
BIOMIMETIC CONTROL ALGORITHM FOR THE BALANCE
AND LOCOMOTION OF WALKING SYSTEMS
Nicu George Bîzdoacă, Anca Petrişor
University of Craiova, Faculty of Automation, Computers and Electronics, Caiova, Romania
Hani Hamdan
SUPELEC, Department of Signal Processing and Electronic Systems, Gif-sur-Yvette, France
Khalid Al Mutib
King Saud University, College of Computer and Information Sciences, Riyadh, Kingdom of Saudi Arabia
Keywords: Robotics, Biomimetic approach, Control strategy, Stable state transition.
Abstract: Implementation of active control has much potential to contribute to the creation and construction of
innovative structures. This paper summarizes recent research of the authors that is the study of biomimetic
control solutions regarding balance and locomotion of robotic systems. A first goal of the work consists in
identifying solutions necessary to balance the individual systems. Research has been focused both on
systems with a single foot, but also on biped, tripods, quadrupeds, hexapods and octopods. Static balance is
achieved by a proper mechanical design (Bizdoaca and Petrisor, 2009), but also by a corresponding load /
tensioning actuators systems that can compensate for inertial elements that can lead to system stability limit.
Theoretical studies have been focused on developing an efficient stepping algorithm in environment with
strong uncertainties, known as SSTA algorithm. The article present a series of experiments made with servo
actuated and smart actuated (based on shape memory alloy, especially) walking biomimetic structures.
1 INTRODUCTION
Biomimetics (or bionics, biognosis, etc.) is an
abstract of “good design from nature”. Roughly
speaking, biomimetics is the concept of taking ideas
from nature and implementing them in another
technology.This concept is actually very old, for
example, the Chinese wanted to make artificial silk
3,000 years ago. Some biomimetic processes have
been in use for years. An example is the artificial
synthesis of certain vitamins and antibiotics. More
recently, the biomimetic concepts, ideas and
applications are increasingly reported.
For example, the latest new biomimetic study
reported in the journal Nature, according to the
current picks of biomimetic issues, is actually from
studying how ants avoid traffic jams, which has
numerous implications for many scientists to rely on
the behavior of ants or other natural systems to give
them clues as to how to design computer systems
that avoid overcrowded networks. Another
biomimetic example, as commented by Philip Ball
in the 26 February 2004 issue of Nature in (
Hong,
and Bruce, 2004), is on the use of microbes in waste-
water that could make a handy household battery.
In a more general setting, according to
(Whatis.com), biomimetic refers to human-made
processes, substances, devices, or systems that
imitate nature. The art and science of designing and
building biomimetic apparatus is called biomimetics,
and is of special interest to researchers in robotics,
artificial intelligence (AI), nanotechnology, the
medical industry, and the military. Other possible
applications of biomimetics include nanorobot
antibodies that seek and destroy disease-causing
bacteria, artificial organs, artificial arms, legs, hands,
and feet, and various electronic devices. One of the
more intriguing ideas is the so-called biochip, a
microprocessor that grows from a starter crystal in
295
George Bîzdoac
ˇ
a N., Petri¸sor A., Hamdan H. and Al Mutib K. (2010).
BIOMIMETIC CONTROL ALGORITHM FOR THE BALANCE AND LOCOMOTION OF WALKING SYSTEMS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 295-300
DOI: 10.5220/0002951102950300
Copyright
c
SciTePress

much the same way that a seed grows into a tree, or
a fertilized egg grows into an embryo.
Biomimetics is now not at the stage in
generating new concepts and ideas because the
mother nature has already provided numerous
models for us to imitate. The key is the
implementation and development which is gathering
momentum only recently because the science base
can cope with the advanced techniques in various
areas such as biology, materials, electronics,
computing, communication and control etc. The idea
of extrapolating designs from nature and copying
them has entered into many areas of applied science,
most notably the synthesis of new materials. So, it is
no surprise that people tend to regard the
biomimetics as an interdisciplinary field in materials
science, engineering, and biology.
2 STUDY OF BIOMIMETIC
CONTROL SOLUTIONS BASED
ON THE BALANCE OF
INDIVIDUAL SYSTEMS
Studies of the authors have been focused to identify
the necessary solutions to ensure the individual
systems balance. The research have been directed
both on systems with a single foot, which made a
movement by jumping, but also on biped, tripod,
quadruped, hexapod and octopod systems.
Static balance is achieved by a proper
mechanical design [CMSM'2009], but also by a
corresponding load / tensioning of actuators systems
that can compensate the inertial elements that can
lead the system to the stability limit.
In addition to these studies for extension degrees
of freedom in order to provide a more efficient
navigation and balance control have been explored
and studies smart damping and actuation based not
only on servoactuators, but and to shape memory
materials and magnetorheological fluids.
The essential condition for static equilibrium
related to the position of the system gravity centre of
which projection must be inside the contact surface
described by the support elements (feet) of the
biomimetic system is, for jumping and biped
systems extremely difficult, while for ensuring a
dynamic balance the use of specialized control
architectures is required.
Figure 1: Study of biped locomotion.
Taking into account the human model, it is
observed that it has a balanced structure in addition
to appropriate state, and a sensorial system that
provides the driving of the muscular system to
compensate for factors that could lead to system
stability limit.
Therefore, to achieve the balance of studied
systems, it turned to a series of sensorial elements to
ensure the system proximity identification of the
stability limit, while an architectural simplification
of the system to ensure absolutely necessary degrees
of freedom for a dynamic compensation but much
more limited than the biological model.
These considerations are related to the
complexity of calculations necessary to some
systems with more degrees of freedom, respectively
considerations of ensuring the bionic system
mobility, especially with a lower energy
consumption.
Calibration bionic system proved to be a basic
element, that essentially influenced subsequent
locomotion of the mechatronic system.
Figure 2: Biped biomimetic structure.
An important component of the study was
focused on walking structures issues - quadruped,
hexapod and octopod structures.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
296

Figure 3: Octopod biomimetic structure.
Figure 4: Quatrupede biomimetic structure.
Consulting literature revealed some aspects of
the modalities and criteria for classification of
walking robots structures, thus achieving a hierarchy
in terms of biological models imitated, of physical
morphology, of functions they performed and of
locomotion strategy that they adopt.
In order to have a more complete image of the
themes (walking robots field), we focused on:
• walking stability issues of such robots
• design advantages of such morphologies
• issues of wide range of areas where they
prove their aplicability.
Conclusions resulted in this work led to the need
for a dual approach: intelligent design and balancing
of the mechanical system and implementing of a
system/algorithm that allows the achievement of the
instability system compensation or its approach to
the stability limit, by the dynamic analysis of the
specific conditions.
The developed algorithms should be simple,
robust, adaptive, sub-optimal for reasons related to
the response time.
3 STUDY OF BIOMIMETIC
CONTROL SOLUTIONS BASED
ON THE LOCOMOTION OF
INDIVIDUAL SYSTEMS
Individual systems locomotion behave correctly
identification of the control algorithm, but also, the
identification of some kinematic and dynamic
models, viable and efficient in implementing of
these algorithms through command and control
architecture.
Studies of systems moving by jumping with a
single leg, with 4 feet, respectively hiperredundante
systems, systems that have shape memory springs in
their structure, have revealed the effectiveness of
this type of solution for continuous monitoring of
the damping coefficient necessary at the contact with
the ground or for damping and driving of the
mechatronic architecture (Bizdoaca, 2009).
Figure 5: Mathematical model of a one-legged robot that
uses as damping element a shape memory spring.
Figure 6: Biomimetic structure type rabbit.
Experimental measurements in conjunction with
theoretical and practical work of the research team,
have enabled studies to be efficient.
BIOMIMETIC CONTROL ALGORITHM FOR THE BALANCE AND LOCOMOTION OF WALKING SYSTEMS
297

Figure 7: Biomimetic structure type frog. DTA and DSC
curves for 18.275mg from SMA spring.
The effect of the energesing smart damping
system is extremely efficient, numerical simulations
showing this.
Figure 8: Hopping robot trajectory for different energizing
temperatures of the SMA spring.
Particular attention was allocated for the
hiperredundante systems both regarding creeping
locomotion and handling structures as trunk type.
Kinematic study of walking systems was
performed both on the robot body movement in
space, given the motion laws of a rigid body in
three-dimensional space and on the robot foot
considering that it has a structure consisting of three
links and three degrees of freedom in relation to the
body, achieved by three rotational joints.
The rotation axes for the two joints which form
the hip are set to intersect orthogonally.
In the case of existing a defect of the bionic
architecture, locomotion was a complement of the
activity of the project.
In robotic structures, the faults may be caused by
external environmental conditions (operating
environment) or by internal conditions (structure,
sensors, actuators or control).
Faults monitoring system, according to its
complexity, may adopt the following control
strategies (from simple to complex): only detection
and location of faults and possible suggesting of
isolation actions and/or avoiding of fault
components; further robot movement until bringing
it into a safety state in a neighborhood of the end
point for major faults; the robot stop in a safety state
with maintaining of stability in the case of
catastrophic faults.
General techniques for detection and
identification of existing faults and those for
recovery after failure, can be applied to walking
robots systems, thus determining the operation space
under fault. For this purpose were determined the
operation areas of the walking robots feet as an
annulus sector. Overcoming these allowed operation
areas for each leg lead to interference problems.
To avoid this, were a prori eliminated all the
areas that can be overcome, so that each leg has its
own separate region.
Thus, it was defined for each leg one operation
area (called operation cell) having a rectangular
shape. Then it was analized, from kinematic point of
view, the case of existing a fault due to a blocked
joint of a robot leg. This analysis of the fault can be
extended to other robot legs because of the robot
symmetry.
Based on kinematic restrictions mentioned
above, were presented and justified fault-tolerant
locomotion algorithms for each considered case of
fault both for the straight line robot moving and for
a crab stepping type: robot locomotion tolerant at
first joint blocking, robot locomotion tolerant at
second joint blocking, robot locomotion tolerant at
third joint blocking.
4 IMPLEMENTATION OF THE
WALKING ROBOT CONTROL
ALGORITHM IN SSTA
STRATEGY
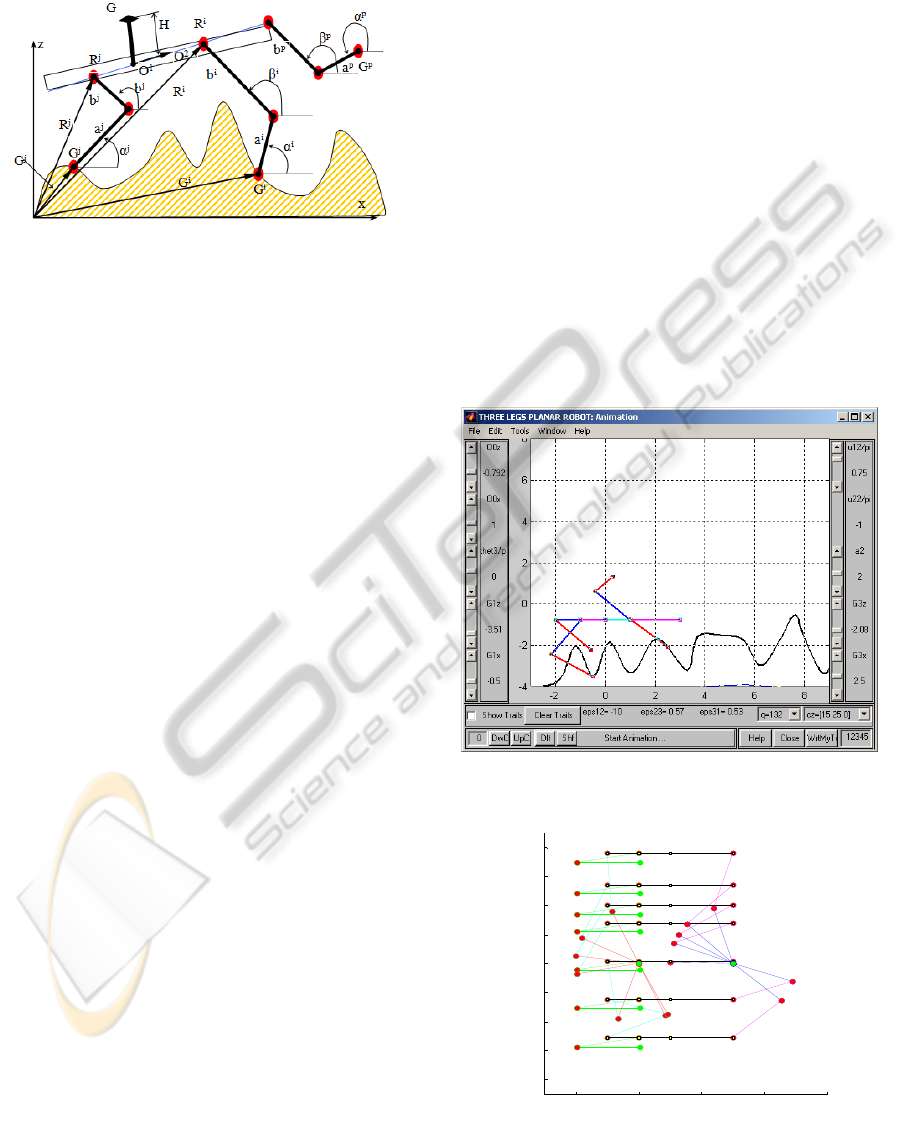
It is considered the walking robot structure as
depicted in Fig.9, having three normal legs L
i
, L
j
, L
p
and a head equivalent to another leg, L
0
, containing
the robot centre of gravity, G, placed in its foot. The
robot body RB is characterized by two position
vectors O
0
, O
1
and the leg joining points denoted R
i
,
R
j
, R
p
. The joining point of the head, L
0
, is the
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
298
central point O
0
, R
0
= O0, so the robot body RB is
univocally characterized by the set,
01ijp0
RB {O ,O , , , , }=λλλλ
Figure 9: The geometrical structure of the robot.
A robot leg, let us consider of index i, has a body
joining point R
i
expressed by a complex number and
the foot point denoted by the complex number G
i
. It
contains two joint segments defined by the lengths
a
i
, b
i
with the angles α
i
, β
i
. Here there are considered
three legs: i, j, p.
Due to the complexity of the evolution in an
environment with strong uncertaines, an efficient
walking algorithm which ensure stability and
locomotion of the robotic structure, must be
developped.
Stable States Transition Approach (SSTA)
control strategy applied for a hexapod structure is
proposed. By SSTA strategy is assured the walking
robots evolution in uncertain environments
subordinated to two goals:
- achievement of the desired trajectory expressed
by the functions
0
z
Of(x)= and (x)θ=θ , where x is
the ground abscissa and
0
x
Ox= ; it is considered the
evolution from left to right;
- assuarance of the system stability that is, in any
moment of the evolution the centre of gravity has to
be in the stability area.
Considering the walking robot as a variable
causality dynamic system it is possible to realize this
desideratum in different variants of assurance the
steps succession. The steps succesion suposes a
series of elementary actions that are accomplished
only if the stability condition exists.
Continuously, by sensorial means or using the
passive leg, the robot has informations about its
capacity of evolving on the ground. Every time it is
considered that the legs i, j are on the ground and the
the system is stable (
ij
[0,1]ε∈
). The passive leg
p
G
is which realises the walking.
By testing the ground is realized its division in
lots representing the fields on x axis which constitue
the abscissas of some points that can be touched by
the
p
G leg. A next support point given by the free
p
G leg , is chosen so that to existe a next stable state
ε
ip
or ε
jp
, taking into account the actual state of legs
activity.
A variant of mouvements succesion, composed
by 12 steps, was proposed in (Petrisor, 2008).
5 EXPERIMENTAL RESULTS
An experimental platform, called RoPa, has been
conceived. The RoPa platform is a complex of
MATLAB programs for simulation and control of
walking robots evolving in uncertain environments
according to SSTA control strategy. A number of
eight causality orderings of the robot structure have
been implemented on RoPa.
Figure 10: RoPa Graphic User Interface.
-2 0 2 4 6
-4
-3
-2
-1
0
1
2
3
4
RoPa1Ex2S5V1q132cz15250
x [m]
y [m]
Figure 11: The robot kinematics evolution.
BIOMIMETIC CONTROL ALGORITHM FOR THE BALANCE AND LOCOMOTION OF WALKING SYSTEMS
299
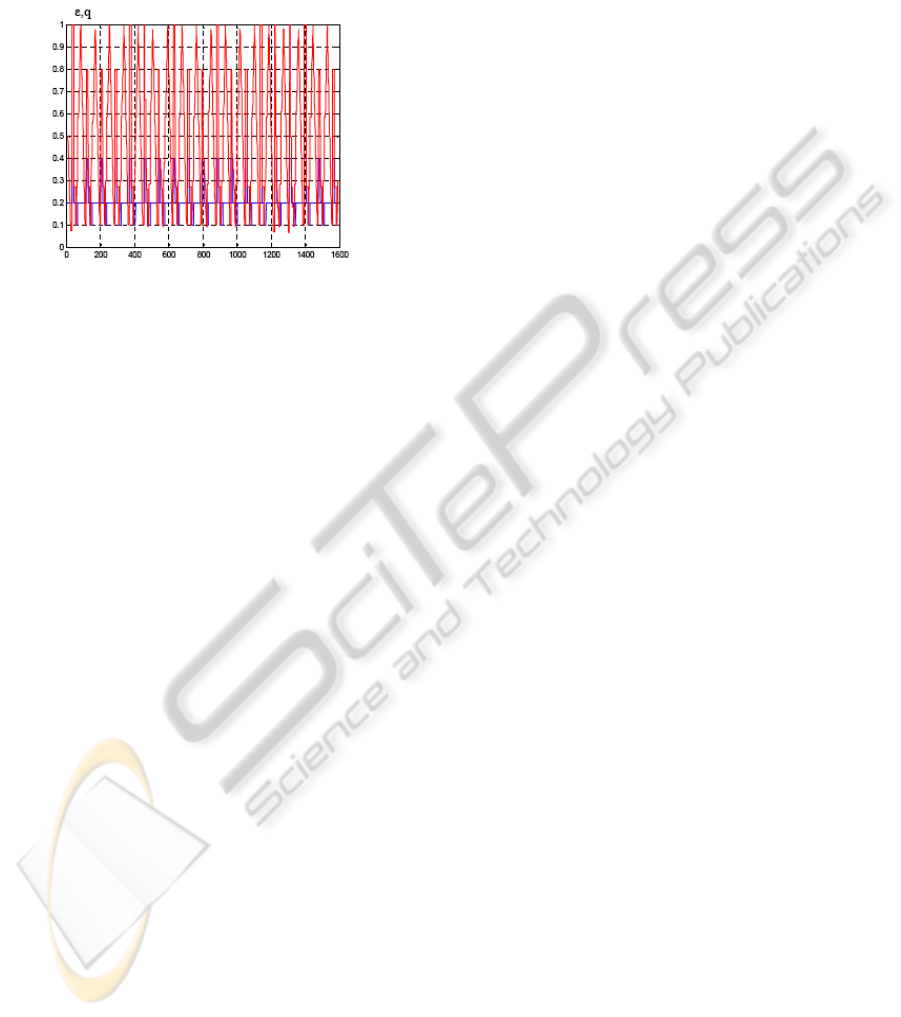
The stability of this evolution is graphical
represented by a stability certificate of the evolution
(Figure 12).
This certificate attests the stability index of the
active pair of legs in any moment.
Figure 12: The stability certificate of the evolution.
6 CONCLUSIONS
Experiments on walking structures, made in the
mechatronics laboratory, revealed the efficiency of
SSTA algorithm, providing a robot system stability
especially on hard terrain or with a high degree of
uncertainty regarding the nature and topography of
the contact surface. Using smart materials in the
structure of biomimetic mechatronic architectures
lead to an extension of the control capabilities.
These latter elements will be explored in subsequent
theoretical developments of research activity,
practical experimentation, empirical, currently
performed being extremely encouraging.
ACKNOWLEDGEMENTS
This report is part of the Romanian National
University Research Council (CNCSIS) contribution
to the project PNCDI – II - 289/2008.
REFERENCES
Bizdoaca, N. G, Tarnita, D., Petrisor, A., Diaconu, I.,
Bizdoaca, E.,2009. Control and design for biomimetic
application using smart materials. Annals of DAAAM
for 2009 & Proceedings of the 20th International
DAAAM Symposium, "Intelligent Manufacturing &
Automation: Theory, Practice & Education", Volume
20, Nr.1, ISBN 978-3-901509-70-4, ISSN 1726-9679,
pp. 0949-0950, Published by DAAAM International,
Vienna, Austria.
Bizdoaca, N. G, Tarnita, D., Petrisor, A., Bizdoaca,
E.,2008. Modular Adaptive Bionics Structure, WSEAS
TRANSACTIONS on BIOLOGY and BIOMEDICINE,
Issue 9, Volume 5, ISSN: 1109-9518, pag 229-238
Centre for Biomimetics, “What is biomimetics, http://
www.rdg.ac.uk/Biomim/brochure.htm.
Cubero S., 2001. A 6-Legged Hybrid Walking and
Wheeled Vehicle. 7-th International Conference on
Mechatronics and Machine Vision in Practice, USA.
Fulgenzi, C., Spalanzani A., Laugier C., 2007. Dynamic
Obstacle Avoidance in uncertain environment
combining PVOs and Occupancy Grid, Robotics and
Automation, 2007, pp.1610-1616.
Galt, S., Luk L., 1999. Intelligent walking gait generation
for legged robots. Proc. 2-th International Conference
on Climbing and Walking Robots.
Hong, L., Ramanathan, R., Bruce, L., 2004. Production of
electricity during wastewater treatment using a single
chamber microbial fuel cells, Environ. Sci. Technol.,
vol. 38, no. 7. 10.1021/es034923g, pp. 2281 – 2285.
Jung, S., Hsia, T.C., Bonitz, R., 2004. Force Tracking
Impedance Control of Robot Manipulators Under
Unknown Environment. IEEE Transactions on
Control Systems Technology, 12(3), 474-483.
Kiguchi, K., Watanabe, K., Izumi, K., Fukuda, T., 2000.
Application of Multiple Fuzzy-Neuro Force
Controllers in an Unknown Environment Using
Genetic Algorithms, Proc. of IEEE International
Conference on Robotics and Automation.
Kiguchi, K., Miyaji, H., Watanabe, K., Izumi, K., Fukuda,
T.,2000. Design of Neuro Force Controllers for
General Environments Using Genetic Programming,'
Proc. of the Fourth Asian Fuzzy Systems Symposium
(AFSS2000), pp. 668--673.
Nanayakkara, T., Watanabe K., Izumi, K., Kiguchi, K.,
2001. Evolutionary Learning of a Fuzzy Behavior
Based Controller for a Nonholonomic Mobile Robot in
a Class of Dynamic Environments, Journal of
Intelligent and Robotic Systems, Vol. 32, No. 3.
Petrisor, A., Bizdoaca, N., 2008. Stable States Transition
Approach - a new strategy for walking robots control
in uncertain environments. ISI Proceedings of the 4th
International Conference on Informatics in Control,
Automation and Robotics, Madeira, Portugal.
Petrişor, A, Bîzdoacă, N., 2008. Implementation of the
Stable States Transition Control Algorithm for a four
free joints Walking Robot. WSEAS Transactions on
Systems Journal, Issue 1, Volume 8, ISSN 1109-2777,
pp.107-116.
Schmuacer U., Schneider A. Ihme T., 1996. Six Legged
Robot for Service Operations.
Proc. of EOROBOT’96;
IEEE Computer Society Press, pp:135-142.
Thirion, B., Thiry, L., 2001. Concurent Programming for
the Control of Hexapod Walking. 7-th International
Conference on Mechatronics and Machine Vision in
Practice, USA.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
300
