
A
HIGHLY INTEGRATED LOW PRESSURE FLUID SERVO-VALVE
FOR APPLICATIONS IN WEARABLE ROBOTIC SYSTEMS
Michele Folgheraiter, Mathias Jordan, Luis M. Vaca Benitez, Felix Grimminger, Steffen Schmidt
Jan Albiez and Frank Kirchner
German Research Center for Artificial Intelligence (DFKI), Robotics Innovation Center
Robert-Hooke-Strasse 5D-28359 Bremen, Germany
Keywords:
Proportional Valve, Hydraulic Valve, Pneumatic Valve, Mechatronics, Pressure Control, Servo-Mechanism.
Abstract:
In this paper an innovative low pressure servo-valve is presented. The device was designed with the main
aim to be easily integrable into complex hydraulic/pneumatic actuation systems, and to operate at relatively
low pressure (< 50 · 10
5
Pa). Characteristics like compactness, lightweight, high bandwidth, and autonomous
sensory capability, where considered during the design process in order to achieve a device that fulfills the
basic requirements for a wearable robotic system. Preliminary results about the prototype performances are
presented here, in particular its dynamic behavior was measured for different working conditions, and a non-
linear model identified using a recursive Hammerstein-Wiener parameter adaptation algorithm.
1 INTRODUCTION
State of the art robots that are actuated with a hy-
draulic system are generally thought to operate with
pressures greater than 200 · 10
5
Pa (Hayward, 1994),
(Jacobsen et al., 1991). This is mainly due to the fact
that it is convenient to increase the force/weight ra-
tio of the actuation system by increasing its opera-
tional pressure (Yoshinada et al., 1992). If from one
side increasing the pressure brings advantages, from
the other could represent a limitation. At first the hy-
draulic components need to be designed to resist the
high forces generated by the fluid pressure; this re-
quires therefore to employ thick and heavy materials
for pipes and actuators. Secondly, the usage of high
pressure could also cause a dangerous situation for the
operators that are in the proximity of the robot. The
safety issue is even more critical if the robot, in our
case an exoskeleton, is strictly coupled with the hu-
man being (Pons, 2008). Any failure in the hydraulic
system could seriously harm the user.
One of the main goal of VI-Bot project, un-
der development at DFKI Bremen (Robotics Innova-
tion Center), is to design an intrinsically safe, wear-
able arm exoskeleton for Tele-Robotics applications
(Folgheraiter et al., 2008; Folgheraiter et al., 2009a;
Folgheraiter et al., 2009b; Folgheraiter et al., 2009c).
As requirements the haptic interface should: enable
the operator to control complex robotics systems in
an intuitive way, implement a multi-points haptic
feedback to increase the immersion into the work
scenario, be light weight and adaptable to different
users, and integrate different levels of safe mecha-
nisms. Furthermore, the kinematics architecture of
the system should be designed in order to constrain
as less as possible the natural arm movements and its
workspace.
To achieve these goals and at the same time to
reduce the complexity of the system (number of re-
quired DOF), it is necessary to keep the exoskele-
ton’s joints near to the human arm, “ideally over-
lap them with the human articulations” in order to
avoid parallel kinematic loops. It turns out that
the necessity to have a compact, light, highly dy-
namic actuation system here is crucial. The ad-
vantages of using hydraulically actuators to oper-
ate the exoskeleton’s joints, if directly compared
with classical DC motors, are represented by their
high force/weight ratio, the possibility to use the
axes of the actuator as rotational/prismatic axes
of the robotic system, and their back-drivability.
Furthermore with a proper hydraulic supply and
a precise fluid regulation, strength and high dy-
namic range can be achieved (Raibert et al., 2008),
72
Folgheraiter M., Jordan M., Benitez L., Grimminger F., Schmidt S., Albiez J. and Kirchner F. (2010).
A HIGHLY INTEGRATED LOW PRESSURE FLUID SERVO-VALVE FOR APPLICATIONS IN WEARABLE ROBOTIC SYSTEMS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 72-78
DOI: 10.5220/0002948700720078
Copyright
c
SciTePress

(Kazerooni et al., 2006),(Kahn, 1969).
In figure 1 is shown the actual version of our hap-
tic interface. In total there are 7 actuated joints: 5
located in the shoulder/upper-arm and 2 in the fore-
arm. An additional passive joint allows the wrist
supination-pronation. All active joints are hydraulic
actuated, valves, sensors and electronics are thought
to be mounted directly in proximity of the actuators,
this in order to reduce the amount of cables and pipes
needed. The hydraulic pump and the primary power
supply are located outside the exoskeleton to avoid
additional weight to the system.
Figure 1: The arm exoskeleton equipped with 8 hydraulic
rotative and linear actuators.
A central element within the hydraulic system is
represented by the proportional servo-valve. On the
market there are plenty of proportional (4/3) hydraulic
valves, the problem is that most of them are though to
work with high pressure and therefore do not fulfill
our needs. According to the authors knowledge, the
smallest, light weight and dynamically performing
valve on the market, is currently sold by MOOG Inc.
company (Inc., 2009). The device weights only 92g,
has an hysteresis for the flow characteristics < 3% ,
and a 90
o
phase-lag > 250Hz. Unfortunately the de-
vice is thought to work only with pressure in the range
of 160−250 ·10
5
Pa and it is specifically designed for
Formula-1 applications.
Therefore we started to look at the pneumatic
components, that generally are light and designed for
low pressure (up to 10 · 10
5
Pa). We adapted them to
work with liquids (oil), adding a precise actuation and
proper sensory features.
This document is organized as follows: next sec-
tion describes the experimental setup employed to
measure the repeatability and flow-position charac-
teristic of the valve, section 3 presents the dynamic
model of the driving system, section 4 introduces a
strategy to regulate position and velocity of the valve,
section 5 presents a first fully integrated prototype.
Finally section 6 draws the conclusions and future de-
velopments of this work.
2 EXPERIMENTAL SETUP AND
TESTING
In this section the testbed developed to evaluate the
performance of the servo valve and first experimental
results characterising the valve are presented.
The experimental setup (figure 2) consists of the core
parts of a commercial pneumatic valve (Numatics
Inc. series Micro-Air), a stepper motor, a gear pump
providing pressure supply between 0 − 30 · 10
5
Pa, a
flow-meter, a pressure sensor, and an electronic board
equipped with a STM32 µController.
Figure 2: CAD Model of the valve testbed.
The drive system of the valve is a 3.3 V DC step-
per motor from Nanotec working in fullstep mode,
i.e. 18 degree/step and with an holding torque of
1.6 · 10
−3
Nm. The rotor of the stepper motor is a lead
screw, driving a cylinder and thus converting the ro-
tational motor movement into a translation. The drive
is attached to the valve spool via a permanent magnet,
while the actual valve positions are determined using
an inductive sensor from Bahlluff Inc. by tracking a
steel target connected to the extended spool axis.
Control of the testbed and its components is per-
formed by a STM32 µController (series F103VE),
programmed with a special toolchain consisting of
Matlab/Simulink and Rapidstm32 Blockset, Real-
Time-Workshop and Keil Microvision µVision. The
scheme in Figure 3 sketches the general dependen-
cies of the testbed, were A and B are the connections
of the valve to the actuator chambers, P
s
and T are the
pressure supply line respectively the tank lines of the
gear pump, while the red lines represent the commu-
nication between the µController and the experimen-
tal setup through sensors and actors.
The two main features characterising a hydraulic
valve are:
1. repeatability of the spool movement with respect
to a certain input to the drive system.
2. flow through the valve with respect to spool posi-
tion and the pressure drop over the valve.
A HIGHLY INTEGRATED LOW PRESSURE FLUID SERVO-VALVE FOR APPLICATIONS IN WEARABLE
ROBOTIC SYSTEMS
73

Figure 3: Scheme of experimental test setup.
Thus we focus on showing exemplary results of
these two features. Position control of the fluidic
valve is presented instead in section 4.
2.1 Performance of the Drive System
In the following, the ability of the valve’s drive system
to exactly position the spool over a long time intervall
is investigated. Therefore the repeatability of valve
movement is tested, by applying a special open loop
control sequence. In the adjustment phase the spool
is driven to the center position, while in the second
phase the stepper motor is governed to move the spool
70 steps out of the zero position in both directions,
which covers almost the whole working range of the
developed prototype. Experiments took place under
influence of pressure with P
s
= 15 · 10
5
Pa. Note that
in this experiment the connectors A and B are con-
nected in short circuit, while the speed of the motor is
adjusted to its maximum of 1000 steps per second.
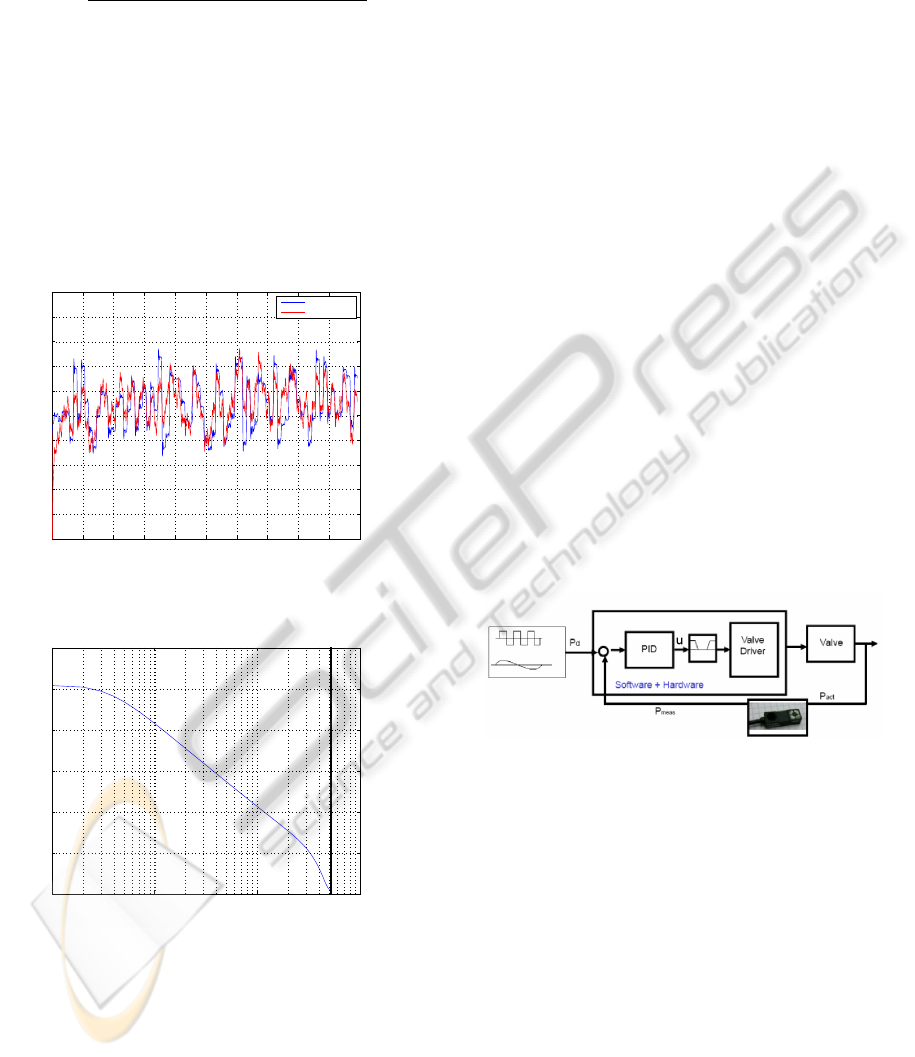
Figure 4 shows the open loop response of the valve
prototype to the applied control sequence. The dura-
tion of the test was 20 minutes, while data was ac-
quired for a time interval of 20 seconds every five
minutes.
−60 −50 −40 −30 −20 −10 0 10 20 30 40 50 60 70
Steps
Figure 4: Position of spool while performing 70 steps out
of center in both directions (P
s
= 15 · 10
5
Pa).
As we can obtain from Figure 4 the position re-
sponse of the drive system to the reference signal is
matching for the whole experiment. Differences for
the travel of the spool, comparing the movement out
of the center in both directions, might be caused by
friction effects. The hysteresis is due to a backlash
of approximately 10 steps (i.e. 0.1mm) between the
spindle of the stepper motor and the thread of the
cylinder moving the spool, when the motor changes
its direction of rotation. This is due to a mechani-
cal behavior and can only be reduced through higher
precision in the manufacturing process of these two
elements, or via a proper control action. Alterna-
tively a special ball-screw could be used, which pro-
vides nearly zero backlash. Overall the valve shows
remarkable repeatability for an open loop control of
spool position under influence of pressure for a long
time intervall.
2.2 Flow Characteristic of Valve
In this section the resulting static flow characteristic
of the valve is presented.
To measure the flow for a fixed pressure drop over
the valve, the connectors A and B are again linked in
a short circuit, causing the valve to work against the
pressure in the tank line T. A flowmeter from Biotech
(series VZS-007-ALU) is connected to the pressure
supply line providing a resolution of 900 pulses/L at
a maximum flow of 5 L/min to the digital I/O of the
µController. Due to the fact that flow needs a certain
time to become constant, the valve is driven at a very
low speed of 1 step/2s through the overall working
period. Simultaneously the average flow is calculated
and sampled each second.
Fig.5 shows the static flow characteristic of the hy-
draulic valve for a constant pressure drop of ∆P =
29 · 10
5
Pa.
Figure 5: Flow-characteristic of the valve with respect to
the spool position (∆P = 29 · 10
5
Pa).
From Figure 5 we can determine that the valve has
a large deadband of approximatively 1.25 mm (be-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
74

tween 0.45 mm and 1.7 mm) where it is completely
closed. This is caused by the inner structure of the
valve, which is adapted from a pneumatic solenoid
valve and can neither be influenced nor changed at the
moment. Therefore this deadband has to be taken into
account in the position control structure presented in
section 4.
Having a closer look at the slopes of the flow charac-
teristic, an area of about 0.2mm can be attested, where
flow regulation should be possible. Driving the spool
to the extremes causes flow saturation (U
a
≤ 0.2 mm
and 1.9mm ≤ U
a
), thus the overall working range of
the valve prototype can be defined to
0.15mm ≤ U
a
≤ 1.95mm,
whereas the amplitude of the flow depends on the
pressure drop over the valve.
The exemplary results shown in this section certify a
good repeatability to the drive system of the devel-
oped prototype. Furthermore the static flow charac-
teristic promises a possible flow regulation within the
defined working range.
3 DYNAMIC MODEL
In this section a non-linear dynamic model that takes
into account the electromechanical behavior of the
stepper motor, the mechanical behavior of the spool
and the static/dynamic effects of the frictions present
within the system, was identified using a recur-
sive Hammerstein-Wiener Parameter Adaptation Al-
gorithm (PAA). The linear part of the model can be
considered as an ARX structure, well known from the
Recursive Least Squares(RLS) Algorithm described
in (I. Landau, 2006). On the other hand, the in-
put and output non-linearities with order nl of a
Hammerstein-Wiener model have the form
η(u) =
n
l
∑
k=2
β
k
u
k
(1)
η(y
lin
) =
n
l
∑
k=2
γ
k
y
k
lin
(2)
with y
lin
as the output of the linear part.
Static Input
non-linearity
n(u)
Linear Dynamics
G(z)
Static Output
non-linearity
n(ylin)
u(t)
y(t)
ylin(t)
(3)
Figure 6: Block diagram of a non-linear Hammerstein-
Wiener model.
Using the equation for a Hammerstein-Wiener
models output (Guo, 2004), the structure of the PAA
becomes, with u(t) and y(t) being the real input and
output signals of the system:
ˆ
θ(t +1) = θ(t) + F(t + 1)φ(t)ε
0
(t +1) (4)
with the Adaptation Gain
F(t + 1) = F(t) −
F(t)φ(t)φ(t)
T
F(t)
1 + φ(t)
T
F(t)φ(t)
(5)
and the Prediction Error
ε
0
(t +1) = y(t + 1) −
ˆ
θ(t)
T
φ(t). (6)
ˆ
θ is the vector of computed parameters, with
ˆ
θ(t)
T
= [ ˆa(t)
T
,
ˆ
b(t)
T
,
ˆ
β(t)
T
,
ˆ
γ(t)
T
], (7)
where ˆa(t)
T
= [ ˆa
1
(t)... ˆa
na
(t)] are the pa-
rameters of polynomial A with order na,
ˆ
b(t)
T
= [
ˆ
b
1
(t)...
ˆ
b
nb
(t)] the parameters of poly-
nomial B with order nb,
ˆ
β(t)
T
= [
ˆ
β
1
(t)...
ˆ
β
nl
(t)] the
parameters of the input non-linearity with order nl,
ˆ
γ(t)
T
= [
ˆ
γ
1
(t)...
ˆ
γ
nl
(t)] the parameters of the output
non-linearity with order nl.
Furthermore φ(t) is the Predictor Regressor Vector
φ(t)
T
= [−y(t), u(t),u(t)
2
, ..., u(t)
nl
, y
lin
(t)
2
, ..., y
lin
(t)
nl
].
(8)
The output of the linear part y
lin
cannot be mea-
sured, nevertheless it can be calculated by multiplying
the parts of the predictor and the parameters vector
corresponding to the linear model:
y
lin
(t +1) =
ˆ
θ[1 : na + nb + nl](t)φ[1 : na + nb + nl]
(9)
Finally the model output ˆy is computed
ˆy(t + 1) =
ˆ
θ(t +1)
T
φ(t) (10)
The measured signals used for identification are
the current absorbed by the stepper motor i
M
as input
signal, and position of the valvespool x
S
in terms of
mm as output. In order to characterize the dynamic
behavior of the valve we only considered the range
of spool positions where the flow can be effectively
regulated. As a first step the data was filtered using a
bandpass filter allowing frequencies between 0Hz and
60Hz, which does not affect the dynamic range of the
model. Different models were identified starting from
distinct initial values for the parameter vector, the best
data fitting reached an average of 87.49%. The out-
put of the obtained model can be seen in Figure 7,
A HIGHLY INTEGRATED LOW PRESSURE FLUID SERVO-VALVE FOR APPLICATIONS IN WEARABLE
ROBOTIC SYSTEMS
75
whereas the transfer function of the linear dynamic
part is given by:
G(z) =
−0.1675z − 0.1039
z
3
− 0.8512z
2
− 0.1351z − 0.03855
(11)
with the sample time 0.01s. The Bode diagram of
G(z) is shown in Figure 8. Finally the static input
non-linearity of the model was identified to:
η(u) = 0.59831 ∗ u
2
− 0.00047669 ∗ u
3
, (12)
while the static output non-linearity of the model is
given by:
η(y
lin
) = 0.030651 ∗ y
2
lin
− 0.042948 ∗ y
3
lin
(13)
0 200 400 600 800 1000 1200 1400 1600 1800 2000
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85
1.9
1.95
2
time [cs]
Position [mm]
Real and model output
Real output
Model output
Figure 7: Comparison of the real and the model output.
Magnitude (dB)
Frequency (Rad/s)
Bode Diagram
10
0
10
1
10
2
10
3
−30
−20
−10
0
10
20
30
Figure 8: Magnitude Bode Plot of the linear transfer func-
tion.
4 VALVE CONTROL
This section introduces a first approach to control the
developed fluidic valve.
Regarding the experiments shown in section 2, up to
now all movements of the spool have been performed
in open loop, i.e. no feedback of the spool position
was used. To facilitate precise position control of the
valve at a high bandwidth, the drive system is to be
controlled in closed loop, using the feedback of the
inductive sensor to track the desired trajectories given
by the µController. Therefore classical PID-control
in combination with a discretisation of stepper motor
motion is applied.
A basic requirement for position control is the ability
of the drive system to run at different speeds. Due to
the fact that the stepper motor is somehow a digital
drive, which can only have the states run or stop, a
discretising function is introduced to the control loop.
The idea is to vary the number of samples passing
between two step commands by defining a variable
delay factor τ
d
, which causes a step command only
every τ
d
∗ T
s
, with T
s
as basic sampling time of the
system. Thus an increase of τ
d
results in a slower
motion of the valve spool, because less steps are per-
formed by the drive system in a fixed time interval.
The value of τ
d
is set by the control action u of the
PID-controller, tracking the desired spool position p
d
,
as follows
τ
d
=
15 − |u|·500 , u ≤ 0.03
1 , u > 0.03
(14)
Figure 9 shows the resulting scheme of the closed
loop control.
Figure 9: Scheme of discretised closed loop valve control.
Whereas p
meas
represents the measured and p
d
the
desired spool position. The discretising function can
be found between the PID-controller and the valve
driver.
To reject noise from the position measurement, a
moving average low-pass filter is realised via software
in the µController. The following Figure 10 shows the
modulation of the valve speed through the discretising
function.
To verify the functionality of the control startegy,
the valve is governed to execute a velocity sweep.
Starting from τ
d
= 100 the delay factor is decreased
by an amount of five every 5 ms until the maximum
speed at τ
d
= 1 is reached. After changing the
direction of movement τ
d
is reset to its starting value.
It is obvious that the speed of the valve is increased
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
76
0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
time (s)
Position (mm)
−1.5
−1.2
−0.9
−0.6
−0.3
0
0.3
0.6
0.9
1.2
1.5
Velocity (mm/s)
Figure 10: Speed modulated fluidic valve, blue: valve posi-
tion, green: velocity.
while the delay factor decreases and vice versa.
To test the overall performances of the developed
control scheme, sinusoidals with different frequencies
and step-like reference trajectories were supplied.
The PID’s parameters have been determined through
classical Ziegler-Nichols method, whereas the critical
controller gain and the critical oscillation period
were respectively identified as K
p,crit
= 0.58 and
T
crit
= 0.032 s. These results in the following con-
troller gains
K
p
= 0.35, K
i
= 0.02, K
d
= 0.004.
Figure 11 exemplary presents the tracking results of
the position control loop for step-like reference sig-
nals.
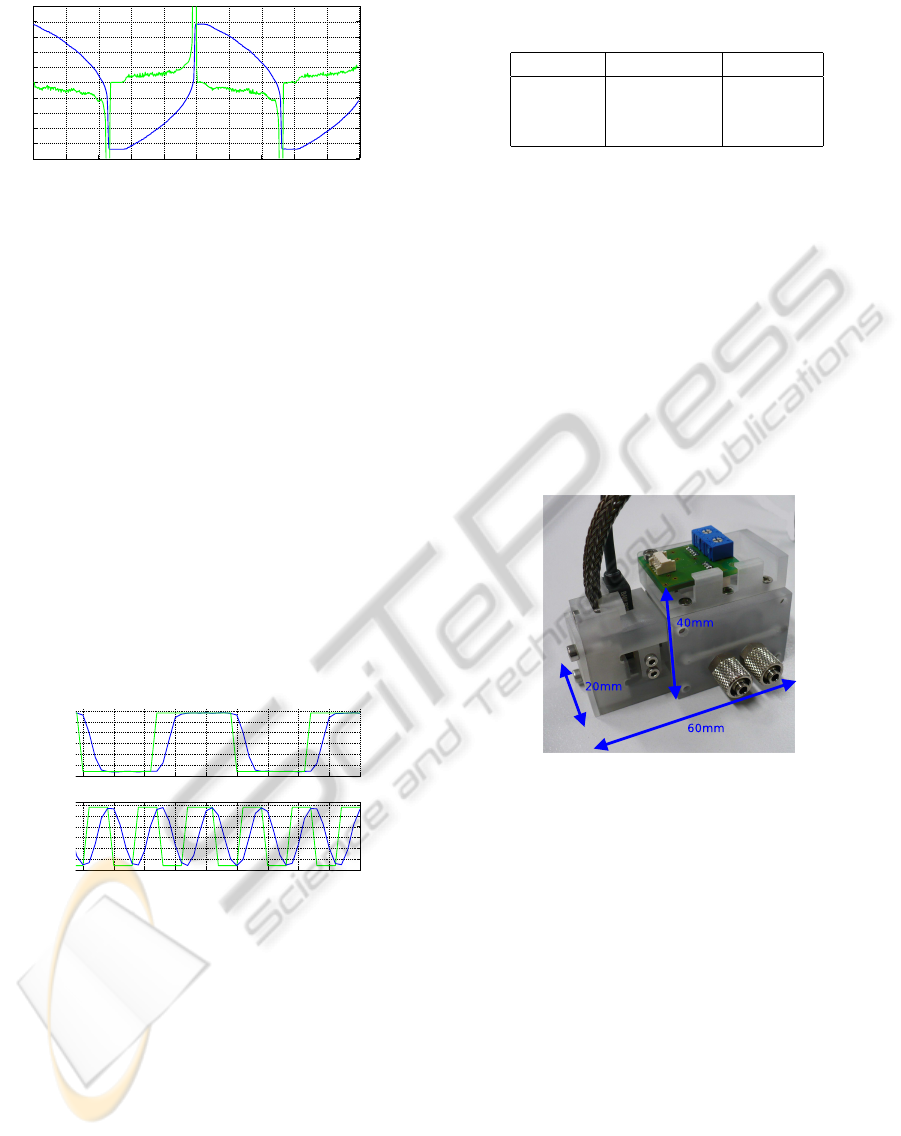
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
time (s)
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
(a)
(b)
Figure 11: Step-like reference tracking at (a) f=1Hz, (b)
f=3Hz, where the green line represents the reference.
As we can obtain from the figure, the controller
tracks step-like signals without overshoot up to an ac-
tual maximum frequency of f=3Hz. Due to the fact
that this test is performed in the maximum working
range, a better dynamic response can be expected for
smaller movements.
Finally Table 1 sums up the characteristic values for
a sinusoidal reference tracking, where f is the fre-
quency of the reference, e
p
m
ax
the maximum error in
position and ϕ the phase shift between the two sig-
nals.
Table 1: Chracteristic values for sinusoidal reference track-
ing.
f in [Hz] e
p
m
ax
in [V] ϕ in [deg]
0.5 0.028 0.81
1 0.032 1.8
3 0.11 3.24
5 THE VALVE PROTOTYPE
After the choice of the proper hardware and elec-
tronic components, a new valve was designed
and realized (figure 12) using rapid prototyping
technique. The final device has a volume of
LxWxH=(60mm)x(20mm)x(40mm), and the version
with aluminum parts will weight approximately 80g
including one position and two pressure sensors, an
amplifier board, the stepper motor, and the electri-
cal/hydraulic connectors.
Figure 12: Valve developed using rapid prototyping tec-
nique.
In this first prototype the PWM motor driver and
the control logic are located in a separated device,
nevertheless future versions may also include these
components on-board. This will reduce the amount
of required cables to only a single power and a data
line (e.g. a CAN-BUS). Compared with other state of
the art hydraulic valves (Inc., 2009), the one here pre-
sented is designed to work with relatively low pres-
sures both for hydraulic and pneumatics purposes, it
is extremely compact and light-weight, furthermore it
integrates two pressure sensors that are directly con-
nected to the two output lines A and B (see schema in
figure 2). This allows a fine tuning of the pressure in-
side the two actuator chambers, and therefore enables
a precise control of the generated torque.
A HIGHLY INTEGRATED LOW PRESSURE FLUID SERVO-VALVE FOR APPLICATIONS IN WEARABLE
ROBOTIC SYSTEMS
77

6 CONCLUSIONS AND FUTURE
DEVELOPMENTS
In this paper a new fluid servo-valve specifically de-
signed for wearable robotic systems is presented. The
work is motivated by the fact that, according to the
authors knowledge, no commercial valve exists for
precise low pressure hydraulic actuators control. As
general requirements, compactness, light-weight, and
high dynamics were considered during the design pro-
cess. A first series of experiments have been per-
formed to test repeatability, flow-position character-
istics and dynamic response. A model of the drive
system of the servo-valve was identified using a recur-
sive Hammerstein-Wiener parameter adaptation algo-
rithm. The combination of a linear and dynamic part
with a non linear static component let to reach a fit of
87%. Finally to test the overall functionality of the
valve and to measure its step response characteristics,
a proper control algorithm was implemented that al-
lows to regulate the position and the velocity of the
valve’s spool.
Further work have to be dedicated in order to iden-
tify the overall model that will explicitly define the
position-flow-pressure relationship. The backlash and
deadband problems need to be properly addressed. In
particular the employment of a ball-screw for the roto-
translation mechanism of the valve, instead of a nor-
mal lead screw , will improve the precision in con-
trolling the position. Furthermore, with a customized
design of the spool, will be possible to decrease the
switching time between the two opening positions,
and therefore to improve the dynamic behavior of the
servo-valve.
ACKNOWLEDGEMENTS
The work presented in this paper was done within
the VI-Bot project, funded by the German Ministry
of Science (BMBF), [grant number 01IW07003].
REFERENCES
Folgheraiter, M., Bongardt, B., Albiez, J., and Kirchner,
F. (2008). A bio-inspired haptic interface for tele-
robotics applications. In IEEE International Con-
ference on Robotics and Biomemetics (ROBIO-2008),
Thailand, Bangkok.
Folgheraiter, M., Bongardt, B., Albiez, J., and Kirchner, F.
(2009a). Design of a bio-inspired wearable exoskele-
ton for applications in robotics. In International Joint
Conference on Biomedical Engineering Systems and
Technologies (BIOSTEC-2009), Portugal, Porto.
Folgheraiter, M., de Gea, J., Bongardt, B., Albiez, J., and
Kirchner, F. (2009b). Bio-inspired control of an arm
exoskeleton joint with active-compliant actuation sys-
tem. Applied Bionics and Biomechanics, 6(2):193–
204.
Folgheraiter, M., Schmidt, B. B. S., de Gea Fernand
´
ez, Al-
biez, and Kirchner, F. (2009c). Design of an arm ex-
oskeleton using an hybrid motion-capture and model-
based technique. In IEEE International Conference on
Robotics and Automation. IEEE International Confer-
ence on Robotics and Automation (ICRA-2009), May
12-17, Kobe, Japan.
Guo, F. (2004). A New Identification Method for Wiener
and Hammerstein System. PhD thesis, Karlsruhe Uni-
versity.
Hayward, V. (1994). Experimental Robotics III, Design of
a hydraulic robot shoulder based on a combinatorial
mechanism, volume 200. Springer Berlin / Heidel-
berg.
I. Landau, G. Z. (2006). Digital Control Systems. Springer.
Inc., M. (2009). Sub miniature servovalve e024. Technical
report, http://www.moog.com/.
Jacobsen, S. C., Smith, F. M., Backman, D. K., and Iversen,
E. K. (1991). High performance, high dexterity, force
reflective teleoperator ii. In Proc. ANS Topical Meet-
ing on Robotics and Remote Systems.
Kahn, M. (1969). Optimal Control of a Hydraulic Arm.
PhD thesis, Stanford University M.E Dept.
Kazerooni, H., Steger, R., and Huang, L. (2006). Hybrid
control of the berkeley lower extremity exoskeleton
(bleex). The International Journal of Robotics Re-
search, 25(5-6):561–573.
Pons, J. L., editor (2008). Wereable Robots: Biomechatron-
ixs Exoskeletons. Wiley.
Raibert, M., Blankespoor, K., Nelso, G., Playter, R., and
the BigDog Team (2008). Bigdog, the rough-terrain
quaduped robot. Technical report, Waltham, MA
02451 USA.
Yoshinada, H., Yamazaki, T., Suwa, T., and Naruse, T.
(1992). Design and control of a manipulator system
driven by seawater hydraulic actuator. In Second Int.
Symposium on Measurement and Control in Robotics
(ISMCR), pages 359–364.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
78
