
A FLEXIBLE ROBOTICS AND AUTOMATION SYSTEM
Parallel Visual Processing, Realtime Actuator Control
and Task Automation for Limp Object Handling
Thomas M
¨
uller, Binh An Tran and Alois Knoll
Robotics and Embedded Systems, Faculty of Informatics, Technische Universit
¨
at M
¨
unchen
Blotzmannstr. 3, 85748 Garching, Germany
Keywords:
Flexible automation, Parallel processing, Realtime actuator control, Limp object handling.
Abstract:
In this paper, an intrinsically parallel framework striving for increased flexibility in development of robotic,
computer vision, and machine intelligence applications is introduced. The framework comprises a generic
set of tools for realtime data acquisition, robot control, integration of external software components and task
automation. The primary goal is to provide a developer- and user-friendly, but yet efficient base architecture
for complex AI system implementations, be it for research, educational, or industrial purposes. The system
therefore combines promising ideas of recent neuroscientific research with a blackboard information storage
mechanism, an implementation of the multi-agent paradigm, and graphical user interaction.
Furthermore, the paper elaborates on how the framework’s building blocks can be composed to applications
of increasing complexity. The final target application includes parallel image processing, actuator control, and
reasoning to handle limp objects and automate handling-tasks within dynamic scenarios.
1 INTRODUCTION
These days, robots are common in industrial produc-
tion setups. They accompany assembly lines all over
the world, as they have interesting properties for pro-
duction processes: they never tire, provide high ac-
curacy, and are able to work in environments not
suitable for humans. Still, todays industrial robots
are often limited to very specific repetitive tasks, as
they must be statically programmed (“teached”) in ad-
vance. But industrial applications nowadays tend to
require greater flexibility, as the manufactured prod-
ucts become highly customized and thus the produc-
tion scenarios become more complex. Also, automa-
tion engineers strive to advance to production fields
like handling of limp or deformable objects, that have
not been considered before. In this context sensori-
motor integration, visual servoing, and adaptive con-
trol are some of the most prominent buzz-words being
investigated in the recent past by academics.
The flexible robotics and automation framework
presented in Section 3 refers to these topics and pro-
vides a generic, configurable, and interactive; but
nevertheless sound and efficient foundation for such
tasks. Section 4 then shows, how the proposed frame-
work can be used to build an application for robot-
assisted, semi-automated limp object handling.
2 RELATED WORK
This section elaborates on how the proposed frame-
work fits into findings / results of existing recent
research in related fields. Furthermore, common
robotics frameworks are mentioned and their relation
to the presented system is discussed.
2.1 Related Research
We find relevant sophisticated approaches primarily
within the area of cognitive and blackboard architec-
tures, or multi-agent systems.
Cognitive architectures originate from psychol-
ogy and by definition try to integrate all findings
from cognitve sciences into a general framework from
which intelligence may arise. Multiple systems have
been proposed to fulfill this requirement, including
Act-R (Newell, 1994; Anderson, 2007) and Soar
(Lehman et al., 2006). Although these approaches
may be biologically plausible and have the potential
to form the foundation of some applications in reality,
they all face the problem of being a mere scientific
289
Müller T., An Tran B. and Knoll A. (2010).
A FLEXIBLE ROBOTICS AND AUTOMATION SYSTEM - Parallel Visual Processing, Realtime Actuator Control and Task Automation for Limp Object
Handling.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 289-294
DOI: 10.5220/0002951002890294
Copyright
c
SciTePress

approach to cognition. We argue that, in order to de-
velop applications also suitable for industrial automa-
tion, a framework for intelligent robotics and senso-
rimotor integration has to be designed keeping this
scope in mind. Furhtermore, additional requirements
like robustness and repeatability, generic interfacing,
user-friendlyness and graphical interaction have to be
taken into account with high priority. Still, we are im-
pressed by the incredible performance of biological
cognitive systems and, although we do not propose a
cognitive architecture, try to integrate certain aspects
where we find them useful and appropriate.
The principle theory considering blackboard ar-
chitectures is based on the assumption, that a com-
mon database of knowledge, the “blackboard”, is
filled with such by a group of experts (Erman et al.,
1980). The goal is to solve a problem using con-
tributions of multiple specialists. We adopt the ba-
sic ideas of this concept in the implementation of the
information storage of the proposed framework (see
Section 3.3). Nevertheless, a drawback with tradi-
tional blackboard systems is the single expert, i.e., a
processing thread, that is activated by a control unit
(Corkill, 2003). There is no strategy for concurrent
data access in parallel scenarios. Futhermore, there
is no space for training an expert over time, e.g., ap-
plying machine learning techniques, or even exchang-
ing a contributor with another one in an evolutionary
fashion. We deal with these shortcomings within the
proposed framework and present our approach in Sec-
tion 3.2 and 3.3.
Finally, a multi-agent system (MAS) is a system
composed of a group of agents. According to a com-
mon definition by Wooldridge (Wooldridge, 2009) an
agent is a software entity being autonomous, acting
without intervention from other agents or a human;
social, interacting and communicating with other
agents; reactive, perceiving the environment and act-
ing on changes concerning the agent’s task; and
proactive, taking the initiative to reach a goal. Most
existing implementations (e.g., JADE (Bellifemine
et al., 2003)) use a communication paradigm based on
FIPA’s agent communication language (FIPA, 2002),
which is designed to exchange text messages, not
complex data items. Thus we instead implement
the blackboard paradigm which is capable of main-
tenance of complex items. Still, we acknowledge the
above definition and the fact, that agents may concur-
rently work on a task and run in parallel. The process-
ing units of our framework are hence implemented ac-
cording to these MAS paradigms.
2.2 Related Systems
The following paragraphs discuss some of the most
widespread robotics frameworks with respect to ap-
plicability for vision-based limp object handling and
automation in the target scenario.
Orca
1
adopts a component-based software en-
gineering approach without applying any additional
architectural constraints. The framework is open-
source, but uses the commercial Internet Communica-
tions Engine (ICE)
2
for (distributed) communication
and definition of programming language independent
interfaces. ICE provides a Java-based graphical user
interaction/control instance, but capabilities to incre-
mentally compose applications by connecting the ex-
ecutable nodes at runtime is very limited. One may
start/stop nodes, but the communication is established
using a publish/subscribe mechanism implicitly by
implementing the corresponding interfaces. So while
providing facilities for efficient distribution of tasks
on multiple computers, Orca lacks the required flex-
ibility when trying to automate tasks without time-
consuming reprogramming (runtime reconfiguration).
The Robot Operating System
3
(ROS) is another
open-source software framework striving to provide a
(robot-)platform independent operating system. The
framework uses peer-to-peer technology to connect
multiple executables (nodes) at runtime in a pub-
lish/subscribe way. A master module is instantiated
for the required node-lookup. An interesting fea-
ture of ROS is the logging and playback functional-
ity (Quigley et al., 2009) allowing for replication of
recorded data-streams for later usage, e.g., in a simu-
lation environment. Still, the framework lacks a facil-
ity to record an application configuration in order to
conveniently replicate an application setup for a spe-
cific task, e.g., load a pick- and place task descrip-
tion and execute it on various robotic setups. Mi-
crosoft’s Robotics Studio
4
, released in 2007, is a
Microsoft Windows specific .NET-based software li-
brary for robotic software applications. The fram-
work utilizes the Coordination and Concurrency Run-
time (CCR) and the Decentralized Software Services
Protocol (DSSP) for message processing and passing.
It includes a simulation environment and, most no-
tably, a convenient facility to develop applications in
a user-friendly graphical way. Still, it is closed source,
and in addition to that, “not an ideal platform for real-
time systems” (Jackson, 2007), since there is no guar-
antee, that a service is not interrupted.
1
http://orca-robotics.sourceforge.net
2
http://www.zeroc.com
3
http://ros.sourceforge.net
4
http://www.microsoft.com/Robotics
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
290

The open-source Player/Stage
5
project provides
another popular and widespread framework for
robotics. Here, a system typically comprises a
“player”, which implements a TCP-server on the
robot, and “clients”, the user control programs, such
as a joystick controller or a keyboard device, that may
connect to the server, send messages, and control the
robot (Vaughan and Gerkey, 2007). Although being
powerful, in the eye of the authors, Player/Stage is
rather complex to setup and application development
is not user-friendly. I.e., one needs to implement a
character device and a interface/driver model atop the
Player Abstract Device Interface (PADI), combine it
with the Player Protocol and finally implement the ap-
plication semantics, even for a simple pick- and place
task. The flexible robotics and automation system in-
troduced in this paper strives to overcome the draw-
backs of the aforementioned systems. Furthermore,
it incorporates the useful features of the above archi-
tectures to form a foundation for user-friendly limp
object handling applications.
3 SYSTEM OVERVIEW
From a software engineering perspective, an applica-
tion built atop of the proposed system is built from
three building blocks shown in Figure 1.
Figure 1: Building blocks of the flexible automation system.
These building blocks, namely the information
storage, processing units, and generic interfaces, are
introduced briefly in the following paragraphs.
3.1 Generic Interfaces (GI)
The first building block provides an easy-to-use inter-
face abstraction for accessing external hardware com-
ponents such as the realtime connectors for robot con-
trol, grippers and servos, or image sensors, user IO-
devices (mouse, keyboard, etc.), or other sensory de-
vices, e.g. force-torque sensors (FTS).
But implementing a generic interface is not lim-
ited to IO-devices, but indeed one can write an inter-
face to virtually any external component, be it soft-
ware or hardware. For instance considering soft-
5
http://playerstage.sourceforge.net
ware libraries, at the time of publication, the frame-
work already provides predefined interfaces to the ro-
bust model-based realtime tracking library OpenTL
(Panin et al., 2008) and the library underlying the effi-
cient EET (exploring / exploiting tree) planner (Rick-
ert et al., 2008) for advanced industrial robot con-
trol. Additionally, in order to support seamless in-
tegration with external applications, interfaces for ac-
cessing socket connectors for remote control, data ex-
change, and remote procedure calls are supplied by
the framework, as well as an interface for running ar-
bitrary executables.
3.2 Processing Units (PU)
The base class for processing data, the PU, provides
a configuration, control and feedback facility and a
possibility to share information with others. Further-
more, each processing unit is designed as a thread and
supplies a description of the action it performs to the
automation system (see Section 3.4).
Typically, an application comprises a set of PUs,
where PUs perform their action in parallel, either con-
tinuously or they are triggered by a start event. While
most hardware interfaces need a cyclic, continuous
update / retrieval (such as the robot joint values or the
camera interface), higher-level actions wrapped into a
PU, e.g. moving the end-effector from A to B, handing
a workpiece over to the next robot, or finding a grasp-
ing point in a visual scene, most commonly need a
trigger-event in an assembly workflow.
3.3 Information Storage (IS)
In order to map a complex assembly workflow, ex-
changing data between PUs is essential. For example
the input device unit maps to the target pose genera-
tion unit, which again maps to the joint values corre-
sponding to a robotic end-effector.
The singleton information storage supplied by the
framework is the building block designed for this pur-
pose. Figure 2 shows the workflow for data registra-
tion, storage, and retrieval modalities as a diagram.
As shown in the figure, after registering a data-
item, synchronous and asynchronous data access is
possible, i.e. PUs can either listen for the event gen-
erated, when a data item has changed in the storage,
or poll the data only when needed.
3.4 Task Automation
Tasks are generally described as a set of connected
actions, where each processing unit defines a such ac-
tion. In order to combine actions to a complex task,
A FLEXIBLE ROBOTICS AND AUTOMATION SYSTEM - Parallel Visual Processing, Realtime Actuator Control and
Task Automation for Limp Object Handling
291

Figure 2: Dataflow for a data item in the information stor-
age.
Figure 3: Processing units can be generated online to com-
bine a set of arbitrary actions into a more complex one for
automation.
a generic action description comprising an identifier,
IO and configuration parameters, etc., was developed.
Utilizing this action description, it is possible to spec-
ify a complex task by combination of primitive ac-
tions (e.g., operations like “grasp”, “screw”, “move-
to”).
Furthermore, the framework supplies an automa-
tion unit, which enables a user to transform a task
record into an action and generate a new processing
unit (see Figure 3) from it. Increasingly complex
tasks can be automated, as these composite actions
are provided to the user interface for further combi-
nation. Thus it is easy to quickly and conveniently
adapt, e.g., a production system to a novel product
variant requiring different assembly steps.
4 TOWARDS LIMP OBJECT
HANDLING
The following paragraphs show step-by-step, how the
application for limp object handling is implemented
using the framework’s building blocks.
4.1 A Simple Example
In a very basic, single threaded application example,
the PU shown in Figure 4 is designed for processing
data from and sending data to the robot and interac-
tion with a PC keyboard.
Figure 4: Application scheme for a simple keyboard con-
trolled robot.
The actual hardware components are accessed uti-
lizing the generic interfaces. The PU polls the robot
interface and the keyboard interface continuously in
an endless while-loop. Then, corresponding to the
key pressed by the user, a robot action is computed
and sent via the robot interface to the actual hardware.
Finally, a widget provides for feedback visualization
of robot movements. This widget is statically embed-
ded in a Qt-based graphical user interface, which is
updated cyclically by the PU.
Notably, no communication with other PUs is im-
plemented here, so the application does not need to
initialize an information storage.
Clearly, integration of all hardware interfaces and
computations into a single PU is non-optimal consid-
ering load distribution and parallelization. Therefore,
the next example shows, how this can be improved
using multiple PUs and the information storage.
4.2 Multiple PUs and Information
Sharing
Using the IS to share and exchange processing data
enables the application developer to decompose a
problem into semantically independent tasks and dis-
tribute them to multiple task-specific PUs.
Figure 5: Multithreaded application for keyboard control of
a robot.
Figure 5 shows a control system, where keyboard
/ mouse events are handled by the GI of the upper PU,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
292
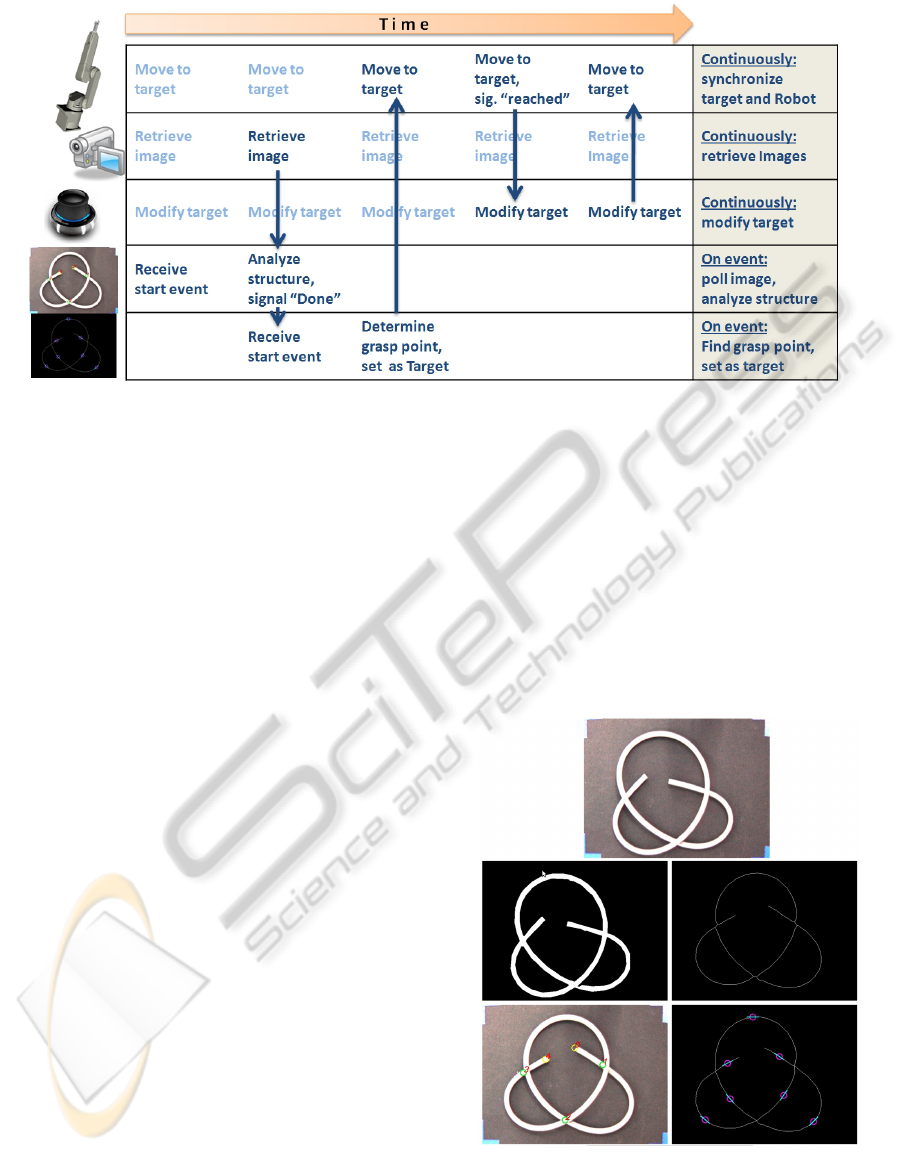
Figure 6: A workflow detail for automatically grasping a limp object from the table and handing it over at a pose defined
through user-interaction.
also offering some configuration options in the inter-
action widget (shown in the right part of the screen-
shot). The PU in this case posts a data item contain-
ing the user’s selection for the new target position of
the robot’s end-effector. The robot control unit imple-
ments a listener on that new target position. It com-
putes a trajectory to move the robot to the target and
sends the corresponding commands via the robot GI.
Note, that in the example the listener is not imple-
mented event based (i.e., it does not implement a slot
to the new target signal), but in an asynchronous man-
ner. This ensures, that the robot smoothly completes
a motion. Only after the movement has finished the
next trajectory may thus be computed.
4.3 Limp Object Handling
Concluding the application section, the following
paragraphs describe a rather complex limp object han-
dling application. Here, all the proposed concepts
from Section 3 are applied.
The application features a 6 DOF mouse-device
PU and a realtime robot control unit sending new po-
sition commands every seventh millisecond and si-
multaneously sharing feedback information (joint an-
gles and Cartesian pose of the end-effector). A sepa-
rate GUI-unit provides for visual feedback, additional
manual robot control through buttons and display of
the live-image and (semi-)processed images from the
IEEE1394 camera. In the application, a focus of at-
tention (FoA) unit implements the attention conden-
sation mechanism (M
¨
uller and Knoll, 2009). This ap-
proach speeds up visual processing by performing a
relevance evaluation on the visual field as it creates
regions of interest for salient areas appropriately.
A detail of the workflow for manipulation of a
limp object in the workspace of the robot is scetched
in Figure 6.
The figure shows three PUs performing continu-
ous actions, the robot control unit, the camera unit
and the mouse unit. Furthermore, two event-based
units are shown, one for analyzing the object struc-
ture (ends and intersections) and one for determining
a suitable point for grasping the object (see Figure 7
for a detail of the process).
Figure 7: From top to bottom: The region of interest, back-
ground segmentation, thinning, structure analysis and pos-
sible grasping points.
The application comprises four more units, which
A FLEXIBLE ROBOTICS AND AUTOMATION SYSTEM - Parallel Visual Processing, Realtime Actuator Control and
Task Automation for Limp Object Handling
293

are not shown. These are the FoA unit and the GUI
unit mentioned before, and an event-based gripper
unit. Using the forth one, the automation unit, the
user is able to compose an arbitrary workflow (the ap-
plication task), e.g., the one shown in Figure 6, by
connecting the IO-parameters of different units and
then transforming the task into a new PU, e.g., a “find-
and-grasp-object” unit.
5 CONCLUSIONS
The paper introduces a flexible robotics and automa-
tion system for parallel, asynchronous and decoupled
processing on hardware architectures like multicore
or multiprocessor systems.
A typical modular application developed with the
framework is an unordered set of instances of the
building blocks. The set may comprise a structure
of processing units; a blackboard for storage and ex-
change of data; and multiple interfaces to hardware
or external software components. Furthermore, the
proposed system incorporates facilities to generate
automation functions, for example from telepresent
teach-in or predefined action primitives.
As an example, the paper shows, how the robotics
system can be used to develop an application for limp
object handling, incorporating parallel visual process-
ing and realtime control of the actuator in a user-
friendly way.
ACKNOWLEDGEMENTS
This work is supported by the German Research
Foundation (DFG) within the Collaborative Research
Center SFB 453 on “High-Fidelity Telepresence and
Teleaction”.
REFERENCES
Anderson, J. R. (2007). How Can the Human Mind Occur
in the Physical Universe? Oxford University Press.
Bellifemine, F., Caire, G., Poggi, A., and Rimassa, G.
(2003). JADE: A White Paper. Technical report, Tele-
com Italia Lab and Universita degli Studi di Parma.
Corkill, D. D. (2003). Collaborating Software: Blackboard
and Multi-Agent Systems & the Future. In Proc. of
the International Lisp Conference.
Erman, L. D., Hayes-Roth, F., Lesser, V. R., and Reddy,
D. R. (1980). The Hearsay-II Speech-Understanding
System: Integrating Knowledge to Resolve Uncer-
tainty. Computing Surveys, 12(2):213–253.
FIPA (2002). ACL Message Structure Specification.
Technical report, Foundation for Intelligent Physical
Agents.
Jackson, J. (2007). Microsoft Robotics Studio: A Technical
Introduction. IEEE Robotics and Automation Maga-
zine, 14(4):82–87.
Lehman, J. F., Laird, J., and Rosenbloom, P. (2006).
A Gentle Introduction to Soar, an Architec-
ture for Human Cognition. 14-Sept-2009,
http://ai.eecs.umich.edu/soar/sitemaker/docs/misc/
/GentleIntroduction-2006.pdf.
M
¨
uller, T. and Knoll, A. (2009). Attention Driven Visual
Processing for an Interactive Dialog Robot. In Proc.
of the 24th ACM Symposium on Applied Computing.
Newell, A. (1994). Unified Theories of Cognition. Harvard
University Press.
Panin, G., Lenz, C., Nair, S., Roth, E., in Wojtczyk, M.,
Friedlhuber, T., and Knoll, A. (2008). A Unifying
Software Architecture for Model-based Visual Track-
ing. In Proc. of the 20th Annual Symposium of Elec-
tronic Imaging.
Quigley, M., Gerkey, B., Conley, K., Faust†, J., Foote, T.,
Leibs, J., Berger, E., Wheeler, R., and Ng, A. (2009).
ROS: an open-source Robot Operating System. In
ICRA 2009 Workshop on Open Source Software in
Robotics.
Rickert, M., Brock, O., and Knoll, A. (2008). Balanc-
ing Exploration and Exploitation in Motion Planning.
In Proc. of the IEEE International Conference on
Robotics and Automation.
Vaughan, R. T. and Gerkey, B. P. (2007). Software Engi-
neering for Experminetal Robotics, chapter Reusable
Robot Code and the Player / Stage Project, pages 267–
289. Springer tracts on Advanced Robotics. Springer.
Wooldridge, M. J. (2009). An Introduction to MultiAgent
Systems. John Wiley & Sons, 2nd edition.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
294
