
ROBOT SOCCER STRATEGY – BIOMIMETIC APPROACH
Nicu George Bîzdoacă, Coman Daniela
University of Craiova, Craiova, Romania,
Hani Hamdan
SUPELEC, Department of Signal Processing and Electronic Systems, Gif Sur Yvette, France
Khalid Al Mutib
King Saud University, College of Computer and Information Sciences, Riyadh, Kingdom of Saudi Arabia
Keywords: Robotics, Biomimetic Approach, Control Strategy, Cooperative Tasks.
Abstract: Biomimicry is the right pattern for a successful algorithm or control strategy. The present paper applies
biomimetic approach to robotic soccer game, using as model the human soccer team’s strategy. For
implementation the authors use a team of MIROSOT soccer robot, with three robots. Using software Simi
Scout a suitable tactics analysis can be extract from the games. Analyzing the real soccer game, a number of
attributes are specified and are embedded at different levels. The specified levels are interconnected and the
game analysis is processed for optimization. The authors approach offer a flexible and more complex
situation: all the robots can be attacking, defending or goalkeeper player. In this case the role changing
strategy is based on the distance between player and the ball, the payer and the goal area and the player and
the attack area. The controller for the attacking robot is designed using Petri nets. The Petri net model is
implemented in Petri Net Toolbox under MATLAB environment. Using this information the robot program
is adapted and the tests/games are experimented. The results are commented and improved control
architecture, based on practical results, is proposed.
1 INTRODUCTION
The nature’s inventions have inspired researchers in
developing effective algorithms, methods, materials,
processes, structures, tools, mechanisms, and
systems. Biomimetics is a new multidisciplinary
domain that includes not only the uses of animal-like
robots – biomimetic robots as tools for biologists
studying animal behavior and as research frame for
the study and evaluation of biological algorithms
and applications of these algorithms in civil
engineering, robotics, aeronautics. Multi-agent
system has emerged as a subfield of AI and helps to
understand and provide with theory and principles
for constructing complex systems with multiple
agents and their coordination/competition in
dynamical environments. The robot soccer game is
an interesting benchmark problem for the multi-
agent systems.
Generally spoken in robot soccer regarding the
division of labor between the components of a
soccer team, namely between the host computer
system and the autonomous mobile robots, three
system configurations are defined: 1. Remote
brainless system; 2. Robot-based system; 3. Vision-
based system.
The vision-based system can be described as the
step from the remote brainless to the robot based
system, as some of the intelligence is transferred
from the main computer to the single agents, but the
control of the vision system and the strategic
coordination still remain tasks of the host unit.
The Micro-Robot’ World Cup Soccer
Tournament (MiroSot) is the brainchild of Jong-
Hwan Kim (Coman, 2008) of KAIST, Korea and
was initiated in 1995. A mobile robot soccer team
consists of up to three micro mobile robots. Two
teams play soccer according to the rules similar in
433
George Bîzdoac
ˇ
a N., Coman D., Hamdan H. and Al Mutib K. (2010).
ROBOT SOCCER STRATEGY – BIOMIMETIC APPROACH .
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 433-436
DOI: 10.5220/0002954004330436
Copyright
c
SciTePress

nature to the real soccer game. The Federation of
International Robot Soccer Association (FIRA) has
established these rules.
The mechanical construction of the micro mobile
robot is based on a duralumin frame, on which two
DC motors with gear boxes and a controller board
are mounted.
Robot has two parallel wheels and in addition is
suspended by two slipper elements mounted at the
front and back part of the frame.
2 POLLING ROBOT SOCCER
STRATEGY FROM THE REAL
SOCCER GAME
The soccer robot game structure has 6 steps:
Step 1. Image acquisition and primary calculation
(distance, velocity, relative angle calculation etc.)
Step 2. Decide which posture is suitable for player
offensive or defensive.
Step 3. Determination of team strategy and
player profile assignment.
Step 4. Determination of the target position.
Step 5. Path planning.
Step 6. Calculation of the wheels’ moving
direction, velocity and displacement.
In order to have a successful team the secret are:
good player’s profile, good team strategy.
The player profiles are:
- Attack
- Midfield
- Defender
- Goalkeeper
Using Simi Scout a real game is analyzed and the
player profile is extracted (for this example is used
Romania Columbia, 1994, soccer game, and for
players profile, is used Romanian player profiles).
Using the real game information, the player
situations can be extracted. Let’s analyse , in detail,
the strategy for Attack player (Bîzdoacă et al.,
2005).
Assuming that the left half of the playground is
the opponent side, it is reasonable that the attacking
player must move to the right side of the ball as soon
as possible.
Figure 1: SimiScout analise for soccer game Romania-
Columbia.
3 PETRI NET MODEL FOR
ATTACKING SOCCER ROBOT
Petri nets, developed by Carl Adam Petri in his
Ph.D. thesis in 1962, are generally considered as a
tool for studying and modeling of systems. A Petri
net is foremostly a mathematical description, but it is
also a visual or graphical representation of a system.
A Petri net can be analysed in order to reveal
important information about the structure and
behaviour of the modeled system. The information
may for instance suggest improvements to the
system.
A Petri Net consists of a number of places and
transitions with tokens distributed over places. Arcs
are used to connect transitions and places. When
every input place of a transition contains a token, the
transition is enabled and may fire. The result of
firing a transition is that a token from every input
place is consumed and a token is placed into every
output place. The firing of transitions represents
causality and inferencing relations. Petri nets have
been generalized by allowing multiple token arcs,
inhibitor arcs, place capacity, colored tokens etc.
(Peterson, 1981).
Formally, the structure of a Petri net, defined by
its places, transitions, input function and output
function (Coman, 2008), (Kim et al., 2004).
The Petri net model (Kim et al., 2004) for the
attacking soccer robot modeling the real situation,
has been designed so that the topology to contain the
following situations in which the attacking robot
can be, as follows:
a) The attacking robot is behind the ball;
b) The attacking robot kicks the ball;
c) The attacking robot is in offside position;
d) The attacking robot is in contact with ball and
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
434
the ball is situated behind the robot.
In state (a) the attacking robot is in a probable
position to kick, in state (b) it is kicking the ball, in
state (c) it is in front of ball, so should be careful to
avoid the offside position, and in state (d) it is in
contact with ball.
With these four states, the Petri-net for the
attacking robot controller is formed. “Angle” is used
to refer to the angle between the heading direction of
the attacking robot and ball. “Distance” is used to
refer to the distance between the attacking robot and
ball in pixels. In state (a), the attacking robot is
ordered to move to ball and kick it. In state (b), if
“Angle” is above 45° , or “Distance” is more than 20
pixels, the attacking defense robot goes to state (a).
In state (a), if the ball is on the right side of attacking
robot (offside position), it should go to state (c). In
state (b), if the attacking robot fails to kick the ball,
the robot goes to state (c). In state (c), the attacking
controller orders the robot to move sideways and it
comes behind the ball without touching it and goes
to state (a). In state (c), if “Distance” is below 10
pixels, the robot goes to state (d), so it should move
away from the ball till “Distance” is above 20 pixels
and then can get into state (c).
Analyzing the situations for Goalkeeper player,
for Defender and for Midfield we can generalize the
situations as:
p
1
) The robot is behind the ball;
p
2
) The robot kicks the ball in the opponent
direction;
p
3
) The robot is in unwanted position;
p
4
) The robot is in contact with ball and the ball is
situated behind the robot.
Using Simi Scout a set of attributes are assured.
Statistically, after analyzing the all attributes
proposed, only 7 are retained and become transition
for our algorithm:
t
1
. Tries to kick the ball, though it is not in a good
position to kick,
t
2
. In front of the ball and at the following instant it
is in a good position to kick,
t
3
. In front of the ball, and moving to an unwanted
position,
t
4
. In unwanted position and escaping from that,
t
5
. Misses the ball, and is in front of the ball,
t
6
. In unwanted position, and then in contact with the
ball and behind, and
t
7
. Away from the ball and behind, but still in an
unwanted position.
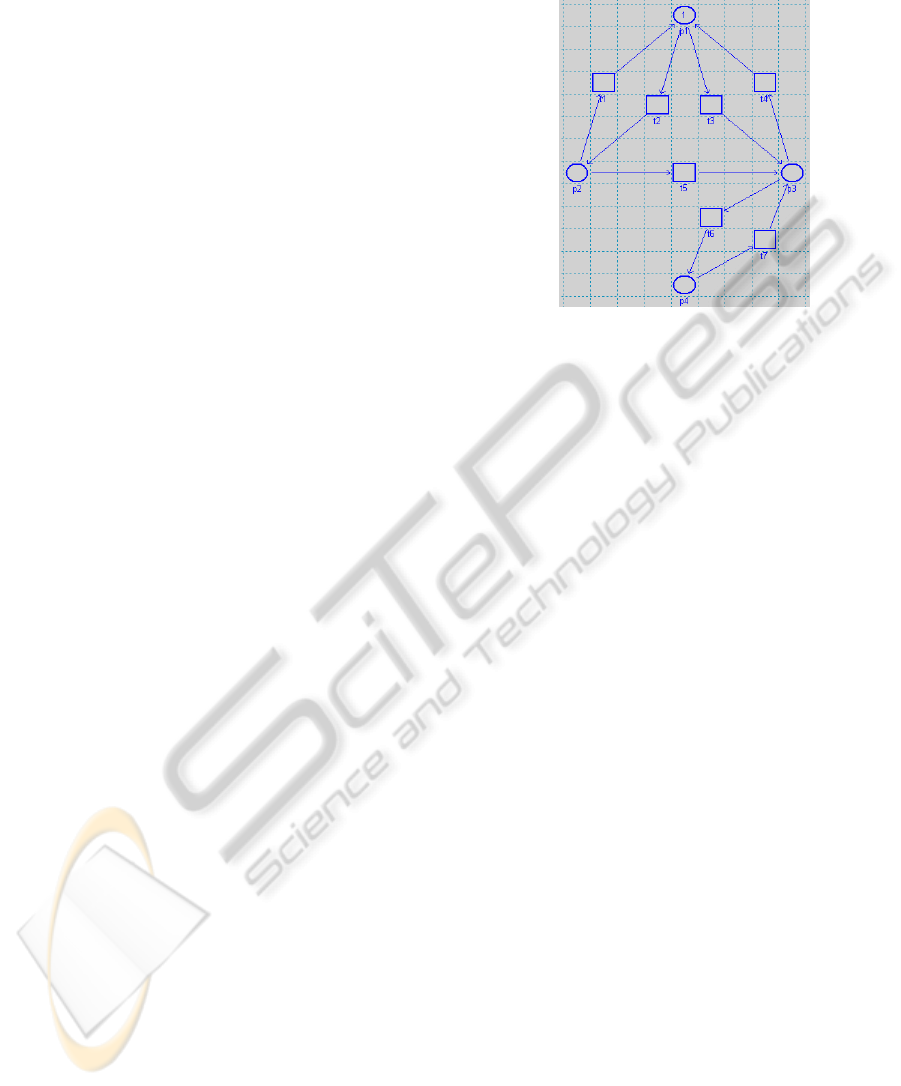
The incidence matrix has rank 3, so that the Petri net
model shown in Fig. 2 will have:
m - rank (A) = 1 ⇒ at most 1 P-invariants are
linearly independent,
n − rank(A) = 4 ⇒ at most 4 T-invariants are liniarly
independent.
Figure 2: Petri net model for the soccer robot.
As every robot has the same strategy, the role for
attack, defender, midfield or attack can be easily
switched between the robots. The roll will be
assigned dynamically, be image analyze.
A role assigned it is means that the intervention
area of the robot is in:
• Attack Area
• Midfield Area
• Defense Area
• Goalkeeper Area
The ball position will switch the team strategy.
The team strategy extracted (from Romania –
Columbia 1994 - soccer game - using Simi Scout
software) is:
- If the ball is in attack area then 2 player are
attack player, and the nearest player to midfield
area is midfield
- If the ball is in the midfield area, then 2 player
are midfield player, and the nearest player to
defense area is defender
- If the ball is in defense area, then 2 players are
defense player, and the nearest player to goal
area is goalkeeper.
5 NUMERICAL SIMULATION
AND EXPERIMENTS
The results from the mathematical method of
checking through the invariants method associated
transitions and the corresponding positions after
calculating the incidence matrix of the net have been
validated through the simulations using Petri Net
Toolbox in Matlab environment.
ROBOT SOCCER STRATEGY - BIOMIMETIC APPROACH
435

Table 1: Global Statistics Places.
It was validated in this way that the net topology, the
evolution of (their dynamics), as well as structural
and behavioral properties. The following two tables
(Table 1- Global Statistics Places and Table 2 -
Global Statistics Transitions) present the complete
lists of global indices associated with the places and
the transitions considered in the architecture of Petri
net that modeling the controller for attacking robot.
Table 2: Global Statistics Transitions.
Also, the special options of Petri Net Toolbox,
which confers a high capacity of analysis, has made
possible a synthesis of this Petri net model which
allows exploring the dependences of global
performance indicators associated with the net
positions/transitions on two “Design Parameters”.
6 CONCLUSIONS
The research proposes a biomimetic algorithm based
on analyzing the real situation (Peterson, 1981). In
this paper, a Petri net model is used for designing a
low level controller for the soccer robots. The
presented controller did not use the information of
opponent team. A future development of this
research will add the opponent predicted strategy
and a more dynamical switching strategy. Using a
single model robot controller offer advantages in
terms of implementation, but the team strategy can
be easily indentified by the opponent and
annihilated. The Petri net model presented is
implemented in MATLAB environment. The
simulations studies was validated that the net
topology, the evolution of (their dynamics), as well
as structural and behavioral properties and was
provided the global performance indices associated
with the places and the transitions and also the
whole set of global indices associated with all the
nodes of the net. Finally, the feasibility of the
proposed architecture is demonstrated by the
experimental results.
Figure 3: Dependency of the Queue length index
associated p
1
position.
Figure 4: Dependency of the Queue length index
associated p
3
position.
ACKNOWLEDGEMENTS
This report is part of the ROMANIAN NATIONAL
UNIVERSITY RESEARCH COUNCIL (CNCSIS)
contribution to the project PNCDI – II - 289/2008.
REFERENCES
Coman D..2008. Using Petri Nets in the Soccer Robot
Control Architecture, Annals of DAAAM. pp. 295 –
296.
Bîzdoacă N. G., Degertu S., Diaconu I. 2005. Behavior
based control for robotics demining. International
Symposium on System Theory, SINTES 12, ISBN 973-
742-148-5, 973-742-152-3, pp. 249-254.
Kim J. H., Kim D. H., KimY.J., Seow K.T.,2004. Soccer
Robotics, Springer-Verlag.
Peterson J. L.,1981. Petri net theory and modelling of
systems, Prentice-Hall Inc.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
436
