
MIXED COLOR/LEVEL LINES AND THEIR
STEREO-MATCHING WITH A MODIFIED
HAUSDORFF DISTANCE
Noppon Lertchuwongsa, Michèle Gouiffès and Bertrand Zavidovique
IEF, Institut d’ Electronique Fondamentale, CNRS 8622, Université Paris Sud 11, Paris, France
Keywords: Computer Vision, Stereovision, Color Lines, Hausdorff, Shape Matching.
Abstract: Level lines and sets are competitive features to support recognition. Color is assumed more informative than
intensity, so color-lines are preferred to exhibit the set basis. In the paper, they are defined after level lines,
and then extracted and characterize. Greater information is kept by color lines resulting into more efficient
grouping towards objects. A novel Hausdorff-inspired disparity finder is introduced fed in by color lines
with respect to epipolar constraints. The efficient disparity map resulting from pixel wise line-matching
between left and right images justifies our technical choices.
1 INTRODUCTION
Usual segmentation appears sensitive in practice to
the view point and shadows (contrast changes). In
this paper, morphologically stable sets are extracted
and a Hausdorff distance provides for global and
local pattern matching all in once. Level sets make a
basis - the topographic map - easy to compute.
According to psychologists (Koschan a Abidi
2008), in most contexts color prevails on shape and
texture: whence using color to make lines more
distinctive seems sensible.
Defining color sets and lines is not
straightforward because of the intrinsic tri-
dimensional nature of color. Usually, color data are
transformed from a 3D color space to a 1D Level
Space, by combining the three components, either to
specify a total order of colors or towards some
optimal function of those. Here, our of the
commonly used HSV space, the 1D level space is
provided by a mixture of H and V weighted by S.
After mixture line features have been extracted from
two images to compare, matching is carried out with
a coarse to fine strategy involving a modified
Hausdorff distance (Huttenlocher 1993), to pair
portions of lines.
As the disparity in stereoscopic images is
computed from the distance of corresponding points,
results of stereo shape matching and their
comparison with the ground truth will assert the
efficiency of our matching process, founding the
algorithm evaluation.
The paper is organized as follows. Section 2 is a
brief reminder on lines, color and matching for
notations and basic algorithms. Section 3 details our
procedure to enhance intensity lines into color lines.
Then, Section 4 deals with pattern and point
selections for matching towards disparity from line
pairing. Finally, the validity and efficiency of the
proposed procedure are evaluated through
comparing our depth map with the ground truth.
2 BIBLIOGRAPHY
Level sets and lines. Level sets (Caselles 1999), the
topographic map, prove invariant to contrast changes
and naturally robust to occlusions. Converting
images into sets and back is straightforward.
Projections follow equation (1) or (2)
)(,
)(,
2
2
xuxX
xuxX
(1)
(2)
where u(x) is the gray level at pixel x in the image
and λ is the parameter – threshold – defining the
lower (resp. upper) set X
λ
(resp. X
λ
). reconstruction
follows equations (3)
(3)
A level line is the border of a level set, therefore
parameterized by the same λ. In practice it still
depends on the threshold’s step: as it is usually low
}{sup}{inf
λ
Xλ,u=Xλ,u=xu
122
Lertchuwongsa N., Gouiffès M. and Zavidovique B. (2010).
MIXED COLOR/LEVEL LINES AND THEIR STEREO-MATCHING WITH A MODIFIED HAUSDORFF DISTANCE.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 122-127
DOI: 10.5220/0002948501220127
Copyright
c
SciTePress

valued in hope of an exhaustive topographic map,
images generate more lines than necessary to
matching. Color is likely to improve a priori the line
separability then lowering their number.
Color Edges and Lines. Color was first proved to
extend the notion of topographic map by (Coll &
Froment 2000) who designs a total order in the HSV
space. Gouiffès (2008) proposed to extract color sets
from color bodies in the RGB 3-D histogram.
Moreover the Hue in HSV proves ultimately
discriminative and invariant to shadow, however it is
ill-defined at low saturation. Compared to gray level,
color provides more edge or line information.
Feature matching. Set-correspondence finding
between two images can be classified into three
principal algorithmic lines: Point matching, based on
correlation windows on raw intensity data, but suffer
on homogeneous areas. Geometrical Feature
matching are the corners or curvature points or line
segments with attributes. Region and shape
matching strategies. The hypothesis is made here
that corresponding patterns maintain the shape
between images (Loncaric 1998).
The method we detail in the present paper
exploits the shape stability granted by the invariance
to contrast through color sets.
3 COLOR SETS AND LINES
3.1 Color Sets
Color image data can be represented in the RGB
cube. The pixel intensity – i.e. level – amounts to
projecting the given RGB point onto the principal
diagonal of the cube (the gray level scale). The
question then arises to find a transformation more
adaptive to the image content. Gouiffes &
Zavidovique (2008) proposed to use the dichromatic
model to find body colors: vectors pointing to
principal body colors are used separately instead of
the sole cube diagonal. Related data – i.e. close
enough in the RGB space – is projected onto that
vector exhibiting associated level sets.
Our leading idea to build the transformation of
the HSV color space into a 1-D level space takes
after the vanishing of Hue, independently at both
low light intensity and low saturation.
3.2 H,V Mixtures vs. S
Considering the above-mentioned drawbacks of the
HSV space, the following formulation of S is
preferred:
(,,) (,,)S=MaxRGB MinRGB
(4)
Second, we propose to use hue when it is
relevant(high saturation) and intensity otherwise
(low saturation). To ensure color sets homogeneous
enough respective to what is expected from regions
in image segmentation, we design a smooth
transition with a sigmoid function Sig(s,k):
() (,) () (1 (,))()
F
Op SigskHp SigskIp
(5)
Sig(s,k) is thus parameterized by its slope s and
inflection point k to be adapted from former and
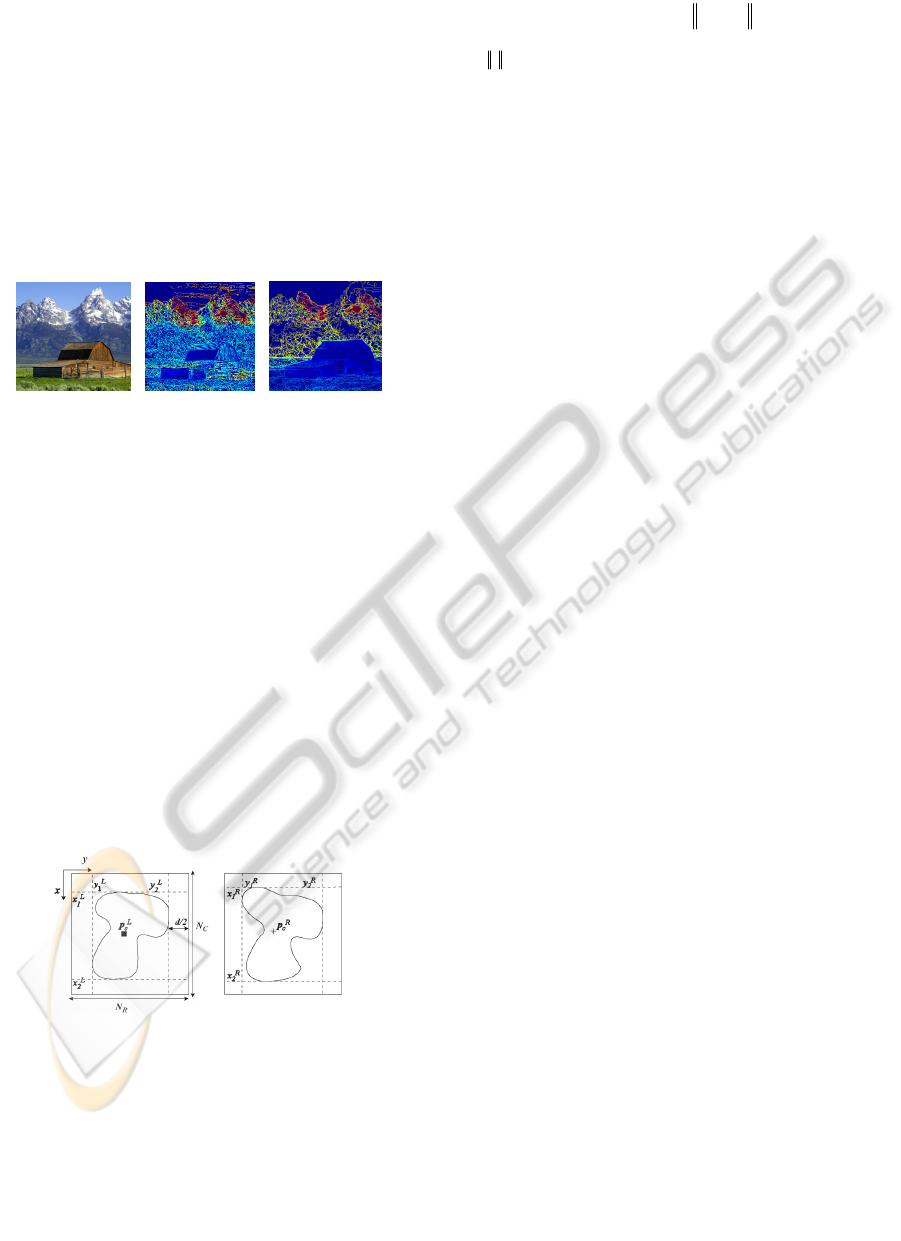
Figure 1: (a) Original image, (b) pseudo-color image in the
data space from the step function O
F
and threshold on
intensity, (c) pseudo-color image in the data space from
the sigmoid mixture O
F
and a threshold on intensity, (d)
pseudo-color image from the same data space and a
threshold on magnitude of the saturation, both (b) (c) and
(d) use same scale of pseudo color.
Fig 1 compares the use of a sigmoid (Fig. 1(c)) is
compared with the use of a Heaviside step function
(see Fig 1 (b)). On top of regular noise, the artifacts
of the step function are likely due to the frequency
of switches between the intensity and hue scales
when saturation lies in around the threshold. The
overall consequence is a loss of some details when
trying to lower the effect. The drawback of the
sigmoid function, compared to the step function, is
conversely its smoothness. When saturation is low,
although hue does not keep much of an effect, a
change of the RGB vector even to a close one might
result into significant modification of the final result
O
F
due to the small signal situation. Pepper noise
can occur on the image during the transition of the
Sig function around point k. Fig.1(c) finally
illustrates that issue: for example, on the road area,
the wall of the restaurant, or among the crowd, the
(a) (b)
(c) (d)
MIXED COLOR/LEVEL LINES AND THEIR STEREO-MATCHING WITH A MODIFIED HAUSDORFF DISTANCE
123
sigmoid combination outputs some sparse noise.
Sharpening the sigmoid to make it closer to a
step function will reduce details. Since, again, the
sigmoid is more biased by the hue and is exactly
used to take advantage from it, the inflection point k
is set to a low value. Figure 1(d) shows better results
in that respect thanks to replacing the usual formula
of the saturation – a ratio – by the difference version
given in equation (4). Finally, Fig. 2 compares our
lines with the classical gray level lines.
Our line extraction method derives from the one
proposed by Bouchafa (2006) to direct close curve
extraction.
(a) (b) (c)
Figure 2: (a) Original color image, (b) gray level lines, (c)
color lines. Note that (b) and (c) result from a same
artificial look-up table to make lines more distinct.
4 COLOR LINE MATCHING
To speed the match up, our method begins to sort
patterns by global features for a coarse stage. Then,
at the fine stage, point matching is performed.
Coarse Scale Matching. Techniques of comparing
border of sets between 2 shapes, such as, length,
level of set, standard deviation and position shape,
which is exploited from stereo vision knowledge.
Fine Matching. Published techniques relying on a
reference point, e.g. Chang (1991), strongly depend
on this point stability.
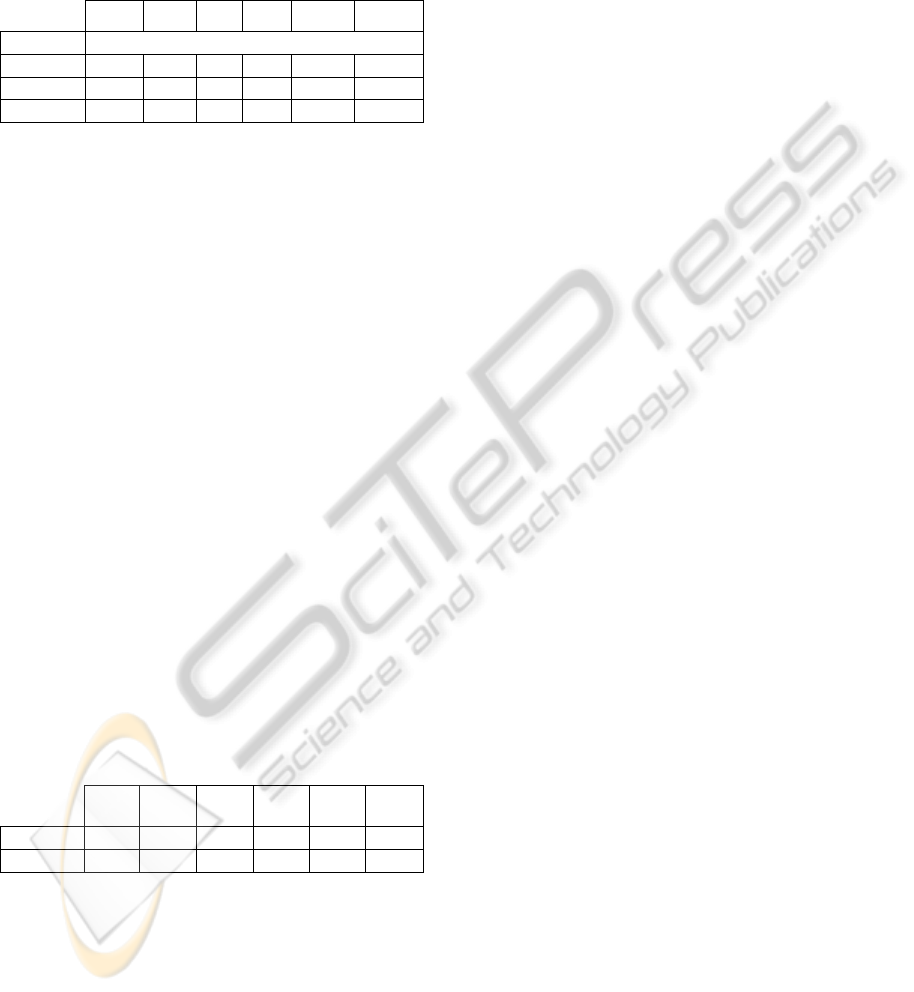
(a) (b)
Figure 3: Example of corresponding sets A and B and their
centroids and notations.
The Hausdorff distance founds an interesting
technique to get the process free from the center. Let
A = {a
1
,...,a
n
} and B = {b
1
,...,b
m
} be two finite sets.
Their Hausdorff distance is defined as
H
A,B = Max h A,B ,h B, A
(6)
where
ij
aA bB
hA,B=MaxMina b
(7)
and is a norm in the affine space of the image.
In previous works, e.g. (Huttenlocher 1993)
Hausdorff was used to locate shapes in a scene by
using a template.
Here, a topographic map contains abundant lines
which are close together, hampering the accuracy of
the distance map in our application. Therefore a
progressive scheme is rather tried: every tentative
couple of left and right lines is extracted and
superimposed within a common window W with
center p
c
W
of coordinates (x
c
W
, y
c
W
) and of size N
R
N
C
. However, using the center of W, p
W
c
= (N
C
/2,
N
R
/2) as the reference point for mapping, two
problems occur. First, direct mapping of the centroid
of W may make some part to exceed the window.
Second, right and left patterns to be matched can be
dissimilar since they were filtered roughly, therefore
large enough space d is needed to compensate.
Thus, a slightly more elaborated shifting strategy
into W has to be designed (see Fig. 3). x
1
L
, x
2
L
, y
1
L
,
y
1
L
are the coordinates of the bounding rectangle of
the left pattern, and p
c
L
= (x
c
L
, y
c
L
)
T
is the centroid
(small square) of the line to be mapped in the
comparison. It is likely different from the center of
the window, illustrating the first problem.
Finally, both each point p
L
= (x
L
, y
L
) of L
L
and
each point p
R
=(x
R
, y
R
) of L
R
are translated into W, of
reference point p
W
= (xc
W
, yc
W
) and of size N
R
x N
C
respectively with vectors v
L
W
and v
R
W
:
TR
c
W
c
R
c
W
cRWRWRR
TL
c
W
c
L
c
W
cLWLWLL
yyxxwith
yyxxwith
),('''
),('''
vvpp
vvpp
(8)
(9)
where The new centroid p
W
c
is then defined as:
)/()(
)/()(
121
121
LLLL
c
LLLL
c
T
C
R
W
c
W
cW
c
yyyy
xxxx
N
N
y
x
p
(10)
(11)
and comparison window is the rectangle N
R
x N
C
:
dyyN
dxxN
LL
C
LL
R
12
12
(12)
(13)
where d is the extension of the window from the size
of the line
Note that, according to the stereovision
application targeted in our paper, we assume that the
epipolar constraint holds, Therefore, the translation
on row x is similar in v'
L
W
and v'
R
W
. This assumption
reduces significantly the complexity of the
Hausdorff matching so made one-dimensional. After
shifting the selected left line L
L
to W (equation (8))
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
124

the distance map is computed with a city block
distance. Then, candidate samples of right lines are
mapped to W – equations (8,9) – and the Hausdorff
distance is computed for all right line candidates in
C
R
as resulting from the coarse scale matching. The
final homologous line is the line which provides the
minimum Hausdorff distance - equation (6) .
Indeed, when finding the point-to-point or line-
to-point distances, we use their minimum. Pattern-
to-pattern distances, i.e. set of points to set of points,
result from the furthest of those closest points. When
a pattern is selected by the Hausdorff’s condition, all
points in the set will find their corresponding part.
T
y
is the translation vector bound to the
minimum Hausdorff distance (see Fig. 4), and d
y
is
the local Hausdorff vector between corresponding
columns of points p'
L
and p'
R
(respectively y'
R
and
y'
L
). The disparity D of corresponding points p
L
and
p
R
is obtained from the stereo pair, following:
yy
dTp
R
c
L
c
RLL
yyyyD )(
(14)
Note that the disparity value is computed at all
sample points of a line.
(a) (b)
Figure 4: (a) Right line L
R
(dotted line), superimposed on
L
L
(continuous line) when L
R
was firstly projected into W
which already had L
L
as distance map, centroid of L
R
is
marked as
p
c
R
. (b) The Hausdorff method makes L
R
translate to new centroid
q
c
R
= p
c
R
+T
y
. Finally, the vector
d
y
goes from p'
R
+T
y
to p'
L
.
Decomposing Lines. A single global distance to all
points corresponds to a simple linear transformation
between homologous points. Indeed, one region or
line can relate to several depths. Also, one line likely
refers to several objects at different depths. Rather
than a complicate set of equations, the line can be
decomposed into portions where the rigid motion
applies well enough.
In figure 5, the line points extracted from the
right image of a stereoscopic pair (red crosses)
superimpose with the left line from the distance
map. Blue means close and the redder the further.
Let us call "centroid match" the process where
the two centroids are superposed first and then the
result for every pair of corresponding points is
computed.
In fig.5 (a) the centroid match leads to large
distances between corresponding points, up to
missing corresponding points on the right border of
the right leg (reader’s right) that are paired with the
left border of the right leg. In Fig. 5(b) Hausdorff
makes both lines have correct co-points, generally
better than before. The distance of corresponding
points is reduced; however there are still some
misfits in the tail (right area of the deer). Finally,
Fig. 5(c) illustrates our technique. Obviously, the
number of mismatched points was efficiently
reduced. Fig. 6 shows some enlarged details of the
points matching.
(a) (b) (c)
Figure 5: Illustration of the matching procedure. Right
lines' (Red Cross symbol) superimposed on left lines'
distance map (dark). (a) lines based on the same centroid
at the center window, (b) lines after optimal Hausdorff
translation, (c) result of the proposed method.
(a) (b)
Figure 6: (a) Enlarged version of the leg part in figure 17:
left, centroid matching; right, modified Hausdorff. (b)
close up on the tail part of figure 17: left, general
Hausdorff, to compare with right, modified Hausdorff.
5 EXPERIMENT AND RESULTS
Color lines are evaluated first in comparing with
gray level lines. They are then used to evaluate the
efficiency of the modified Hausdorff distance. This
distance is compared to classical line matching
methods through the stereo matching quality for
both color and gray lines. The database, 2003-2006,
in
Scharstein (2003, 2007) and Hirschmüller (2007) is our
test bench.
5.1 Contribution of the Color Lines
The relevance of our color mixture lines wrt. gray
level lines, is indicated by two criteria: 1) the
number of lines, compactness of the topographic
map. 2) The average PSNR values and number of
lines computed on the image data base are collected
in the table 1. Three different data are considered:
MIXED COLOR/LEVEL LINES AND THEIR STEREO-MATCHING WITH A MODIFIED HAUSDORFF DISTANCE
125

gray, abrupt mixture, and sigmoid.
is the
quantization step, both PSNR and “line number” are
decreasing functions of
. k sets the mix (section 3).
From the analysis of the table 1, we can note that
the PSNR for the sigmoid mixture is lower than with
Gray lines except when the saturation is greater than
or equal to 0,4. The number of lines is appreciably
lower in same conditions. That means images
reconstructed from a topographic map after smooth-
mixture are closer to the input image, while the
topographic map is more compact. Fig. 7 shows
examples of level and color sets.
Table1: Comparison results between images after color
mixture data and gray level ones: average PSNR of each
kind of data and the average number of lines.
k
PSNR
Gray 1 - 42.33 36474.30
2 - 37.97 29234.31
5 - 31.19 18666.96
1
0.1 36.46 29378.13
0.2 38.15 30617.52
0.4 42.53 33416.48
2
0.1 32.63 20784.17
0.2 34.41 22332.59
0.4 38.68 25575.09
5
0.1 27.97 11498.09
0.2 29.77 12779.41
0.4 33.51 15507.00
Nb. lines .
Sigmoid method
Figure 7: Examples of level and color sets: (a) Original
color image, (b) Pseudo color image of gray level sets, (c)
Pseudo color image of sigmoid color set: for all pseudo
color images the step parameter is set equal to 5, the
amplitude is coded on 8 bits and k = 0,2 for the mixture.
Line images are shown in Fig. 8. As expected, many
lines appear on colorimetrically homogeneous
objects. Shadows produce lots of irrelevant lines,
unstable for matching since they do not correspond
to real objects. With the sigmoid mixture, the
topographic maps are more compact and lines
correspond to salient physical items at sight.
This preliminary experimental evaluation
suggests that our HSV mixture produces lines more
appropriate for matching, i.e. more distinctive,
quicker to compute, and more related to object-
boundaries.
5.2 Matching Results
Figure 9 shows an example of results of our
disparity computation method and figure 13 displays
the error from the ground truth in every pixel. Most
matching errors occur for large color lines related to
several objects at different depths.
In Table 2 , N
T
refers to the average number of
line points computed in the whole data base. N
C
is
the number of correct points, those for which the
disparity error is less than 5. E
T
stands for the mean
disparity error computed on the N
T
points and E
C
same on the N
C
points.
(a) (b)
(c) (d)
Figure 8: Examples of lines from the stereo pair of Fig.7.
Step
is set to 2, and the inflection point k is 0.2. (a), (b)
are the gray level lines in left and right images
respectively, (c) (d): Lines from sigmoid mixture.
The parameter %D
E>5
(resp.%D
E>1
) is the
percentage of points with a disparity error
nr
xy
D
x, y D x, y
n
greater than 5 pixels (resp. 1
pixel), D
n
(x,y) being the disparity after our method
at pixel (x,y) and D
r
(x,y) the truth after the data
base; n is the number of pixels.
(a) (b) (c)
Figure 9: Example of matching: (a), (b) left and right
stereoscopic images, (c) the disparity-line image and its
color map value.
These criteria are computed for the Hausdorff
distance and the centroid method. The Hausdorff
method is used with gray and Sigmoid Mixture data
(the parameter that we use is T
S
= 0.2). Out of table
2, gray level data yields a larger number of points
than the mixture in same technical conditions.
Most added points are not salient and those from
shadow lines are unstable. Consequently, 19,3% of
the gray lines have not been correctly matched,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
126
compared to only 13 % for the mixture lines. Too
large a number of lines is also problematic in terms
of computation times and resources. Eventually,
disparity errors are always lower from mixture lines.
Table 2: Comparison of the results provided by the
Hausdorff matching and classical centroid line matching.
N
T
N
C
E
T
E
C
%D
E>5
%D
E>1
Hausdor
Gray
6092 497
4,9
0,7
18 54
Mixture
3585 313 4,0 0,6
13,51 50,63
Centroid
3892 289 6,9 1,0
28,07 67,73
For comparison purposes, Table 2 collects also
results from the Centroid technique on mixture data.
N
T
is normalized to find a number of lines
comparable to Hausdorff’s by controlling the T
a
threshold of acceptable data as defined in section 4.
Even if T
a
is adjusted in the Hausdorff case, it could
only worsen results since the matching condition
states that a tighter threshold means more similar
patterns. T
a
depends on the line length not on the
type of input data. Then on the same image sub-part,
26,6 % of the lines have not been correctly matched.
Moreover, the errors E
T
and E
C
are significantly
higher than Hausdorff ‘s (E
T
: 69% and E
C
: 59%).
The same N
T
value is kept for gray vs. mixture
lines not to bias results (same technique and
parameters).
Contribution of the Modified Hausdorff Distance.
Table 3 compares the classical and modified
Hausdorff distances for the color mixture. In the
latter case, lines are divided if their length is higher
than an experimentally set threshold T
1
, the value of
which depends on the image size through natural
stretching and shrinking in stereo (T
1
=500 in our
experiments). Same measures as before are collected
Table 3: Comparison of classical Hausdorff techniques
and modified techniques.
N
T
N
C
E
T
E
C
%D
E>5
%D
E>1
Classical 23185 18621 3,5744 1,0840 21,01 65,53
Modified 24585 21357 3,1402 0,8753 14,22 60
Because these techniques are based on a different
Hausdorff matching, the threshold of acceptable data
Ta is separately chosen to reach the same level of
details in the disparity image.
According to table 3, the classical Hausdorff
method yields a smaller number of points which
means less detail compared to the modified
Hausdorff. It produces even a smaller number of
points, N
C
, for which the disparity error is less than
5. Nevertheless, the average error E
C
(Column 4) is
3,57 pixels for the global Hausdorff and only 3,14
pixels for the modified version. Likewise, the rate
%D
E>5
in column 5 is 21,01% vs.14,22%, meaning
that 79% of the lines are correctly matched by the
classical approach, while 85,8% are correctly
matched with the modified version. And finally,
Table 3 also shows that the disparity errors are
always lower with the modified Hausdorff distance.
6 CONCLUSIONS
Our work studies color line matching and evaluates
its relevance in a stereo matching application. A
novel color topographic map is proposed with less
irrelevant lines, more related to objects and more
distinctive. Direct close curve extraction based on
the color map reduces the memory and CPU greed.
Color sets finally prove more stable in practice than
usual results of region segmentation. The proposed
modified Hausdorff shows its efficiency in finding
more accurate correspondences for image
registration.
REFERENCES
Koschan & Abidi (2008). Digital color image processing.
Hoboken, N.J.: Wiley-Interscience.
Huttenlocher, Klanderman & Rucklidge (1993).
Comparing images using the Hausdorff distance.
IEEE Trans. on PAMI, Vol. 15. N° 9. pp. 850–863.
Caselles, Coll & Morel (1999).Topographics maps and
local contrast invariance in natural images. IJCV, pp.
5-27.
Coll & Froment (2000), Topographic Maps of Color
Images. In ICPR Vol. 3. p 3613. 2000.
Gouiffès & Zavidovique (2008), A Color Topographic
Map Based on the Dichromatic Reflectance Model.
Eurasip JIVC, n.17.
Loncaric (1998). A survey of shape analysis techniques.
Pattern Recognition Vol. 31, pp 983-1001.
Bouchafa & Zavidovique (2006) Efficient cumulative
matching for image registration. IVC, Elsevier Vol.
24, pp.70-79.
Chang, Hwang & Buehrer (1991) A shape recognition
scheme based on relative distances of feature points
from the centroid, Pattern Recognition, Vol. 24, N°11,
pp. 1053-1063.
Scharstein & Szeliski (2003). High-accuracy stereo depth
maps using structured light. In IEEE CVPR Vol. 1,
pp. 195-202.
Scharstein & Pal (2007). Learning conditional random
fields for stereo. In IEEE CVPR.
Hirschmüller & Scharstein (2007). Evaluation of cost
functions for stereo matching. In IEEE CVPR.
MIXED COLOR/LEVEL LINES AND THEIR STEREO-MATCHING WITH A MODIFIED HAUSDORFF DISTANCE
127
