
STOCHASTIC OPTIMIZATION FOR ENVIRONMENTALLY
POWERED WSNS USING MDP MODELS
WITH MULTI-EPOCH ACTIONS
Alexandru E. S¸us¸u
EPFL, Station 14, 1015 Lausanne, Switzerland
Keywords:
Wireless Sensor Nodes, Energy Harvesting, Constrained Markov Decision Processes, Multi-epoch Actions.
Abstract:
The controller of an environmentally powered wireless sensor node (WSN) seeks to maximize the quality
of the data measurements and to communicate frequently with the network, while balancing the uncertain
energy intake with the consumption. To devise such system manager we use the Markov Decision Process
(MDP) optimization framework. However, our problem has physical characteristics that are not captured in
the standard MDP model: namely, the radio interface takes a non-negligible amount of time to synchronize
with the network before starting to transmit the acquired data, which translates into MDP actions spanning
over multiple epochs. Optimizing without considering this multi-epoch actions requirement results in sub-
optimal MDP policies, which, under certain conditions described in the paper, waste on average 50% of the
radio activity. Therefore, we incorporate this new constraint in the MDP formulation, and obtain an optimal
policy that performs on average 83% better than a standard MDP policy. This solution outperforms also some
heuristic policies we use for comparison by 14% and 154%.
1 INTRODUCTION
Advances in microelectronic technology allow us to
build low-cost and low-power miniaturized Wireless
Sensor Nodes (WSN), which can sense and transmit
the information. Such devices seek to attain a good
quality of service, while functioning for a long dura-
tion. Therefore, a series of energy management tech-
niques are proposed in the literature (Anastasi et al.,
2009) to reduce the power consumption of the sen-
sor node, among which the most notable one is duty
cycling the activity of the components of the node,
such as powering on and off the radio transceiver
periodically. Another possibility is to harvest and
use the energy from the environment (Paradiso and
Starner, 2005). Even if the harvesters can ensure a
theoretically unlimited amount of energy over time,
the power they provide is unpredictable. We address
this issue by using power storage elements, such as
rechargeable batteries or supercapacitors, in order for
the system to have energy when it is not available
from the harvester. However, these buffers are finite,
and, therefore, they cannot completely hide the unre-
liability of the energy source, for example, when the
harvester is not generating energy for a long period of
time.
Concrete examples of environmentally powered
sensor nodes are found in the literature: solar pow-
ered devices (Moser et al., 2008; Jiang et al., 2005;
Dubois-Ferri
`
ere et al., 2006), thermal powered (Gy-
selinckx et al., 2005) and vibrational ones (Roundy
et al., 2005).
To motivate the novelty of the paper, we focus on
a particular characteristic of these energy harvesters.
While the solar radiation and, together with it, the en-
ergy output of a photovoltaic panel, have normally a
slow variation over the range of hours, an eolian har-
vester can experience fast variations, in the order of
seconds (Twidell and Weir, 1986). We call the former
type a slow-dynamics harvester, and the latter a high-
dynamics one.
In this paper, we consider a wireless sensor node
powered by such a high-dynamics harvester, which
uses eolian energy. The node runs a reactive applica-
tion, which senses and transmits wirelessly the data to
a basestation at a specified rate. This rate is normally
in the same order of magnitude with the frequency
of variation of the harvested energy. Managing such
a device is a novel contribution and, due to the fast
temporal properties of the harvester, it raises new con-
straints that we need to take into consideration.
Our goal is to devise a sensor node controller that
maximizes the number of measurements of the phys-
ical property in the time unit (the sensing duty cycle)
238
E. ¸Su¸su A. (2010).
STOCHASTIC OPTIMIZATION FOR ENVIRONMENTALLY POWERED WSNS USING MDP MODELS WITH MULTI-EPOCH ACTIONS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 238-243
DOI: 10.5220/0002940802380243
Copyright
c
SciTePress

and transmit the data to the basestation at the specified
rate. Similar optimization formulations can be found
in (Kansal et al., 2004), which adapts the system duty
cycle in order to match the energy profile intake, and
in (Niyato et al., 2007), which computes policies that
optimize certain Quality of Service (QoS) metrics.
Differently from them, we perform multi-criteria op-
timization, having two types of commands to manip-
ulate the sensing and the radio transceiver duty cycle.
Since, in principle, we also want to have a reduced
production cost, in this paper we consider a sensor
node system with: i) an energy harvester device that
generates on average the required energy level, since
this impacts the production cost; ii) a small sized en-
ergy storage element - the size of the buffer is deter-
mined by the longest ”blackout” period. We argue
that the problem we present is useful when the system
has little energy in the storage element, when predic-
tion of the energy intake can bring great benefit.
The contributions of the paper are: i) we build
a representative Markov chain model for the eolian
harvester powering the node; ii) we reduce the sen-
sor node control problem to an average reward Con-
strained Markov Decision Process (MDP) formula-
tion, one of the most complex planning problems; iii)
then, we introduce in the optimization problem the
proposed multi-epoch action constraints, relevant for
our setting; iv) we solve the problem rigorously using
various tools we developed on top of existing soft-
ware, and compare the benefits of our method to some
simple heuristic policies we introduce.
2 DESCRIPTION OF THE
SYSTEM MODEL AND OF THE
OPTIMIZATION PROBLEM
As advocated in (S¸us¸u et al., 2008; Poggi et al., 2000),
an accurate model of the energetic sources is essen-
tial for evaluating the system’s average productivity
or the availability, and, in principle, to ensure the
system’s management. Simulation provides results
only for the period over which environmental energy
data is available. Since the results are different if we
use other time series with the same statistical proper-
ties, we are interested to know the range of these re-
sults. Therefore, finding a representative model able
to capture the uncertainty of the energy source re-
quires attentive thinking. (Poggi et al., 2000) pro-
poses a first-order stationary Discrete Time Markov
Chain (DTMC) model for each month of the year,
due to the big monthly variations, built from traces
taken over a period of 20 years. In a similar direction
goes (Nfaoui et al., 2003) for wind speed measure-
ments.
Similarly, in this paper we use an offline built first-
order DTMC model for an eolian energy harvester us-
ing wind speed traces collected by the SensorScope
project (Barrenetxea et al., 2006) from EPFL. Since
we do not perform experiments with a real device,
the model for the energy harvester is using simplify-
ing assumptions such as the energy produced by an
eolian harvester is directly proportional to the wind
speed. Therefore, in this paper we do not put accent
on an end-to-end treatment of this problem from the-
ory to full implementation, but focus mostly on the
modeling and optimization part.
The method described in this paper is general in
the sense it can be applied in settings using other
forms of environmental energy, which can be repre-
sented by Markovian models.
The system has a dedicated controller that ob-
serves the parameters of the node and controls it in
order to optimize its functionality. A command speci-
fies the sensing duty cycle (e.g., with values 0%, 50%,
100%) and the power state of the radio transceiver.
Our modeling problem uses a discrete time setting:
the controller is invoked at each time step = 1 second
period (or epoch).
We assume, after studying the real and simulated
values of our sensor node platform, that the energy
consumed by the operation of the radio transceiver in
an epoch is 40 mJ. The energy consumed in an epoch
by the sensing equipment and the microcontroller is a
multiple of 10 mJ, proportional to the duty cycle. We
also assume the sensor node has a small energy stor-
age element of 1,000 mJ. For our model, we assume
that a unit of energy represents 10 mJ.
2.1 The MDP Model
As already discussed, we formulate this control prob-
lem on a discrete time MDP model, M , which is de-
fined by: i) a finite set of reachable states (under any
policy), S ; ii) a finite set of actions, A ; iii) an ini-
tial probability distribution over S , p
1
; iv) a transition
probability matrix for each action, represented by the
function p : S × A × S → [0,1] denoting the proba-
bility to transition at a destination state from a source
state if using a specific action; v) two reward func-
tions r
R
,r
SDC
: S → R, which we define below.
For our setting, M is obtained through the par-
allel composition of the system modules: the energy
harvester, the energy buffer, the node (with the sens-
ing and radio components) and the controller, as de-
picted in Figure 1. The MDP actions are the already
discussed commands that control the sensing duty-
STOCHASTIC OPTIMIZATION FOR ENVIRONMENTALLY POWERED WSNS USING MDP MODELS WITH
MULTI-EPOCH ACTIONS
239

Figure 1: Behavioral black-box model of the system.
cycle and the radio. The duration of an epoch takes
time step units.
MDP States and Actions: Two of the state vari-
ables of the system are bu f f erLevel, which repre-
sents the energy stored in the energy buffer at each
epoch and harvesterState, which describes the en-
ergy output of the harvester in a period. The action
variables, which are also state variables for the MDP
model, are SDCAction, which specifies the sensing
duty cycle of the node, and RAction, which represents
the power command to the radio transceiver.
An MDP state s ∈ S is defined by the tuple of
values of these four variables. Also, an MDP ac-
tion a ∈ A is completely defined by the values of
SDCAction and RAction in the following epoch.
MDP Rewards: To express the quality of the sam-
pled data by the node, we add to each MDP state s
the reward r
SDC
(s), which is a function of the sensing
duty cycle. We use in this paper a concave function:
0.0 for 0% duty cycle (for SDCAction = 0), 8.0 for
50% duty cycle (SDCAction = 1) and 10.0 for 100%
duty cycle (SDCAction = 2).
As already discussed, we can put a soft real time
constraint on the functionality of the node: we want to
have a certain average period, which we call T
lateness
,
of transmitting via radio the acquired data to the
basestation. We do this in order that the basesta-
tion continuously benefits of sensed data that is about
T
lateness
seconds old.
To account for the frequency of sending via ra-
dio the data we put on each state s the reward r
R
(s)
with value 1.0 if s employs the radio transceiver
(RAction = 1) and 0.0 if not (RAction = 0).
We also do not want to allow the possibility of is-
suing an action that results in running out of energy
without terminating the initiated action. Therefore,
we put big negative rewards on such states, such that
the solution MDP policy avoids them. This makes
sense since the solution either maximizes the objec-
tive function value, or keeps the value of the con-
straint above a specified threshold and using any num-
ber of big negative reward states in the solution is not
compatible with these goals. For the simulations we
perform in Section 3.1, if we run out of power in an
epoch (i.e, bu f f erLevel
0
< 0) we consider the sensing
duty cycle reward and the radio reward to be zero.
Semantics: The precise semantics of the MDP model
is the following: i) we start with RAction = 0 and
SDCAction = 2 (the radio transceiver is turned off
and the node senses with maximum duty cycle), and
with bu f f erLevel set at maximum; ii) the energy in-
take happens at the beginning of the epoch, instan-
taneously, and the consumption happens immediately
afterwards during the same epoch, by executing the
actions for RAction and SDCAction, associated to the
state; iii) the controller observes the values of the sys-
tem variables at the beginning of the epoch and com-
putes the values of RAction
0
and SDCAction
0
for the
next epoch.
2.2 The Optimization Problem
As we have previously stated, we seek to maximize
the sensing MDP reward, while meeting an average
radio transmission rate of 1/T
lateness
.
The solution to our problem is a Markov ran-
domized stationary policy π : S → 4(A), which pre-
scribes for each state the optimal probability distribu-
tion over the actions the controller has to use in order
to attain the problem objectives.
The mathematical formulation of our problem is
given in (1). T
latency
is a constant representing the
number of epochs the radio needs to transmit, on aver-
age, during a T
lateness
period, for the time being, equal
to 1.
max
π
lim
N→∞
1
N
E
π
{
N−1
∑
i=0
r
SDC
(i)} (1)
s.t. lim
N→∞
1
N
E
π
{
N−1
∑
i=0
r
R
(i)} ≥
T
latency
T
lateness
We can prove our MDP is unichain. In such a case,
(Puterman, 1994) arguments we can reduce this opti-
mization problem to the Linear Program (LP) in (2).
The variables of the LP, x
s,a
, are called limiting aver-
age state-action frequencies and represent the proba-
bility the system occupies state s and chooses action
a under the solution policy corresponding to x.
max
∑
s∈S
∑
a∈A
x
s,a
r
SDC
(s) (2)
s.t.
∑
a∈A
x
s,a
−
∑
s
0
∈S
∑
a∈A
p(s
0
|s,a)x
s
0
,a
= 0, ∀s ∈ S ,
∑
s∈S
∑
a∈A
x
s,a
= 1,
∑
s∈S
∑
a∈A
x
s,a
r
R
(s,a) ≥
T
latency
T
lateness
,
x
s,a
≥ 0, ∀s ∈ S ,a ∈ A
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
240

MDP
const int PSEMAX = 100; //the capacity of the energy storage element
//(1 unit = 10 mJ)
module Harvester
harvesterState: [0..9] init initHarvesterState;
[tick] harvesterState = 0 -> 0.927 : (harvesterState’ = 0)
+ 0.064 : (harvesterState’ = 1) + ...;
//...
//the rest of the description of this module is omitted
endmodule
formula update_bufferLevel = bufferLevel + harvesterState - SDCAction
- 4*RAction;
module EnergyBuffer
bufferLevel:[0..PSEMAX] init PSEMAX;
[tick] update_bufferLevel > 0 & update_bufferLevel <= PSEMAX ->
(bufferLevel’ = update_bufferLevel);
[tick] update_bufferLevel > PSEMAX -> (bufferLevel’ = PSEMAX);
[tick] update_bufferLevel <= 0 -> (bufferLevel’ = 0);
endmodule
//A generic system controller: see both RadioController and
SDCController
module RadioController
RAction:[0..1];
[tick] true -> (RAction’ = 0);
[tick] true -> (RAction’ = 1);
endmodule
module SDCController
SDCAction:[0..2];
[tick] true -> (SDCAction’ = 0);
[tick] true -> (SDCAction’ = 1);
[tick] true -> (SDCAction’ = 2);
endmodule
Figure 2: The PRISM MDP model of the system.
3 PRACTICAL DETAILS OF THE
PROBLEM
To concretely solve the problem, we start by speci-
fying the model in PRISM, a probabilistic analysis
tool (Kwiatkowska et al., 2004) we use extensively
in our project. A simple model example with a freely
specified system controller, the unknown of our prob-
lem, is given in Figure 2.
We develop some small programs that take the
MDP representation exported from PRISM and out-
put the corresponding LP that solves the MDP opti-
mization problem. To make the problem more precise
and robust, the coefficients of the LP have 16 decimal
digits precision. We solve the LP with CPLEX (IBM
ILOG, 2008), a fast commercial (I)LP solver, which
is able to handle LPs up to tenths of thousands of vari-
ables.
The capacity of the energy storage element,
PSEMAX, is 100 and T
lateness
is 10. We also assume
there is only one initial state, the one with a full en-
ergy storage element, with the maximum level of har-
vested energy, with RAction = 0 and SDCAction = 2.
Once the MDP policy is obtained, to assess that
it conforms to the specification - mainly that the ex-
pected radio reward is met - but also to compute vari-
ous other properties such as the value of the expected
sensing reward, we compose the solution policy with
the PRISM specification of the MDP and perform ex-
haustive simulation (i.e., probabilistic model check-
ing) by using the cumulative reward properties of
PRISM to compute the expected total rewards for a
specified number of steps, and then compute the aver-
age reward per epoch.
Since we want to show the benefits of implement-
ing a stochastic policy controller, we introduce two
more runtime policies, which are deterministic and
compare the three of them in the following sections.
The three different controllers are:
• MDP: this is the stochastic policy, which uses
the energy harvester model to accurately predict
the future energy income. Relying on the cur-
rent value of bu f f erLevel and on the prediction,
the policy chooses the optimal sensing duty cy-
cle, SDCAction
0
, and the power state for the radio,
RAction
0
.
• Conservative: the policy varies the sensing duty
cycle proportionally with the bu f f erLevel. Also,
the policy controls the radio the following way: in
the case bu f f erLevel is too small, the controller
assumes the worst-case situation under which it
does not receive anymore energy from the envi-
ronment, and turns off the radio; otherwise, the
radio is turned on, periodically.
• Greedy: the policy uses the maximum sens-
ing duty cycle, no matter what the value of
bu f f erLevel is. The node tries to turn the radio
on and to send data to the basestation periodically,
at every T
lateness
seconds, disregarding the fact it
might run out of power.
The Conservative and Greedy policies do not
make use of the probabilistic harvester model. The
Greedy controller does not care about the state of
the energy harvester and observes, at most, only the
charge of the energy buffer. In all the experiments
we perform in the following sections, we count for
the radio and sensing rewards of the policies only the
epochs in which the system does not run out of en-
ergy.
3.1 Considering The Multi-epoch Radio
Transceiver Actions
So far, we did not take into consideration that turn-
ing on the radio transceiver of the sensor node fol-
lowed by transmitting the acquired data are costly
operations, which can take longer than one epoch
STOCHASTIC OPTIMIZATION FOR ENVIRONMENTALLY POWERED WSNS USING MDP MODELS WITH
MULTI-EPOCH ACTIONS
241
module RadioController
RAction:[0..1];
counter:[0..T_LATENESS - 1];
[tick] counter = 0 -> (RAction’ = 0) & (counter’ = 1);
[tick] counter > 0 & counter <= T_LATENCY - 1 & RAction = 0 ->
(RAction’ = 0)
& (counter’ = counter + 1);
[tick] counter = 0 -> (RAction’ = 1) & (counter’ = 1);
[tick] counter > 0 & counter <= T_LATENCY - 1 & RAction = 1 ->
(RAction’ = 1) & (counter’ = counter + 1);
[tick] counter >= T_LATENCY & counter < T_LATENESS - 1 ->
(RAction’ = 0) & (counter’ = counter + 1);
[tick] counter = T_LATENESS - 1 -> (RAction’ = 0) & (counter’ = 0);
endmodule
Figure 3: The PRISM radio controller specification with
T
latency
-epochs long actions.
because the node has to synchronize with the net-
work. For the SensorScope platform, which uses the
BMAC protocol, the time the radio needs to synchro-
nize to the network and send the data is T
latency exact
=
2.25 seconds (S¸us¸u et al., 2008). For the sake of the
energy efficiency, since the radio is the most power
consuming component of the sensor node, we do
not want to turn it off while synchronizing or trans-
mitting. Therefore, under these conditions, the ra-
dio power off command should be issued at least
T
latency
= d
T
latency exact
time step
e = 3 epochs later from the mo-
ment we turned on the radio.
In order to handle the optimization with multi-
epoch actions, we add a new state variable, counter,
to the PRISM model, which keeps track of how many
epochs have passed from the beginning of the cur-
rent RAction = 1 issue. We then allow to change to
RAction = 0 only if counter ≥ T
latency
.
Adding this variable gives us the possibility to turn
on the radio only at the beginning of the T
lateness
pe-
riod for exactly T
latency
periods. This implies that the
counter variable has to take values between 0 and
T
lateness
− 1. The PRISM specification of the radio
controller with the variable counter is given in Fig-
ure 3. We compose this component with the others
of the model in Figure 2. The radio constraint in our
formulations (1) and (2), specifying to have at least
T
latency
/T
lateness
average radio reward per epoch, is in
accordance with the behavior described above.
4 OPTIMAL SOLUTION AND
COMPARISON
We call π
3
the MDP optimal policy that generates
only T
latency
-epochs long radio actions (T
latency
= 3)
and π
1
the one on which we do not impose this con-
straint.
We present in Table 1 the simulation results ob-
tained with PRISM for π
3
, together with the ones for
the Conservative and the Greedy policies, for which
Table 1: The expected total radio (R) and sensing (SDC) re-
wards of the solution policies for constrained optimization,
for various horizon length (hl) values.
module RadioController
RAction:[0..1];
counter:[0..T_LATENESS - 1];
[tick] counter = 0 -> (RAction’ = 0) & (counter’ = 1);
[tick] counter > 0 & counter <= T_LATENCY - 1 & RAction = 0 ->
(RAction’ = 0)
& (counter’ = counter + 1);
[tick] counter = 0 -> (RAction’ = 1) & (counter’ = 1);
[tick] counter > 0 & counter <= T_LATENCY - 1 & RAction = 1 ->
(RAction’ = 1) & (counter’ = counter + 1);
[tick] counter >= T_LATENCY & counter < T_LATENESS - 1 ->
(RAction’ = 0) & (counter’ = counter + 1);
[tick] counter = T_LATENESS - 1 -> (RAction’ = 0) & (counter’ = 0);
endmodule
Figure 3: The PRISM radio controller specification with
T
latency
-epochs long actions.
the radio and sensing rewards of the policies only the
epochs in which the system does not run out of en-
ergy.
3.1 Considering The Multi-epoch Radio
Transceiver Actions
So far, we did not take into consideration that turn-
ing on the radio transceiver of the sensor node fol-
lowed by transmitting the acquired data are costly
operations, which can take longer than one epoch
because the node has to synchronize with the net-
work. For the SensorScope platform, which uses the
BMAC protocol, the time the radio needs to synchro-
nize to the network and send the data is T
latency exact
=
2.25 seconds (S¸ us¸u et al., 2008). For the sake of the
energy efficiency, since the radio is the most power
consuming component of the sensor node, we do
not want to turn it off while synchronizing or trans-
mitting. Therefore, under these conditions, the ra-
dio power off command should be issued at least
T
latency
= d
T
latency exact
time step
e = 3 epochs later from the mo-
ment we turned on the radio.
In order to handle the optimization with multi-
epoch actions, we add a new state variable, counter,
to the PRISM model, which keeps track of how many
epochs have passed from the beginning of the cur-
rent RAction = 1 issue. We then allow to change to
RAction = 0 only if counter ≥ T
latency
.
Adding this variable gives us the possibility to turn
on the radio only at the beginning of the T
lateness
pe-
riod for exactly T
latency
periods. This implies that the
counter variable has to take values between 0 and
T
lateness
− 1. The PRISM specification of the radio
controller with the variable counter is given in Fig-
ure 3. We compose this component with the others
of the model in Figure 2. The radio constraint in our
formulations (1) and (2), specifying to have at least
T
latency
/T
lateness
average radio reward per epoch, is in
accordance with the behavior described above.
4 OPTIMAL SOLUTION AND
COMPARISON
We call π
3
the MDP optimal policy that generates
only T
latency
-epochs long radio actions (T
latency
= 3)
and π
1
the one on which we do not impose this con-
straint.
We present in Table 1 the simulation results ob-
tained with PRISM for π
3
, together with the ones for
the Conservative and the Greedy policies, for which
we present only the radio rewards that are T
latency
-
epochs (or more) long. As we can see, the π
3
pol-
icy has average rewards per epoch of 0.30 for the ra-
dio and 4.53 for sensing. π
1
attains on average per
epoch rewards of 0.30 for the radio (out of which only
49.57% satisfies the T
latency
constraint) and 4.96 for
sensing. To compare π
1
and π
3
we use the product be-
tween the expected T
latency
-feasible radio reward and
the expected sensing reward. This product is 0.744
for the former and 1.359 for the latter, which means
π
3
performs with 83% better than π
1
. Using the same
metric, π
3
is better with 14% than the Conservative
policy and with 154% than the Greedy one. The
Greedy policy is the only one that runs out of energy,
about 1.73% of the time.
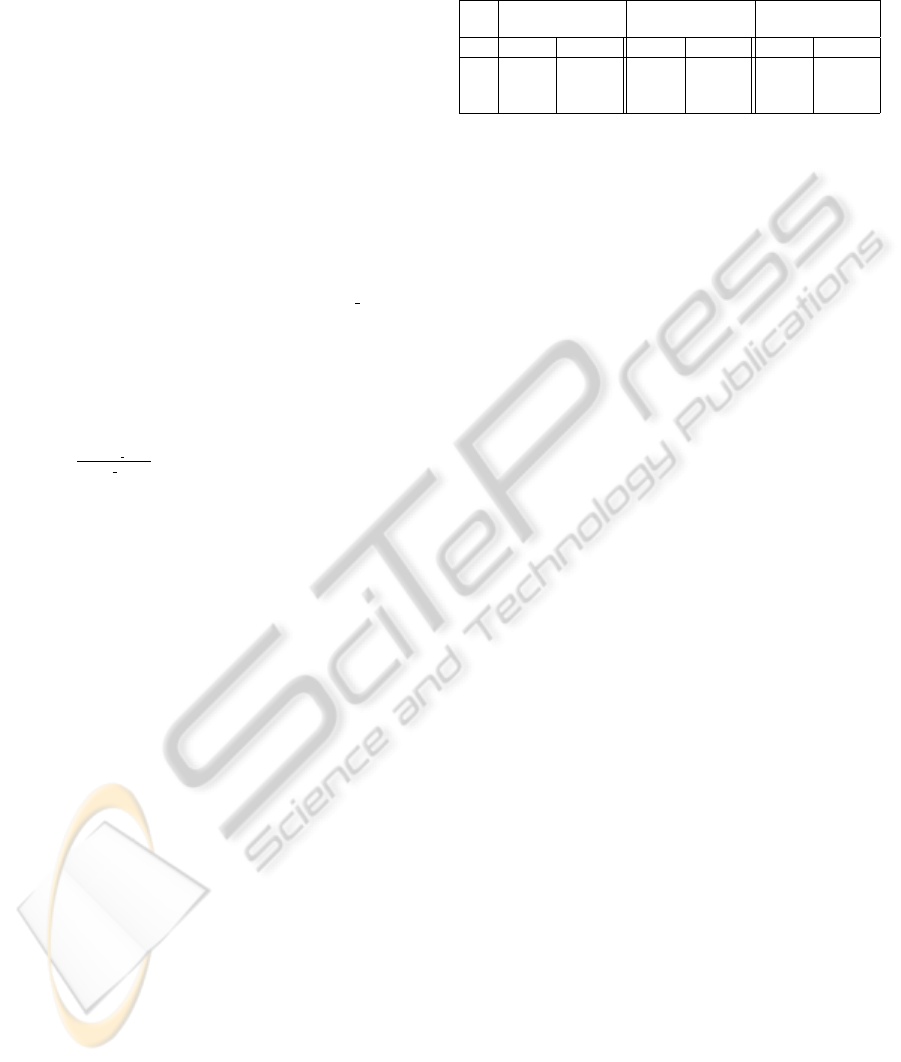
Table 1: The expected total radio (R) and sensing (SDC) re-
wards of the solution policies for constrained optimization,
for various horizon length (hl) values.
MDP Conservative Greedy
hl policy π
3
policy policy
R SDC R SDC R SDC
10
4
3,099 45,587 1,945 61,768 1,031 52,727
10
5
30,822 453,302 19,395 615,398 10,192 524,071
10
6
308,055 4,530,441 193,893 6,151,698 101,809 5,237,512
The MDP has 39,390 reachable states. The as-
sociated LP uses six times more variables and takes
more than six days to be solved exactly on a stan-
dard computer platform. Therefore, we use competi-
tive approximation methods, the details of which we
omit in this paper, to find the solution, which reduce
the search time to a couple of hours.
The optimal policy π
3
prescribes for each reach-
able state of the system the best sensing duty cycle
and radio management that maximizes the expected
sensing quality, generates only T
latency
-epochs long
radio transmissions and does not run out of energy,
for the given harvester DTMC model.
we present only the radio rewards that are T
latency
-
epochs (or more) long. As we can see, the π
3
pol-
icy has average rewards per epoch of 0.30 for the ra-
dio and 4.53 for sensing. π
1
attains on average per
epoch rewards of 0.30 for the radio (out of which only
49.57% satisfies the T
latency
constraint) and 4.96 for
sensing. To compare π
1
and π
3
we use the product be-
tween the expected T
latency
-feasible radio reward and
the expected sensing reward. This product is 0.744
for the former and 1.359 for the latter, which means
π
3
performs with 83% better than π
1
. Using the same
metric, π
3
is better with 14% than the Conservative
policy and with 154% than the Greedy one. The
Greedy policy is the only one that runs out of energy,
about 1.73% of the time.
The MDP has 39,390 reachable states. The as-
sociated LP uses six times more variables and takes
more than six days to be solved exactly on a stan-
dard computer platform. Therefore, we use competi-
tive approximation methods, the details of which we
omit in this paper, to find the solution, which reduce
the search time to a couple of hours.
The optimal policy π
3
prescribes for each reach-
able state of the system the best sensing duty cycle
and radio management that maximizes the expected
sensing quality, generates only T
latency
-epochs long
radio transmissions and does not run out of energy,
for the given harvester DTMC model.
5 CONCLUSIONS
In this paper we have modeled and improved the func-
tionality of a wireless sensor node with Markov De-
cision Processes (MDPs). Because of the long time
the radio transceiver takes to synchronize with the
network, we have introduced MDP actions that take
longer than one epoch to complete. Optimizing with-
out taking into consideration these multi-epoch ac-
tions results in suboptimal MDP policies. We pro-
posed a method to find an optimal solution and com-
pared the result to various heuristic policies.
Our problem with multi-epoch actions has some
similarities with the Semi-Markov Decision Process
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
242

(SMDP) (Puterman, 1994; Hu and Yue, 2007) models
with variable sojourn times. Note that our setting is
even more different, since we have action types with
different completion times.
REFERENCES
Anastasi, G., Conti, M., Di Francesco, M., and Passarella,
A. (2009). Energy conservation in wireless sensor net-
works: A survey. Ad Hoc Netw., 7(3):537–568.
Barrenetxea, G., Dubois-Ferriere, H., Meier, R., and Selker,
J. (2006). A weather station for SensorScope. In
Demo Session, In Information Processing in Sensor
Networks (IPSN 2006).
Dubois-Ferri
`
ere, H., Meier, R., Fabre, L., and Metrailler,
P. (2006). TinyNode: A Comprehensive Platform for
Wireless Sensor Network Applications. In Informa-
tion Processing in Sensor Networks (IPSN 2006).
Gyselinckx, B., Hoof, C. V., Ryckaert, J., Yazicioglu, R. F.,
Fiorini, P., and Leonov, V. (18-21 Sept. 2005). Hu-
man++: Autonomous wireless sensors for body area
networks. In Custom Integrated Circuits Conference,
2005. Proceedings of the IEEE 2005 , vol., no.pp. 13-
19.
Hu, Q. and Yue, W. (2007). Markov Decision Processes
with Their Applications. Advances in Mechanics and
Mathematics, v. 14. Springer, Dordrecht.
IBM ILOG (2008). ILOG CPLEX User’s Manual.
Jiang, X., Polastre, J., and Culler, D. E. (2005). Perpetual
environmentally powered sensor networks. In IPSN,
pages 463–468.
Kansal, A., Potter, D., and Srivastava, M. B. (2004). Per-
formance aware tasking for environmentally powered
sensor networks. SIGMETRICS Perform. Eval. Rev.,
32(1):223–234.
Kwiatkowska, M., Norman, G., and Parker, D. (2004).
Prism 2.0: A tool for probabilistic model checking.
QEST, 00:322–323.
Moser, C., Thiele, L., Brunelli, D., and Benini, L. (2008).
Approximate control design for solar driven sensor
nodes. In HSCC ’08: Proceedings of the 11th interna-
tional workshop on Hybrid Systems, pages 634–637,
Berlin, Heidelberg. Springer-Verlag.
Nfaoui, H., Essiarab, H., and Sayigh, A. (2003). A stochas-
tic Markov chain model for simulating wind speed
time series at Tangiers, Morocco. Renewable Energy
29 1407-1418.
Niyato, D., Hossain, E., and Fallahi, A. (2007). Sleep
and wakeup strategies in solar-powered wireless sen-
sor/mesh networks: Performance analysis and opti-
mization. IEEE Transactions on Mobile Computing,
6(2):221–236.
Paradiso, J. A. and Starner, T. (2005). Energy scavenging
for mobile and wireless electronics. Pervasive Com-
puting, IEEE, 4(1):18–27.
Poggi, P., Notton, G., Muselli, M., and Louche, A. (2000).
Stochastic study of hourly total solar radiation in Cor-
sica using a Markov model. International Journal of
Climatology, Volume 20, Issue 14, Pages 1843 - 1860.
Puterman, M. L. (1994). Markov Decision Processes:
Discrete Stochastic Dynamic Programming. Wiley-
Interscience.
Roundy, S., Leland, E. S., Baker, J., Carleton, E., Reilly,
E., Lai, E., Otis, B., Rabaey, J. M., Wright, P. K., and
Sundararajan, V. (2005). Improving power output for
vibration-based energy scavengers. Pervasive Com-
puting, IEEE, 4(1):28–36.
S¸us¸u, A. E., Acquaviva, A., Atienza, D., and Micheli, G. D.
(2008). Stochastic modeling and analysis for envi-
ronmentally powered wireless sensor nodes. Model-
ing and Optimization in Mobile, Ad Hoc, and Wireless
Networks and Workshops, 2008. WiOPT 2008. 6th In-
ternational Symposium on, pages 125–134.
Twidell, J. W. and Weir, A. D. (1986). Renewable energy
resources.
STOCHASTIC OPTIMIZATION FOR ENVIRONMENTALLY POWERED WSNS USING MDP MODELS WITH
MULTI-EPOCH ACTIONS
243
