
EFFICIENT IMPLEMENTATION OF CONSTRAINED ROBUST
MODEL PREDICTIVE CONTROL USING A STATE SPACE MODEL
Amira Kheriji, Faouzi Bouani and Mekki Ksouri
Laboratory of Analysis and Control of Systems, National Engineering School of Tunis, B.P 37, 1002 Tunis, Tunisia
Keywords:
Predictive control, Parametric uncertainty, State space model, Generalized geometric programming, Con-
strained control, Set-point tracking, Disturbance rejection.
Abstract:
The goal of this paper is to evaluate the closed loop performances of a new approach in constrained state
space Robust Model Predictive Control (RMPC) in the presence of parametric uncertainties. The control law
is obtained by the resolution of a min-max optimization problem, initially non convex, under input and input
deviation constraints, using worst case strategy. The technique used is the Generalized Geometric Program-
ming (GGP) which is a global optimization method for non convex functions constrained in a specific domain.
The key idea of the proposed approach is the convexification of the optimization problem allowing to com-
pute the optimal control law using standard optimization technique. The proposed method is efficient since it
guarantees set-point tracking different from the origin and non zero disturbances rejection. The efficiency of
this approach is illustrated with two examples and compared with a recent state space RMPC algorithm.
1 INTRODUCTION
The MPC algorithms present a series of selling points
over other methods amongst which stand out: its abil-
ity to handle non linear systems, multi input mutlti
output systems as well as systems having input and/or
state constraints. The model quality plays a vital role
in MPC, but in reality there always exist model un-
certainties, which may significantly degrade the sys-
tem performances (Fukushima et al., 2007). Uncer-
tainties can be represented in different forms reflect-
ing in certain ways the knowledge of the physical
mechanisms which cause the discrepancybetween the
model and the process (Camacho and Bordons, 2004).
To describe the dynamic of the system, structured un-
certainty was used by several Robust MPC (RMPC)
works. A number of RMPC methods have been de-
veloped to cope with the presence of the uncertain-
ties in the system model. A representative list of
RMPC methods includes: (Campo and Morari, 1987),
(Cordon and Boucher, 1994), (Kothare et al., 1996),
(Rossiter and Kouvaritakis, 1998), (Huaizhong et al.,
1998), (Lee and Kouvaritakis, 2000), (Ramirez et al.,
2002), (Pannochia, 2004), (Fukushima et al., 2007),
(Alamo et al., 2004), (Bouzouita et al., 2007), (Mayne
et al., 2009), (Qian et al., 2010).
Most existing state-space RMPC algorithms are
unable to control uncertain systems when the set-
point is different from the origin or when it is changed
such as LMI method introduced by (Kothare et al.,
1996). Another limitation of this method consists on
returning local optimum in some cases.
In the present work, we evaluate the closed loop
performances of the proposed state space RMPC ap-
proach. This approach uses the state space output de-
viation method presented by (Watanabet et al., 1991)
to compute the j step ahead output predictor with a
finite prediction horizon since this method gives ro-
bust adaptive controlled results against the unknown
plant parameters. Thus, the optimal control actions
are determined by a min-max optimization problem.
However, the criterion to be optimized is initially non
convex relatively to the uncertain parameters and the
control action. Hence, it can’t be solved by a standard
optimization technique. To overcome this difficulty,
the GGP method, which is a global optimization tech-
nique, is adopted to convexify the criterion by means
of variable transformations.
The main features of the proposed algorithm are:
• guarantee non zero set-point tracking,
• move the system with time-varying model uncer-
tainty form set-point to another without offset,
• satisfy process constraints,
• reject non zeros disturbances,
116
Kheriji A., Bouani F. and Ksouri M. (2010).
EFFICIENT IMPLEMENTATION OF CONSTRAINED ROBUST MODEL PREDICTIVE CONTROL USING A STATE SPACE MODEL.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 116-121
DOI: 10.5220/0002945101160121
Copyright
c
SciTePress

• the on-line optimization algorithm is computed
with a reasonable amount of time.
The efficiency of this algorithm is illustrated
through two examples and compared with the method
proposed by (Pannochia, 2004).
2 GENERALIZED PREDICTIVE
CONTROL ALGORITHM
In this section, we will be based on the output devia-
tion method introduced by (Watanabet et al., 1991)
to compute the j step ahead output predictor value
as well as the cost function. It is already proved
that this method gives robust adaptive controlled re-
sult against the unknown plant parameters compared
with the direct output method. The model considered
at first for uncertain system is a linear discrete time
single-input/single-output described by the following
CARIMA model of the plant results performing an
effective integral action:
A(q
−1
)∆y(k) = B(q
−1
)∆u(k) (1)
where: - ∆y(k) and ∆u(k) are respectively the output
and the input deviation system.
- ∆ is the integral action which ensures offset-free
steady-state response in the presence of variable set
point.
- A(q
−1
), B(q
−1
) and ∆(q
−1
) are polynomials on
q
−1
with bounded coefficients:
A(q
−1
) = 1+ a
1
q
−1
+ ... + a
n
a
q
−n
a
(2)
a
i
∈ [a
i
,a
i
],1 ≤ i ≤ n
a
B(q
−1
) = b
0
q
−1
+ b
1
q
−2
+ ... + b
n
b
q
−(n
b
+1)
(3)
b
j
∈ [b
j
,b
j
],0 ≤ j ≤ n
b
∆(q
−1
) = 1 − q
−1
(4)
Then, equation 1 can be transformed using the ob-
server canonical form into a state space model as fol-
lows:
∆x(k+ 1) = F∆x(k) + G∆u(k) (5a)
∆y(k) = H∆x(k) (5b)
where ∆x(k) is an n
a
dimensional vector and F, G and
H are represented by the following matrices:
F =
−a
1
1 0 ··· 0
−a
2
0 1 ··· 0
.
.
.
.
.
.
.
.
.
.
.
.
−a
n
a
−1
0 0 ··· 1
−a
n
a
0 0 ··· 0
, G =
b
0
b
1
.
.
.
b
n
a
−2
b
n
a
−1
(6a)
H =
n
a
z }| {
1 0 ··· 0
(6b)
where b
i
= 0 for i > n
b
. Consequently, we can obtain
using equation 5 the following state deviation at k+ j
time:
∆x(k+ j|k) = F
j
∆x(k) +
j
∑
i=1
F
j−i
G∆u(k+ i− 1) (7)
Then, it follows from equations 5 and 7, that the
j-step ahead output predicted value is given by:
y(k+ j|k) = y(k) +
j
∑
i=1
HF
i
∆x(k)
+
j
∑
i=1
j−i
∑
l=0
HF
l
G∆u(k+ i− 1)
(8)
Moreover, the cost function is defined by the follow-
ing equation:
J =
H
p
∑
i=1
(y(k+ i|k) − w(k + i))
2
+ λ
H
c
∑
i=1
∆u(k+ i− 1)
2
(9)
The output sequence on H
p
prediction horizon can
be written as follows:
Y = L
u
∆U + f (10)
where:
Y = [y(k+ 1|k),y(k + 2|k),..., y(k+ H
p
|k)]
T
∆U = [∆u(k),∆u(k + 1),...,∆u(k+ H
c
− 1)]
T
The L
u
with the (H
p
,H
c
) dimension and f which
is an (H
p
) dimensional vector are given by:
L
u
=
HG 0 ... 0
HG+HFG HG 0 ... 0
HG+HFG+HF
2
G HG+HFG
.
.
.
0
HG
.
.
.
.
.
.
∑
H
c
+1
j=1
HF
j−1
G ... HG+HFG
EFFICIENT IMPLEMENTATION OF CONSTRAINED ROBUST MODEL PREDICTIVE CONTROL USING A STATE
SPACE MODEL
117

f =
y(k)
y(k)
y(k)
.
.
.
y(k)
+
HF
HF + HF
2
HF + HF
2
+ HF
3
.
.
.
∑
H
p
i=1
HF
i
∆x(k)
Hence, the cost function of equation 9 is equivalent
to:
J = (Y −W)
T
(Y −W) + λ∆U
T
∆U (11)
where Y is given by equation 10, λ is the weighting
factor and W is the sequence of set-points on H
p
pre-
diction horizon:
W = [w(k+ 1),...,w(k+ H
p
)]
T
3 PROBLEM STATEMENT
The strategy used to find the optimal control law is
the minimization of the worst case objective function.
The min-max problem is the following:
min
∆U(k)∈M
max
a
i
∈[a
i
,a
i
]
b
j
∈[b
j
,b
j
]
J(∆U,a
i
,b
j
) (12)
where J is given by equation 11 and the set M repre-
sents the set of constraints on input and input devia-
tion signals which can be described by: M = {∀∆U :
C∆U ≤ D} (Ramirez et al., 2002).
The maximization is over the bounds of A and
B polynomial coefficients. This maximization would
lead to a worst case value of J over all the values of
a
i
and b
j
belonging respectively to [a
i
,a
i
] and [b
j
,b
j
]
(Bouzouita et al., 2007). Therefore, it is deduced from
equations 10 and 11, that the objective function J is
non convex relatively to F, G and ∆U (see section 5
for more details). Hence, it is non convex relatively
to the uncertain parameters a
i
and b
j
. Effective al-
gorithm is proposed in the present paper to solve this
maximization problem and obtain the global optimal-
ity within a good precision. The main idea of the
GGP is to convexify the objective function and the
constraints by applying different variable transforma-
tion techniques. Furthermore, this worst case value
is minimized over present and future control moves
△U = [△u(k), ..., △u(k + H
c
− 1)]. We present now
the global optimization method (GGP) which allows
us to solve the maximization problem of equation 12.
This optimization problem can be converted to the
given one:
min
a
i
∈[a
i
,a
i
]
b
j
∈[b
j
,b
j
]
−J(∆U, a
i
,b
j
) (13)
Generalized geometric programming is an optimiza-
tion technique for solving a class of non convex
non linear programming problems (Tsai et al., 2007).
The GGP problems occur frequently in engineering
design, chemical process industry and management
(Tsai, 2009), (Nand, 1995), (Chul and Dennis, 1996),
(Maranas and Floudas, 1997) and (Porn et al., 2007).
This class concerns the optimization problems with
the objective function and constraints are in polyno-
mial forms. Several specialized approaches have been
proposed to locate the global optimum based mainly
on variable transformations. Hence, the strategy of
this technique is to replace all non convex signomials
of the objective function with specific features into
convex terms according to some specific transforma-
tion rules which will be formulated in next section.
4 CONVEXIFICATION
STRATEGY OF THE GGP
APPROACH
The mathematical formulation of a GGP problem is
expressed as follows (Tsai, 2009):
min
X
Z(X) =
T
0
∑
j=1
c
j
z
j
(14)
subject to:
T
k
∑
q=1
h
k
q
z
k
q
≤ l
k
,k = 1,...,K (15a)
z
p
= x
α
p
1
1
x
α
p
2
2
...x
α
p
n
n
, p = 1,...,T
0
, (15b)
z
k
q
= x
β
k
q
1
1
x
β
k
q
2
2
...x
β
k
q
n
n
,k = 1,...,K,q = 1,... ,T
k
(15c)
X = (x
1
,...,x
n
) (15d)
x
i
> 0 for 1 ≤ i ≤ n (15e)
x
i
≤ x
i
≤ x
i
(15f)
Following the GGP formulation, the proposed
method can be solved with only positive variables due
to the logarithmic/exponential transformation used in
the convexification strategy. Therefore, this transfor-
mation requires to replace x
i
by e
y
i
. Hence, x
i
must
be strictly positive. However, in several problems the
polynomial variables can be negative. To overcame
this limitation, a simple variable translation allows
taking into account negative variables. Consequently,
following the negative translation variable technique,
the definition set of the polynomial variable of the ob-
jective function of equation 14 is ℜ
n
+
. Using equa-
tions 14 and 15 , the polynomial can be written as
follows:
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
118

min
T
0
∑
j=1
c
j
x
α
p
1
1
x
α
p
2
2
...x
α
p
n
n
, p = 1,...,T
0
(16)
In fact, the signomial function Z(X) is a sum of mono-
mial terms f
j
(X) given by the following equation:
f
j
(X) = c
j
x
α
p
1
1
x
α
p
2
2
...x
α
p
n
n
, j = 1, . . . , T
0
(17)
Based on the given three propositions (Tsai et al.,
2007), we can judge either each monomial term of
the polynomial is convex or not.
Proposition 1. The function f(X) = cΠ
n
i=1
x
α
i
i
is
convex in ℜ
n
+
if c ≥ 0, x
i
≥ 0 and α
p
i
≤ 0 (for all
i = 1,...,n).
Proposition 2. The function f(X) = cΠ
n
i=1
x
α
i
i
is con-
vex in ℜ
n
+
if c ≤ 0, x
i
≥ 0, α
p
i
≥ 0 (for all i = 1, . . . ,n)
and (1−
∑
n
i=1
α
i
) ≥ 0.
Proposition 3. The function f(X) = cexp(r
1
x
1
+
r
2
x
2
+ . . . + r
n
x
n
) is convex in ℜ
n
+
if c ≥ 0 and r
i
∈ ℜ.
Hence, if one of the three above propositions is not
satisfied for a signomial, by applying the following
transformation rules we can convexify it:
Rule 1. If c > 0 and α
i
> 0 , then cx
α
p
1
1
x
α
p
2
2
...x
α
p
n
n
=
cexp(r
1
y
1
+ r
2
y
2
+ ... + r
n
y
n
) where y
i
= log(x
i
), i =
1,... , n.
Rule 2. If c < 0, α
i
> 0 and
∑
n
i=1
α
i
> 1,
then cx
α
p
1
1
x
α
p
2
2
...x
α
p
n
n
= cX
α
1
/R
1
...X
α
m
/R
m
where x
i
=
X
1/R
i
, i = 1, . . . , n and R =
∑
n
i=1
α
i
.
5 SUMMARY OF THE STATE
SPACE RMPC ALGORITHM
In this section, we provide a summary of the needed
steps to find the optimal control law using the new
proposed RMPC method in the state space model:
1. Fix the upper and lower bounds of a
i
and b
j
which
are a
i
, a
i
(i = 1,...,n
a
), b
j
and b
j
(j = 0,...,n
b
).
Several works have been published addressing
facets of finding model uncertainty bounds (Mes-
saoud and Akoum, 2000), (Messaoud and Favier,
1994).
2. Find the optimum values of a
i
and b
j
by solving
the minimization optimization problem of equa-
tion 13. This problem is initially non convex.
By applying the transformation techniques (ex-
ponential and power transformations) of the GGP
method, the transformed problem (objective func-
tion and constraints) becomes convex. The GGP
technique is applied with a polynomial form.
3. Find ∆U, the solution of the minimization prob-
lem of equation 12 with the optimal values of a
i
and b
j
found in step 2.
4. Inject the control action in the plant to find the
state and the output actions of the future se-
quences.
5. Go to step 2 and repeat with the optimal value of
the control signal found in step 3.
To explain more step 2, we consider a simple ex-
ample where the state matrix is F = −a
1
, the input
matrix is G = b
0
and the output matrix is H = 1. The
controller parameters are: H
p
= 1, H
c
= 1 and λ = 1.
Then using equations 8 and 9, the criterion J is written
as following:
J = (y(k) − a
1
∆x(k) + b
0
∆u(k) − w(k+ 1))
2
+ ∆u(k)
2
(18)
Consequently, after expanding equation 18, we
observe that the J criterion is non convex relatively to
x
1
, x
2
and x
3
(according to proposition 1 and proposi-
tion 2).
6 SIMULATION EXAMPLES
In this section, the new RMPC method using state
space description and based on GGP will be illus-
trated through two examples.
6.1 Example 1
The first example is a simple system described by the
discrete state model given by equation 5, where the
state matrices are:
F = −a
1
,G = 0.11 and H = 1
The uncertain variable bounds are:
−1.6 ≤ a
1
≤ −1.2
This system is unstable for all values of a
1
. The initial
state points is fixed at x(0) = x(1) = 0. We consider
the following control parameters: H
p
= 3, H
c
= 1 and
λ = 0.02. The set-point is changed between 1 and −1.
Moreover, constraints on control and control moves
signals process have been taken into account. Their
values are: −3.5 ≤ u(k) ≤ 2.3 and −1.5 ≤ ∆u(k) ≤
1.5. For model 1, a
1
= −1 and for model 2, a
1
=
−1.2.
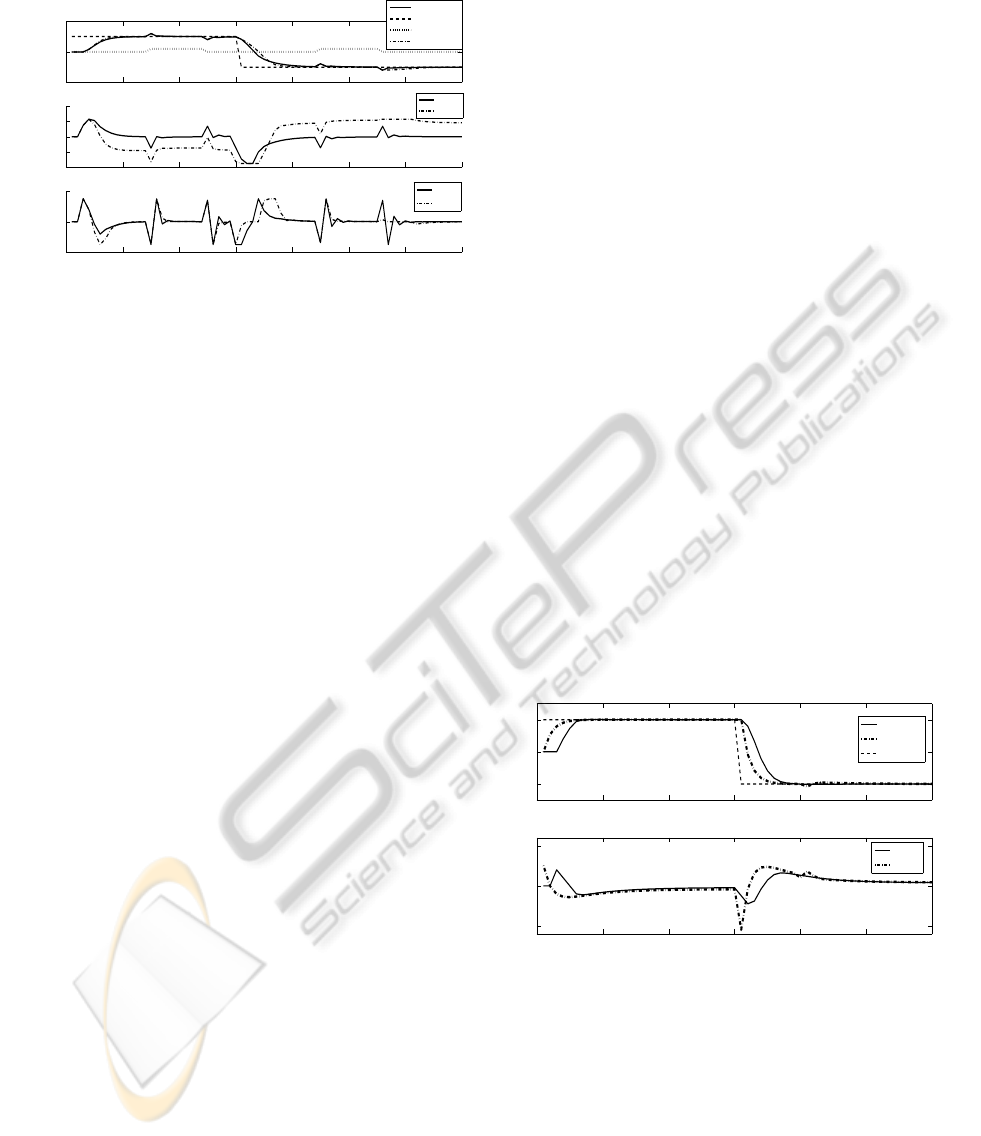
Fig. 1 shows the closed loop response of the sys-
tem for the two models using the proposed state space
RMPC approach based on the GGP technique. A load
disturbance is added to the model output. This dis-
turbance takes 0.2 for 15 ≤ k ≤ 25 and 45 ≤ k ≤ 55
EFFICIENT IMPLEMENTATION OF CONSTRAINED ROBUST MODEL PREDICTIVE CONTROL USING A STATE
SPACE MODEL
119
0 10 20 30 40 50 60 70
−2
0
2
Output
0 10 20 30 40 50 60 70
−4
−2
0
2
4
Input
0 10 20 30 40 50 60 70
−2
0
2
Time (sec)
Input deviation
Model 1
Set−point
Disturbance
Model 2
Model 1
Model 2
Model 1
Model 2
Figure 1: Closed-loop simulation results for model 1 and
model 2.
and 0 else. The simulation results show good perfor-
mances of the proposed approach. This approach suc-
cessfully controls the above system. It achieves vari-
able set point tracking and non zero disturbance re-
jection with respect to input and input deviation con-
straints. Moreover, the on-line optimization algorithm
takes about 0.17s per sample time. Consequently, the
proposed technique is accomplished in a reasonable
amount of time.
6.2 Example 2: Comparison with
Pannochia Method
In this example, we consider a jacketed continuous
stirred tank reactor (CSTR) presented by Henson and
Seborg (Henson and Seborg, 1997). After lineariza-
tion around the middle-conversionopen-loop unstable
steady-state and discretization with a sampling time
of 5s (Pannochia, 2004), we obtain the following state
space model matrices:
F =
−a
1
1
−a
2
0
, G =
b
0
b
1
H =
1 0
where the uncertainty variables are bounded as fol-
lows: −2.3006 ≤ a
1
≤ −2.1617, 1.1555 ≤ a
2
≤
1.2863, 0.2022 ≤ b
0
≤ 0.2153 −0.1804 ≤ b
1
≤
−0.1718. Model 1 is described by the following state
matrices:
F
1
=
2.1617 1
−1.1555 0
, G
1
=
0.2022
−0.1718
H
1
=
1 0
However, for model 2 we consider the following
state matrices:
F
2
=
2.3006 1
−1.2863 0
, G
2
=
0.2153
−0.1804
H
2
=
1 0
Fig.2 compares the closed loop performances of
the proposed optimization algorithm using GGP tech-
nique and the RMPC method presented by (Pan-
nochia, 2004) using the above system for the two
models. The control parameters are the following:
H
c
= 2, λ = 0.002. In the proposed approach H
p
= 3.
The initial state is x=
0
0
. Inputs constraints are
fixed as follows: −10 ≤ u(k) ≤ 10. In the proposed
approach, we suppose that the future set-points are
unknown. Moreover, the two models are considered:
for 1 ≤ i < 40 the true system is model 1
for i ≥ 40 the true system is model 2
Fig.2 shows a slightly difference between the two
outputs. The response time of the Pannochia RMPC
method is about t
r
= 4.87s , however the one of the
proposed RMPC method is t
r
= 6.1s. Concerning
the control signal, the proposed RMPC method shows
less oscillations at the set point variations than the
Pannochia RMPC method since it presents less of
peaks.
(Pannochia, 2004) uses two algorithms: an off-
line algorithm and an on-line one. The off-line algo-
rithm computes a nominal system and a feedback gain
design which guarantees the closed loop system sta-
bility. This algorithm solves a non convex min-max
optimization problem. Hence, both the minimization
and the maximization problem give local solutions. In
fact, this limitation can affect the closed loop perfor-
mance responses. However, The proposed approach
uses only one on-line algorithm based on the GGP
method which is a global optimization technique for
non convex polynomial functions.
0 10 20 30 40 50 60
−1
0
1
Output signal
0 10 20 30 40 50 60
−5
0
5
Input signal
Time (sec)
GGP
RMPC
Set−point
GGP
RMPC
Figure 2: Closed-loop simulation results for models 1 and
2.
7 CONCLUSIONS
An examination of the closed loop performances of
a new approach in constrained state space Robust
Model Predictive Control (RMPC) in the presence of
parametric uncertainties is presented. Based on sim-
ulation example results, we have shown that the pro-
posed method is able to guarantee variable set-point
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
120

tracking respecting to the input and input deviation
constraints and to reject non zero disturbance. More-
over, our method features good performances in the
on-line algorithm time computation and a simplicity
of implementation. These features make this method
particulary attractive for industrial applications. A
comparison with a recent state space RMPC method
is also given.
ACKNOWLEDGEMENTS
I warmly thank my colleague Baddreddine Bouzouita
for his helpful comments.
REFERENCES
Alamo, T., Ramirez, D., and Camacho, E. (2004). Effi-
cient implementation of constrained min-max model
predictive control with bounded uncertainties: a ver-
tex rejection approach. Journal of Process Control, 15
(2005):149–158.
Bouzouita, B., Bouani, F., and Ksouri, M. (2007). Solving
non convex min-max predictive controller. In Confer-
ence Proceedings of 2007 Information, Decision and
Control, Adelaide.
Camacho, E. and Bordons, C. (2004). Model Predictive
Control. Springer, London.
Campo, P. and Morari, M. (1987). Robust model predictive
control. In American control conference, pages 1021–
1026.
Chul, C. and Dennis, L. (1996). Effectiveness of a ge-
ometric programming algorithm for optimization of
machining economics models. Computers and opera-
tions research, 23:957–961.
Cordon, P. and Boucher, P. (1994). Multivariable gener-
alized predictive control with new multiple reference
model: a robust stability analysis. Mathematics and
computers in simulation, 37:207–219.
Fukushima, H., Kim, T., and Sugie, T. (2007). Adaptive
model predictive control for a class of constrained lin-
ear systems based on comparison model. Automatica,
43 (2):301–308.
Henson, M. and Seborg, D. (1997). Non linear Process
Control. Prentice Hall.
Huaizhong, L., Niculescu, S., Dugard, L., and Dion, J.
(1998). Robust guaranteed cost control of uncer-
tain linear time-delay systems using dynamic output
feedback. Mathematics and computers in simulation,
45:3–4.
Kothare, M., Balakrishnan, V., and Morari, M. (1996). Ro-
bust constrained model predictive control using linear
matrix inequalities. Automatica, 32 (10):1361–1379.
Lee, Y. and Kouvaritakis, B. (2000). A linear program-
ming approach to constrained robust predictive con-
trol. IEEE Trans. Auto. Contr., 45:1765–1770.
Maranas, C. and Floudas, C. (1997). Global optimization in
generalized geometric programming. Computers and
chemical engineering, 21:351–369.
Mayne, D., Rakovic, S., Findeisen, R., and Allgower, F.
(2009). Robust output feedback model predictive con-
trol of constrained linear systems: Time varying case.
Automatica, 45:2082–2087.
Messaoud, H. and Akoum, Z. (2000). An algorithm for
computing parameter bounds using prior information
on physical parameter bounds. In 7th conference
on Electronics, Circuits and Systems (ICECS), pages
218–221.
Messaoud, H. and Favier, G. (1994). Recursive determina-
tion of parameter uncertainty intervals for linear mod-
els with unknown but bounded errors. In 10th IFAC
Symp. on SYSID, Copenhagen, Denmark, pages 365–
370.
Nand, K. (1995). Geometric programming based robot con-
trol design. Computers and industrial engineering,
29:631–635.
Pannochia, G. (2004). Robust model predictive control with
guaranteed set point tracking. Journal of process con-
trol, 14 (2004):927–937.
Porn, R., Bjork, K., and Westerlund, T. (2007). Global so-
lution of optimization problems with signomial parts.
Discrete optimization, 5:108–120.
Qian, W., Liu, J., Sun, Y., and Fei, S. (2010). A less con-
servative robust stability criteria for uncertain neutral
systems with mixed delays. Mathematics and comput-
ers in simulation, 80:1007–1017.
Ramirez, D., Alamo, T., , and Camacho, E. (2002). Effe-
cient implementation of constrained min-max model
predictive control with bounded uncertainties. In Con-
ference on decision and control.
Rossiter, J. and Kouvaritakis, B. (1998). Youla parame-
ter and robust predictive control with constraints han-
dling. In Workshop on Non linear Predictive Control
,Ascona, Switzerland.
Tsai, J. (2009). Treating free variables in generalized geo-
metric programming problems. Computers and chem-
ical engineering, 33:239–243.
Tsai, J., Lin, M., and Hu, Y. (2007). On generalized
geometric programming problems with non positive
variables. European journal of operational research,
178:10–19.
Watanabet, K., Ikeda, K., Fukuda, T., and Tzafestas, S.
(1991). Adaptive generalized predictive control us-
ing a state space approach. In International workshop
on intelligent robots and systems IROS, Osaka, Japan.
EFFICIENT IMPLEMENTATION OF CONSTRAINED ROBUST MODEL PREDICTIVE CONTROL USING A STATE
SPACE MODEL
121
