
ROBUST 6D POSE DETERMINATION IN COMPLEX
ENVIRONMENTS FOR ONE HUNDRED CLASSES
Thilo Grundmann, Robert Eidenberger, Martin Schneider and Michael Fiegert
Siemens AG, Corporate Technology, Autonomous Systems, Munich, Germany
Keywords:
Object recognition, 6d Pose estimation, Multi-object scenarios, SIFT, Large database, One-hundred classes.
Abstract:
For many robotic applications including service robotics robust object classification and 6d object pose de-
termination are of substantial importance. This paper presents an object recognition methodology which is
capable of complex multi-object scenes. It handles partial occlusions and deals with large sets of different and
alike objects.
The object recognition process uses local interest points from the SIFT algorithm as features for object clas-
sification. From stereo images spatial information is gained and 6d poses are calculated. All reference data
is extracted in an off-line model generation process from large training data sets of a total of 100 different
household items. In the recognition phase these objects are robustly identified in sensor measurements.
The proposed work is integrated into an autonomous service robot. In various experiments the recognition
quality is evaluated and the position accuracy is determined by comparison to ground truth data.
1 INTRODUCTION
Object recognition comprises the tasks of object class
identification and pose determination. Although this
plays a major role in several scientific domains, many
current approaches to object recognition are limited in
their applicability due to inaccuracies in the pose de-
termination, the number of detectable objects or the
complexity of scenes. Object occlusions and the ap-
pearance of similar objects in the same image often
constitute problems to robust detection.
Figure 1: A service robot commonly operates in a complex
environment.
In this work we present a detection methodology
which allows accurate 6d object pose determination
and object class detection. It uses Lowe’s SIFT al-
gorithm (Lowe, 1999) for determining local, scale-
invariant features in images. The application of the
SIFT algorithm on stereo images from a camera pair
enables the calculation of precise object poses. This
appearance- and model-based approach consists of
two separate stages, Model generation and Object
recognition and pose determination.
Model generation is an off-line process, where the
object database is established by determining essen-
tial information from training data. We consider a set
of 100 household items of different or alike appear-
ance. The challenges lie in the reasonable acquisition
and efficient processing and storing of large data sets.
Object recognition and pose determination aims
on satisfactory object classification results, low mis-
classification rates and fast processing. The precise
detection of the object pose allows the accurate po-
sitional representation of objects in a common refer-
ence frame which is important to many tasks. The 6d
pose is described by 3 translational and 3 rotational
components and is formulated in continuousdomains.
The proposed method is embedded in a mobile
service robotics framework. Figure 1 shows theproto-
type. The robust and accurate object recognition sys-
tem is basis to continuing works such as object mani-
301
Grundmann T., Eidenberger R., Schneider M. and Fiegert M. (2010).
ROBUST 6D POSE DETERMINATION IN COMPLEX ENVIRONMENTS FOR ONE HUNDRED CLASSES.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 301-308
DOI: 10.5220/0002951403010308
Copyright
c
SciTePress

pulation (Xue et al., 2007), perception planning (Ei-
denberger et al., 2009) and physical object depen-
dency analysis (Grundmann et al., 2008), which point
out its importance.
Section 2 outlines current state of the art ap-
proaches to model generation and model-based object
recognition.
In Section 3 the data acquisition procedure and the
methodology for model generation is described. Sec-
tion 4 depicts the principles for object class identifi-
cation and 6d pose determination.
This paper closes with experiments in Section 5
which demonstrate the proposed theoretical concepts
on real data.
2 RELATED WORK
The problemof visual object pose estimation has been
studied in the context of different fields of application,
robotics or augmented reality to name two.
All approaches can be characterized by a number
of parameters like the number of dimensions of the
measured pose (mostly one, three or six), the restric-
tions on the objects to be localized (e.g. in shape,
color or texture), the ability to estimate the pose of
multiple instances of the same class in one image and
the capacity for various different classes in the model
database of the proposed system. Also the proposed
sensor system (mono/stereo camera, resolution), pro-
cess runtime and the achieved precision in the pose
are characteristic.
One of the earlier papers on object pose estimation
(Nayar et al., 1996) dealt already with the high num-
ber of one hundred different classes. Nevertheless the
measured pose in this case is only one-dimensional,
and the scene is assumed to have a black background
and no occlusion or objects of unknown classes in it.
Later on (Zhang et al., 1999) and (Walter and Arn-
rich, 2000) extended the estimated pose to 3DOF as-
suming the objects to be located upright on a table,
using one of five objects in their experiments.
Others (Kragic et al., 2001) restricted their ob-
jects to forms that can be modeled by wire frames
and achieved good results in full 6d pose estimation
examining two different objects. The quality of the
pose is indirectly evaluated by successful grasping.
True 6d pose measurement using local SIFT fea-
tures was demonstrated by (Lowe, 1999), describing
a method that is able to localize flat objects within
a range of 20 degrees, demonstrated on two scenes,
consisting of three different objects each, without
evaluation of the pose accuracy.
Azad et. al. presented a stereo camera based me-
thod (Azad et al., 2007) for full 6 DOF pose retrieval
of textured object using classic SIFT interest points.
The method requires the objects to posses flat sur-
faces for the stereo recognition, and the accuracy of
the pose estimation is not measured directly.
Recently Collet et al. presented a mono camera
object localization system (Collet et al., 2009), based
on SIFT features using ransac and mean shift clus-
tering. They also describe an almost fully automatic
process for the model generation and give some ex-
periments with four object classes where measured
poses are evaluated against ground truth. The error
is described by histograms over the translational and
rotational error.
Another model generation system is described in
(Pan et al., 2009) which is able to build a model online
from a video stream. The model is also built fully
automatically, additionally the user is assisted in the
image collection by guiding the direction to which the
object should be moved and by the visual feedback of
the emerging model.
A comprehensive taxonomic and quantitative
comparison of multi-view stereo model building
methods for dense models can be found in (Seitz et al.,
2006), sparse models are out of scope for this paper
though.
Our approach is comparable to the method of
(Collet et al., 2009), using a similar 3d model which
is not restricted in the shape based on SIFT features.
Through the use of stereo vision and thus conceptual
different methods for the pose determination a higher
accuracy in pose measurement is achieved.
Note, that an exact direct comparison is difficult
without perfect re-implementation, so we generated
translational and rotational histograms similar to the
ones in (Collet et al., 2009) which demonstrate a bet-
ter performance of our approach. But when it comes
to comparison, the main drawback to the research
done on six dimensional object localization is the ab-
sence of benchmark datasets.
3 MODEL GENERATION
Model generation aims on the acquisition of training
data and its processing to generate object class mod-
els. It is essential to filter significant data and effi-
ciently store it to enable reasonable processing times.
The KIT object modeling center IOMOS (Xue
et al., 2009) is shown in Figure 2 with its rotary
disk and the rotating bracket, where the sensors are
mounted on. A stereo camera system and a laser scan-
ner are used to acquire 360 stereo images for each
object and the 3d surface. Rotating the object on the
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
302

Figure 2: Object modeling center.
turntable and moving the sensors results in sensor data
at 360
◦
latitudinal and 90
◦
longitudinal angles in 10
◦
steps.
The build process starts with computing the SIFT
interest points (IPs) for each image and calculates 3d
points by triangulation of IPs in each stereo image.
Then matches over all images are determined and
equivalence classes from these matching IPs found.
At last each equivalence class is represented by one
descriptor and one 3d location. All these equivalence
class representatives together build up the model.
Now, each step of the build process is described in
detail.
1. SIFT Interest Points Calculation. The base for
the process are the SIFT interest points for each im-
age. Each SIFT interest point s
i
= (u, v, s, o, d
l
) con-
sists of the 2d location (u, v) in the image, its scale
s and its orientation o. d
l
denotes the l-dimensional
descriptor vector. For each training image the set
of interest points in the left camera image S
l
with
S
l
= {s
1
, ...s
n
} is determined. The interest point set
S
r
for the right camera image is acquired respectively.
2. Triangulation. 3d points are computed for cor-
responding IP’s in the left and right images. Corre-
sponding IP’s are determined by using the epipolar
constraint and SIFT descriptor matching. For every
IP in a left image V
l
we compute the epipolar line
L
e
in the right image V
r
and determine the subset
S
e
r
⊂ {s
i
∈ S
r
|dist(s
i
, L
e
) < ε
E
} with ε
E
as the maxi-
mum epipolar distance. Then, SIFT descriptor match-
ing is performed. It is important to do the epipolar ex-
amination before the SIFT matching step. This way
the set of possible matches is constrained to a region
in the image. IPs with similar descriptors from other
parts are not considered and cannot distort the result.
For each matched IP pair (s
i
l
, s
j
r
) the corresponding 3d
location and orientation are computed using triangu-
lation (Hartley and Zisserman, 2004) and transformed
into the objects coordinate system to get the spatial
feature representation:
s
#
= (x, y, z, x
′
, y
′
, z
′
, s, o, d
l
). (1)
The first three elements x,y and z denote the transla-
tional coordinates, x
′
,y
′
and z
′
represent the direction
from where the interest point is visible. Scale s, orien-
tation o and descriptor d
l
are equal to the parameters
of the 2d interest point.
3. Equivalence Relation. The next step aims at par-
titioning this set of 3d points into subsets originating
from the same physical point. This equivalence re-
lation is seeded from IPs with fitting appearance and
location and is completed by the transitive closure.
First candidates are found by appearance. The
enormous amount of data with on average 850 3d lo-
cations for each training view, 280000 for each object,
can be handled efficiently by means of a kd-tree. Us-
ing Euclidean distance in the SIFT descriptor space
the nearest n
N
- neighbors in the kd-tree are searched
for each s
i
#
.
n
N
depends on the sampling rate of the training
data as SIFT descriptors are only invariant within a
limited angular range and each face of the object is
only seen from a certain range of camera positions. It
was set to 150 in our case.
Then candidates are checked for their spacial fit
by projecting them to the view of their matching part-
ner both ways and calculating the Euclidean distance
in the image. If this distance, which is the expected
reprojection error, exceeds a threshold (5 pixel in our
system) the candidate is rejected. In rare cases it can
happen that two IP’s from the same view are in one
equivalence class. These IP’s are removed.
A standard connected component algorithm is
used to compute the transitive closure.
4. Subdivision and Representatives. We now seek
a simple representation for each equivalence class
above a minimal size v
min
. Very small classes (eg.
v
min
=4) are discarded to suppress IPs of low value for
the recognition process and noise.
When evaluating classes one finds the locations
clustering well, but descriptors to spread consider-
ably. This is not surprising since we do see most
points from a wide angle range were the SIFT descrip-
tor cannot be assumed to be invariant. Instead of more
complex density models we favor a very simple rep-
resentative, which is a simple mean for location and
normalized mean for descriptor. To make this simple
model suitable we sacrifice the simple relation, where
one class corresponds to one physical point, and split
classes with k-means until they can be represented as
spheres. This considerably simplifies and speeds up
the recognition process.
ROBUST 6D POSE DETERMINATION IN COMPLEX ENVIRONMENTS FOR ONE HUNDRED CLASSES
303

Figure 3: Sensor head: Stereo cameras and 3d-TOF camera
mounted on a pan/tilt unit.
The full model for one object needs about 5% of stor-
age of the initial SIFT features. This enables fast
recognition since big databases can be held in RAM
completely.
4 OBJECT RECOGNITION AND
POSE DETERMINATION
Many applications require a high pose determination
accuracy. To account for this we use a stereo cam-
era based approach, as preceding experiments using
a mono camera and the posit algorithm (Dementhon
and Davis, 1995) lead to unsatisfying results. Compa-
rable results were found in (Azad et al., 2009) which
showed that stereo approaches outperformmono cam-
era approaches by the factor of ≈ 2.
Our stereo setup on the robot (Figure3) consists of
two AVT Pike F-145C firewire cameras with a resolu-
tion of 1388 x 1038 pixels each, equippedwith 8.5mm
objectives and mounted with a disparity of 0.12m.
Precise intrinsic and stereo calibration of the cam-
eras is essential to our algorithms so they were carried
out with the Camera Calibration Toolbox for MAT-
LAB, using about 60 stereo image pairs of a custom
made highly planar checkers calibration pattern.
The recognition and localization process consists
of the following steps:
1. Calculate SIFT Interest Points. For each of the
stereo images, V
l
and V
r
a corresponding set of in-
terest points is calculated S
l
= {s
1
, ..., s
n
} and S
r
=
{s
1
, ..., s
m
}.
2. Find Correspondence to Object Models
(Figure4). For all elements s
i
∈ S
l
try to find up to
p
mm
multiple matches c
k
= {i, j} with a 3d feature
from the model database s
j
#
∈ M. The criterion for
a match is that the Euclidean distance in descriptor
space is below an absolute threshold p
tm
= 0.3. The
multiple match is needed, because with an increasing
Figure 4: Recognition principle: finding matches between
interest points s
#
∈ M from given models and interest points
detected in one image s ∈ S
l
(step 2).
number of object models in the database, the unique-
ness of a lot of features is lost. This happens in a non
ignorable way for household items that often follow a
corporate design and share large areas of texture.
To speed up the search for matches, the descrip-
tors from the database M are structured in a kd-tree
using the ANN library. To increase the performance,
the nearest neighbor search is approximated. The
quality of the approximation can be parameterized,
we used the value p
app
= 5.
3. Construct Stereo Interest Points. For all match-
ings c
k
= {i, j}, we try to find multi stereo matches on
the right interest point set S
r
. The epipolar constraint
is used in the same manner as described in Section
3.2, but after the epipolar spatial restriction, a relative
multi match is used. This has to be done to account for
the classic situation where multiple instances of the
same object class are placed side by side on a board,
leading to multiple similar features on the epipolar
line L
e
. After this procedure we obtain a set of l 3d
SIFT points S
#
=
s
1
#
, ..., s
l
#
by triangulation. Each
of these 3d SIFT points belongs to an object class, in-
dicated by its corresponding database feature s
j
#
. In
a system with t known classes this gives a partition
of S
#
=
S
1
#
, ..., S
t
#
, whereas some of these class de-
pending partitions might be empty. From here on, all
calculation is done separately for each object class.
4. Cluster within Class t. To account for scenes
with large numbers of identical objects and to deal
with the high number of erroneous 3d SIFT features,
we construct initial pose estimates P =
p
1
, ..., p
x
from S
t
#
. This is done by choosing randomly
non collinear triplets of 3d interest points from S
t
#
and check whether their mutual Euclidean distances
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
304

match those in the model database.
Within the 6d space of the initial pose estimates P,
qt-clustering (Heyer et al., 1999) is performed to find
consistent 6d pose estimates. The clusters consist of
6d poses p
x
which all correspond to a triplet of 3d
interest point S
t
#
. That way each cluster describes a
set of 3d interest points S
c
#
⊂ S
t
#
.
5. Pose Determination. All 3d interest points from
each cluster S
c
#
are used to determine the transforma-
tion of the database 3d IPs into the measured cloud
by a least squares pose fit (Figure 4). In the resulting
list of object classes and poses a similarity search is
performedto eliminate duplicate poses, which emerge
from imperfect clustering.
One important advantage of this 3d SIFT stereo ap-
proach is, that in contrast to other approaches it is able
to handle objects of any shape, as long as the object
fulfills the requirements on its texture that are inher-
ent to the SIFT algorithm. It is not generally bound to
the usage of SIFT features, so in the future improved
interest point methods could replace the SIFT inter-
est points. Note, that the parameters in the algorithm
strongly influence the performance and thus have to
be optimized to fit an application scenario.
5 EXPERIMENTS
The experiments we conducted should evaluate the
performance of our system in terms of detection rate
and pose accuracy. Since it is very difficult to acquire
pose ground truth data in complex scenarios we split
the evaluation into two parts. In the first part, we set
up scenes where the ground truth pose can be deter-
mined with a calibration pattern, leading to single ob-
ject scenes of low complexity. The detection rate in
these simple settings was 100%.
In order to evaluate our method in more realistic
scenarios, we set up a second test, based on complex
scenes consisting of up to 30 objects placed in arbi-
trary positions in a real environment supplemented
with unknown objects. This way the method’s robust-
ness against occlusion, object ambiguities and envi-
ronmental influences can be evaluated. In such sce-
narios, ground truth poses are not available, but it is
possible to evaluate the correctness of the detection
by visual inspection of the bounding volumes that are
projected into the images.
The time required for a one shot recognition of a
complete scene can be divided up into two parts: The
SIFT calculation takes about 0.6 seconds per image
Figure 5: Object with calibration sheet.
Figure 6: 1st row: objects, placed precisely onto the cal-
ibration pattern. 2nd row: Ground truth values projected
into image (dot cloud(red), bounding volume(yellow)).
on a 2GHz Intel multicore and the processing of the
poses takes 0.3 seconds without using the multi cores.
Note that there are some parameters like the kd-tree
approximation quality which strongly influence the
runtime of the processing part.
5.1 Evaluation of Pose Accuracy
To evaluate the system’s accuracy in the pose esti-
mation, we compared the recognition results of 260
scenes with ground truth. To acquire 6d ground
truth data we applied paper sheets with the projected
corresponding model onto the bottom of the objects
(Figure5). Since the origin of the objects is located in
the bottom plane, this method enables us to place the
object onto a calibration pattern with 3DOF and with
sub-millimeter accuracy.
In the test we placed one object per scene onto a
calibration pattern (Figure6) and measured its pose.
Using the camera’s pose with reference to the cali-
bration pattern which is determined using the Mat-
lab calibration toolbox, we transformed the ground
truth pose into the camera coordinate frame where
we compared it against the result of the recognition
algorithm. We selected seven different objects with
varying shapes for this experiment.
The distance of the objects origin and the camera
ranged from 0.42m to 1.25m (Figure 7/1). This area
was chosen from our experiences with the working
area of the mobile service robot.
Due to the relatively simple nature of the scenes
all objects were detected correctly, so we collected
260 pose measurement error vectors. As expected
ROBUST 6D POSE DETERMINATION IN COMPLEX ENVIRONMENTS FOR ONE HUNDRED CLASSES
305
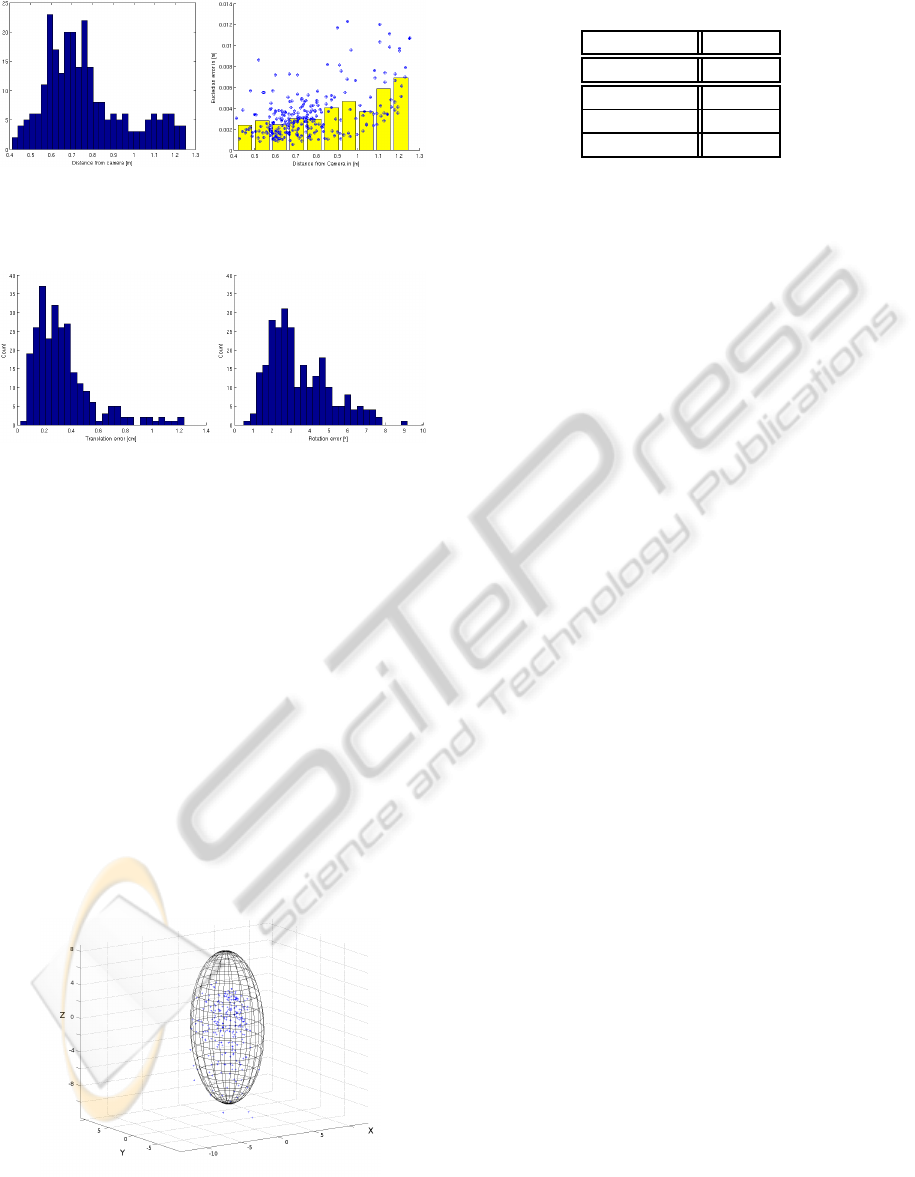
Figure 7: 1st: Histogram of object’s distance to camera over
the test set. 2nd: Translational error over distance (dots) and
the mean translational error over distance (bars).
Figure 8: Histograms of translational(in cm) and rotational
error(in ◦).
from the measurement principle, the results show in-
creasing translational errors with growing distance
(Figure7/2). For the evaluation of the rotational er-
rors, we calculated the minimal rotation angle from
the resulting 6d pose to the ground truth 6d pose. The
overall distribution of translational and rotational er-
rors are shown in Figure 8, the corresponding stan-
dard deviation of the translational error is shown in
Table 1.
To get a more expressive model of this mea-
surement process, we transformed the error into the
camera frame, and calculated the covariance for the
translational components of the measurement errors
(Figure9). As expected from the measurement princi-
ple, the standard deviation of the z
c
-component in the
camera frame is considerably higher as the standard
Figure 9: The xyz-deviations of all test scenes, depicted in
the camera frame, with its covariance ellipsoid (95% quan-
tile).
Table 1: Translational error in the camera frame.
stddev [mm]
k(x
c
y
c
z
c
)k
2
2.2436
x
c
1.3763
y
c
1.3617
z
c
3.4235
deviations in the other directions x
c
and y
c
(Tab.1).
Using this model it is possible to model detection in-
accuracies fairly precisely. Note, that the inaccuracies
also contain potential errors in the 3d models as well
as the bias from placing the object imprecisely onto
calibration pattern.
5.2 Object Recognition in Complex
Environments
In this experiment complex and cluttered scenes are
considered. A series of 60 images of different scenar-
ios at different locations are investigated. All contain
chaotic object arrangements including trained and un-
known, random objects. For the evaluation, all ob-
jects are categorized according to their distance from
the camera and to their occlusions. Thus, we differen-
tiate between close and far items and cluster the ob-
jects into fully visible, partly occluded and heavily
occluded ones.
Figures 10(a) and 10(d) show two scenes with the
initially labeled objects. Squares mark fully visible
objects, diamonds indicate partly occluded items and
circles denote heavily occluded ones. Close objects
are shown solid, far away objects as halves. The yel-
low area on the left of these images is not considered
for the stereo matching, so objects in this part of the
image are ignored for the recognition. The respective
detection and classification results for the two scenes
are illustrated in Figures 10(b) and 10(e). The bound-
ing volumes with respect to the 6d poses of the recog-
nized objects are projected into the image. In the first
sample, all objects are detected. However, a small
number of false positives can be recognized for the
salt boxes, the rye bread and the oil can. False pos-
itives are objects that are detected although they are
not physically there. They result from ambiguous ob-
jects with similar textures on several sides or similar
objects in the database, such as the three almost iden-
tical salts. In Figure 10(e) not all objects are recog-
nized because of heavier occlusions. Though, fully
visible ones are clearly identified. The successful de-
tection also depends on the lighting as the trained im-
ages were acquired under one specific lighting condi-
tion. Variations influence the recognition process.
By visual inspection the detection results are com-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
306
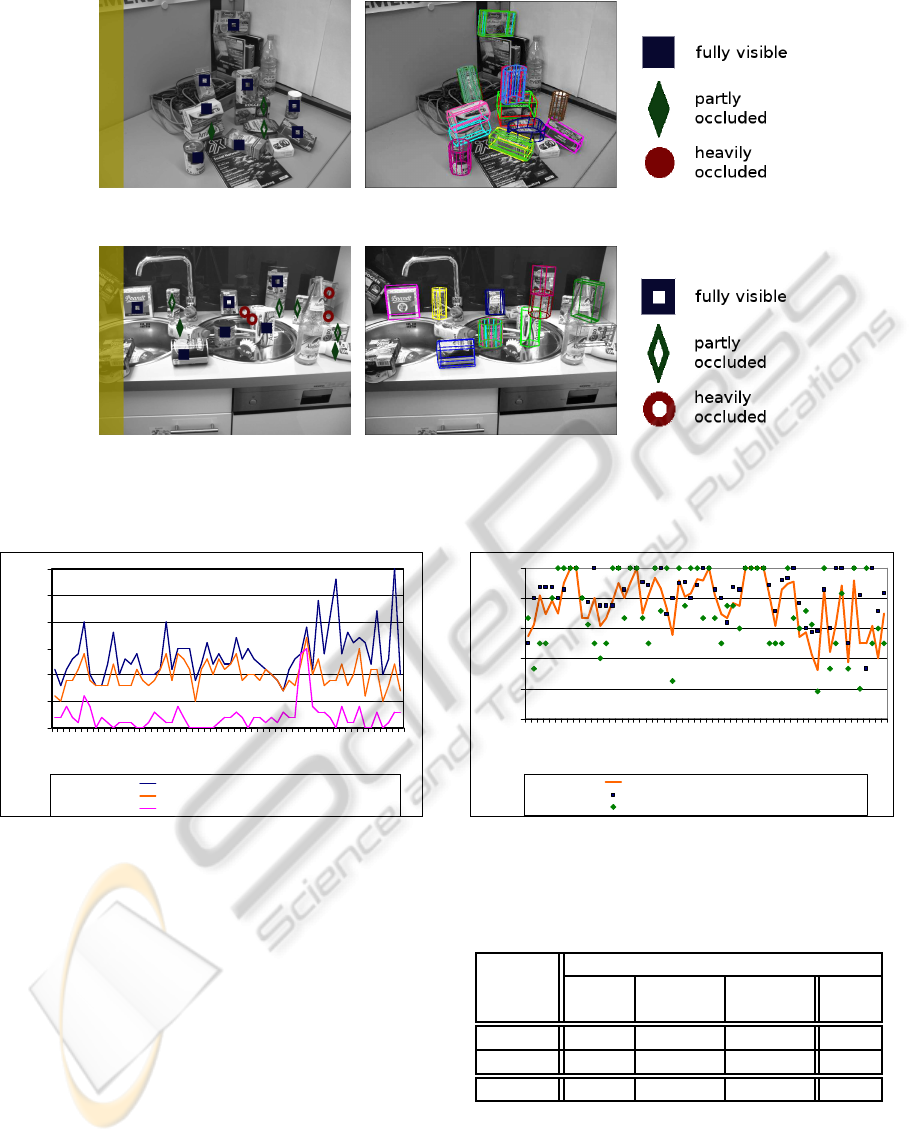
(a) Labeled office scene (b) Detection results (c) Legend (near ob-
jects)
(d) Labeled kitchen scene (e) Detection results (f) Legend (far objects)
Figure 10: One shot detection results for two complex scenes in a kitchen and an office environment. The results are evaluated
with respect to the a priori categorized objects.
0
5
10
15
20
25
30
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57
Test series
Number of objects
Total number of objects
Number of detected objects
False positives
Figure 11: Object detection results and false positives in
comparison to the total number of objects in scene for 60
different scenarios with a total of 826 objects.
pared to the pre-selection. The true positive and false
positive classifications rates are manually determined
by checking the class and pose recognition results.
Figure 11 shows the detection results of each of the 60
scenarios. The total number of objects in the scenes
ranges from 7 to 30. The number of recognized ob-
jects and the false positives for each scene are also
plotted. While the number of false positives is gener-
ally low, a few scenes with very dense object arrange-
ments showed more than 10 false object hypotheses.
In Figure 12 the detection rates are plotted. The
overall rates show the number of detected objects over
the total objects in the scene. The other curves depict
the rate of detecting fully visible objects and partly
occluded ones. The total recognition results over all
0
0.2
0.4
0.6
0.8
1
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55 58
Test series
Detection rate
Total detection rate
Fully visible detection rate
Partly occluded detection rate
Figure 12: Overall detection rate and detection rates of fully
visible and partially occluded objects.
Table 2: Object class detection results broken down to the
detection categories.
detection rates
fully partly heavily
distance visible occluded occluded total
near 0.863 0.763 0.179 0.796
far 0.813 0.593 0.167 0.617
total 0.846 0.684 0.170 0.722
scenes are listed in Table 2. Rates for each category
a separately and jointly determined. As expected,
closer objects perform better in the recognition. In
matters of occlusions, a decay can be recognized from
fully visible to heavily occluded items. The overall
detection rate of 72 per cent is lower than the peak
ROBUST 6D POSE DETERMINATION IN COMPLEX ENVIRONMENTS FOR ONE HUNDRED CLASSES
307

detection rate of 86 per cent for close and fully visi-
ble objects. The random object alignments with un-
favorable object poses, lighting influences and object
occlusions are reasons for recognition failures. How-
ever, considering the large database and the complex-
ity of the scenes the one shot recognition results are
promising.
6 CONCLUSIONS
We presented a system that is able to detect and lo-
calize objects from up to 100 different classes. The
6d detection accuracy of the object pose and the de-
tection rate are evaluated in extensive experiments,
which demonstrated a true positive detection rate of
72% in highly complex cluttered multi object scenes
with partly occlusions. The resulting pose errors had
a standard deviation of 3.4mm in the direction of the
camera (z
c
) and 1.4mm in x
c
and y
c
.
A satisfactory trade-off is found between fast pro-
cessing and good recognition rates and detection er-
rors and failure recognitions. The system is suitable
to applications in cluttered environments with random
object alignments and unknown objects.
In future works, we plan to include sparse bun-
dle adjustment into the model generation process to
increase the precision in the 3d models which is ex-
pected to increase the pose precision on the one hand,
but also to loosen the precision requirements on the
camera pose.
ACKNOWLEDGEMENTS
This work has partly been supported by the German
Federal Ministry of Education and Research (BMBF)
under grant no. 01IME01D, DESIRE.
REFERENCES
Azad, P., Asfour, T., and Dillmann, R. (2007). Stereo-
based 6d object localization for grasping with hu-
manoid robot systems. In IEEE IROS 2007.
Azad, P., Asfour, T., and Dillmann, R. (2009). Stereo-based
vs. monocular 6-dof pose estimation using point fea-
tures: A quantitative comparison. In Autonome Mo-
bile Systeme 2009, Informatik aktuell. Springer.
Collet, A., Berenson, D., Srinivasa, S., and Ferguson, D.
(2009). Object recognition and full pose registration
from a single image for robotic manipulation. In IEEE
ICRA 09.
Dementhon, D. F. and Davis, L. S. (1995). Model-based ob-
ject pose in 25 lines of code. International Journal of
Computer Vision, Springer Netherlands, Volume 15.
Eidenberger, R., Grundmann, T., and Zoellner, R. (2009).
Probabilistic action planning for active scene model-
ing in continuous high-dimensional domains. IEEE
ICRA 2009.
Grundmann, T., Eidenberger, R., and Zoellner, R. (2008).
Local dependency analysis in probabilistic scene esti-
mation. In ISMA 2008. 5th International Symposium
on Mechatronics and Its Applications.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
Heyer, L. J., Kruglyak, S., and Yooseph, S. (1999). Ex-
ploring expression data: Identification and analysis of
coexpressed genes. Genome Res., 9.
Kragic, D., Miller, A. T., and Allen, P. K. (2001). Real-time
tracking meets online grasp planning. In IEEE ICRA
2001, Seoul, Republic of Korea.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In International Conference on
Computer Vision, pages 1150–1157, Corfu, Greece.
Nayar, S., Nene, S., and Murase, H. (1996). Real-time 100
object recognition system. In IEEE ICRA 1996.
Pan, Q., Reitmayr, G., and Drummond, T. (2009). Pro-
FORMA: Probabilistic Feature-based On-line Rapid
Model Acquisition. In Proc. 20th British Machine Vi-
sion Conference (BMVC), London.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation of
multi-view stereo reconstruction algorithms. In IEEE
CVPR 2006.
Walter, J. A. and Arnrich, B. (2000). Gabor filters for object
localization and robot grasping. In ICPR 2000.
Xue, Z., Kasper, A., Zoellner, J., and Dillmann, R.
(2009). An automatic grasp planning system for ser-
vice robots. In 14th International Conference on Ad-
vanced Robotics (ICAR).
Xue, Z., Marius Zoellner, J., and Dillmann, R. (2007).
Grasp planning: Find the contact points. In IEEE Ro-
bio 2007.
Zhang, J., Schmidt, R., and Knoll, A. (1999). Appearance-
based visual learning in a neuro-fuzzy model for fine-
positioning of manipulators. In IEEE ICRA 1999.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
308
