
A ROBUST MOSAICING METHOD FOR ROBOTIC ASSISTED
MINIMALLY INVASIVE SURGERY
Mingxing Hu, David J. Hawkes
Centre for Medical Image Computing, University College London, London, U.K.
Graeme P. Penney
Department of Imaging Sciences, King’s College London, U.K.
Daniel Rueckert, Philip J. Edwards, Fernando Bello, Michael Figl
Department of Computing, Imperial College, London, U.K.
Roberto Casula
Cardiothoracic Surgery, St. Mary’s Hospital, London, U.K.
Keywords: Video Mosaicing, Robotic Assisted Minimally Invasive Surgery, Homography, Trifocal Tensor, Bundle
Adjustment.
Abstract: Constructing a mosaicing image with broader field-of-view has become an interesting topic in image guided
diagnosis and treatment. In this paper, we present a robust method for video mosaicing in order to provide
more guiding information for robotic assisted minimally invasive surgery. Outliers involved in the feature
dataset are removed using trifocal constraints, homographies between images are estimated with
L -norm
optimization and chained together in a practical way. Finally refinement based on bundle adjustment is
applied to minimize the error between reprojection and feature measurement. The proposed method has
been tested with endoscopic images from Totally Endoscopic Coronary Artery Bypass (TECAB) surgery.
The results showed our method performs better than other typical methods in terms of accuracy and
robustness to deformation.
1 INTRODUCTION
The past decade has witnessed significant advances
on robotic assisted Minimally Invasive Surgery
(MIS) evolving from early laboratory experiments to
an indispensable tool for many surgeries. MIS offers
great benefits to patients: the incisions and trauma
are reduced and hospitalisation time is shorter.
Robotic assisted techniques further enhance the
manual dexterity of the surgeon and enable him to
concentrate on the surgical procedure. Despite of all
these advantages, MIS using an endoscope still
suffers from a fundamental problem: the narrow
field-of-view. As a result, the restricted vision
impedes the surgeon’s ability to collect visual
information from the scenes and his/her awareness
of peripheral sites.
A straightforward solution to overcome the
difficulty is video mosaicing, creating a 2D image
with wider field-of-view by aligning and properly
blending a number of partly overlapped images
acquired at different positions. A lot of research
work about video mosaicing has been done in both
computer vision and medical imaging communities.
1n 1975, Milgram (Milgram, 1975) proposed the
first photomosaics method by minimizing the visual
impact of the introduced seam. Geometric and
greyscale information was used to combine the
images on a line-by-line basis and to choose a best
seam point for each line. After that, this area has
attracted great attention from researchers in
206
Hu M., Hawkes D., Penney G., Rueckert D., Edwards P., Bello F., Figl M. and Casula R. (2010).
A ROBUST MOSAICING METHOD FOR ROBOTIC ASSISTED MINIMALLY INVASIVE SURGERY.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 206-211
DOI: 10.5220/0002928902060211
Copyright
c
SciTePress

computer vision community. For example, Zoghlami
et al. (Zoghlami et al., 1997) proposed a
feature-based algorithm to compute the homography
between images with relatively small overlap and
experimental results showed that it could deal with
large rotation around optical axis and zooming factor.
Alternatively, Capel (Capel, 2001) focused on the
global registration for the video mosaicing, the
alignment of the image frames, taking into account
all the overlapped images, and not just the
consecutive ones. Maximum likelihood estimate was
used to build the chain of consisted homographies
using all the available feature points. Most recently,
Brown and Lowe (Brown and Lowe, 2007)
introduced an automatic mosaicing method based on
the invariance features. The features are detected
and matched together between images using SIFT
(Lowe, 2004). This method is robust to orientation,
scale and illumination of the input images and can
recognize multiple panoramas in an unordered
image dataset. These methods work well for static
scene without any deformable objects in it. However,
medical image usually involves some deformation
from organs and soft tissues, which often lead to the
failure of these methods.
In medical imaging community, Seshamani et al.
(Seshamani et al., 2006) presented an endoscopic
mosaicing technique to display a wider field-of-view
of the surgical scene by stitching together images.
This method, which was evaluated using
microscopic retinal and catadioptric endometrial
images, can perform online image registration and
provide warping models to handle tubular organ
structure. Vercauteren et al. (Vercauteren et al., 2006)
also proposed a similar mosaicing method but they
applied statistics for Riemannian manifolds to
pairwise registration. Their method is able to
produce a globally consistent mapping of input
frames which is also aligned to a reference plane. It
also considers non-rigid deformations of soft tissue,
and the irregular sampling present in fibered
confocal microscopy. Recently Miranda-Luna et al.
(Miranda-Luna et al., 2008) also proposed a method
of mosaicing of bladder endoscopic images by
mutual information-based similarity measure and
stochastic gradient optimization. Besides, an
undistortion method is used to preprocess the
endoscopic images in order to improve the
robustness of the registration. Unfortunately, a
common trait shared by these methods is the
requirement of large overlap to guarantee the
convergence and accuracy of the local and global
alignment.
So in this paper, we propose a robust method to
mosaic medical images for robotic assisted
minimally invasive surgery. Good features are
detected and tracked based on the optical flow and
then the potential outliers are removed from the
feature dataset using the trifocal tensor.
Homographies between images are estimated using
Second-Order Cone Programming (SOCP) under
L
-norm. Then they are chained together under a
common and global reference system, followed by
bundle adjustment refinement to minimize the total
misalignment. The contributions of the proposed
method are as follows: (1) Mosaicing image with a
broader field-of-view can be constructed from the
input images containing deformable organs and soft
tissues. Thus it can be used for 2D-3D registration of
the anatomy to the preoperative CT/MRI data in
order to provide more information for image guided
diagnosis or surgery. (2) A robust strategy based on
the trifocal tensor and bundle adjustment is used to
remove outliers obtained from incorrect locations
and incorrect tracking and to obtain the global
alignment by minimizing the reprojection error.
2 ROBUST ESTIMATION FOR
VIDEO MOSAICING
Given a set of images
i
I
( mi , ,1 ), and some
image point
T
i
k
i
k
i
k
yx 1 , ,x detected on each frame
i
. If two images
i
I
and
j
I
can be related by a
linear transformation of the projective plane, we
have
jjii
xHx
,
(1)
where
H is a 33
matrix, representing the
2D-2D transformation via a projective plane, also
called a homography.
2.1 Feature Detection and Tracking
The first step to construct mosaicing image is to
track image features as the camera moves. One of
the well-known tracking methods is the
Lucas-Kanade (LK) tracker (Tomasi and Kanade,
1992). The LK tracker minimizes the sum of squared
errors between two images
k
I
and
1k
I
by
altering the warping parameters
p which are used
to warp
1k
I
to the coordinate frame of
k
I
. For a
general motion model with transformation function
px ,W , the objective function is
x
xppx
2
1
;min
kk
IWI
(2)
A ROBUST MOSAICING METHOD FOR ROBOTIC ASSISTED MINIMALLY INVASIVE SURGERY
207
This expression is linearized by a first order
Taylor expansion on
ppx
;
1
WI
k
x
x
p
px
2
11
;min
kkk
I
W
IWI
(3)
Where
1
k
I is the image gradient vector and
pW is the Jacobian of the transformation
function.
2.2 Outlier Removal
Usually there are some outliers in the feature dataset
after the detection and tracking, and they are in gross
disagreement with a specific postulated model and
must be handled by robust approaches. More
importantly, the
L optimization, which will be
discussed in the next section, is very vulnerable to
outliers. So the outlier removal is crucial to the
success of the whole mosaicing process.
Given three cameras characterized by projective
matrices
0IP , ][ VAP
, ][ VBP
, the
images of a 3D point in each view can be denoted as
T
yx 1 , ,x ,
T
yx 1 , ,
x ,
T
yx 1 , ,
x in
homogeneous coordinates. It can be noted that
matrices
A and B are 2D homograph matrices,
where Axx
and Bxx
, and V
and V
are
the projection of the first camera centre into the
second and third images. Then the trilinear
constraints across the three views can be compactly
expressed in terms of trifocal tensor,
jk
i
T , which is a
333 matrix with 27 entries. And the relation
xxx
can be described as (Shashua, 1995)
j
i
kk
i
jjk
i
avbvT
, 3 ,2 ,1 , , kji
(4)
Since every corresponding triplet
x ,
x
,
x
contributes four linearly independent equations, then
seven point correspondences uniquely determine (up
to scale) the tensor
T
. In fact the trifocal tensor can
be estimated from a minimum of six point
correspondences since it has only 18 degrees of
freedom. However, the six-point estimation involves
the solution of a cubic and a complicated
parameterization (Quan, 1994), and so for simplicity,
we use the seven-point method to compute a
possible solution and employ the RANSAC strategy
to detect the outliers based on the geometric error.
n
i
iiiiii
n
i
i
dddRR
1
222
1
ˆ
ˆ
ˆ
x,xx,xx,x
(5)
This error measures the sum-of-squares of the
geometric distances between the image points
iii
xxx
and the corrected data points
iii
xxx
ˆˆˆ
, with the latter obeying the trilinear
constraint Eq. (4) for the estimated tensor
T
. Thus,
given three images with overlap, we can estimate the
trifocal tensor among them and use the above error
measure to detect outliers accordingly.
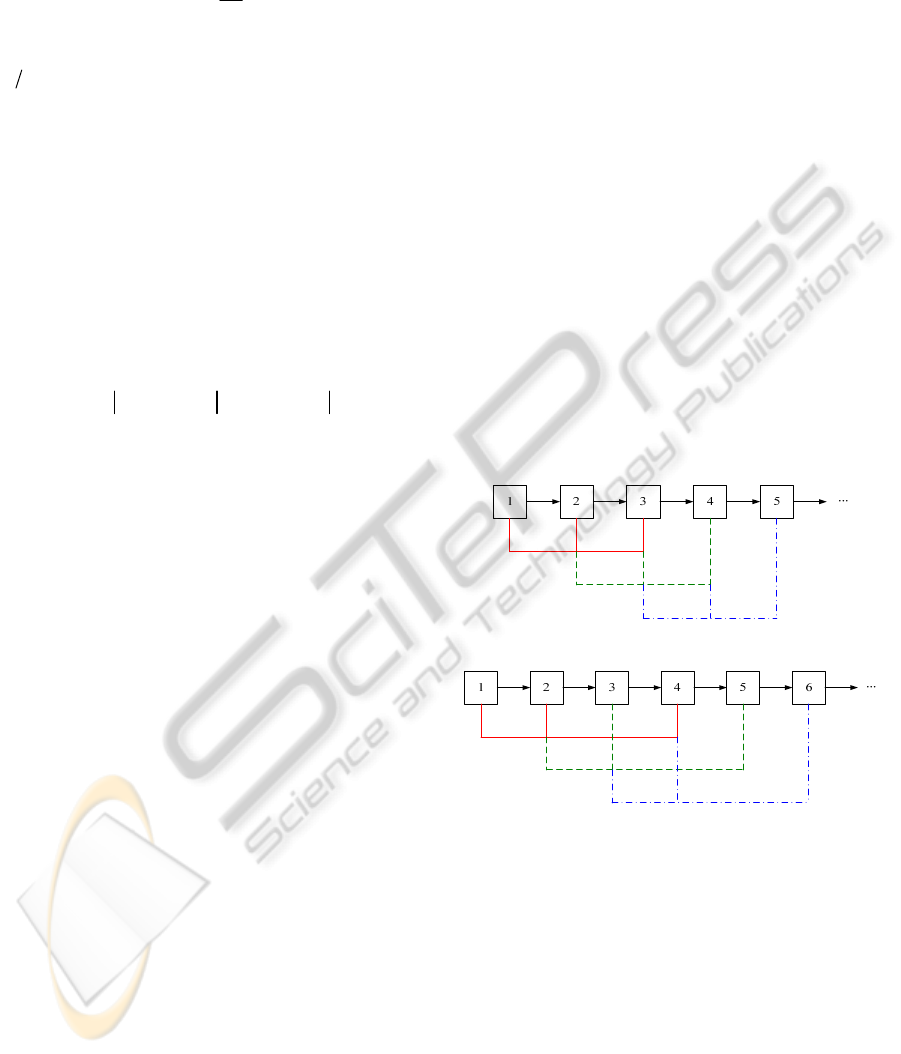
The above method is only applicable to three
images, we require a method to process an entire
image sequence and remove the outliers. The
simplest way is to compute the tensor among three
consecutive images,
2 ,1 ,
iii , e.g., image triplet,
3 ,2 ,1 ,
4 ,3 ,2 , etc, as shown in Fig.1 (a), and
delete feature points if they are considered an
outlier from any independent tensor estimation.
Besides, we also employ additional image triplets
for computation, e.g.,
3 ,1 , iii
, as shown in
Fig.1 (b). However, the more image triplets that are
used, the more feature points will be removed if a
previous decision rule is applied (e.g. once an outlier,
always an outlier). Our method carries out a number
of independent tests (each time using a unique
combination of three images) on each feature point.
Feature points are only removed if they are
determined to be outliers more than 50% of the
times.
3,2
1
T
4,3
2
T
5,4
3
T
(a)
4,2
1
T
5,3
2
T
6,4
3
T
(b)
Figure 1: Strategy of outlier removal based on trifocal
tensor. (a) The three consecutive images
2 ,1 ,
iii
are used to compute the trifocal tensor. (b) More nearby
images
3 ,1 ,
iii are used to remove the outliers from
the image sequence.
2.3 Image Alignment
Today
L
-norm optimization has been widely used
in various multiple-view geometry problems (Kahl
and Hartley, 2008). One of the main advantages of
L
is that: problems formulated by
L
often
possess a single, hence global, optimum. Besides, it
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
208

usually leads to a simpler formulation for the same
problem compared with
2
L
.
Without loss of generality, we set the last
element of the homography
H ,
33
h , to 1 and have
j
k
i
k
hh
hhh
hhh
xx
1
3231
232221
131211
So the residual of homography estimation between
image
i and
j
can be expressed as
s
ss
xh
xhhxhh
xh
xh
xh
xh
xx
k
kk
j
k
T
j
k
Ti
k
Tj
k
Ti
k
T
i
k
j
k
T
j
k
T
i
k
j
k
T
j
k
T
j
k
i
k
ffyx
yxd
2
2
2
1
3
2
32
2
31
3
2
3
1
,,
(6)
where
T
l
h represents the l -th row of the matrix
H
. So our aim is to solve the following optimization
problem by minimizing the residual
m
k
j
k
i
k
d
1
2
,min xx , s.t.
0s
k
Suppose each residual has an upper bound
k
, that
is,
kkkk
ff
22
2
2
1
sss . Then the
formulation in (6) is equivalent to
m
21
min
s.t.
22
2
2
1
sss
kkkk
ff
, mk , ,1
0s
k
Then we can use Second-Order Cone Programming
(Alizadeh and Goldfarb, 2003) to solve this problem.
Readers can refer to Kahl’s paper for more details
(Kahl and Hartley, 2008).
Ideally, after the alignment of all consecutive
images, we can chain all the images together and
wrap them onto a reference plane
r i
r i
r i
iiir
iiirir
if
if
if
,11,
,11,,
HH
HH
I
H
Here image
r
is the reference frame. For simplicity,
it can be the middle image of the whole video
sequence.
However, the misalignment error usually
accumulates by concatenating homographies. This is
especially evident when the camera goes back to the
scene previously seen in a long image sequence. The
accumulation of error may be so great that the first
and last images are very poorly registered. In other
words, the homographies are not consistent with
alignment to a common frame. So we use a strategy
to minimize the number of good homographies to
link image
i with reference frame
r
:
(1) Find image
j
, which is the furthest to image
r
but with enough overlap. Here the overlap
can be the number of feature correspondences
between image
j
and
r
overlap
rj
n
,
(2) Compute the homography between frame
k
and
i , and calculate the mean of the residual
error
k
j
k
i
k
rj
rj
d
n
D xx ,
1
,
,
(7)
(3) If
rj
D
,
is small enough,
residualrj
D
,
, this
homography
rj ,
H is accepted. Then we start
from image
j
,
j
r
, and find the next
acceptable homography
rj ,
H using step (1)
and (2). If
residualrj
D
,
, we select the image
next to
j
jrj
jrj
j
if 1
if 1
and repeat (2) and (3).
(4) The process will halt until the whole
homography chain is built.
Thus, alignment can take advantage of
homographies linking non-consecutive frames and
reduces the global registration error.
2.4 Refinement based on Bundle
Adjustment
The bundle adjustment (BA, Triggs et al., 1999) we
used is different from the ones addressed in
McLauchlan’s (McLauchlan, and Jaenicke, 2002)
and Brown’s paper (Brown and Lowe, 2007). In
their papers, BA was used to solve the rotation
parameters and focal lengths of all cameras. In this
paper, BA was performed to find the best
homography set
ri,
H , mi , ,1
, that minimize
the misalignment error.
ri
mi
r
k
rii
k
ri
,,1
2
,
~
min
,
xHx
H
(8)
where
r
x
~
is the reprojecion of all the feature points
onto frame
r
. It can be easily computed using Least
Square method with all the available homographies.
Then Levenberg–Marquardt algorithm is used to sol-
A ROBUST MOSAICING METHOD FOR ROBOTIC ASSISTED MINIMALLY INVASIVE SURGERY
209
(a) (b) (c)
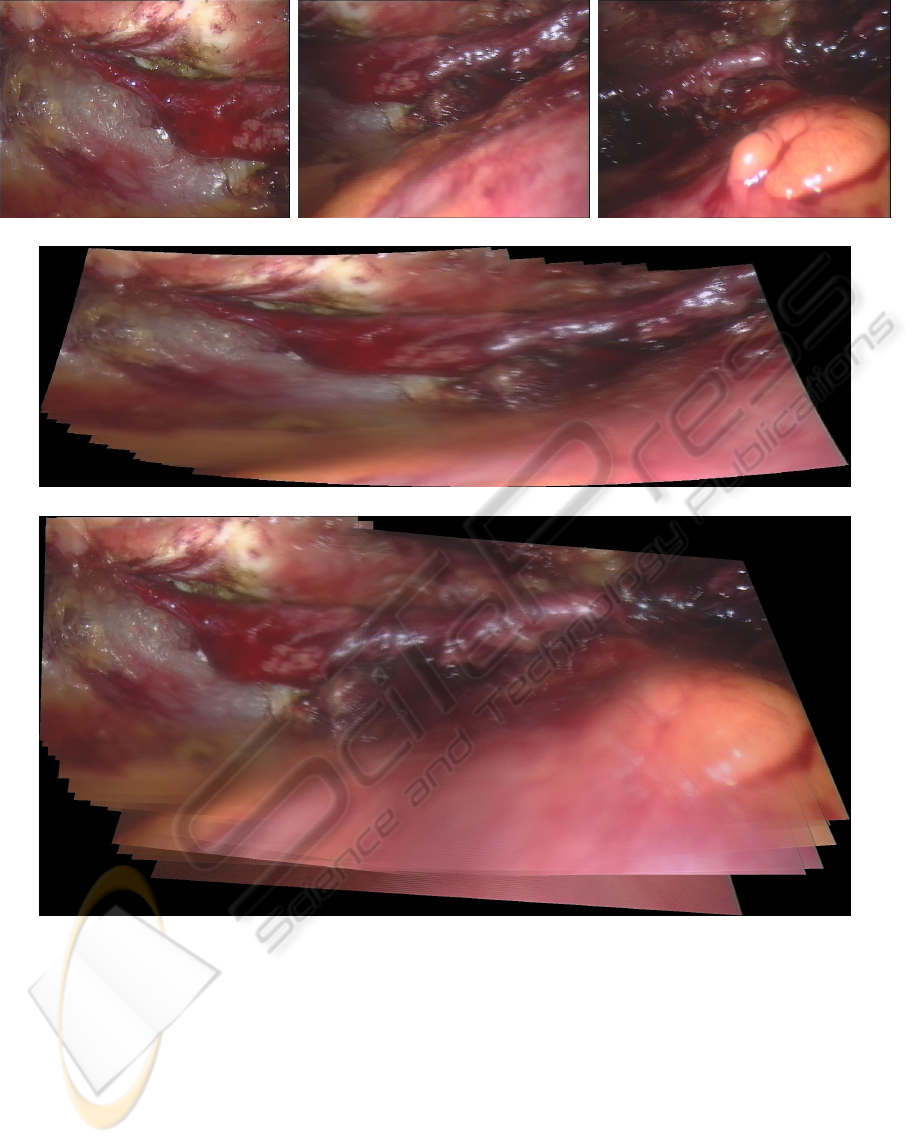
(d)
(e)
Figure 2: The experimental result of endoscopic images from Totally Endoscopic Coronary Artery Bypass surgery. (a), (b)
and (c) show the first, middle and last images of the sequence, respectively. (d) displays the mosaicing result of Brown’s
Method. (e) displays the mosaicing result of the proposed method.
ve Eq. (8). The C++ code about the generic sparse
bundle adjustment is available online by courtesy of
Manolis Lourakis.
3 EXPERIMENTAL RESULTS
In this section, the performance of the proposed
method was evaluated using endoscopic images
from Totally Endoscopic Coronary Artery Bypass
(TECAB) surgery and compared with Brown’s
method (Brown and Lowe, 2007).
The da Vinci
TM
robotic surgical system (Intuitive
Surgical, Inc., Sunnyvale, CA, USA) was used to
obtain images of the heart surface. The video
endoscopic images were digitized at 25 frames per
second (fps) using a frame grabber (LFG4 PCI64,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
210

Active Silicon, Uxbridge, U.K.). Although da Vinci
system provides stereo vision, we only use the image
sequence from left camera to perform the mosaicing
in order to compare with other methods. 150 images
were captured from the endoscope but we use only
30 frames (every 5 frame from the sequence) for the
mosaicing. Our aim is to create a mosaicing image
which includes the whole structure of the coronary
artery. The main challenge is the large complicated
non-rigid motion introduced by the beating heart
surface, which is shown in the right bottom of Fig. 2
(b) and (c).
Fig. 2 (d) displays the mosaicing result of the
proposed method. We can notice that the whole
vessel structure has been built correctly. So the
surgeon can realize the environment outside the
current scene when he views a part of the vessel.
More importantly, the mosaicing image can help him
link the endoscopic video with the preoperative
information from CT/MRI scan. Brown’s method
was also tested using this image sequence and the
mosaicing result was displayed in Fig. 2 (e). It is
noticed that only part (around three quarters) of the
whole vessel had been constructed and the images
affected badly by the beating heart surface could not
be used by Brown’s method. The possible reason is
that SIFT feature descriptor could not find enough
reliable features from the images with severe
deformation from the internal organ or soft tissue.
4 CONCLUSIONS
In this paper, we proposed a robust video mosaicing
method for robotic assisted minimally invasive
surgery. The mosaicing image displays a much wider
field-of-view of the operation scene and helps the
surgeon realize the surrounding environment outside
the current view. Experiments with TECAB
endoscopic images and FCM images show that the
proposed method performs better than other typical
methods. It is robust to deformation caused by
organs and soft tissues and can even deal with
artefacts involved in the images.
Effort in the near future will focus on future
improvement of robustness to deformation and
artefacts. Our long term goal is to automatically
construct mosaicing image of the surgical scene,
reconstruct the internal organ surfaces and register
these with the preoperative data (CT or MRI) to
provide more information for image guided
diagnosis and treatment.
REFERENCES
Alizadeh, F. and Goldfarb, D, 2003. Second-order cone
programming,
Mathematical Programming, 95 (1),
3-51.
Brown, M. and Lowe, D. G, 2007. Automatic Panoramic
Image Stitching using Invariant Features,
International Journal of Computer Vision, 74, 59–73.
Capel D. P. , 2001. Image Mosaicing and
Super-Resolution, Ph.D thesis, Dept. of Eng. Science,
Univ. of Oxford.
Kahl, F. and Hartley, R, 2008. Multiple-View Geometry
Under the Linfinity-Norm,
IEEE Trans. Pattern Anal.
Mach. Intell.
30(9): 1603-1617
Lowe, D. G., 2004: Distinctive Image Features from
Scale-Invariant Keypoints.
International Journal of
Computer Vision
, 60, 91–110.
McLauchlan, P. and Jaenicke, A, 2002. Image mosaicing
using sequential bundle adjustment.
Image and Vision
Computing
, 20(9–10):751–759.
Milgram D. L., 1975. Computer Methods for Creating
Photomosaics,
IEEE Trans. Computers, 24(11),
1113-1119.
Miranda-Luna, R., Daul, C., Blondel, W.C.P.M.,
Hernandez-Mier, Y., Wolf, D., Guillemin, F., 2008.
Mosaicing of Bladder Endoscopic Image Sequences:
Distortion Calibration and Registration Algorithm.
IEEE Trans. on Biomedical Engineering 55, 541–553.
Quan, L., 1994. Invariants of 6 points from 3 uncalibrated
images.
In: Proc. ECCV , 2, 459-470.
Shashua, A., 1995. Algebraic functions for recognition.
IEEE Trans. Pattern Analysis and Machine
Intelligence
, 17 (8), 779-789.
Seshamani, S., Lau W., and Hager, G., 2006. Real-Time
Endoscopic Mosaicking.
In: Proc. MICCAI, 355-363.
Tomasi, C., and Kanade, T., 1992. Shape and Motion from
Image Streams under Orthography: a Factorization
Method.
Int. J. Computer Vision, 9(2), 137-54.
Triggs, W., McLauchlan, P., Hartley, R., and Fitzgibbon,
A. 1999. Bundle adjustment: A modern synthesis.
In
Vision Algorithms: Theory and Practice
, number 1883
in LNCS. Springer-Verlag. Corfu, Greece, pp.
298–373.
Vercauteren, T., Perchant, A., Malandain, G., Pennec, X.,
Ayache, N., 2006. Robust mosaicing with correction
of motion distortions and tissue deformation for in
vivo fibered microscopy.
Medical Image Analysis, 10
(5), 673-692.
Zoghlami, I., Faugeras, O., and Deriche, R. 1997. Using
geometric corners to build a 2D mosaic from a set of
images. In Proc. CVPR, 420-425.
http://www.ics.forth.gr/~lourakis/sba/
A ROBUST MOSAICING METHOD FOR ROBOTIC ASSISTED MINIMALLY INVASIVE SURGERY
211
