
NORMAL FLAT FORMS FOR A CLASS OF 0-FLAT AFFINE
DYNAMICAL SYSTEMS AND ITS APPLICATION TO
NONHOLONOMIC SYSTEMS
S. Bououden, D. Boutat
PRISME - ENSI de Bourges, 10 boulevard Lahitolle, 18020, Bourges cedex, France
F. Abdessemed
Faculty of Engineering, Electronic Departement, Batna University, 05000, Algeria
Keywords:
Flatness, Nonlinear systems, Normal form, Involutivity, Nonholonomic systems.
Abstract:
In this contribution normal flat forms are used to achieve stable tracking control for nonlinear flat systems.
Our approach is based on a nonlinear transformations in order to derive two 0-flat normal forms for a class
of non-linear systems, a dynamical control law is then proposed to achieve stable trajectory tracking. Finally,
This method is generalized to analysis and control a class of a 0-flat affine nonlinear multi-input dynamical
systems for which we can build flat outputs to give structural normal flat forms. The computer simulations are
given in the paper to demonstrate the advantages of the method.
1 INTRODUCTION
The control of nonholonomic dynamic systems has
received considerable attention during the last years
and become a popular subject in the nonlinear con-
trol. One a reasons for this, in real world, the non-
holonomic systems are frequently used to describe
some pratical control systems such as mobile robot,
car-like vehicule, and under-actuated satellites, can
all be modeled as nonholonomic control systems or
nonholonomic maneuvers. Hence, control problems
involve them have attracted attention in the control
community.
Different methods have been applied to solve mo-
tion control problems. (Kanayama et al., 1991) pro-
pose a stable tracking control method for nonholo-
nomic vehicule using a Lyapunov function. (Lee et
al., 1998) solved tracking control using backstepping
and in (Lee and Tai, 2001) with saturation constraints.
Furthermore, most reported designs rely on intelli-
gent control approaches such as Fuzzy Logic Control
(Pawlowski et al., 2001), (Tsai et al., 2004), Neural
Networks (Song and Sheen, 2000), and (Chwa, 2004)
used a sliding mode control to the tracking control
problem. (Fierro and Lewis, 1995) propose a dynam-
ical extention that makes possible the integration of
kinematic and torque controller for a nonholonomic
mobile robot. (Fukao et al., 2000), introduces an
adaptive tracking controller for the dynamic model of
mobile robot with unknown parameters using back-
stepping. However the field of control of such sys-
tems is still open to develop other control strategie.
Application of flatness to problems of engineering
interest have grown steadily in recent years. Michel
Fliess et al. (Fliess et al., 1992), (Fliess et al., 1995)
introduced the concept of flat outputs, these outputs
guarantee that the problem will be put in term of con-
trol algorithm for motion planning, trajectory genera-
tion and stabilization. A limitation of flatness is that
there does not exist necessary and sufficient condi-
tions to determine if a general system is differentially
flat and there no algorithm to compute the flat out-
puts. Nevertheless, it is well-known that all control-
lable linear systems can be shown to be flat. Indeed,
any system that can be transformed into a linear sys-
tem by changes of coordinates, static feedback trans-
formations, or dynamic feedback transformations is
also flat (Jakubczyk and Respondek, 1980), (Hunt et
al., 1983).
We present in this paper two normal flat forms, It
deals with sufficient geometrical conditions which en-
able us to conclude if a given nonlinear controllable
dynamical system can be transformed, by means of
change of coordinates, to one of these normal forms.
275
Bououden S., Boutat D. and Abdessemed F. (2010).
NORMAL FLAT FORMS FOR A CLASS OF 0-FLAT AFFINE DYNAMICAL SYSTEMS AND ITS APPLICATION TO NONHOLONOMIC SYSTEMS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 275-280
DOI: 10.5220/0002949002750280
Copyright
c
SciTePress

In the same way it gives an algorithm to compute the
flat outputs. As an illustration to the proposed ap-
proach, a trajectory tracking of a nonholonomic uni-
axial vehicule is simulated. As we will show with this
example, for this particular class, our method presents
a new direction to solve the flatness problem.
The paper is organized as follows. In section 2 we
address notations, definitions and our problem state-
ment, we describes the classes of 0-flat systems study.
The necessary and sufficient geometrical conditions
for affine dynamical systems are presented in Section
3. In sections 4 provides illustrative examples and
simulations. Some conclusions are presented in sec-
tion 5.
2 DEFINITION AND PROBLEM
STATEMENT
Let us consider the following class of multivariable
nonlinear systems described in state space form by
equations of the following kind In the next section,
we will recall the concept of 0-flat systems
˙x = f (x) +
m
∑
i=1
g
i
(x)u
i
(1)
where x ∈ χ ⊆ ℜ
n
, u ∈ U ⊆ ℜ
m
and f is a smooth
function on χ×U.
Definition 1. The dynamical system (1) is flat if there
exist m functions y = (y
1
, ..., y
m
) called the flat outputs
such that:
1- y = F(x, u, ˙u,..., u
(r
1
)
) is a function of the state x,
the input u, and its derivatives u
(i)
2- x = ϕ(z, ˙z, ..., z
(r
2
)
) is a function of the flat outputs
and their derivatives.
3- u = γ(z, ˙z, ..., z
(r
2+1
)
) is a function of the flat out-
puts and their derivatives.
In this paper, we will deal with multi-input affine dy-
namical systems, without loss of generality, we will
assume within this work that:
Assumption 1. The vector field G = [g
1
, ..., g
m
] is of
rank m.
However, we don’t assume that ∆ = span(G) is invo-
lutive as it is the case in many researches which try to
compute the inverse dynamics. We will characterize a
class of dynamical systems for which the flat outputs
are only functions of states x. This dynamical systems
is called 0-flat: (Pereira, 2000)
y
i
= F
i
(x); where 1 ≤ i ≤ m (2)
2.1 A Class of Structurally 0-Flat
Dynamical System
It is well-known that the codimension one (m = n −
1) controllable dynamical systems are 0-flat (Charlet
and L´evine, 1989). Our result concerns a normal flat
forms of affine dynamical systems with n states and
m = n−2 inputs (codimension 2). Our objective is to
introduce our formulation.
2.2 Main Result
In the sequel we introduce the following notation
z
ji
= z
j,i
= y
j
with j = 1 : m relative to the flat out-
put y
j
, which means i− 1 derivation of the output y
j
.
2.2.1 First 0-Flat Normal Form
Let us consider the following proposition written in
terms of the z
j1
, where j = 1 : m state variables. Let
us consider the following proposition
Proposition 1. The following dynamical system is
0-flat
˙z
11
= z
12
+
n−2
∑
i=3
β
i
11
(z)u
i
˙z
12
= α
12
(z) + u
1
+ β
2
12
(z)u
2
+ ... + β
m
12
(z)u
m
˙z
21
= z
22
+
n−2
∑
i=3
β
i
21
(z)u
i
(3)
˙z
22
= α
22
(z) + β
1
22
(z)u
1
+ u
2
+ ... + β
m
22
(z)u
m
˙z
j1
= α
j1
+ u
j
+
n−2
∑
i=3,i6= j
β
i
j1
(z)u
i
with z
11
, z
21
as flat outputs, and m = n− 2.
Proof 1. Now we will show that the equations (3)
represent a locally dynamical 0-flat system. Consider
the following m equations :
E
1
= ˙z
1,1
− z
1,2
−
m
∑
i=3
β
i
11
(z)u
i
= 0 (4)
E
2
= ˙z
2,1
− z
2,2
−
m
∑
i=3
β
i
21
(z)u
i
= 0 (5)
E
j
= ˙z
j,1
− α
j,1
− u
j
−
m
∑
i=3,i6= j
β
i
j1
(z)u
i
= 0 (6)
where 3 ≤ j ≤ m
Let v = (z
1,2
, z
2,2
, u
3
, ..., u
m
) be the vector of un-
known system variables and let us compute the fol-
lowing partial derivative
∂(E
1
, ..., E
m
)
∂v
= −I
m
+ O (v) (7)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
276

Where I
m
is the identity matrix and O (v) represents
the order one of the v variables. From the equations
(4, 5, 6) and the fact that
∂(E
1
,...,E
m
)
∂v
is locally invert-
ible then the implicite function theorem, allows us to
conclude that there exists ϕ
k
() and γ
k
() functions such
that
z
k,2
= ϕ
k
(y
j
, ˙y
j
, j = 1 : m, k = 1 : 2) (8)
u
k
= γ
k
(y
j
, ˙y
j
, j = 1 : m, k = 3 : m) (9)
By replacing (8) and (9) in the second and the fourth
dynamic equation of (3) we can get the inputs u
1
and
u
2
as functions of (y
j
, ˙y
j
) for j = 1 : m and their sec-
ond derivatives y
(2)
1
, y
(2)
2
. In the next subsection we
will give a slightly different 0-flat normal form which
is related to more drastic conditions.
2.2.2 Second 0-Flat Normal Form
The second canonical system gives the missing vari-
ables from the successive derivation of the same flat
output written in terms of the variables z
j1
= y
j
, 1 ≤
j ≤ (n− 2) :
Proposition 2. The following dynamical system is
0-flat
˙z
11
= z
12
+
n−2
∑
i=2
β
i
11
(z)u
i
˙z
12
= z
13
+
n−2
∑
i=2
β
i
12
(z)u
i
(10)
˙z
13
= α
13
(z) + u
1
+
n−2
∑
i=2
β
i
13
(z)u
i
˙z
j1
= α
j1(z)
+ u
j
+
n−2
∑
i=2
β
i
j1
(z)u
i
Where 2 ≤ j ≤ m, and m = n − 2.
Proof 2. The main difference from (3) concerns the
fact that we assume the variable z
13
not present in the
dynamics ˙z
j1
, for 1 ≤ j ≤ (n − 2). Then we can con-
clude that
Condition 1. z
13
must not be present in β
i
j1
(z) for
j = 1 : m, and i = 2 : m
Condition 2. z
13
must not be present in α
j1
for
j = 2 : m.
Under these conditions we can use the same proce-
dure as the canonical form (3) to solve the dynamical
system (10). So let us consider the m equations:
E
1
= ˙z
11
− z
12
−
n−2
∑
i=2
β
i
11
(z)u
i
= 0 (11)
E
j
= ˙z
j1
− α
j1(z)
− u
j
−
n−2
∑
i=2
β
i
j1
(z)u
i
= 0 (12)
We can put v = (z
12
, u
2
, ..., u
m
) the vector of un-
known system variables. Let us compute the follow-
ing partial derivative
∂(E
1
, E
2
..., E
m
)
∂v
= −I
m
+ O
1
(v) (13)
Where I
m
is the identity matrix and O
1
(v) represents
the order one of the v variables. From the equations
(11, 12) and the fact that
∂(E
1
,E
2
,...,E
m
)
∂v
is locally in-
versible then the implicite function theorem, allows
us to conclude that there exists ϕ
1
() and γ
k
() func-
tions such that
z
1,2
= ϕ
1
(y
j
, ˙y
j
, j = 1 : m) (14)
u
k
= γ
k
(y
j
, ˙y
j
, j = 1 : m, k = 2 : m) (15)
By replacing (14) and (15) in the second and the
third dynamic equation of (10) we can get the variable
z
13
as a function of ˙y
1
, y
(2)
1
and y
i
for i = 1 : m. Also
we get the input variable u
1
as a function of ˙y
1
, y
(2)
1
,
y
(3)
1
and y
i
for i = 1 : m.
3 TRANSFORMATIONS
Now, we give some conditions for a class of nonlinear
systems, for which we can transform a nonlinear dy-
namical system (1) in a new 0-flat normal forms. So
we distinguished two cases:
Case 1. The controllability distribution has the
following vector field:
∆
1
= span{g
1
, g
2
, ..., g
n−2
, ad
f
g
1
, ad
f
g
2
}, with
dim(∆
2
) = n.
Case 2. The controllability distribution has the
following:
∆
2
= span{g
1
, g
2
, ..., g
n−2
, ad
f
g
1
, ad
2
f
g
1
}, with
dim(∆
2
) = n.
3.1 Case 1
Proposition 1. If the distribution ∆
1
=
span{g
1
, g
2
} ⊆ ∆
1
is involutive, then the dynamical
system (1) is 0-flat.
Proof 1. As dim(∆
1
) = n and ∆
1
is a 2-dimensional
involutive distribution, there exist n− 2 = m indepen-
dent functions of states x, (y
i
= z
i,1
), 1 ≤ i ≤ m such
that:
• ∆
2
=
T
m
i=1
kerdy
i
where kerdy
i
means the kernel
of the differential of the function y
i
.
NORMAL FLAT FORMS FOR A CLASS OF 0-FLAT AFFINE DYNAMICAL SYSTEMS AND ITS APPLICATION TO
NONHOLONOMIC SYSTEMS
277
• L
[g
k
, f]
z
k,1
= 1 for k = 1 : 2
• L
g
k
z
k,1
= 1 for 3 ≤ k ≤ m
Now let us consider for k = 1 : 2 the following new
variables: z
k,2
= L
f
z
k,1
where L
f
is the Lie derivative
in the direction of f. Therefore the set of the n vari-
ables: (z
i,1
), 1 ≤ i ≤ m, z
1,2
and z
2,2
form a new co-
ordinate system. For this the derivative of these vari-
ables give structural 0-flat normal form (3).
3.2 Case 2
Now let us describe the above conditions (1), (2) in
(Proof 2) geometrically. For this one remarks that in
(10) we have g
1
=
∂
∂z
1,3
. Therefore the independence
of the others input directions (g
i
)
2≤i≤m
from the vari-
ables z
1,3
can be described by the fact that:
[g
1
, g
k
, ] ∈ span{g
1
, ad
f
g
1
}.
Indeed ad
f
g
1
=
∂
∂z
1,3
+ h(z)
∂
∂z
1,2
. For second condi-
tion, α
j,1
= L
f
z
j,1
for all j ≥ 2. Then, if we want
this function independent of the variable z
1,3
, then we
must have L
g
1
L
f
z
j,1
= 0. As u
1
is not present in the
last equations of (10) then L
g
1
z
j,1
= 0. Therefore,
L
g
1
L
f
z
j,1
= 0 is equivalent to L
ad
f
g
1
z
j,1
= 0. Thus we
can conclude that the distribution ∆
2
= {g
1
, ad
fg
1
} is
involutive.
Proposition 3. If the distribution ∆
2
= {g
1
, ad
fg
1
} ⊆
∆
2
is involutiveand [g
1
, g
2
] ∈ span{g
1,
ad
fg
1
} then the
dynamical system (1) is 0-flat.
4 ILLUSTRATIVE EXAMPLE
In order to verify the performance of proposed
methodology, as an illustration, we used a nonholo-
nomic system. A nonlinear transformation is made in
order to derive a 0-flat normal forms, the results ob-
tained with our proposed control based on 0-flat nor-
mal forms of codimension 2 are used to control the
nonlinear system in the aim to show its usefulness.
4.1 Application to a Nonholonomic
Uniaxal Vehicule
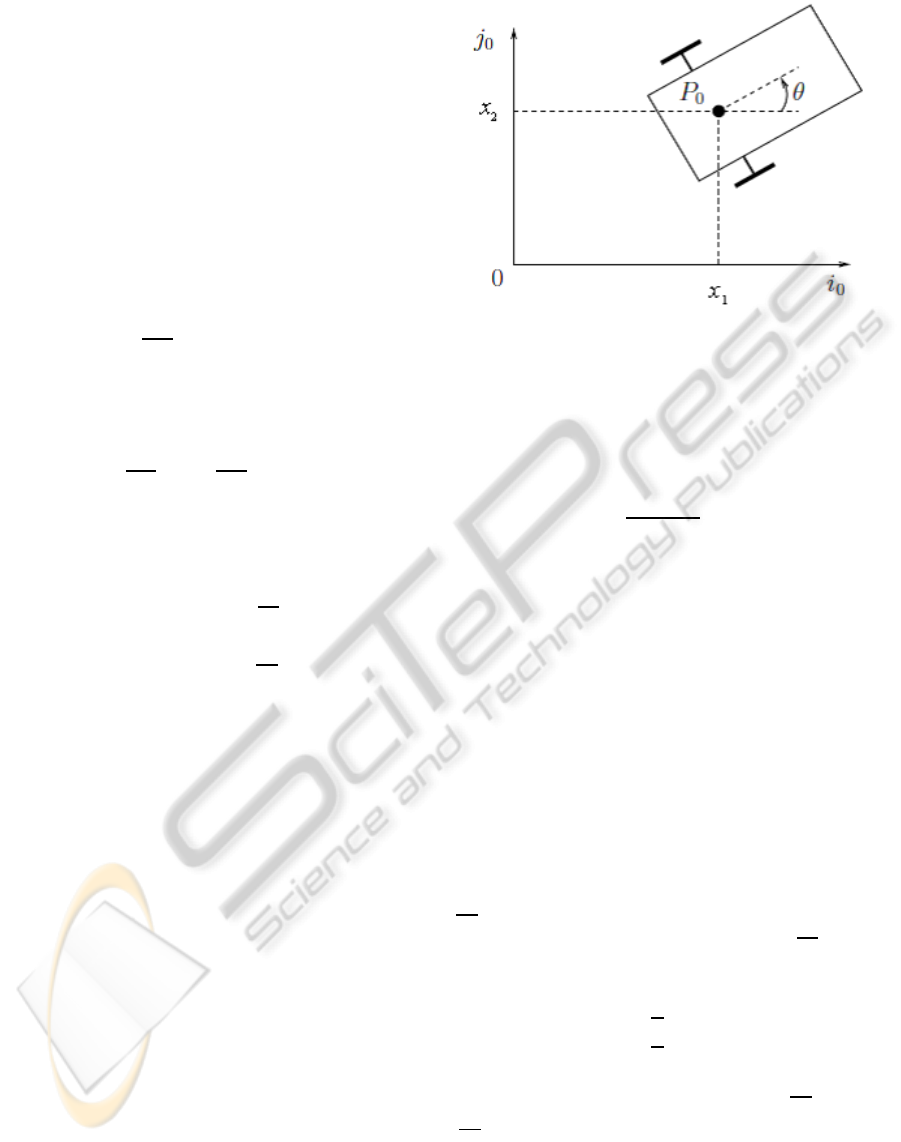
The example we study is the kinematic model of
a mobile car (see Figure 1), this system can be
represented by the following set of equations:
˙x
1
= vcosθ
˙x
2
= vcosθ
˙
θ = ω
(16)
Figure 1: Coordinates system of car.
where
(x
1
, x
2
) represents the cartesian position of the centre
of mass of the car,
θ its inclination with respect to the horizontal axis,
(v, ω) its forward and angular velocities respectively.
the model (16) is not static feedback linearizable.
However, the problem can be solved by introducing
the new state x
4
=
p
˙x
1
2
+ ˙x
2
2
.
Resulting in the extended static feedback linearizable
system described by:
˙x
1
= x
4
cos(x
3
)
˙x
2
= x
4
sin(x
3
)
˙x
3
= u
1
˙x
4
= u
2
(17)
The outputs are the states variables: x
T
=
(x
1
, x
2
, x
3
, x
4
), the above equations can be written in
the following form:
˙x = f (x) + g
1
(x)u
1
+ g
2
(x)u
2
; (18)
where f(x), g
1
(x), g
2
(x) are the smooth vector fields.
We will transform the nonlinear dynamical system
(17) in a structural 0-flat normal form, the distribu-
tion
∆
1
= {g
1
, g
2
} has dimension 2.
The bracket [g
1
, g
2
] = 0 which means that ∆
1
is invo-
lutive. Then there exists two functions y
1
(x) and y
2
(x)
such that:
dy
1
(x).∆
1
= 0 (19)
dy
2
(x).∆
1
= 0 (20)
From (19) and (20) we can conclude that
∂y
i
∂x
3
= 0 and
∂y
i
∂x
4
= 0 ∀x
1
, x
2
. Then it is enough to set y
1
(x) a func-
tion of x
1
and y
2
(x) any function in terms of x
2
. Let
us consider y
1
= x
1
and y
2
= x
2
.
Now let us consider for k = 1 : 2 the following vari-
ables: z
k,1
= y
k
and the new coordinate variables:
z
1,2
= L
f
z
1,1
and z
2,2
= L
f
z
2,1
.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
278
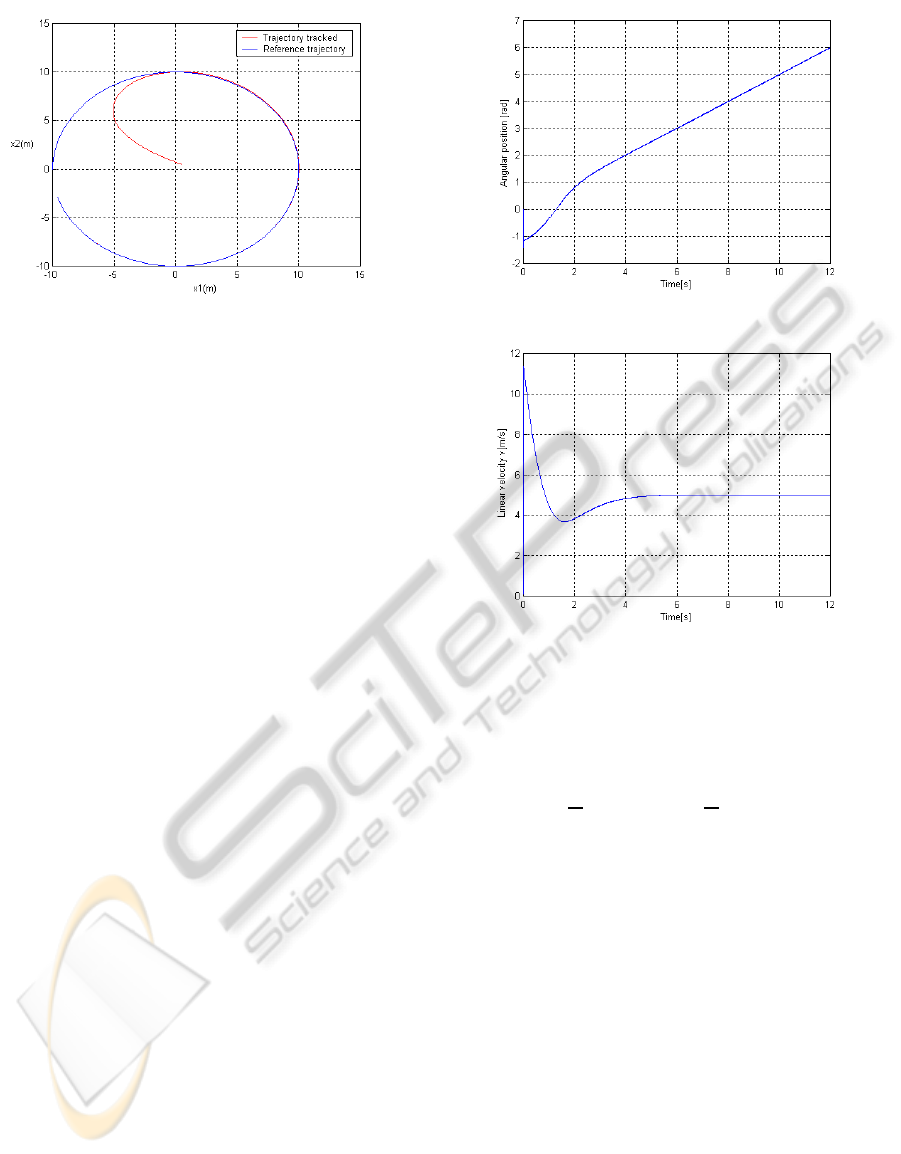
Figure 2: Trajectory tracked by uniaxal vehicule.
For this the derivativeof these variablesgive struc-
tural 0-flat normal form (3).
˙z
11
= z
12
+
n−2
∑
i=3
β
i
11
(z)u
i
˙z
12
= α
12
(z) + u
1
+ β
2
12
(z)u
2
+ ... + β
m
12
(z)u
m
˙z
21
= z
22
+
n−2
∑
i=3
β
i
21
(z)u
i
(21)
˙z
22
= α
22
(z) + β
1
22
(z)u
1
+ u
2
+ ... + β
m
22
(z)u
m
The system is codimension 2, the canonical form can
be expressed as follows:
˙z
11
= z
12
˙z
12
= α
12
(z) + β
1
11
(z)u
1
+ β
2
12
(z)u
2
˙z
21
= z
22
˙z
22
= α
22
(z) + β
1
22
(z)u
1
+ β
2
22
(z)u
2
(22)
where
α
12
= 0, α
22
= 0
β
1
12
(z) = x
4
sin(x
3
);β
2
12
(z) = x
4
cos(x
3
)
β
1
22
(z) = cos(x
3
);β
2
22
(z) = sin(x
3
)
The main objective of the flatness based controller
is to obtain the asymptotic tracking of a desired tra-
jectory, let the system output be y
1
= z
11
, y
2
= z
21
,
from (22) we can obtain the expressions of u
1
, u
2
in
terms of (y
1
, ˙y
1
, y
2
, ˙y
2
), and the second derivatives of
two first variables ¨y
1
, ¨y
2
. Let ¨y
1
= v
1
, ¨y
2
= v
2
two
new inputs control such that:
v
1
v
2
=
¨y
d
1
+ k
d
( ˙y
d
1
− ˙y
1
) + k
p
(y
d
1
− y
1
)
¨y
d
2
+ k
d
( ˙y
d
2
− ˙y
2
) + k
p
(y
d
2
− y
2
)
where k
d
, k
p
> 0 are control gains chose care-
fully to ensure exponential stability, and ¨y
d
, ˙y
d
, y
d
are
prescribed reference trajectories.
The control law:
u
1
u
2
=
β
1
11
(z) β
2
12
(z)
β
1
22
(z) β
2
22
(z)
−1
v
1
− α
12
(z)
v
2
− α
22
(z)
The controller gains are chosen to be:
Figure 3: Unicycle orientation x
3
.
Figure 4: Linear velocity of unicycle vehicule.
k
p
= diag[1000, 1000], k
d
= diag[1000, 1000].
We consider the following continuously derivable
desired trajectories:
y
d1
= rsin
v
0
r
t, y
d2
= −rcos
v
0
r
t is assigned, which
described a circular movement with radius r = 10 at
the constant speed v
0
= 5.
The closed loop system was simulated using the
initial conditions x
T
(0) = (0.5;0.5;0;0.1) for system
(17).
The trajectory tracked (see Fig. 2) is very close
to the desired one, achieving by thus the control ob-
jective. Finally, angular position and linear velocity
are depicted in the Fig. 3 and Fig. 4. It can be seen
that our control scheme achieves satisfactory perfor-
mances.
5 CONCLUSIONS
We described the development of a tracking controller
based on normal flat forms. This method is general-
ized to analysis and control a class of a 0-flat affine
nonlinear multi-input dynamical systems for which
NORMAL FLAT FORMS FOR A CLASS OF 0-FLAT AFFINE DYNAMICAL SYSTEMS AND ITS APPLICATION TO
NONHOLONOMIC SYSTEMS
279

we can build flat outputs to give structural normal flat
forms. Simulation results show an acceptable perfor-
mance under the studied cases.
REFERENCES
Fliess, M., L´evine, J., Martin, P. and Rouchon, P., 1992. Sur
les systmes non linaires diffrentiellement plats. C. R.
Acad. Sci. Paris Sr. I Math., 315: pp 619-624.
Fliess, M., L´evine, J., Martin, P. and Rouchon, P., 1995.
Flatness defect of non-linear systems introductory the-
ory and examples. Internat. J. Control, 61: pp 1327-
1361.
Chwa, D., 2004. Sliding- Mode Tracking Control of non-
holonomic Wheeled Mobile robotin polar coordinates,
IEEE Trans. On Control Syst. Tech. Vol. 12, No. 4,pp
633-644.
Fierro, R., Lewis, F. L., 1995. Control of Nonholonomic
Mobile Robot: Backstepping Kinematics into Dynam-
ics, Proc. 34th Conf. On Decision & Control, New
Orleans, LA.
Fukao, T., Nakagawa, N. Adachi, 2000. Adaptive Track-
ing Control of a Nonholonomic Mobile Robot. IEEE
Trans, On Robotics and Automation, Vol. 16, No. 5,
pp609-615.
Kanayama, Y., Kimura, Y., Miyazaki, F., Noguchi, T.
1991. A stable Tracking control method for a
Non-Holonomic Mobile Robot. Proc. IEEE/RSJ Int.
Workshop on Intelligent Robots and Systems, Osaka,
Japan, pp 1236-1241.
Lee, T-C., Lee, C.H., Teng, C-C. 1998. Tracking Control
of Mobile Robots Using the Backsteeping Technique,
Proc. 5th. Int. Conf. Contr., Automat Robot. Vision,
Singapore, pp 1715-1719.
Lee, T-C., Tai, K., 2001. Tracking Control of Unicycle
Modeled Mobile robots using a saturation feedback
controller, IEEE Trans. On Control Systems Technol-
ogy, Vol. 9, No. 2, pp 305-318.
Pawlowski, S., Dutkiewicz, K. Kozlowski, Wroblewski, W.,
2001. Fuzzy logic implementation in Mobile robot
Control, 2th Workshop On Robot Motion and Control,
pp 65-70.
Tsai, C-C., Lin, H-H, Lin, C-C., 2004. Trajectory Track-
ing control of a Laser-Guided wheeled mobile robot,
Proc. IEEE Int. Conf. On Control Application, Taipei,
Taiwan, pp 1055-1059.
Song, K. T., Sheen, L. H., 2000. Heuristic fuzzy-neural
Network and its application to reactive navigation of
a mobile robot, Proc. IEEE Int. Conf. On Control Ap-
plication, Taipei, Taiwan, pp 1055-1059.
Pereira da Silva., 2000. Flatness of nonlinear control sys-
tems a Cartan-K¨ahler approach, In Proc. Mathemat-
ical Theory of Networks et Systems MTNS’2000,
pages 1 10, Perpignan, Jun. 19-23.
Jakubczyk, B., Respondek, W., 1980. On linearization of
control systems, Bull. Acad. Pol. Sc., Ser. Sci. Math.,
28: pp 517-522.
Hunt, L. R., Su, R. and Meyer, G., 1983. Global transfor-
mations of nonlinear systems, IEEE Trans. Automat.
Control, 28:24-31.
Charlet, B., L´evine. J., On dynamic feedback linearization,
Systems Control Lett., 13: pp 143-151.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
280
