
MODEL OF KNOWLEDGE SPREADING FOR MULTI-AGENT
SYSTEMS
D. Oviedo, M. C. Romero-Ternero, M. D. Hern´andez, A. Carrasco, F. Sivianes and J. I. Escudero
Departamento Tecnolog´ıa Electr´onica, Universidad de Sevilla, Sevilla, Spain
Keywords:
Multi-agent system, Knowledge sharing, Knowledge spreading, Ontologies (artificial intelligence), Open sys-
tems, Software engineering, Agent communication, Automatic control system, Interoperability model.
Abstract:
This paper presents a model to spread knowledge in multiagent-based control systems, where simplicity, scal-
ability, flexibility and optimization of communications system are the main goals. This model not only implies
some guidelines on how the communication among different agents in the system is carried out, but also de-
fines the organization of the elements of the system. The proposed model is applied to a control system of
a solar power plant, obtaining an architecture which optimizes agents for the problem. The agents in this
system can cooperate and coordinate to achieve a global goal, encapsulate the hardware interfaces and make
the control system easily adapt to different requirements through configuration. The model also includes an
algorithm that adds new variables in the communication among agents and enables flow control knowledge in
the system.
1 INTRODUCTION
A goal of control systems is to enable the integration
of different types of devices in a scalable and flexible
system. The problem is how communications among
the different parts of the system is organised and op-
timized (Huget, 2003).
The control systems have evolved to a complex
system that employs more and more equipment and
sensors. The hardware diversity of the sensors and
actuators greatly affects the portability of the con-
trol system and the complexity may differ from each
other. A solar powerplant control system (CARISMA
Project) is inserted in this paper. It has a distributed
input-output agent architecture to accomodate the
changing requirements. This distributed intelligent
agent architecture provides flexible and scalable ways
to integrate the different sensors and actuators. The
design goal is to create a system architecture that
is general enough to support many different kinds
of sensors and actuators, while being distributed and
scalable.
To resolve problems in the control system it is nec-
essary have knowledge and experience working in the
field. In the case presented, the solutions to control
problems will be the responsibility of different agents
in the system. The agents should handle the problem
domain knowledge and be able to communicate this
knowledge in order to provide efficient solutions and
recommendations. In addition to the system architec-
ture, we propose a model for spreading the knowl-
edge of agents within this architecture. This model
presents an organizational scheme of agents and a
global communication protocol. The model was con-
structed to support a wide range of control systems;
however, this paper focuses on its application in the
control of a solar power plant.
2 PROBLEM DOMAIN
The problem discussed here belongs to the field of
distributed control systems, particularly in the prob-
lem of knowledge spreading in distributed network
agents of control. An introduction to the subject and
issues can be found at (Li et al., 2008), (Yang et al.,
2009). Control systems based on the theory of mul-
tiagents, and restricted to specific domains have been
developed. For instance, one of the early works by
(Wang Junpu, 2000) discusses the feasibility of agent-
based distributed hierarchical intelligent control. An-
other study examines the modeling of multiagent con-
trol for energy infrastructures (Sebastian Beer, 2009)
that presents an agent-based control system for dis-
tributed energy resources in low voltage power grids.
Knowledge representation mechanisms primarily
326
Oviedo D., C. Romero-Ternero M., D. Hernández M., Carrasco A., Sivianes F. and I. Escudero J. (2010).
MODEL OF KNOWLEDGE SPREADING FOR MULTI-AGENT SYSTEMS.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
326-331
DOI: 10.5220/0002973803260331
Copyright
c
SciTePress

used for sharing of knowledge among agents, has
also been a focus of research. For instance, the use
of mathematical logic, for knowledge representations
and exchange among agents has been explored in
(Alessio Lomuscio, 2000). However, our focus is on
using ontologies for knowledge.
Within this domain, the most important aspect
that we discuss concerns the spread of knowledge
in control systems based on multiagents. In (Mara
Adela Grando, 2006) the study of knowledge trans-
fer and action restriction among agents in multiagent
systems founded on the definition of patterns of di-
alogues between groups of agents, are expressed as
protocols. In this paper we focus in the organization
of the elements of the system and the flow of infor-
mation within the system, with the aim of creating a
simple and optimized model.
3 MODEL OF KNOWLEDGE
SPREADING
In multi-agent systems, one important aspect is the
sharing of knowledge among agents. To share knowl-
edge it is necessary to conceptualize the problem
domain and this should be common to all agents
(Knowledge Representation). It is also necessary to
define the processes for sharing knowledge or acquir-
ing knowledge by an agent. The following section
presents our model for the implementation of these
aspects discussed.
3.1 Knowledge Representation in the
Agents
Traditionally, agent knowledge representation is done
through what is called Ontologies (Colomb, 2007).
Ontologies define a set of elements as Predicates, Ac-
tions of agents, Concepts, Primitives, Expressions,
Variables, etc. In the case of control systems, the em-
phasis is mainly on the concepts and actions that an
agent could handle while other elements are more in-
tended for communication tasks.
The concepts can be easily represented by data
structures. In our CARISMA project, these concepts
will refer to the different variables that are neces-
sary to manage in order to make a solar panel con-
trol. These concepts can be stored locally on each
agent or centralized, but in any case, the concepts
must be shared by agents, so that they can commu-
nicate. The mechanisms used to update concepts can
be based on simple broadcasting of messages, updat-
ing a central database accessed by the various agents
to learn the concepts used or in distribute mechanisms
(Sebestyenova, 2005).
The actions of the agents are modeled by expert
systems (Yanping Du, 2005), using facts and rules.
These rules represent real actions on devices such as
reporting recommendations, faults or alarms in the
system that have been located by one or more agents.
Also these rules in an agent may represent the action
required to share knowledge with other agents or to
update their own knowledge. The mechanisms for up-
dating expert systems agents are outlined in the next
sections.
3.2 Knowledge Sharing by Agents
To spread the knowledge in a multi-agent system, it is
necessary that agents are equipped with mechanisms
for communication of this knowledge through the net-
work that interconnects them. These mechanisms are
usually based on communication primitives (Walton,
2003; Milner, 1994) defined in the ontology of the
system.
In order to improve the reliability of the recom-
mendations and proceedings of a multi-agent con-
trol system, we propose to label the knowledge that
spreads through the network. Such labeling would
be based on two concepts: the reliability of infor-
mation and the reputation of the agent that has com-
municated the information. The reliability indicates
the level of credibility of the received information by
an agent, while the reputation indicates the degree of
trust that the recipient agent has regarding the agent
which transmitted the information. These labels can
be represented as a percentage. In the transmission
of information, the transmitter adds informationabout
the reliability to the knowledge and labels the reputa-
tion for the receiver.
3.3 Knowledge Acquisition by Agents
When an agent receives a message from another agent
which carries new knowledge or an update existing
knowledge, there must have a process / task, designed
to update the expert system of the destination agent
(Dongliang et al., 2008). These processes operate di-
rectly on the agent’s knowledge base, so additionally
we propose an algorithm that considers the labels that
are associated with knowledge: reliability and reputa-
tion.
In the algorithm the variable newK represents the
new knowledge, SA is the source agent and DA is the
destination agent, newFb and fb are the new fiabil-
ity and the fiability label respectively, rp is the rep-
utation label of source agent .OldK refers to the old
MODEL OF KNOWLEDGE SPREADING FOR MULTI-AGENT SYSTEMS
327
knowledge stored in the destination agent. Depend-
ing on the results of that algorithm, it is determined if
the knowledge update process will take place or not
in the agent.If the algorithm opens the way to update
the information for the agent, it also indicates the la-
bels of reliability and reputation of the new knowl-
edge gained.
Below is the algorithm written in pseudocode and
details of its operation , as well as the set of functions
that are used in it.
Algorithm 1. acquisitionKnowledge.
if not hasKnowledge(DA,newK)
if acceptByReputation(DA,SA)
newFb=newK.fb/SA.rp
insertKnowledge(DA,newK,newFb)
else
discardKnowledge(DA,newK)
endif
else
if acceptByReputation(DA,SA)
if(oldK.fb <= newK.fb)
newFb=newK.fb/SA.rp
updateKnowledge(DA,oldK,newK,newFb)
else
if confirmKnowledge(DA,newK)
newFb=newK.fb/SA.rp
updateKnowledge(DA,newK,newFb)
else
discardKnowledge(DA,newK)
endif
endif
else
discardKnowledge(DA,newK)
endif
endif
If the information is new knowledge (not has-
Knowledge) then the destination agent will check the
reputation it has of the source agent (acceptByRep-
utation, for example based on a threshold). When
the new knowledge is accepted by reputation, then
the algorithm gets the value of the new label of re-
liability (such as the division between the reliabil-
ity of information and the value of reputation of the
source agent) and the new knowledgeis inserted in the
agent’s knowledge base stations (insertKnowledge).
In other cases, new knowledge is discarded (discard-
Knowledge). If the information is an update of knowl-
edge that is already possessed by the agent destination
and is accepted by the reputation of the destination
agent then there are two cases. In the first case, label
reliability of old knowledge is lesser or equal to the fi-
ability of new knowledge, in which case it updates the
knowledge base of the agent (updateKnowledge). In
the second case, the reliability of the new knowledge
is not superior to what the agent already possessed, in
which case the algorithm allows an alternativemecha-
nism to be used for the acceptance of new knowledge
(confirmKnowledge).
This algorithm provides a basic skeleton for the
processes of acceptance, updating or rejection of
knowledge in an agent. The number and type of la-
bels used can be extended (but may involve increased
complexity of the process).
3.4 Knowledge Spreading in the Agents
Network
We have proposed this model looking to optimize the
number of messages sent through the network to com-
municate knowledge and to establish a structure that
allows some agents to perform certain recommen-
dations or make decisions based on knowledge dis-
persed over different parts of the network. So, our
model proposes the organization of a multiagent sys-
tem in at least three layers. This is in the capabili-
ties knowledge management and communication with
agents (the fact that an agent belongs to one layer or
another will depend primarily on the behaviors that it
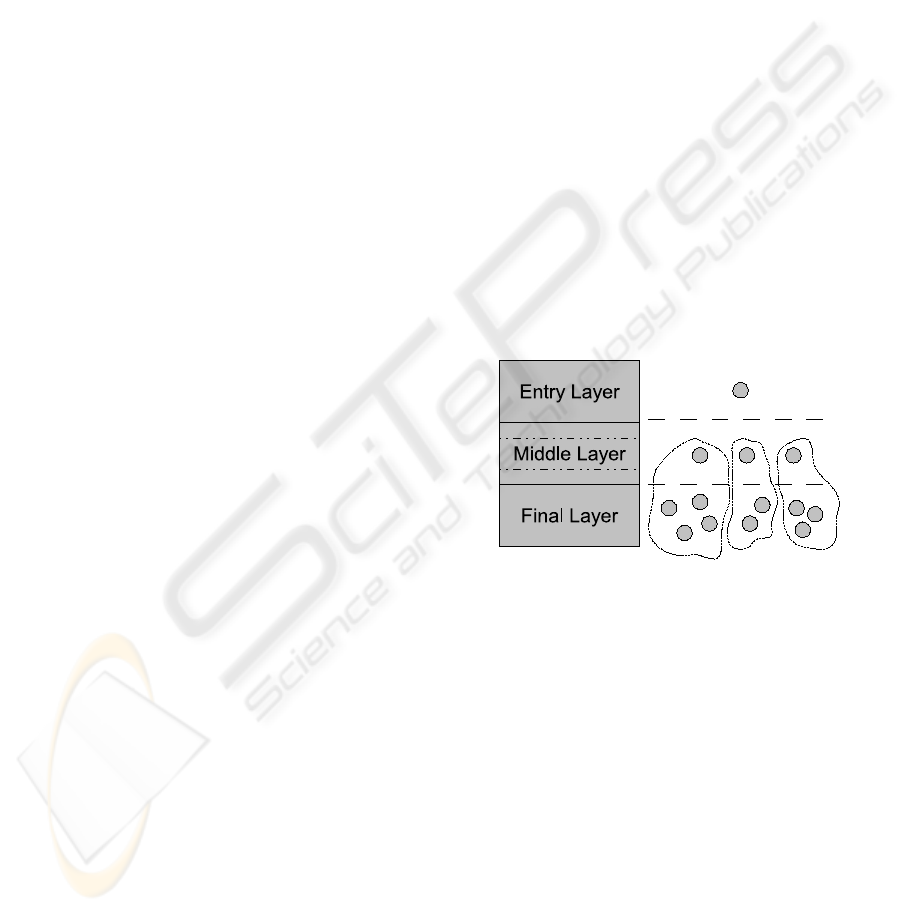
implements). figure 1 shows a diagram of the propa-
gation model.
Figure 1: Model Spreading Knowledge.
As shown in figure 1, the first layer, called the in-
put layer comprises all agents that allow for the en-
try of new knowledge in the system introduced by a
user or generate changes in the knowledge base of the
system from information sent by lower layer agents.
The number of agents that may belong to this layer
is not limited, but the simplest is formed by a sin-
gle agent (decisions and recommendationscentralized
generator). The agents of this layer only communi-
cate with the agents of intermediate layers, but allow
direct communicationwith final layer agents when the
response speed requirements are high (ocasionally).
The middle layer comprises all agents that have
the ability to generate decisions or recommendations
based on knowledge acquired from different points or
areas of the multi-agent system and coordinate the
agents belonging to lower layers. This layer can be
subdivided into many middle layers as desired, allow-
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
328
ing for scale and creating a hierarchy multiagent sys-
tem for decision or recommendation generation. The
number of agents in this layer is not limited. It is
usually a number greater than one and less than the
number of agents of the bottom layer that controls. In
the communication level, the agents of this layer are
able to coordinate (horizontal comunication) and dis-
seminate knowledge in the layers in both directions
(upper-layer and lower-layer).
The final layer comprises all terminal agents that
have the ability to obtain environmental data or act
on it. The number of agents in this layer is not lim-
ited, it is usually a number greater than the nummbers
in the rest of layers. These agents can be organized
into zones or regions of coverage controlled by a set
of agents from the upper layer. The agents of this
layer only communicate with the agents of the inter-
mediate layers, but allow direct communication with
agents from the input layer when the response time
requirements are high (ocasionally).
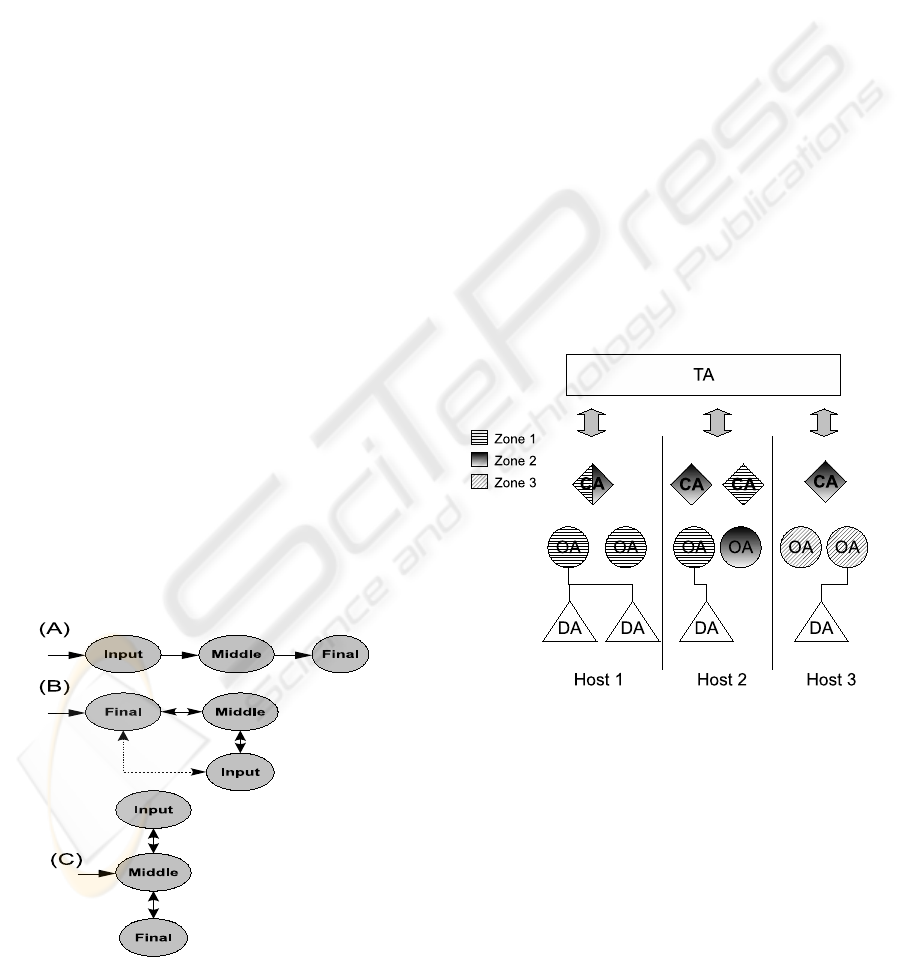
figure 2 shows the different possibilities of the
communication flow modeled, according to the
source of knowledge to be communicated. The possi-
bilities are: (A) Communicationof new knowledge by
a human user, or propagation of an action in the sys-
tem from a global knowledge of system. (B) Commu-
nication of local knowledge: In this case, knowledge
spreads from the final agents to agents of the middle
layer or input layer. In the latter case, the spread is
usually done through the middle layer, and it can be
performed directly among agents from the final layer
and the input layer (dotted lines) if response time re-
quirements are high. (C) Communication of knowl-
edge to the input layer or final layer by an agent of
the middle layer, from a partial knowledge of the sys-
tem.
Figure 2: Spreading Knowledge Flows.
4 PROPOSED ARCHITECTURE
4.1 System Overview
Based on the described model, we propose a general
system architecture composed of four types of agents:
Teleoperator Agent (TA), Coordinator Agent (CA),
Operator Agent (OA) and Device Agent (DA). This
architecture is the basis of the CARISMA project.
The number of coordinator, operator and device
agents is free (specified in the configuration of the
system), while there is only one teleoperator agent.
Communication among agents is restricted: TA can
communicate with any agent of the system (and vice
versa), while CAs and OAs will have specific infor-
mation about what other agents they can communi-
cate with. The DAs may only communicate with the
OA to which they are assigned. This configuration al-
lows us to define flexible areas, by supporting differ-
ent communication channels among agents living in
the system, which can lead to the possibility of over-
lapping in these areas.
An example of the network topology including the
three zones is shown in figure 3.
Figure 3: General architecture for CARISMA.
The network can expand or shrink according to the
number of the solar power plants and the complex-
ity of the control system. The architecture of indi-
vidual agents is based on the paradigm Belief-Desire-
Intention (Huiliang and Ying, 2005). The Teleopera-
tor Agent is the entry point into the system, providing
a user interface that allows configuration, deployment
and knowledge input to the platform. The Coordi-
nator Agents goals are to coordinate global solutions
for a state of failure or alarm detected from multiple
points in different areas. The Operator Agents are re-
sponsible for controlling the various DAs, and if they
MODEL OF KNOWLEDGE SPREADING FOR MULTI-AGENT SYSTEMS
329
detect failures or local alarms in accordance with in-
formation received from the DAs, they communicate
them to the rest of the system. The Dispositive Agents
are hybrid agents (Cognitive and Reactive), that have
the ability to alert the OA or act directly in case of
changes in the state of a device. Each DA will have a
concrete implementation intended to obtain data from
a particular sensor or perform actions on a given actu-
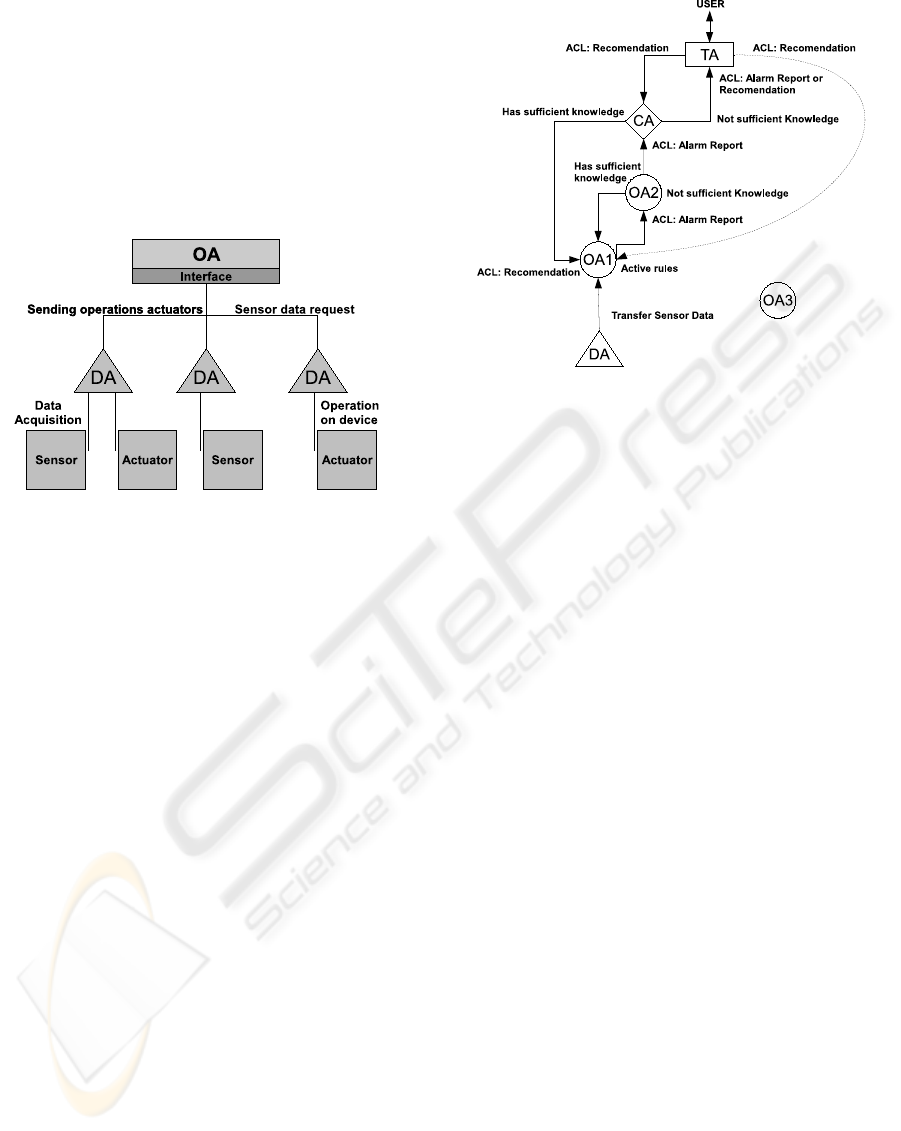
ator. An example of communication among OAs and
DAs is shown in figure 4.
Figure 4: Communication architecture for OAs and DAs.
In terms of hardware, there are no restrictions on
the number or type agents that can reside in a device
or style of devices that compose the system, but these
have to be capable of computation. Generally, the
agent node device consists of an embedded system
with support for various transmission technologies
(RF, Ethernet, Bluetooth, ...). One agent node is at-
tached various sensors and actuator devices. The sen-
sors include thermal sensors, humidity sensors, CO2
sensors, sensors for signal from solar plant appliances
and various intelligent meters such as solar irradiation
and video control (Sivianes et al., 2008). The attached
actuators include various valves, motors, and switch-
ers for heating system, ventilation, humidity control,
screen control, etc.
4.2 Application of Model
When applying the model proposed in section 3 to the
architecture discussed in section 4, an automatic con-
trol and decision support system which is very sim-
ple, reliable and scalable can be implemented. For
instance, figure 5 shows an example of spreading
knowledgein CARISMA, for the B case seen in figure
2 (generation of knowledge in the final layer). OA1,
OA2, OA3 and DA are in the final layer of the sys-
tem. CA represents the middle layer and TA of the
input layer.
OA3 does not create any communication, and it is
represented in the figure as an example of agents be-
Figure 5: Example of spreading knowledge in CARISMA.
longing to the same area but through which no knowl-
edge flows.
The flow of information starts in the DA1 agent,
which communicates the new information acquired
by a sensor to OA1. This fact produces rule activa-
tion, which implies the activation of an alarm to be
communicated to the OA2 in the area. If OA2 has the
knowledge to respond to such an alarm, it then ad-
vises the OA1, otherwise, this alarm must be commu-
nicated to the middle layer, represented by the coor-
dinator agent in its area. Then, if the CA can respond
to the alarm generated in the system, it will commu-
nicate directly to OA1 (in case of action) or to TA (in
case of recomendation). Otherwise it will report the
alarm to the next upper layer which, in this example,
is the input layer, represented by a teleoperator agent.
Finally, if the TA has sufficient knowledge, it can re-
spond directly to OA1 (if imminent action is needed)
or propagate the new information through the system,
by the reverse route. Otherwise, the TA requests in-
formation from the user to respond to the alarm.
Note that information travels in phases through-
out the system and if the necessary knowledge is not
available, then a human is requested. This allows
for the optimization of the information or knowledge
exchanged in the system, and easily increases the
knowledge base of system, with scalability.
5 CONCLUSIONS
Traditionally, control systems have had difficulties
as far as their design because they must meet high
requirements. Using our model in the design of a
multiagent-based control system, we can obtain many
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
330

benefits, such as simplicity. Based on the organization
of agents in layers exposed in our knowledge spread-
ing model, we can easily program control systems.
Other problems in control systems are scalability
and flexibility: our model does not limit the number
and types of agents and inclusion / exclusion of layers
is possible. It also allows for dynamic configurabil-
ity, so we can dynamically change parts of the system
since agents can move from one layer to another, or
new types of agents can be added. It is even possi-
ble to dinamically add new layers with certain restric-
tions, only by changing the behavior of agents. With
regard to the autonomy and intelligence, the agents of
the final layer can perform the input and output ac-
tions without the intervention of the central control-
ling computer.
Finally, our model also introduces an optimization
of communication of knowledge among agents in the
system. The layering allows for the design of a hier-
archical system, which leads to a minimization of the
exchanged messages among agents. Additionally, in
the process of acquiring knowledge by an agent, the
model introduced an algorithm that permits the con-
trol of information flows in the system, does so by
using the concepts of reliability and reputation. This
algorithm adds a mechanism to the system that allows
agents to provide solutions or recommendations in a
transparent and intelligent mode.
ACKNOWLEDGEMENTS
The work described in this paper has been funded
by the Consejer´ıa de Innovaci´on, Ciencia y Empre-
sas (Junta de Andaluc´ıa) with reference number P08-
TIC-03862 (CARISMA Project).
REFERENCES
Alessio Lomuscio, M. R. (2000). Intelligent agents vi.
agent theories architectures, and languages. In A Spec-
trum of Modes of Knowledge Sharing between Agents.
Springer, Berlin.
Colomb, R. (2007). Ontology and the Semantic Web. IOS
Press, Nieuwe Hemweg 6B, 1013 BG Amsterdam,
The Netherlands, 1nd edition.
Dongliang, L., Kanyu, Z., and Xiaojing, L. (2008). Eca
rule-based io agent framework for greenhouse control
system. In ISCID ’08. International Symposium on
Computational Intelligence and Design. IEEE Con-
ference Proceeding.
Huget, M.-P. (2003). Communication in Multiagent Sys-
tems: Agent Communication Languages and Conver-
sation Policies. Springer, New York, 1nd edition.
Huiliang, Z. and Ying, H. S. (2005). A parallel bdi agent
architecture. In IEEE/WIC/ACM International Con-
ference on Intelligent Agent Technology. IEEE Con-
ference Proceeding.
Li, H., Karray, F., Basir, O., and Song, I. (2008). A frame-
work for coordinated control of multiagent systems
and its applications. In IEEE Transactions on Systems,
Man and Cybernetics, Part A: Systems and Humans.
IEEE Conference Proceeding.
Mara Adela Grando, C. D. W. (2006). Cooperative infor-
mation agents x. In Specifying Protocols for Knowl-
edge Transfer and Action Restriction in Multiagent
Systems. Springer / Heidelberg, Berlin.
Milner, R. (1994). Communication and Concurrency. Pren-
tice Hall International (UK) Ltd., New York, 2nd edi-
tion.
Sebastian Beer, M. T. (2009). Information technologies
in environmental engineering. In MACE Multiagent
Control for Energy Infrastructures. Springer, Berlin.
Sebestyenova, J. (2005). Decision support system for mod-
elling of systems and control systems design. In In-
ternational Conference on Computational Intelligence
for Modelling, Control and Automation and Interna-
tional Conference on Intelligent Agents, Web Tech-
nologies and Internet Commerce,. IEEE Conference
Proceeding.
Sivianes, F., Romero, M., Hernandez, M., Carrasco, A.,
and Escudero, J. (2008). Automatic surveillance
in power system telecontrol applying embedded and
multi-agent system technologies. In ISIE 2008. IEEE
International Symposium on Industrial Electronics.
IEEE Conference Proceeding.
Walton, C. D. (2003). Multi-agent dialogue protocols. In
Proceedings of the Eighth International Symposium
on Artificial Intelligence and Mathematics, Fort Laud-
erdale.
Wang Junpu, Chen Hao, X. Y. L. S. (2000). An archi-
tecture of agent-based intelligent control systems. In
Proceedings of the 3rd World Congress on Intelligent
Control and Automation. IEEE Conference Proceed-
ing.
Yang, J., Yang, L., Zhao, T., and Jia, Z. (2009). Automatic
control system of water conservancy project model
based on multi agent. In WKDD 2009. Second Inter-
national Workshop on Knowledge Discovery and Data
Mining. IEEE Conference Proceeding.
Yanping Du, J. Y. (2005). Intelligent agent-based expert
system architecture for generating work plan in mar-
shalling station. In IEEE International Conference on
Granular Computing. IEEE Conference Proceeding.
MODEL OF KNOWLEDGE SPREADING FOR MULTI-AGENT SYSTEMS
331
