the flows owned by the forwarding MSS may
experience starvation as the available bandwidth on
the links is shared between all forwarded traffics.
Besides, a MSS may act selfishly to benefit from
the available bandwidth. Meanwhile, when a MSS
moves, all the flows that were managed by it need
to be re-routed, re-admitted and re-scheduling while
compensating the induced processing delays in order
to meet the original QoS requirements. Particularly,
the priority assigned to the affected flows needs to
be dynamically adjusted while the uplink scheduling
needs to be dynamically revised in order to optimize
the delays spent in the queues while meeting the QoS
requirements despite mobility.
Our proposed scheme adopts the idea of the five
virtual nodes ID assigned to each MSS, (Kuran et al.,
QoS SCHEDULING FOR IEEE 802.16e MESH MODE USING GENETIC ALGORITHMS
7
Table 1: Comparing some scheduling techniques.
Scheduling Method Scheduling Policy Priority Policy Layer of
scheduling
Implementation
Performance criteria
addressed
Mobility
Involvement
Routing and
scheduling for IEEE
802.16d mesh mode
(Shetiya and
Sharma, 2005)
Centralized scheduling
for real-time and non
real-time flows
-Traffic based: priority to UDP
traffic over TCP traffic
-Does not treat selfish behavior and
starvation issues
Physical:
calculates the
number of slots
to be allocated
-Average bandwidth
provided for each
flow versus required
average bandwidth
No mobility
considerations
Combined
scheduling QoS
framework for IEEE
mesh mode (Mai
et al., 2009)
Combines centralized
scheduling and distributed
scheduling
-Within the same service type, the
SS with higher load has higher
priority
-Traffic based: Highest priority for
UGS traffic
-Higher priority is given to real-time
data-frames that waited a longer
time in the queue
Cross layer
approach
involving the
MAC layer and
the IP layer
-Average delay and
delay variation (ms)
versus the flow data
rate of total input
traffic (Mbps)
No mobility
considerations
Enhancement of of
the maximum
Signal-to-
Interference Ratio
(mSIR)(Belghith and
Nuaymi, 2008)
Schedules rtPS flows for
the Point to Multi-Point
(PMP) mode
If it does not serve an SS having
unicast request opportunities, it
gives priority to other SSs having
higher SIR
Physical:
involving the
quality of the
link
Mean sojourn time
versus traffic load
No mobility
considerations
Service Adaptive
QoS approach
(Kuran et al., 2006)
-Assigns 5 virtual node
identifiers for each QoS
class
- Proposes a BS scheduler
for the centralized
scheduling of the mesh
mode
Not addressed Physical: grants
bandwidth to
links
- Service delays of 5
flows of involved
SSs
Partially
considered
Our method Minimizes the sojourn
time in the queue using
genetic algorithms for
rtPS traffic
- Traffic based and history based:
Own rtPS flows’ priority depends on
the amount of children’s forwarded
traffic
-Addresses selfishness and
starvation
- The flow’s priority is incremented
when the managing node leaves the
route due to mobility
MAC layer:
adds a new set
of functions
-Number of rescued
flows in each round
-Number of genomes
that persist until the
last round
-Delay is reduced
since waiting time is
optimized
Flows affected
by mobility are
rescued and
their QoS
constraints are
revised in order
to meet the
original QoS
requirements
2006), and considers the rtPS traffic class. Each rtPS
flow is characterized by its minimum reserved traffic
rate (bits/s), its maximum sustained traffic rate called
also peak rate (bits/s), its maximum latency (s), and
its priority, (IEEE, 2006). According to the mobile
WiMAX specifications, rtPS flows are generated by
the third class of applications that includes streaming
media, (Forum, 2006). Guidelines specify bandwidth
values ranging between 5 kbits/s and 2 Mbits/s while
latency values are not specified, (Forum, 2006). Pri-
ority ranges between 0 to 7 where higher numbers in-
dicate higher priority, (IEEE, 2006). rtPS flows that
we consider in our scheme have a size ranging from
20 Mbits to 340 Mbits, a minimum reserved traffic
rate raging between 500 kbits/s and 2 Mbits/s, a maxi-
mum sustained traffic rate ranging from 500 kbits/s to
2 Mbits/s and a maximum latency value of 680 sec-
onds. We also assume that a route has always been
established to the mesh BS so that intermediate MSSs
are known to the source and that every intermediate
MSS issues its own request in order to forward the
correspondent flow. We also assume that the origi-
nal QoS values are set by the source and are integrity
protected. Besides, each intermediate MSS should
update the maximum latency value (i.e., the updated
value is specified in a different field) when issuing its
request while taking into consideration the time spent
by the flow before reaching that MSS; the updated
value should always be smaller than the original one.
Our proposed scheme intends to schedule the up-
link transmission of rtPS traffic while a priority will
be set for every flow in order to encourage the MSS
forwarding the traffic of their children. That prior-
ity value is managed by a new component that we
call “Priority Assigner” which communicates with
the scheduler of the mesh BS. We intend to optimize
the time spent by a flow in the queue while respecting
the flow’s QoS requirements. We adopt the Genetic
WINSYS 2010 - International Conference on Wireless Information Networks and Systems
8

Algorithms concept in order to solve the scheduling
problem.
3.2 Priority Assignment
We define the Priority Assigner component at the
mesh BS level as depicted by Figure 1. The sending
MSS generates a rtPS transmission request while
indicating the minimum reserved traffic rate, the max-
imum sustained traffic rate and the maximum latency
values without specifying a priority value. The Prior-
ity Assigner component will get the request and up-
date it by setting the priority value depending on the
history of the issuer. More precisely, the Priority As-
signer component maintains a table with these entries
(NID, T
0
, Amounto f ForwardedTra f f ic, Priority)
where NID refers to the issuer’s node Identifier,
T
0
refers to the instant when the issuer has entered
under the coverage of the managing mesh BS and
Amounto f ForwardedTra f f ic refers to the amount
of the traffic that the issuer has forwarded so far
for its children. The Priority Assigner component
assigns a priority value to the issuing MSS which is
computed by the following
amounto f ForwardedTra f f ic
t − T
0
(1)
then adjusted to be in the interval [0,7] depending on
8 thresholds to be defined in order to cope with the
standard amendments. The priority value of that MSS
is then communicated to the scheduler so that it can
update the priority of the rtPS flow lastly generated by
that MSS then schedule it with regard to the assigned
value.
Figure 1: The priority assigner interactions.
Note that when the mesh BS scheduler schedules
the transmission of a flow (identified by a CID) by a
MSS (identified by a NID) and that flow is not the own
flow of the forwarding MSS, the scheduler communi-
cates with the Priority Assigner component to update
the Amounto f ForwardedTra f f ic value. When one
flow is affected by the mobility of an intermediate
node on the route, the priority of that flow is incre-
mented independently of its issuer.
Mobile WiMAX parameters are stated in (Forum,
2006). For instance, the mobile nodes can have a
speed reaching 120 km/h. Moreover, the distance be-
tween two BSs is about 2.8 km. That means that a mo-
bile WiMAX node moving at 120 km/h needs 84 sec-
onds to cross the distance between two BSs. In order
to adjust the priority value to be in the interval [0,7],
we propose a linear approach and an exponential ap-
proach. Regarding the linear approach, we assume
that a mesh node may stay under the coverage of the
mesh BS for a certain period of time during which its
should transmit a certain amount of traffic for its chil-
dren in order to increase its own traffic’s priority. The
time and traffic size are augmented linearly by adding
chosen values and the obtained values are mapped to
8 levels of priority. The numerical scenario that we
propose assumes that after 85 seconds, the mesh node
should forward 85/2 Mbits for its children in order
to increase the priority of its own traffic by one. The
assigned priority values are given by the table 2. For
illustration purpose, when a node stays for 85 seconds
under the coverage of the same mesh BS and forwards
less than 42.5 Mega bits for all its children, indepen-
dently of their number, all the flows issued by that
node will have 0 as priority. When that node stays
100 seconds and forwards less than 85 Mega bits for
its children, the priority remains 0 but when the node
stays 100 seconds and forwards between from 42.5 to
85 Mega bits, the priority is set to 1.
Table 2: Priority assignment in case of a linear approach.
Amounto f Forwarded
Tra f f ic(Mega bits)
thet − T
0
(seconds)
Assigned
Priority
340 680 7
297.5 595 6
255 510 5
212.5 425 4
170 340 3
127.5 255 2
85 170 1
42.5 85 0
Regarding the exponential approach, we assume
that a mobile mesh node which transmits less than
42.5 Mega bits for its children during 85 seconds im-
plies that its own flows will be assigned 0 as prior-
ity. These forwarded traffic and time values will be
doubled in order to increase the assigned priority as
depicted by the table 3.
We also define the “Integrity Verifier” component
shown by the Figure 1 which role is to verify whether
a request is issued by its owner or by an intermediate
MSS on the route. The CID of a request that is not
QoS SCHEDULING FOR IEEE 802.16e MESH MODE USING GENETIC ALGORITHMS
9
Table 3: Priority assignment in case of an exponential ap-
proach.
Amounto f Forwarded
Tra f f ic(Mega bits)
thet − T
0
(seconds)
Assigned
Priority
5440 10880 7
2720 5440 6
1360 2720 5
680 1360 4
340 680 3
170 340 2
85 170 1
42.5 85 0
issued by the owner of the flow along with the node
ID of the forwarding node are communicated to the
scheduler so that the latter can update the correspon-
dent Amounto f ForwardedTra f f ic value.
3.3 Genome Modeling, Fitness,
Mutation and Cross-over
We model a genome as a list of flows. Each flow is
characterized by its size, its minimum reserved traffic
rate, its maximum sustained traffic rate, its maximum
latency, its priority value and the delay that the flow
spends in the queue before being scheduled for trans-
mission d
CID,NID
. We assume that we have N flows
to be scheduled and we use the Genetic Algorithms
concept to minimize the delay that a flow spends in
the queue before being scheduled for transmission.
We calculate the fitness of a genome by
∑
d
CID,NID
(2)
and we define the optimal genome among M ones as
the one having
Min
M
(
∑
N
i=1
d
CID,NID
)
and we intend to optimize
d
CID,NID
= T
s
− T
e
(3)
where T
s
is the instant at which the request is served
and T
e
is the instant at which the request was issued
subject to constraints:
maximumSustainedRate < available BW
and
MinimumReservedRate < available BW
We always verify that
d
CID,NID
< ML − λ
where λ is the maximum propagation delay needed
for the node to receive the schedule then transmit the
flow till the mesh BS.
When a MSS leaves the network, its own flows
are no longer scheduled for uplink while the flows of
its children should be rescued by neighboring MSSs.
Rescuing a flow by a neighboring MSS induces a de-
lay that should be taken into consideration when the
rescuing MSS issues an uplink transmission request
regarding that flow. Therefore, the rescuing MSS
should decrement the ML value and increment the
priority of the rescued flow. The mutation operator
reflects the mobility of MSSs. More precisely, the
mobility of a MC implies
T
sMSS
= ∞,T
s j
= T
s j
− 10 (4)
(where j is the index of a child of the quitting MSS)
and
p
j
= p
j
+ 1 (5)
(where p is the priority and j is the index of a child
of the quitting MSS). The number of chromosomes of
an individual is given by the Formula
Total BW o f meshBS
minimal BW required bya f low
(6)
4 PERFORMANCE EVALUATION
We implemented our scheduling genetic algorithm
by generating a 500 genomes population where each
genome is composed by 250 flows and a fitness. Ev-
ery node has 5 parent nodes and and each parent node
ID is comprised between 1 and 25. In every round
of the algorithm, the cross-over procedure is applied
followed by the mutation procedure which randomly
affects 100 genomes. The mutation consists in elimi-
nating 100 nodes of the mutant genomes; that is 100
nodes quit the network due to mobility. The 100
eliminated nodes are randomly chosen and their flows
have a T
s
value equal to 999999 which is the synonym
for an infinite value. After that, the resulting new pop-
ulation is sorted in order to keep the best 500 genomes
having the best 500 fitness values. The pre-described
round is executed 100 times and for each round we
keep the fitness of the best genome in population. It
is worth noticing that an arbitrary number of simula-
tions may be considered as we need just to launch the
genetic algorithm. However, we opted for consider-
ing three simulations only as we have noticed that the
difference between the obtained curves is tiny and in
order of 1.25%. This means that even if we launch
a greater number of executions, the obtained results
will be similar and that the conclusions that we can
have in the light of three simulations are relevant.
The results obtained after executing the genetic al-
gorithm while adopting the numerical scenario stated
WINSYS 2010 - International Conference on Wireless Information Networks and Systems
10

in 3.2 are plotted in the Figures 2 and 3 below. We
may notice that the genetic algorithm converges after
maximum 10 executions when assigning the priority
of the flows using the linear approach as depicted by
Figure 2. When adopting the exponential approach,
the algorithm converges also after maximum 10 exe-
cutions as depicted by Figure 3. Note that the chosen
numerical scenario fixing the maximum latency, the
minimum reserved traffic rate and the size of the for-
warded traffic values influences the number of rounds
needed for convergence. However, that number has
not exceeded 20 rounds for more than 10 different nu-
merical scenarios that we probed. Note also that we
have tried other numerical scenarios and we obtained
curves having nearly the same shape with a rapid con-
vergence. We think that the rapid convergence of the
genetic algorithm is mainly due to the fact that we
perform multiple verifications on the generated flows
and we state conditions on the values characterizing
the scheduled flows. We also conclude that the fitness
values of the genomes in both Figures 2 and 3 are very
close and that they converge to nearly the same value.
Figure 2: Execution of the genetic algorithm when adopting
the linear approach.
Figure 3: Execution of the genetic algorithm when adopting
the exponential approach.
In order to evaluate the performances of our
scheduling technique, it is interesting to evaluate the
number of rescued flows in each round, that is those
affected by mobility, and to consider the number of
initial genomes that persist until the last round. We
notice that the number of rescued flows when adopt-
ing the linear approach is very reduced in the first 10
rounds as depicted by Figure 4, then it raises exponen-
tially until the 23
th
round, after that it converges after
the 45
th
round. This behavior persists when adopt-
ing the exponential approach as depicted by Figure 5.
However, the number of rescued flows stabilizes after
the 38
th
round in this case. We notice that adopting ei-
ther the linear or the exponential approach for the pri-
ority assignment does not seriously affect the number
of rescued flows; nevertheless, the convergence is ob-
tained rapidly with the exponential approach. More-
over, we conclude that after a particular x number
of rounds, which is also equivalent to executing the
mutation function on 100 ∗ x genomes of the retained
population, it becomes difficult to rescue more flows
while respecting their QoS constraints. This conclu-
sion is relevant even after only three simulations for
the same reasons stated earlier.
Figure 4: Number of rescued flows in each round when
adopting the linear approach.
Regarding the number of persistent genomes, we
notice that after 6 to 8 rounds, it becomes null whether
we adopt the linear approach or the exponential ap-
proach as depicted by Figures 6 and 7. This means
that the genetic algorithm rapidly produces better
genomes and that it completely renews the population
leading to the creation of a better scheduling scheme
that optimizes the sojourn time of the rtPS flows. The
obtained results regarding the number of persistent
genomes confirm the rapid convergence of the algo-
rithm.
QoS SCHEDULING FOR IEEE 802.16e MESH MODE USING GENETIC ALGORITHMS
11
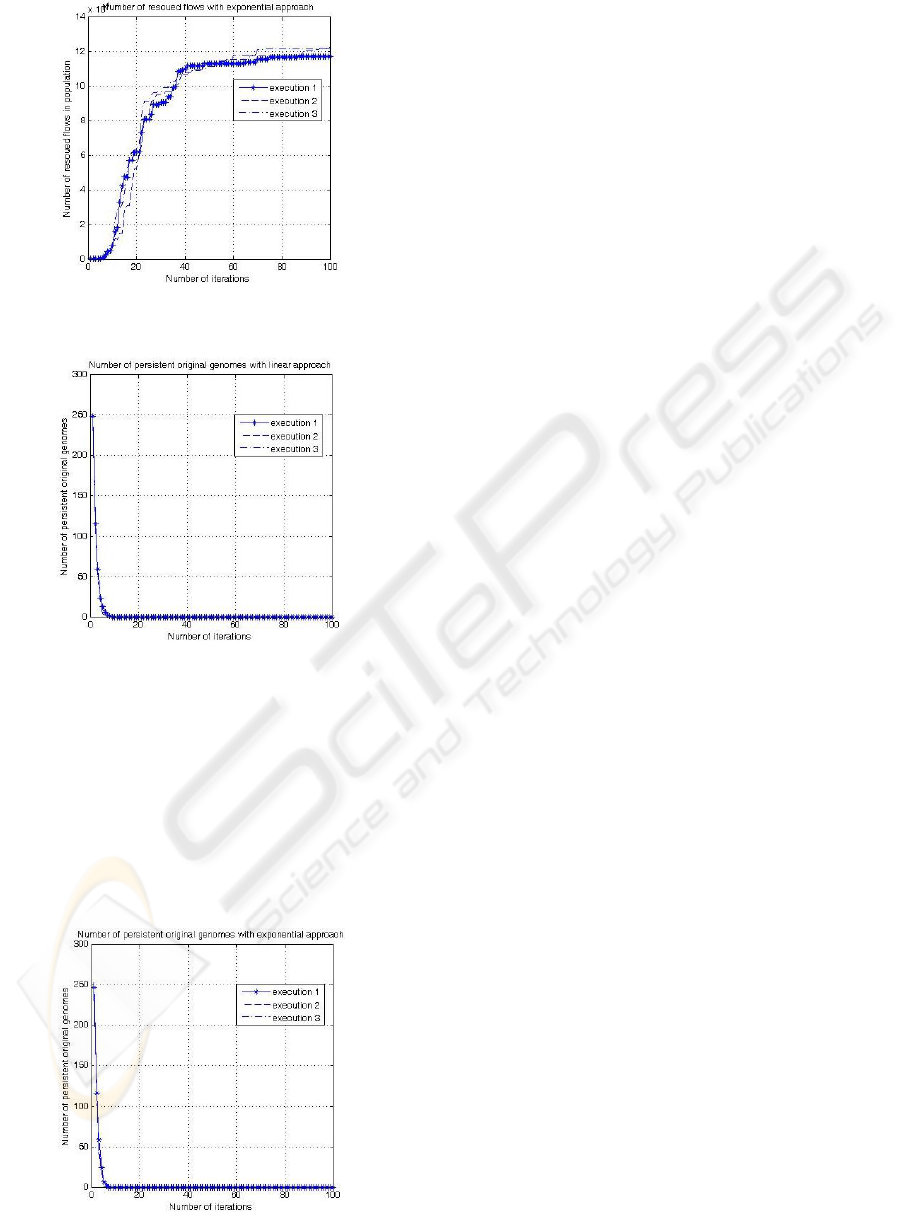
Figure 5: Number of rescued flows in each round when
adopting the exponential approach.
Figure 6: Number of persistent genomes in each round
when adopting the linear approach.
5 CONCLUSIONS
In this paper, we addressed the scheduling problem of
the rtPS flows within the IEEE 802.16e mesh context
while minimizing the sojourn time of such flows in
the queues; thus leading to a reduction in the transmis-
sion delays and to a better QoS provision. To that aim,
Figure 7: Number of persistent genomes in each round
when adopting the exponential approach.
we built an ad hoc genetic algorithm and we showed,
through the simulations, that our genetic algorithm
converges rapidly. In other words, we rapidly reach
an optimized scheduling scheme that minimizes the
transmission delays of rtPS flows. Moreover, we pro-
posed a novel scheme for assigning priorities to the
transmitted flows then dynamically updating such val-
ues in case of mobility in order to encourage the mesh
nodes forwarding the traffic of their children while fa-
voring flows that need to be rescued when the manag-
ing parent node quits the network. That scheme may
adopt a linear approach or a linear approach which
both lead to comparable performances. The results
provided in this paper are encouraging; therefore we
plan to further analyze the performance in the network
by adapting additional metrics and we also plan to in-
vestigate the effects of mobility independently from
the effects of the prioritization scheme.
REFERENCES
Belghith, A. and Nuaymi, L. (2008). Comparison of wimax
scheduling algorithms and proposal for the rtps qos
class. Technical report, TELECOM Bretagne.
Ciao, M. and al (2005). Modeling and performance analysis
of the distributed scheduler in ieee 802.16 mesh mode.
In MobiHoc’05, Urbana-Champaign, Illinois, USA.
Forum, W. (2006). Mobile wimax- part i: A technical
overview and performance evaluation. Technical re-
port, Wimax Forum.
Ghosh, D., Gupta, A., and Mohapatra, P. (2007). Admission
control and interference-aware scheduling in multi-
hop wimax networks. In IEEE MASS.
Ghosh, D., Gupta, A., and Mohapatra, P. (2008). Schedul-
ing in multihop wimax networks. Mobile Computing
and Communication Review, 12(2).
IEEE (2006). Ieee standard for local and metropolitan area
networks part 16: Air interface for fixed and mo-
bile broadband wireless access systems amendment 2:
Physical and medium access control layers for com-
bined fixed and mobile operation in licensed bands
and corrigenda 1. IEEE.
Kuran, M. S., Y1lmaz, H. B., Alagz, F., and Tucu, T.
(2006). Quality of service in mesh mode ieee 802.16
networks. In International Conference on Software in
Telecommunications and Computer Networks, pages
107–111, Split-Dubrovnik, Croatia.
Mai, Y.-T., C-C.Yang, and Wen, C.-J. (2009). A new cut-
through mechanism in ieee 802.16 networks. In World
Academy of Science, Engineering and Technology.
Mogre, S., D’Heureuse, P., Hollick, N., and Steinmetz, M.
(2008). Core: Centrally optimized routing extensions
for the ieee 802.16 mesh mode. In 33rd IEEE Confer-
ence on Local Computer Networks.
Shetiya, H. and Sharma, V. (2005). Algorithms for rout-
ing and centralized scheduling to provide qos in ieee
802.16 mesh networks. In WMuNeP.
WINSYS 2010 - International Conference on Wireless Information Networks and Systems
12
