
DYNAMIC MODELING OF A MOMENT EXCHANGE UNICYCLE
ROBOT
S. Langius
Department of Mechanical Engineering, University of Twente, Enschede, 7500 AE, The Netherlands
R. A. de Callafon
Department of Mechanical and Aerospace Engineering, UCSD, 9500 Gilman Drive, La Jolla, CA 92093-0411, U.S.A.
Keywords:
Unicycle, Robotics, Modeling.
Abstract:
In this paper a three dimensional non-linear model has been derived to describe the dynamics of an unstable
moment exchange unicycle robot. The robot uses a driving wheel to provide stabilization in longitudinal direc-
tion, while a second moment exchange wheel with a large inertia is used for stabilization in lateral direction.
For validation purposes, the resulting equations of motion are compared independently against the simulation
results of a finite element package called SPACAR. The model includes the coupling between the lateral and
longitudinal motion, which makes it possible to control the yaw angle and the model can be used to design a
stabilizing feedback controller.
1 INTRODUCTION
Using basic principles of kinematics and dynamics,
dynamic models of robotic systems can be derived in-
dependently by hand or by an automated computer
program to ensure cross model validity. This pa-
per illustrates this approach on an inherently unstable
Moment Exchange Unicycle Robot (MEUR) depicted
in Figure 1 that requires stabilization in both a lat-
eral and longitudinal direction. Using Newtonian me-
chanics and a finite element package called SPACAR,
three dimensional non-linear models that incorporates
the coupling between the lateral and longitudinal mo-
tion of the MEUR are derived. The resulting dynamic
model captures the dynamics of a wide variety of mo-
ment exchange unicycle robots and can be used to de-
sign stabilizing feedback control algorithms.
Earlier work on dynamic modeling of robotic uni-
cycles can be distinguished by their mechanism to
achieve lateral stabilization (van Pommeren, 2007).
An inertia wheel moving in the horizontal plane
for stabilization is used in many earlier applications
(Schoonwinkel, 1987; Vos and Flotow, 1990; Naveh
et al., 1999). This approach is comparable to the
twisting torso motion of a real unicyclist (Ohsaki
et al., 2008; Sheng and Yamafuji, 1997). The gyro-
scopic effect of two inertias spinning in opposite di-
rection in the horizontal plane is used in (Zenkov
et al., 1999). A pendulum movingin the vertical plane
perpendicular to that of the driving wheel is used in
(Dao and Liu, 2005) and an inverted pendulum in the
same plane is used in (Nakajima et al., 1997) where
lateral stabilization is further improved by a barrel
shaped wheel. The work of (Au and Xu, 1999) makes
use of the gyroscopic effect for stabilization.
inertia wheel
@
@
body
driving wheel
Figure 1: Schematic drawing of a Moment Exchange Uni-
cycle Robot (MEUR).
The three dimensional model of the MEUR de-
rived in this paper includes the coupling between the
lateral and longitudinal motion, which makes it pos-
sible to control the yaw angle similar as in (Majima
et al., 2006). For validation purposes of the dy-
namic model, the simulation results obtained from
the equations of motion are compared independently
216
Langius S. and A. de Callafon R. (2010).
DYNAMIC MODELING OF A MOMENT EXCHANGE UNICYCLE ROBOT.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 216-221
DOI: 10.5220/0002938402160221
Copyright
c
SciTePress

against the simulation results of a finite element pack-
age called SPACAR (Aarts et al., 2008).
2 EQUATIONS OF MOTION
2.1 Model Structure and Orientation
The configuration and position of the the MEUR in
Figure 1 can be described by six independent coor-
dinates displayed in Table 1. The six coordinates do
not include the pitch angle of the inertia wheel, as we
assume that the inertia wheel is simply replaced by
a moment acting on the body. This is a simplifica-
tion of the problem, discarding the quadratic velocity
terms caused by the (small) pitch velocity of the in-
ertia wheel. Figure 2 shows all the transformations
needed to apply Newtonian mechanics, where Table
2 describes all the coordinate systems involved.
Table 1: Definition of independent coordinates.
description applies to axis
ψ Yaw angle wheel & body a
3
γ Roll angle wheel & body b
1
ϕ Body pitch angle wheel & body c
2
θ Wheel pitch angle wheel d
2
X x-position point Q wheel & body a
1
Y y-position point Q wheel & body a
2
ψ
γ
ϕ θ
b
2
b
3
b
1
c
2
c
3
c
1
d
2
d
3
d
1
e
2
e
3
e
1
A to B B to C C to D D to E
Figure 2: All coordinate system transformations.
Table 2: Definition of the coordinate systems (CS).
CS description unit vectors
A Inertial CS a
1
, a
2
, a
3
B Contact force CS b
1
, b
2
, b
3
C No-slip constraint CS c
1
, c
2
, c
3
D Body CS d
1
, d
2
, d
3
E Wheel CS e
1
, e
2
, e
3
The inertial coordinate system will be used to ap-
ply Newton’s second law of motion, since this law is
only valid when observing translational accelerations
from this coordinate system. The contact force coor-
dinate system is used to define the forces acting in the
contact point. The no-slip constraint coordinate sys-
tem is used for the no-slip constraint since the con-
tact point is a stationary point only in this coordinate
system. The body and wheel coordinate systems are
used to apply Euler’s equations, since their rotational
inertias remain constant in these coordinate systems
(Hughes, 1986).
The transformations B = Aθ
BA
, C = Bθ
CB
, D =
Cθ
DC
and E = Cθ
EC
between the different coordinate
systems is captured by the rotation matrices
θ
BA
=
C
ψ
−S
ψ
0
S
ψ
C
ψ
0
0 0 1
, θ
CB
=
1 0 0
0 C
γ
−S
γ
0 S
γ
C
γ
θ
DC
=
C
ϕ
0 S
ϕ
0 1 0
−S
ϕ
0 C
ϕ
, θ
EC
=
C
θ+ϕ
0 S
θ+ϕ
0 1 0
−S
θ+ϕ
0 C
θ+ϕ
where the cos(x) and sin(x) terms in the rotation ma-
trices are shortened to respectively C
x
and S
x
. For
dynamic analysis, the derivatives of the rotation ma-
trices are given by
˙
θ
BA
= θ
BA
˜
ω
BA
,
˙
θ
CB
= θ
CB
˜
ω
CB
,
˙
θ
DC
= θ
DC
˜
ω
DC
and
˙
θ
EC
= θ
EC
˜
ω
EC
where
˜
ω
BA
=
0 −
˙
ψ 0
˙
ψ 0 0
0 0 0
,
˜
ω
CB
=
0 0 0
0 0 −
˙
γ
0
˙
γ 0
˜
ω
DC
=
0 0
˙
ϕ
0 0 0
−
˙
ϕ 0 0
,
˜
ω
EC
=
0 0
˙
α
0 0 0
−
˙
α 0 0
where
˙
α =
˙
θ+
˙
ϕ.
2.2 Wheel Equations
The angular velocity vector of the wheel ω can be ex-
pressed as the sum of all individual angular velocities
each defined in their own coordinate system. When
all these angular velocities are transformed to coordi-
nate system C, leads to an expression
ω
C
= θ
CB
T
0
0
˙
ψ
+
˙
γ
0
0
+ θ
EC
0
˙
θ+
˙
ϕ
0
(1)
and correspondingly,
˜
ω
C
is a matrix composed of the
elements of vector ω
C
given by
˜
ω
C
=
0 −ω
C3
ω
C2
ω
C3
0 −ω
C1
−ω
C2
ω
C1
0
(2)
Vector r
QP
is shown in Figure 3 and is the vector
going from point P (the contact point of the wheel) to
point Q (the center of the wheel), pointing in the c
3
-
direction and its length is equal to radius of the wheel
r
QP,C
= {0 0 R}
T
. Since no slip is assumed, the veloc-
ity at the contact point satisfies v
P,C
= 0. The velocity
of the center of the wheel expressed in coordinate sys-
tem C is equal to the velocity of the contact point plus
the relative velocity due to rotation
v
Q,C
= v
P,C
+ ω
C
× r
QP,C
=
˜
ω
C
r
QP,C
DYNAMIC MODELING OF A MOMENT EXCHANGE UNICYCLE ROBOT
217

following (Kolve, 1993) to describe the derivative of
the rotation matrices and replacing the cross product
by a matrix multiplication. The same velocity can be
transformed to coordinate system A, which is the ve-
locity v
Q,A
with respect to the fixed world given by
v
Q,A
= θ
BA
θ
CB
v
P,C
+
˜
ω
C
r
QP,C
(3)
Writing out the right hand side of (3) leads to the dif-
ferential equations for the components of v
Q,A
:
˙x = R
˙
θ+
˙
ϕ+
˙
ψS
γ
C
ψ
+
˙
γC
γ
S
ψ
(4)
˙y = R
˙
θ+
˙
ϕ+
˙
ψS
γ
S
ψ
−
˙
γC
γ
C
ψ
(5)
˙z = −R
˙
γS
γ
(6)
Solving (4) and (5) for x and y results in the solution
for the first 2 independent coordinates. This can only
be done numerically since these equations are non-
integrable. The solution for z = RC
γ
can be obtained
from the analytical solution of the integral of (6).
To find an expression for the acceleration of point
Q, first (1) will be differentiated to obtain
˙
ω
C
= −
˜
ω
CB
θ
CB
T
0
0
˙
ψ
+ θ
CB
T
0
0
¨
ψ
+
¨
γ
0
0
. . .
···+ θ
EC
˜
ω
EC
0
˙
θ+
˙
ϕ
0
+ θ
EC
0
¨
θ+
¨
ϕ
0
and again,
˙
˜
ω
C
is a matrix composed of the elements
of vector
˙
ω
C
given by
˙
˜
ω
C
=
0 −
˙
ω
C3
˙
ω
C2
˙
ω
C3
0 −
˙
ω
C1
−
˙
ω
C2
˙
ω
C1
0
Differentiating (3) now leads to an expression for the
acceleration of point Q given by
˙v
Q,A
= θ
BA
˜
ω
BA
θ
CB
˜
ω
C
+ θ
CB
˜
ω
CB
˜
ω
C
+ θ
CB
˙
˜
ω
C
r
QP,C
f
x
, M
x
f
y
, τ
1
f
z
, M
z
f
wp
f
wr
f
n
Q
P
r
QP
f
g
Figure 3: Forces and moments acting on the wheel.
The gravity force vector F
G,B
does not move with
any of the angles and since its direction is unaffected
by rotation matrix θ
BA
it can be defined in the coordi-
nate system B via F
G,B
= {0 0 − m
w
g}
T
B
because of
its simplicity later on. The contact force vector F
C,B
is chosen to be defined in coordinate system B, so that
it always rotates with the yaw angle ψ but stays in the
same plane as the ground on which the wheel moves.
In this way f
wp
always points in driving direction and
f
wr
points in perpendicular direction. The third ele-
ment working on the same point is the normal force
f
n
creating F
C,B
= { f
wp
f
wr
f
n
}
T
B
. Finally, the reac-
tion force vector F
R,D
= { f
x
f
y
f
z
}
D
is chosen to be
defined in coordinate system D, so that it moves with
the body.
Newton’s second law of motion yields
∑
F
A
= m
w
˙v
Q,A
where the left hand side is the sum of previously men-
tioned forces, transformed to the inertial coordinate
system A, given by
∑
F
A
= θ
BA
F
C,B
+ F
G,B
+ θ
CB
θ
DC
F
R,D
and leads to an expression for the unknown contact
force vector
F
C,B
= θ
BA
T
m
w
˙v
Q,A
− F
G,B
− θ
CB
θ
DC
F
R,D
(7)
The reaction moment vector M
R,D
moves with the
body, just like the reaction force vector, and is there-
fore defined in coordinate system D. The second el-
ement of M
R,D
is equal to the torque applied by the
motor between the driving wheel and body leading
to M
R,D
= {M
x
τ
1
M
z
}
D
. Since the wheel is rotation
symmetric about the c
2
-axis, the pitch angles have no
influence on the inertias and Euler’s equation
∑
M =
˙
h (8)
applies in coordinate system C. The angular momen-
tum is expressed in coordinate system C by
h = J · ω =
CJ
C
C
T
· (Cω
C
) = CJ
C
ω
C
where
J
C
=
J
xx
0 0
0 J
yy
0
0 0 J
zz
The derivative of h can then be written as
˙
h =
˙
CJ
C
ω
C
+C
˙
J
C
ω
C
+CJ
C
˙
ω
C
= C(
˜
ω
CA
J
C
ω
C
+ J
C
˙
ω
C
) (9)
and substituting (9) into (8) with
∑
M = C
∑
M
C
yields
∑
M
C
=
˜
ω
CA
J
C
ω
C
+ J
C
˙
ω
C
(10)
Finally, the left hand side of (10) can be written as
∑
M
C
= θ
DC
M
R,D
− ˜r
QP,C
θ
CB
T
F
C,B
(11)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
218

where
˜r
QP,C
=
0 −r
QP,C3
r
QP,C2
r
QP,C3
0 −r
QP,C1
−r
QP,C2
r
QP,C1
0
As a final note it can be observed from Figure 3
that the only force vector creating a moment on point
Q is the contact force vector and the arm for this mo-
ment is in opposite direction of r
QP,C
. For the final
moment balance, the reacting force and moment vec-
tor have to be transformed to coordinate system C
first.
2.3 Body Equations
Figure 4 shows the forces and moments acting on the
body, where r
RQ,D
= {0 0 d
RQ
}
D
is the vector going
from point Q to R and the components of F
R
and M
R
are defined in positive direction on the wheel and thus
work in opposite direction on the body. The gravity
force vector F
GB,A
= {0 0 − m
b
g}
T
A
acts on point R,
the center of gravity for the body and inertia wheel
together. The inertia wheel is simply replaced by a
moment, M
I,D
= {τ
2
0 0}
D
, where the assumption is
made that low inertial wheel velocity allows moments
caused by quadratic velocity terms to be discarded.
f
y
, τ
1
f
x
, M
x
f
z
, M
z
f
gb
M
I
Q
R
r
RQ
Figure 4: Forces and moments acting on the body.
The angular velocity of the body is equal to that
of the wheel
ω
b,C
= θ
CB
T
0
0
˙
ψ
+
˙
γ
0
0
+ θ
EC
0
˙
ϕ
0
however it does not rotate with angle θ. The velocity
of point R is equal to the velocity of point Q plus the
relative velocity due to rotation
v
R,A
= v
Q,A
+
˜
ω
b,A
r
RQ,A
(12)
where
˜
ω
b,A
and r
RQ,A
in (12) can be expressed by the
known equations for
˜
ω
b,C
and r
RQ,D
given by
˜
ω
b,A
= θ
BA
θ
CB
˜
ω
b,C
θ
CB
T
θ
BA
T
(13)
r
RQ,A
= θ
BA
θ
CB
θ
DC
r
RQ,D
(14)
and substitution of (13) and (14) into (12) yields
v
R,A
= v
Q,A
+ θ
BA
θ
CB
˜
ω
b,C
θ
DC
r
RQ,D
(15)
Finally, differentiating the right hand side of (15)
yields
˙v
R,A
= ˙v
Q,A
+ θ
BA
(
˜
ω
BA
θ
CB
˜
ω
b,C
+ θ
CB
˜
ω
CB
˜
ω
b,C
. . .
. . . +θ
CB
˙
˜
ω
b,C
+ θ
CB
˜
ω
b,C
˜
ω
DC
θ
DC
r
RQ,D
(16)
that can be used in Newton’s second law
∑
F
A
= m
b
˙v
R,A
(17)
for the translational motion of the body. The left hand
side of (17) can be written as
∑
F
A
= −θ
BA
θ
CB
θ
DC
F
R,D
+ F
GB,A
(18)
and substitution of (18) into (17) and rearranging
leads to an expression for the reaction force vector
F
R,D
= θ
DC
T
θ
CB
T
θ
BA
T
F
GB,A
− m
b
˙v
R,A
(19)
Application of Euler’s equation on the rotational
motion of the body will result in
∑
M
D
=
˜
ω
DA
J
b,D
ω
b,D
+ J
b,D
˙
ω
b,D
where the left hand side can be written as the sum of
all moments
∑
M
D
= −r
RQ,D
× −F
R,D
− M
R,D
+ M
I,D
acting on point R. Rewriting this last expression leads
the reaction moment vector
M
R,D
=˜r
RQ,D
F
R,D
+ M
I,D
−
˜
ω
DA
J
b,D
ω
b,D
. . .
. . . − J
b,D
˙
ω
b,D
(20)
where
˜
ω
DA
and ω
b,D
in (20) can be written as
˜
ω
DA
= θ
DC
T
θ
CB
T
˜
ω
BA
θ
CB
+
˜
ω
CB
θ
DC
+
˜
ω
DC
(21)
ω
b,D
= θ
DC
T
ω
b,C
(22)
3 SPACAR
To validate the model derived in this paper, a sec-
ond independent model is created using SPACAR
(Aarts et al., 2008). SPACAR is based on the non-
linear finite element theory for multi-degree of free-
dom mechanisms and runs in a Matlab environment
and capable of analyzing the dynamics of planar and
spatial mechanisms and manipulators with flexible
links. The code listed below constructs the model of
the MEUR in this paper. The SPACAR model con-
sists of a spatial rigid beam element, a spatial wheel
element and four spatial hinge elements defined by
the commands
RBEAM
,
WHEEL
and
HINGE
. The first
number after the command is the element number.
The next two or three numbers are the coordinates,
where the numbers 1 to 5 are rotational coordinates
and 6 to 8 are translational coordinates. The last three
numbers represent the initial orientation.
DYNAMIC MODELING OF A MOMENT EXCHANGE UNICYCLE ROBOT
219

HINGE 1 1 2 0.0 0.0 1.0
HINGE 2 2 3 1.0 0.0 0.0
HINGE 3 3 4 0.0 1.0 0.0
WHEEL 4 6 5 7 0.0 1.0 0.0
HINGE 5 4 5 0.0 1.0 0.0
RBEAM 6 6 4 8 0.0 0.0 1.0
X 6 0.0 0.0 0.0495
X 7 0.0 0.0 0.0
X 8 0.00001 0.0 1.0495
FIX 1
DYNE 1 1
DYNE 2 1
DYNE 3 1
DYNE 5 1
KINX 6 1 2
END
HALT
XM 6 0.1
XM 5 0.000021213 0 0 0.00003 0 0.000021213
XM 8 0.2
XM 4 0.8000 0 0 0.002 0 0.4000
GRAVITY 0 0 -9.81
STARTDE 1 1 0 0
STARTDE 2 1 0.6 0
STARTDE 3 1 3.741592653589793 0
STARTDE 5 1 0 0
TIMESTEP 4 400
END
END
The initial values are defined in the second block
by the command
X
and assigns the robot dimensions.
In the third block the first rotational coordinate is
fixed to the world with
FIX
.
DYNE
defines the degrees
of freedom, being the first deformation of the ele-
ments 1, 2, 3 and 5, equal to respectively ψ, γ, θ and
φ.
KINX
defines two coordinates where the no-slip
condition holds.
XM
defines the point masses in coor-
dinate 6 and 8 and the inertia’s along the x, y and z
axis.
GRAVITY
takes care of the external forces act-
ing on the masses. The third and fourth number of
STARTDE
defines the initial conditions for ψ, γ, φ and
θ and the initial conditions for their time derivatives.
TIMESTEP
defines the simulation time followed by the
amount of time steps.
4 SIMULATIONS
To cross validate the model derived in Section 2 and
the model provided by SPACAR in Section 3, time
domain simulations are carried out using the numeri-
cal values listed in Table 3. During the simulation, the
trajectory of the center of the driving wheel is chosen
as a measure for the cross validation.
Table 3: Numerical values of MEUR parameters.
Wheel Body
m
w
0.1 kg m
b
0.2 kg
R 0.0495 m d
rq
1 m
J
xx
0.00002 kgm
2
J
b,xx
0.8 kgm
2
J
yy
0.00003 kgm
2
J
b,yy
0.002 kgm
2
J
zz
0.00002 kgm
2
J
b,zz
0.4 kgm
2
g 9.81 ms
−2
Different non-zero initial conditions and constant
motor torques are used and listed in Table 4. Time
simulations are computed using a non-stiff differen-
tial equation solver (Cooper, 2004) and implemented
via
ode45
in Matlab. The initial values under #1 in
Table 4 and the definition of the angles in Table 1 are
chosen such that the model starts as a stable mechani-
cal system during the simulation. In addition, a small
initial roll angle γ = 0.6 is chosen to demonstrate the
coupling effects between the lateral and longitudinal
motion of the MEUR.
Table 4: Non-zero initial conditions for the simulations.
set #1 set #2
γ(0) 0.6 0.6 rad
ϕ(0) π+ 0.6 0 rad
τ
1
0 0.1 Nm
τ
2
0 0 Nm
It can be observed from the coinciding simulation
results depicted in Figure 5 that the time trajectory
(x(t), y(t)) of the center of the driving wheel starting
in point (0, 0) undergoes a periodic oscillation in the
x direction due to the initial non-zero body pitch an-
gle ϕ(0) = π+ 0.6. Interesting to see is also the small
motion in the y direction of the center of the driving
wheel due to the a initial roll angle γ(0) = 0.6, causing
a small change in yaw angle ψ(t). With simulation re-
sults of the body pitch angle ϕ(0) = 0 and the roll an-
gle γ(0) = 0.6 depicted in Figure 6, the MEUR model
now starts in upward and unstable direction and dur-
ing the simulation we assume the MEUR can fall and
oscillate through the base plane. In addition, a con-
stant torque τ
1
= 0.1 is applied between the driving
wheel and body. In Figure 6, both models follow the
same trajectories very closely for some time but di-
verge eventually. This is due to the fact that the model
of the mechanical system is unstable at the initial con-
dition, and small numerical errors in either initial con-
ditions or numerical integration leads to exponentially
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
220
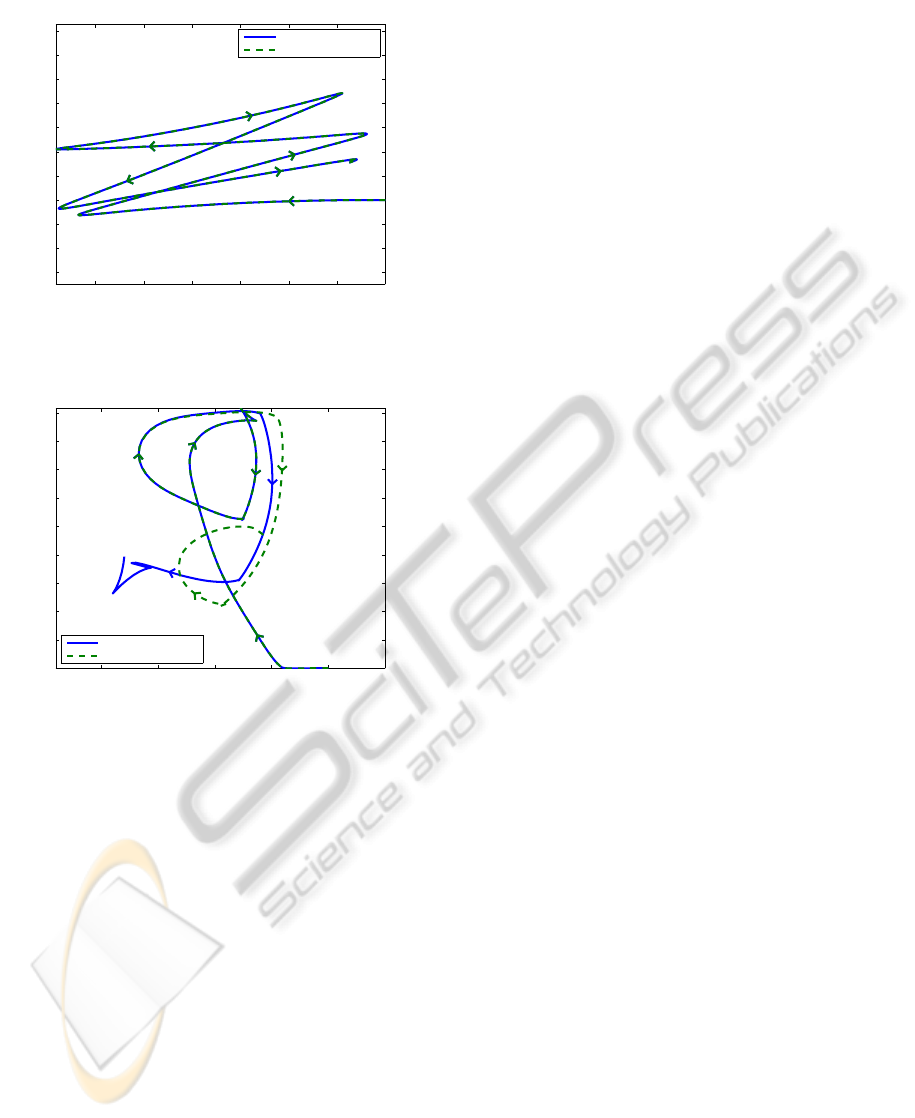
increasing differences in the simulation.
−0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
X
Y
Newtonian model 3−D
SPACAR model 3−D
Figure 5: Simulation results of the trajectory of the center
of the driving wheel starting in point (0, 0) using the param-
eters of set #1 in Table 4.
−8 −6 −4 −2 0 2
0
1
2
3
4
5
6
7
8
9
X
Y
Newtonian model 3−D
SPACAR model 3−D
Figure 6: Simulation results of the trajectory of the center
of the driving wheel starting in point (0, 0) using the param-
eters of set #2 in Table 4.
5 CONCLUSIONS
This paper presents a three dimensional nonlinear dy-
namic model for a Moment Exchange Unicycle Robot
(MEUR). The model is derived using both Newto-
nian mechanics and a non-linear finite element pack-
age for multi-degree of freedom mechanisms called
SPACAR. The simulation results presented in this pa-
per cross validate the Newtonian and the SPACAR
model, as simulations of the center of the driving
wheel coincide. Differences is simulations attributed
to small errors in the in either initial conditions or nu-
merical integration can only be observed in case of an
unstable initial condition. In addition, the simulation
results demonstrate the coupling between lateral and
longitudinal motion the center of the driving wheel.
Coupling effects are small only in the case of limited
(stabilized) motions of the MEUR.
REFERENCES
Aarts, R., Meijaard, J., and Jonker, J. (2008). SPACAR User
Manual.
Au, K. and Xu, Y. (1999). Decoupled dynamics and stabi-
lization of single wheel robot. In IEEE/RSJ Int. Conf.
on Intelligent Robots and Systems, volume 1, pages
197–203.
Cooper, J. (2004). An Introduction to Ordinary Differential
Equations. Cambridge University Press.
Dao, M. and Liu, K. (2005). Gain-scheduled stabilization
control of a unicycle robot. JSME International Jour-
nal Series C: Mechanical Systems, Machine Elements
and manufacturing, 48(4):649–656.
Hughes, P. (1986). Spacecraft Attitude Dynamics. J. Wiley.
Kolve, D. (1993). Describing an attitude. In Proc. Annual
Rocky Mountain Guidance and Control Conference,
volume 93, pages 289–303.
Majima, S., Kasai, T., and Kadohara, T. (2006). A design of
a control method for changing yaw direction of an un-
deracuatted unicycle robot. In Proc. TENCON 2006,
IEEE Region 10 Conference, pages 1–4.
Nakajima, R., Tsubouchi, T., Yuta, S., and Koyanagi, E.
(1997). A development of a new mechanism of an au-
tonomous unicycle. In IEEE/RSJ Int. Conf. on Intelli-
gent Robots and Systems, volume 2, pages 906–912.
Naveh, Y., Bar-Yoseph, P., and Halevi, Y. (1999). Nonlinear
modeling and control of a unicycle. Dynamics and
Control, 9:279–296.
Ohsaki, H., Kinoshita, M., Sugimoto, Y., Yoshida, K.,
Iwase, M., and Hatakeyama, S. (2008). Development
of a control system for supporting to grow human skill
of a unicycle. In SICE Annual Conference, pages
2229–2233.
Schoonwinkel, A. (1987). Design and Test of a Computer
Stabilized Unicycle. PhD thesis, Stanford Univ., CA.
Sheng, Z. and Yamafuji, K. (1997). Postural stability
of a human riding a unicycle and its emulationby a
robot. IEEE Transactions on Robotics and Automa-
tion, 13:709–720.
van Pommeren, J. (2007). The unibot, design and control
of a self-balancing unicycle robot. Master’s thesis,
University of Twente.
Vos, D. and Flotow, A. V. (1990). Dynamics and nonlinear
adaptive control of an autonomous unicycle: Theory
and experiment. Proc. of the 29th IEEE Conf. on De-
cision and Control, 1:182–187.
Zenkov, D., Bloch, A., and Marsden, J. (1999). Stabi-
lization of the unicycle with rider. In Proc. 38th
IEEE Conf. on Decision and Control, volume 4, pages
3470–3471.
DYNAMIC MODELING OF A MOMENT EXCHANGE UNICYCLE ROBOT
221
