
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU
SECURITY MODELS
∗
Anja Fischer and Winfried K¨uhnhauser
Ilmenau University of Technology, Ilmenau, Germany
Keywords:
Security engineering, Security policies, Security models, Access control, HRU safety, Model decomposition,
Enterprise resource planning security.
Abstract:
In order to achieve a high degree of security, IT systems with sophisticated security requirements increasingly
apply security models for specifying, analyzing and implementing their security policies. While this approach
achieves considerable improvements in effectiveness and correctness of a system’s security properties, model
specification, analysis and implementation are yet quite complex and expensive.
This paper focuses on the efficient algorithmic safety analysis of HRU security models. We present the theory
and practical application of a method that decomposes a model into smaller and autonomous sub-models
that are more efficient to analyze. A recombination of the results then allows to infer safety properties of
the original model. A security model for a real-world enterprise resource planning system demonstrates the
approach.
1 INTRODUCTION
IT systems with advanced security requirements in-
creasingly apply problem-specific security policies
for describing, analyzing and implementing secu-
rity properties (Bryce et al., 1997; Halfmann and
K¨uhnhauser, 1999; Loscocco and Smalley, 2001; Ef-
stathopoulos and Kohler, 2008). In order to precisely
describe security policies, formal security models
such as (Harrison et al., 1976; Goguen and Meseguer,
1982; Brewer and Nash, 1989; Sandhu et al., 1996)
are applied, allowing for formal analyses of secu-
rity properties and serving as specifications from
which policy implementations are generated (Vimer-
cati et al., 2005).
While security policies and their formal models
achieve considerable improvements in effectiveness
and correctness of a system’s security properties, the
costs of this approach often are rather forbidding. The
analysis of security models is often pestered by com-
putational complexity, making it difficult to devise al-
gorithms for automated analysis tools.
A fundamental motivation for access control se-
curity models is to study the proliferation of access
rights. This problem was formalized in HRU access
control models in order to find proliferation bound-
aries and to prove that, for a given security model,
∗
This work is partially supported by Carl-Zeiss-Stiftung.
these boundaries will never be crossed – a security
property known as HRU safety.
Unfortunately, HRU safety turned out to be unde-
cidable for models written in the general HRU calcu-
lus, making it difficult to devise algorithms for auto-
mated safety analysis tools. As a consequence, sev-
eral safety-decidable fragments of the HRU calcu-
lus emerged (Harrison and Ruzzo, 1978; Lipton and
Snyder, 1978; Ammann and Sandhu, 1991; Sandhu,
1992) that bought safety decidability by limiting the
expressivepower of the calculus. Unfortunately,these
fragments now result in another drawback: they often
show severe limitations in their power to model the
complex policies of larger real-world systems. Con-
sequently, the chances for automated safety analyses
of real-world security models are quite low.
In this paper, we propose a method for analyz-
ing the safety properties of unrestricted HRU security
models. Although the safety problem is still gener-
ally pestered by undecidability, the method achieves
results in many practical cases. The core of the idea
is to decompose a model into smaller sub-models,
then analyze these sub-models individually and re-
combine the results – an approach also applied in the
analysis of complex automata (Krohn and Rhodes,
1965). The rationale behind this approach is twofold.
Firstly, smaller sub-models can be analyzed more ef-
ficiently by heuristic safety analysis algorithms with
49
Fischer A. and Kühnhauser W. (2010).
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU SECURITY MODELS.
In Proceedings of the International Conference on Security and Cryptography, pages 49-58
DOI: 10.5220/0002986600490058
Copyright
c
SciTePress

polynomial or exponential runtimes. Secondly, be-
cause sub-models can be analyzed independently the
parallelism of multi-core processor architectures can
be exploited.
The contributions of this paper are a formal defini-
tion of the decomposition method and a formal proof
of its correctness. Throughout the paper, excerpts
from a real-world enterprise resource planning system
security policy illustrate the details.
2 RELATED WORK
Fundamental to this paper is the work of Harrison et
al. (Harrison et al., 1975; Harrison et al., 1976). The
authors present a calculus to formalize access con-
trol policies, consisting of access control matrices and
state machines. The primary purpose of security mod-
els written in the HRU calculus is to obtain statements
about the proliferation of access rights, drawn from
a reachability analysis of the model’s state machine.
As was to be expected, the HRU safety problem – the
property whether a given right may appear in some
future automaton state – turned out to be undecid-
able for general HRU models, and work focused on
finding fragments of the HRU calculus with decid-
able safety properties. It was proved that the safety
problem is decidable, e.g. for mono-operational (Har-
rison et al., 1976) and mono-conditional (Harrison
and Ruzzo, 1978) HRU models. Lipton and Snyder
(Lipton and Snyder, 1978) introduced static restric-
tions on subject creation. Sandhu proposed the typed
access matrix model (TAM) (Sandhu, 1992) that aug-
mented the HRU model by a type system.
Kleiner and Newcob (Kleiner and Newcomb,
2006; Kleiner and Newcomb, 2007) present an access
control model that improves the ability to deal with
the absence of permissions but can still simulate any
HRU model. The authors also present different and
more rigorous terms of safety properties showing that
they can be decided. In (Kleiner and Newcomb, 2007)
the safety access temporal logic is introduced, which
is able to express a variety of safety properties over
access control models and is interpreted over finite
runs of the access control system. The model check-
ing problem for the entire logic is undecidable; again,
a fragment of the logic was identified for which the
problem is decidable. The HRU safety problem can
be reduced to this fragment in some cases.
Li et al. (Li et al., 2005) argue that delegation
of rights is a useful feature of access control systems
while it makes safety and security analyses more im-
portant. The authors present a trust management lan-
guage in the RT family (role-based trust-management
languages) which can be encoded in the HRU model
but is more application-oriented. The authors define
the goals of a security analysis in more general terms
such as simple safety, simple availability or mutual
exclusion and show that they can be decided.
Our approach to HRU safety analysis differs from
these approaches in a fundamental way. Instead of in-
troducing model restrictions our safety analysis tech-
nique works on the original, general HRU calculus
(and, of course, its derivatives) and aims at a practical
method for dealing with the problem’s computational
complexity. We tackle the problem by decomposing a
model into smaller sub-models, analyzing the safety
properties of the sub-models and providing a tech-
nique to carry the analysis results back to the origi-
nal model. The basic ideas of this approach originate
from the decomposition of automata and go back to
(Krohn and Rhodes, 1965).
3 APPLICATION SCENARIO
The challenges addressed in this paper are motivated
by the complexity of the security requirements in
real-world application scenarios. In this section, we
dedicate some space to introduce a security-sensitive,
real-world application system to motivate a set of
application-specific security requirements. Based on
these requirements we proceed with composing an in-
formal security policy that then motivates the secu-
rity model in Section 4. The application scenario,
the security policy and its model will then provide a
background, an example and a source of arguments
throughout the rest of the paper.
We do this in some detail, because the subsequent
model decomposition technique in Section 5 injects
human application knowledge into the safety analysis
algorithms as one means to reduce their runtime, and
thus this knowledge should be available to the reader.
3.1 Application
The application scenario is a distributed enterprise
collaboration system providing services that effi-
ciently extend business processes of cooperating or-
ganizations across company boundaries. We espe-
cially focus on standard business systems (such as en-
terprise resource planning (ERP) systems) supporting
logistic business processes for cooperative order pro-
cessing.
One important task in this scenario is the process
of availability checking (available-to-promise, ATP)
which is a typical business process that crosses sev-
eral company boundaries whenever sub-contractors
SECRYPT 2010 - International Conference on Security and Cryptography
50

Figure 1: Application scenario.
are involved. When customers place orders with man-
ufacturers that use ERP systems, these ERP systems
call ATP services of further suppliers for checking
the availability of outside supplied original equipment
manufacturer (OEM) parts (Fig. 1). ATP services of-
ten are implemented as web services, and thus a man-
ufacturer generally has to call several web services of
different OEM suppliers for processing a single order.
In our example, this service (among other web ser-
vices) is provided by a service provider on a shared
communication platform. Once the ATP web service
has received a manufacturer’s availability request, the
ATP service forwards the request to all the manufac-
turer’s OEM part suppliers, analyses the responses
and sends the results back to the ERP system. The
ERP system evaluates the suppliers’ responses which
then results in an offer for the customer.
3.2 Security Requirements
In cross-company business processes, common secu-
rity properties such as confidentiality, integrity, avail-
ability, authenticity, and non-repudiation are both
self-evident as well as essential. This section dis-
cusses two application-specific key requirements.
One key requirement in this scenario is the sep-
aration of duty between administrators and regular
users. This means, regular users may only obtain reg-
ular (operative) permissions and administrators may
solely possess administrator permissions.
Delegation of rights — temporarily entrusting a
user’s access rights to another user — is a common
feature of business applications. Due to the collabo-
ration system’s properties of providing services to in-
dependent companies, the second key requirement is
to restrict delegationof rights to company boundaries.
Consequently, rights may only be delegated between
users acting on behalf of the same company.
3.3 Authorization Policy
Any security policy is a set of rules designed to
meet the security goals of an IT system (Common3.1,
2009). While security policies in general include
rules about authentication or communication, the dis-
cussion in this paper focuses on the core part of a
policy, the authorization rules. Especially, this sub-
section discusses an informal authorization policy for
the example scenario outlined in the previous section.
The next section will then rewrite this policy as a for-
mal HRU security model.
The authorization policy is an immanent part of
the service provider’ssecurity policy and, as such, it is
integrated into the service provider’s shared commu-
nication platform. It contains access control rules for
all references to web services
2
made by users. Thus,
whenever a user tries to call a web service, the au-
thorization policy’s rules are applied to grant or deny
access.
In order to enforce separation of duty, the autho-
rization policy differentiates between regular and ad-
ministrative rights; a user’s right to obtain permis-
sions results from his identity. Among others, the au-
thorization policy contains rights to execute a web ser-
vice and to delegate and revoke this right. The rights
delegate and revoke realize a user-based grant dele-
gation (Crampton and Khambhammettu, 2008) sup-
porting a one-level delegation hierarchy. Note that the
application scenario may also support a n-level dele-
gation hierarchy; however, due to demonstrating pur-
poses of the decomposition algorithm we reduce the
application scenario to the basics.
In order to implement rights delegation restricted
to company boundaries, users from different compa-
nies must be distinguished by adopting the concept of
security domains of non-interference security models
(Goguen and Meseguer, 1982). Hence, to define del-
egation boundaries, each user is assigned a security
domain. Users of a company belong to the same se-
curity domain, and users belonging to different com-
panies belong to different security domains.
In summary, the authorization policy contains –
among others – the following rules:
1. Every user is assigned one of two mutually exclu-
sive user types: regular user or administrator.
2. The user types’ rights sets are disjoint. Regular
rights are execute, delegate, and revoke. Admin-
istrative rights are rights to manage the authoriza-
tion policy.
3. In order to delegate a right, delegator and delega-
tee must belong to identical security domains.
4. Delegation of rights is additive — both delegator
and delegatee possess the delegated rights.
2
Note that there are different object types, e.g. web ser-
vices, administration operations, and rights. Due to con-
ciseness we only consider web services in the following.
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU SECURITY MODELS
51

4 SECURITY MODEL
While security policies generally are phrased in natu-
ral language, systems with advanced security require-
ments increasingly apply security models for formal
description and rigorous analysis of their security
properties. Most of the existing models address spe-
cific challenges: to prove the mapping from an ab-
stract design level (such as information flow graphs)
to a system oriented level (such as access control
mechanisms (Bell and LaPadula, 1973)), to prove in-
terference rules for security domains (Goguen and
Meseguer, 1982), or to precisely define role contain-
ment (Sandhu et al., 1996) or information flow (Efs-
tathopoulos and Kohler, 2008).
In large real-world applications, a major challenge
is controlling the proliferation of rights. Particularly
in distributed systems shared by independent organi-
zations (such as the ERP example), questions such as
”Is it possible that users belonging to some organiza-
tion A may, at some point in the future, get access to
internal information of users from organization B?”
arise. The analysis of such dynamic right prolifera-
tion is the primary objective of HRU security models
and is known as the HRU safety problem (Harrison
et al., 1975; Harrison et al., 1976).
In order to model dynamic behavior of access con-
trol systems, any HRU security model is a state ma-
chine defined by a tuple (Q, Σ,δ,q
0
) with a state set
Q, an input alphabet Σ, a state transition function δ
and an initial state q
0
. Any state q ∈ Q is a snapshot
of the system’s access control matrix (ACM) and is
modeled by a triple (S,O,m) where S is a set of sub-
jects, O is a set of objects, and m : S× O → 2
R
is an
access control matrix where the cells contain subsets
of a finite right set R.
Security properties can now be analyzed by ob-
serving state transitions; in particular, statements
about right proliferation can be made by state reach-
ability analysis. Safety analysis in HRU models fo-
cuses on a fundamental family of questions: Given
some state (an ACM), is it possible that a specific sub-
ject ever obtains a specific permission with respect to
a specific object? Or, in other words, given a state q, is
it possible that in some future state q
′
= δ
∗
(q,a) a spe-
cific right r leaks into a matrix cell? If this may hap-
pen, such states are not considered safe with respect to
r. Precisely, given an HRU security model and a right
r, a state q is called safe wrt. r iff∀s ∈ S,o∈ O,a ∈ Σ
∗
:
r /∈ m(s,o) ⇒ r /∈ m
′
(s,o) withq
′
= δ
∗
(q,a)
(Harrison et al., 1975; Harrison et al., 1976).
Following the policy outlined in Section 3.3, we
now will look into the corresponding HRU model; its
safety properties will afterwards be analyzed in Sec-
tion 5.
In our ATP scenario, the set of subjects S = {s
i
|i ∈
N} represents the application’s users, whereas the set
of objects O = {o
j
| j ∈ N} describes the methods of
the web services. M = {m|m : S × O → 2
R
} repre-
sents the set of access control matrices. Each matrix
m ∈ M specifies the rights each user (subject) has with
respect to each web service method (object).
The set R models rights that subjects may own on
objects. In the ERP scenario, users may own rights
to execute web service methods (executeWSMethod
r
),
to delegate and revoke rights to execute methods
(delegateExecuteRight
r
, revokeExecuteRight
r
), or to
perform system administration operations such as
user, or service management.
Model dynamics are defined by the transition
function δ : Q × Σ → Q that reflects the rules which
prescribe the authorization for making incremental
changes to the protection state in the ACM (thus δ is
often called the model’s authorization scheme). Σ is
the finite set of inputs coveringall application-specific
operations that result in a modification of the model
state. In real-world applications, operations in Σ typi-
cally (but not exclusively) are used by security admin-
istrators and eventually involve users, web services,
and other parameters. For example the operation cre-
ateUser called in some state q = (S
q
,O
q
,m
q
) adds a
new subject to S
q
; here, parameters are the caller (an
administrator) and the subject to be created. Precisely,
the input set Σ is a tuple consisting of
• the set of operations that affect the model state
(such as createUser, delegateExecuteRight)
• the parameters of these operations, consisting of
subjects and objects.
Fig. 2 gives a small example for the definition
of a model state transition caused by the operation
delegateExecuteRight.
δ(q,(delegateExecuteRight,s
s
,s
d
,o)) ::=
if delegateExecuteRight
r
∈ m(s
s
,o)
and executeWSMethod
r
∈ m(s
s
,o)
and dom(s
s
) ∈ m(s
d
,o
dom
)
then
enter executeWSMethod
r
into m(s
d
,o)
end if.
Figure 2: Authorization scheme for delegateExecuteRight.
delegateExecuteRight
r
grants delegator s
s
per-
mission to delegate the right executeWSMethod
r
to
delegatee s
d
. The rationale is that if s
s
owns
executeWSMethod
r
and is a member of the same se-
curity domain as s
d
, then the state machine moves into
SECRYPT 2010 - International Conference on Security and Cryptography
52

a new state in which the access matrix contains the
right executeWSMethod
r
for the subject s
d
with re-
spect to the web service method o.
With respect to the pure HRU calculus, we meet
with an unfamiliar concept in Fig. 2: we used a func-
tion dom where an access right should be expected.
Although a little off from the core intentions of this
section – to sketch an HRU model for an ATP system
– we nevertheless want to comment on the validity of
doing so.
While from a theoretical point of view the HRU
calculus has sufficient expressive power to model any
computable policy, from a modeler’s point of view the
rules of a policy do not always map elegantly to the
calculus’ abstractions. As an example, while the se-
curity policy outlined in Section 3.3 uses security do-
mains in order to isolate different organizations, HRU
model states consist of simple ACMs only. We deal
with this problem in the following way.
We describe the security domains defined on the
policy level by a finite set D, and the association of
any user to a security domain by a function dom :
S → D. Because any function can also be written
as a mapping table, we now can express dom using
the abstractions of the HRU calculus by adding a new
column for a virtual object o
dom
to the access con-
trol matrix, in which each domain is represented by
a corresponding “right”. Thus by extending the set R
to R ∪ D and the set O to O∪ {o
dom
}, a test whether
two users s
s
and s
d
are members of the same domain
maps to dom(s
s
) ∈ m(s
d
,o
dom
), and the use of the
dom-function in the condition part of state transition
definition becomes legitimate.
Back to modeling the security policy from Sec-
tion 3.3. Two issues remain to complete the model:
modeling the fact that a subject is a security admin-
istrator, and the definition of the initial model state.
The requirement from Section 3.2 to differentiate be-
tween regular users and administrators is met by mod-
eling an authority compartment: admin. We start the
model in the initial state q
0
= (S
0
,O
0
,m
0
) with one
administrator, resulting in an initial set of subjects
S
0
= {administrator}. Using the same trick as when
modeling the dom function, the association of sub-
jects to the authority compartment is modeled by a
virtual right admin
r
which manifests in an extra ma-
trix column for a virtual object o
comp
. Thus the initial
object set is O
0
= {o
comp
}. The initial matrix m
0
con-
sists of a single row for administrator, and a single
column for the compartment association represented
by the virtual object o
comp
(Fig. 3), and the model is
complete.
Concluding, this section has sketched major com-
ponents of a security model for the policy outlined
Figure 3: Initial access matrix m
0
.
in Section 3.3 by applying the general HRU calculus,
syntactically enriched by calculus-consistent compo-
nents for modeling administrative users and security
domains. The complete model including the defi-
nition of all model sets, the complete authorization
scheme encompassing about ten administrative opera-
tions, and the definition of the initial model state con-
sists of approximately 140 lines in the HRU calculus
and took about 16 hours to set up. As a result, we
now have a solid foundation for a formal analysis of
the security properties and especially the safety prop-
erties of our policy.
5 SAFETY ANALYSIS
In this section, we propose a model decomposition
method for unrestricted HRU security models that, al-
though still generally pestered by safety undecidabil-
ity, allows for safety analysis in many practical cases.
The core of the method is to decompose a model into
smaller sub-models, then analyze these sub-models
individually and recombine the results.
5.1 Model Decomposition
Model decomposition divides the state space of an
HRU model (the ACM) into two or more smaller and
disjoint slices. Each slice differs from the original
ACM in that either its subject set, its object set or both
are smaller. By maintaining the authorization scheme
δ, the input set Σ and (accordingly restricted) the ini-
tial state q
0
, two or more sub-models with reduced
state spaces emerge.
Just decomposing a model into smaller slices does
of course not reduce the inherent complexity of solv-
ing the safety problem. The underlying idea is a dif-
ferent one.
Firstly, because the safety problem is generally
undecidable, we have to resort to heuristics-based
safety analysis algorithms with runtime boundaries
typically depending polynomially or exponentially on
the size of the model’s state space. As an exam-
ple, for a state space size s and an analysis algorithm
running in O(s
2
), a state space reduction by a factor
of four (model decomposition into four equally-sized
sub-models), the runtime of the algorithm is bounded
by 4(s/4)
2
= 1/4 s
2
, which for manageable values of
s makes a huge difference to s
2
. Because sub-models
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU SECURITY MODELS
53
are independent and thus can be analyzed simulta-
neously on multi-core/multiprocessor/grid architec-
tures, the runtime actually is bounded by 1/16s
2
.
Secondly, the success of heuristic safety analy-
sis algorithms largely depends on the quality of the
heuristics, and here we take the view that the use
of human problem knowledge is a quality source for
guiding heuristics-based algorithms. The challenge
here is finding a problem-specific model decomposi-
tion that minimizes the state spaces of the sub-models
without violating model semantics. On the one hand,
a necessary condition for any valid state decomposi-
tion is that the resulting slices still are closed with re-
spect to the model’s authorization scheme δ. On the
other hand, a proper heuristics will strive to maximize
the number of resulting slices.
Before precisely defining what is meant by closed
with respect to δ, let us first briefly look at our exam-
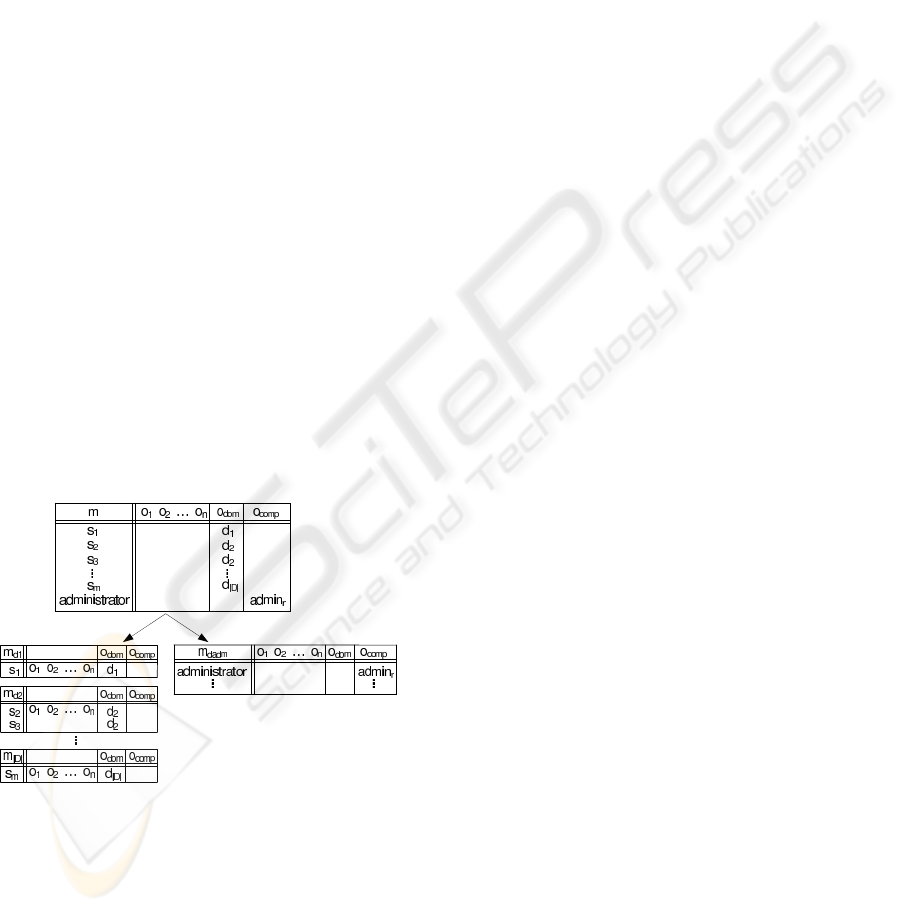
ple from Section 4. For cross-company scenarios, an
obvious decomposition heuristics exploits the natu-
ral security domains defined by the company perime-
ters: each sub-model then covers the state of exactly
one individual domain. With D denoting the set of
domains, this example results in |D| self-contained
sub-models with |D| pairwise disjoint subject sets
S
d
1
...S
d
|D|
, a common object set O, and |D| matrix
slices m
d
i
that contain only the rows for their individ-
ual subject sets S
d
i
. Additionally, prominent subjects
not directly associated to any security domain (such
as security administrators) are collected in a separate
slice m
d
adm
(Fig. 4).
Figure 4: State space decomposition.
Note that in each sub-model only the access matri-
ces differ. The right sets, the rights in the matrix cells
and the authorization schemes of the sub-models ex-
actly match their counterparts in the original model.
Now let us consider the properties of a proper
model decomposition. Given an HRU model
(Q,Σ, δ,q
0
), any decomposition heuristics d decom-
poses the state space Q = 2
S
× 2
O
× M into two or
more state spaces Q
i
of sub-models (Q
i
,Σ, δ
i
,q
0
i
),
where
- Q
i
= 2
S
i
× 2
O
i
× M
i
,S
i
⊆ S, O
i
⊆ O,M
i
= {m|m :
S
i
× O
i
→ 2
R
}
- δ
i
(q|Q
i
,a) = δ(q,a)|Q
i
for q ∈ Q and a ∈ Σ
- q
0
i
= q
0
|Q
i
.
The expression ”q|Q
i
” denotes the restriction of a
state q ∈ Q to a smaller state in the state space Q
i
of
some sub-model. Precisely, q|Q
i
= (S|S
i
,O|O
i
,m|M
i
)
removes those parts of a state q that are not within
the sub-model’s definition domain. In the state
space decomposition in Fig. 4, a state q of the full
model is ({s
1
...administrator},{o
1
...o
comp
},m), and
q|Q
d
adm
= ({administrator} , {o
1
...o
comp
},m
d
adm
).
Because our goal is to infer safety properties of the
original model from individual safety properties of
its sub-models, any model decomposition must have
distinct properties: each individual sub-model must
be an autonomous HRU model, and the set of sub-
models collectively must exhibit exactly the same be-
havior as the original model. We will look into sub-
model autonomy and behavior equivalence in the next
subsections.
5.1.1 Sub-model Autonomy
In order to be an autonomous HRU model, each sub-
model’s state space Q
i
must be closed with respect to
its δ
i
. Closedness means that, for each state q of the
original model, if q is restricted to the state space Q
i
of the sub-model, each state reachable from q in the
original model by applying δ still is in Q
i
:
Def. State Closedness. In any HRU model
(Q,Σ, δ,q
0
), a subset Q
i
⊂ Q is called state-
closed iff ∀q ∈ Q, a ∈ Σ : q ∈ Q
i
⇒ δ(q,a) ∈ Q
i
.
5.1.2 Sub-model Isomorphism
In order to infer safety properties of the original
model from the set of sub-models, any model decom-
position must preserve the structure as well as the be-
havior of the original model. In other words, a model
decomposition d must be an isomorphism.
To this end, for any model decomposition into n
sub-models d must induce a complete decomposition
of the state space Q such that
S
n
i=1
Q
i
= Q (denoting
that
S
n
i=1
(S
i
× O
i
) = (S × O)). Any good decompo-
sition will also avoid redundancies in the sub-models
and induce mutually disjoint state spaces, ∀i, j,i 6= j :
Q
i
∩ Q
j
=
/
0 (denoting that (S
i
× O
i
) ∩ (S
j
× O
j
) =
/
0).
These properties are summarized in the following
definition.
Def. Model/Sub-model Isomorphism. Given
an HRU model (Q,Σ,δ,q
0
), a function
SECRYPT 2010 - International Conference on Security and Cryptography
54

d : d(Q) 7→ (Q
1
...Q
n
) is called a decomposi-
tion function iff
(a) each Q
i
is state-closed
(b)
S
n
i=1
Q
i
= Q (completeness)
(c) ∀i, j,i 6= j : Q
i
∩ Q
j
=
/
0 (mutual disjointness)
(d) ∀q ∈ Q,a ∈ Σ : δ
i
(q|Q
i
,a) = δ(q, a)|Q
i
with Q
i
as defined above.
Intuitively, sub-models are autonomous HRU
models, sharing the authorization scheme with their
origin but having smaller state spaces. The n sub-
models generated by d establish a set of n smaller
HRU models with state spaces Q
1
...Q
n
, the sub-
model set collectively implementing a virtual state
transition function δ : Q
1
× ... × Q
n
× Σ → (Q
1
...Q
n
),
δ(q
1
,..., q
n
,a) 7→ (δ
1
(q
1
,a),..., δ
n
(q
n
,a)) with δ
i
as
defined in (d). The properties (b) and (c) of the
state space decomposition function d now imply that
there exists a state decomposition function d : Q →
Q
1
× ... × Q
n
, d(q) 7→ (q|Q
1
,..., q|Q
n
) that selects the
partial states q
i
for each sub-model (Fig 5).
Because of (a), (b) and (c), d is a homomorphism
from Q to Q
1
...Q
n
, and d(δ(q,a)) = δ(d(q), a) holds
because of (d) (Fig. 6). Because of (b) and (c), d
is also bijective, and the inverse mapping d
−1
: Q
1
×
... × Q
n
→ Q exists which recombines the result of
the sub-model’s state transitions by d
−1
(q
1
...q
n
) 7→
S
n
i=i
q
i
. Thus d is also an isomorphism, and δ(q,a) =
d
−1
(δ(d(q), a)) holds, which finally shows that the
original model and the set of its sub-models generated
by a proper decomposition function d are isomorphic.
Figure 5: State decomposition function d.
Figure 6: State decomposition isomorphism.
5.1.3 Discussion
The definition of state closedness opens a wide variety
of decomposition patterns. In fact, finding a decom-
position heuristics that matches the closedness prop-
erties is exactly the intellectual challenge that tack-
les the problem of computational complexity inherent
to fully automated safety analysis. In the past, vari-
ous ACM decompositions such as our own example
(Fig. 4), or decompositions into single matrix rows or
columns have been successfully applied in different
areas. For example, the single row/column decompo-
sitions resulted in efficient implementations of ACMs
by ACLs respectively capability lists.
We already sketched the results of applying the
decomposition method to the security model of our
application scenario in Fig. 4. Assuming that the se-
curity model consists of |D| security domains and ap-
plying a decomposition heuristics based on these do-
mains, we obtain |D|+1 sub-models where each sub-
model is an autonomous HRU model, and each but
one model satisfies the closedness condition.
The rogue sub-model is unique in that it contains
only users belonging to the authority compartment
admin
r
but not to any security domain. At this point,
readers already might have observed that this sub-
model does not satisfy sub-model closedness, because
administrative users are able to affect any other sub-
model, e.g. by granting rights to subjects. However,
these are desirable characteristics since, being respon-
sible for policy management, administrative users are
trustworthy by definition. Furthermore, analyzing a
model’s safety properties in consideration of admin-
istrative users is a trivial problem because they are
usually able to proliferate any right in any state and
thus are unspectacular with respect to safety analy-
sis. Their collection in a single, unsafe sub-model
purges administrative contaminations from all other
sub-models and allows for a pure safety analysis re-
stricted to regular users.
5.2 From Sub-model Safety to Model
Safety
It remains to show that safety properties of an HRU
model are maintained by a decomposition. Before we
discuss a corresponding theorem, we set up a lemma
about the equivalence of δ and the δ
i
’s of the sub-
models.
Lemma (δ
∗
-equivalence). Let δ
∗
: Q × Σ
∗
→ Q be
the extension of δ to a sequence of inputs from
Σ
∗
. Then, given an HRU model (Q, Σ,δ,q
0
) and
a decomposition function d, ∀a ∈ Σ
∗
, q ∈ Q a sub-
model (Q
i
,Σ, δ
i
,q
0
i
) exists such that δ
∗
(q,a)|Q
i
=
δ
∗
i
(q|Q
i
,a).
This follows directly from the state closedness of
the Q
i
’s and the definition of the δ
i
’s, because each
δ
i
sees exactly the same local state as its original and
thus performs the same state transitions.
Theorem (Sub-model Safety Equivalence). Given
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU SECURITY MODELS
55

an HRU model (Q,Σ,δ, q
0
) and a decomposition
function d. Then, ∀q ∈ Q,r ∈ R :
q not safe wrt. r ⇔ ∃ sub-model(Q
i
,Σ, δ
i
,q
0
i
) : q|Q
i
not safe wrt. r.
Proof.
”⇒”:
q = (S,O,m) not safe wrt. r
⇒ ∃ s ∈ S,o ∈ O,a ∈ Σ
∗
,q
′
∈ Q,
q
′
= δ
∗
(q,a) = (S
′
,O
′
,m
′
) :
r /∈ m(s,o) ∧ r ∈ m
′
(s,o).
Because d is complete and disjoint, there exists
exactly one sub-model (Q
i
,Σ, δ
i
,q
0
i
) containing
the critical matrix cell: m(s,o) = m
i
(s,o) where
s ∈ S
i
,o ∈ O
i
.
Because of the δ
∗
-equivalence lemma,
(S
′
,O
′
,m
′
)|Q
i
= q
′
|Q
i
= δ
∗
(q,a)|Q
i
= δ
∗
i
(q|Q
i
,a) = q
i
′
= (S
i
′
,O
i
′
,m
i
′
),
⇒ m
′
|M
i
= m
i
′
.
Because s ∈ S
i
and o ∈ O
i
⇒ m(s,o) = m
i
(s,o) and m
′
(s,o) = m
i
′
(s,o).
Because r /∈ m
i
(s,o) ∧ r ∈ m
i
′
(s,o), (Q
i
,Σ, δ
i
,q
0
i
)
is a sub-model where q
i
= q|Q
i
is not safe wrt. r.
”⇐”:
∃ sub-model (Q
i
,Σ, δ
i
,q
0
i
) : q|Q
i
not safe wrt. r;
then, with q
i
= q|Q
i
= (S
i
,O
i
,m
i
)
⇒ ∃s ∈ S
i
,o ∈ O
i
,a ∈ Σ
∗
:
q
i
′
= δ
∗
i
(q
i
,a) = (S
i
′
,O
i
′
,m
i
′
) :
r /∈ m
i
(s,o) ∧ r ∈ m
i
′
(s,o).
Because of the δ
∗
-equivalence lemma,
∀q ∈ Q,q
i
∈ Q
i
,q
i
= q|Q
i
:
(S
i
′
,O
i
′
,m
i
′
)
= q
i
′
= δ
∗
i
(q
i
,a) = δ
∗
(q,a)|Q
i
= q
′
|Q
i
= (S
′
|S
i
,O
′
|O
i
,m
′
|m
i
)
⇒ ∀s ∈ S
i
,o ∈ O
i
: m
i
′
(s,o) = m
′
(s,o).
Because d is a decomposition function, ∀s ∈ S
i
,
o ∈ O
i
: m
i
(s,o) = m(s, o) (property (d)).
Because r /∈ m
i
(s,o) = m(s, o) ∧ r ∈ m
i
′
(s,o) =
m
′
(s,o), q is not safe wrt. r.
We thus have found precise rules for decompos-
ing any HRU security model into smaller and au-
tonomous sub-models. Because the sub-models are
smaller, they generally are easier to analyze and cut
down the runtimes of heuristic safety analysis algo-
rithms. Because the sub-models are autonomous, they
can be analyzed concurrently.
The properties of the decomposition function
guarantee that the original model and its sub-models
are structurally equivalent, and that the results of sub-
model safety analysis also hold for the original model:
on the one hand, for each state that is not safe in some
sub-model, a state in the original model exists that is
not safe, too; on the other hand, for each state that is
not safe in the original model, a state in a sub-model
exists that is also not safe.
5.3 Applicability of the Decomposition
Method
In order to apply the proposed decomposition method,
systems need to have a certain property — a system’s
HRU model must be decomposable into autonomous
sub-models (Section 5.1.2). Just as our application
scenario incorporates the required system property
due to its security policy rules (separation of duty and
restricting right delegations to security domains), nu-
merous state-of-the-art systems also implement this
property by design. This section picks two prominent
examples from the business and military domain and
discusses the applicability of the proposed decompo-
sition method.
In standard business systems, the required sys-
tem property has been implemented for more than
a decade by multiclient ability — a concept applied
by a variety of standard business software, e.g. by
SAP’s business solutions with over 100.000 instal-
lations worldwide, e.g. a business software installa-
tion can be used by two or more companies in par-
allel. Multiclient ability allows to map one inde-
pendent organizational entity to one client on a soft-
ware installation, without having to install and main-
tain a separate system for each organizational en-
tity (SAP AG, 2009). Consequently, if a system sup-
ports multiple clients, the client’s data – which usu-
ally is business-critical – has to be strictly isolated
from any other client. This key requirement is usu-
ally dealt with by a sophisticated authorization policy
— the clients’ users only have rights on the clients’
objects and do not own any rights on objects of the
other clients; only users with special privileges (ad-
ministrators) own rights on all objects.
Figure 7: Business software with two clients.
Figure 7 shows the ACM of a multiclient sys-
tem with two clients. The ACM contains client-
SECRYPT 2010 - International Conference on Security and Cryptography
56
dependent objects (business data) for each client and
client-independent objects (customizing data) which
are system-dependent and shared by all clients. The
client’s users own the rights to read, write or execute
the client’s data; the system data can only be read or
executed by a client’s user. Consequently, this de-
sign choice is optimal for the proposed decomposition
method since an appropriate decomposition heuristics
is directly inferred from the application. As a result, a
system hosting n clients can be decomposed in n + 1
slices (rows), in n + 1 slices (columns) whereas the
client’s users and the privileged users are collected in
separate slices (see Fig.4), or in (n+1)×(n+1) slices
(checker board pattern).
Military systems commonly enforce multilevel se-
curity (MLS) policies where objects are classified into
hierarchical security levels and subjects are granted
clearances meaning that a subject is granted a clear-
ance, only if the subject is considered trustworthy
for objects up to this particular security level. The
structure of military security levels is commonly de-
scribed by the lattice model for defining information
flow (Denning, 1976). In order to implement these
application-oriented MLS policies, system-oriented
models based on ACMs have been extended to in-
clude security levels, clearances, and classification
rules, e.g. the Bell and LaPadula (BLP) model (Bell
and LaPadula, 1973) which combines lattices and
state machines by defining precise rules (Simple Se-
curity Rule, *-property) to control whether or not an
ACM is a correct implementation of a lattice. The
state transition function thus ensures that the ACM’s
correctness remains. As such MLS policies modeled
with the BLP model are a special case of HRU secu-
rity models (Pittelli, 1988) which abide to strict MLS
policy rules. Both the classification of subjects and
objects to a single security level/clearance as well as
the strict MLS policy rules set the course for the pro-
posed decomposition method.
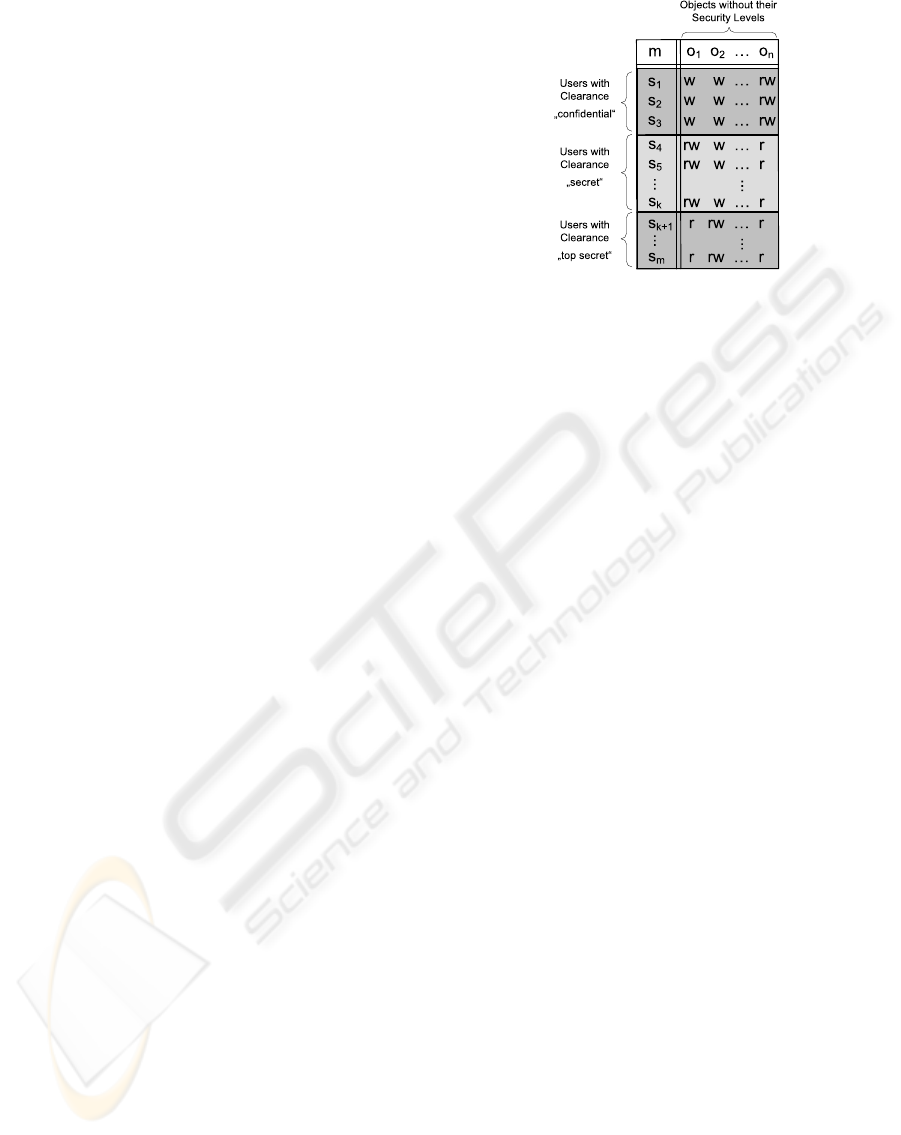
Assuming l is an MLS policy’s number of secu-
rity levels assigned to its objects and c ≤ l is the
number of clearances assigned to its subjects. The
system’s model can then be decomposed in l slices
(columns) where all sub-models have the same sub-
ject set but mutually disjoint object sets, or in c slices
(rows) where all sub-models have the same object set
but mutually disjoint subject sets (Fig. 8 with c = 3).
Hence, the subjects’ clearances respectively the ob-
jects’ security levels are then disregarded and do not
contribute to the decomposition.
In general, MLS policies allow for reclassify-
ing subjects and objects. However, depending on the
applied decomposition heuristics reclassifying a sub-
ject/object may have an impact on the sub-models’
Figure 8: Decomposition according to subject clearances.
subject or object sets. For example, if a model is de-
composed according to the subject clearances, reclas-
sifying objects according to policy rules is still state-
closed. Granting a subject a new clearance, however,
results in removing this subject from the subject set
of the old clearance and adding the subject to the new
clearance’s sub-model. Thus, state-closedness does
not hold anymore. On this account, our decomposi-
tion model supports reclassification of either subjects
or objects. Enabling both requires (i) dynamic sub-
ject and object sets within sub-models, and (ii) the
decomposition heuristics being part of state transition
functions, which is part of our future work.
In summary, a wide variety of state-of-the-art sys-
tems can be modeled by the HRU calculus such that
the method’s requirement of autonomous sub-models
is met. Thus, the proposed decomposition method
takes a general approach and can be applied in nu-
merous application scenarios.
6 CONCLUSIONS
In this paper we described a method for analyzing
the safety properties of general, unrestricted HRU se-
curity models. The idea is to decompose a model
into autonomous sub-models and analyze their safety
properties individually. Because the sub-models are
smaller, they generally are easier to analyze, and
their smaller size significantly reduces the runtime of
heuristic safety analysis algorithms with superlinear
runtime complexity. Because they are autonomous,
sub-models can be analyzed concurrently, allowing
to efficiently exploit grid and multiprocessor/multi-
core architectures. Strict properties of the decomposi-
tion function guarantee that the original model and its
sub-models are structurally equivalent, and that sub-
model safety properties map to the original model.
Finding a proper model decomposition is a chal-
EFFICIENT ALGORITHMIC SAFETY ANALYSIS OF HRU SECURITY MODELS
57

lenge as well as an opportunity: a challenge, because
the sub-models have to meet closeness conditions,
and an opportunity, because human knowledge is ex-
ploited to tackle the computational complexity of the
analysis.
While in general safety properties of HRU secu-
rity models are known to be undecidable, the method
allows for safety analysis in many real-world scenar-
ios. Excerpts from the security policy of a real-world
enterprise resource planning scenario and a discus-
sion of MLS models support this claim.
REFERENCES
Ammann, P. E. and Sandhu, R. S. (1991). Safety Anal-
ysis for the Extended Schematic Protection Model.
In Proc. IEEE Symposium on Security and Privacy.
IEEE Press.
Bell, D. E. and LaPadula, L. J. (1973). Secure Computer
Systems: Mathematical Foundations (Vol.I). Techni-
cal Report AD 770 768, MITRE.
Brewer, D. F. and Nash, M. J. (1989). The Chinese Wall
Security Policy. In Proc. IEEE Symposium on Security
and Privacy. IEEE Press.
Bryce, C., K¨uhnhauser, W. E., Amouroux, R., and Lop´ez,
M. (1997). CWASAR: A European Infrastructure for
Secure Electronic Commerce. Journal of Computer
Security, IOS Press.
Common3.1 (2009). Common Criteria for Information
Technology Security Evaluation, Version 3.1, Revision
3.
Crampton, J. and Khambhammettu, H. (2008). Delegation
in Role-based Access Control. Int. Journal of Infor-
mation Security.
Denning, D. E. (1976). A Lattice Model of Secure Informa-
tion Flow. Communications of the ACM.
Efstathopoulos, P. and Kohler, E. (2008). Manageable Fine-
Grained Information Flow. In Proc. 2008 EuroSys
Conference. ACM SIGOPS.
Goguen, J. and Meseguer, J. (1982). Security Policies and
Security Models. In Proc. IEEE Symposium on Secu-
rity and Privacy. IEEE.
Halfmann, U. and K¨uhnhauser, W. E. (1999). Embedding
Security Policies Into a Distributed Computing Envi-
ronment. Operating Systems Review.
Harrison, M. A. and Ruzzo, W. L. (1978). Monotonic Pro-
tection Systems. In DeMillo, R., Dobkin, D., Jones,
A., and Lipton, R., editors, Foundations of Secure
Computation. Academic Press.
Harrison, M. A., Ruzzo, W. L., and Ullman, J. D. (1975).
On Protection in Operating Systems. Operating Sys-
tems Review, 5th Symposium on Operating Systems
Principles.
Harrison, M. A., Ruzzo, W. L., and Ullman, J. D. (1976).
Protection in Operating Systems. Communications of
the ACM.
Kleiner, E. and Newcomb, T. (2006). Using CSP to Decide
Safety Problems for Access Control Policies. Techni-
cal Report RR-06-04, Oxford University Computing
Laboratory.
Kleiner, E. and Newcomb, T. (2007). On the Decidabil-
ity of the Safety Problem for Access Control Poli-
cies. Electronic Notes in Theoretical Computer Sci-
ence (ENTCS).
Krohn, K. and Rhodes, J. (1965). Algebraic Theory of Ma-
chines. I. Prime Decomposition Theorem for Finite
Semigroups and Machines. Transactions of the Amer-
ican Mathematical Society.
Li, N., Mitchell, J. C., and Winsborough, W. H. (2005). Be-
yond Proof-of-compliance: Security Analysis in Trust
Management. JACM.
Lipton, R. and Snyder, L. (1978). On Synchronization and
Security. In DeMillo, R., Dobkin, D., Jones, A., and
Lipton, R., editors, Foundations of Secure Computa-
tion. Academic Press.
Loscocco, P. A. and Smalley, S. D. (2001). Integrating Flex-
ible Support for Security Policies into the Linux Oper-
ating System. In Cole, C., editor, Proc. 2001 USENIX
Ann. Techn. Conference.
Pittelli, P. A. (1988). The Bell-LaPadula Computer Security
Model Represented as a Special Case of the Harrison-
Ruzzo-Ullman Model. In Proc. National Computer
Security Conference. NBS/NCSC.
Sandhu, R. S. (1992). The Typed Access Matrix Model.
In Proc. IEEE Symposium on Security and Privacy.
IEEE.
Sandhu, R. S., Coyne, E. J., Feinstein, H. L., and Youman,
C. E. (1996). Role-Based Access Control Models.
IEEE Computer.
SAP AG (2009). SAP History. http://www.sap.com/.
Vimercati, S. D. C. d., Samarati, P., and Jajodia, S. (2005).
Policies, Models, and Languages for Access Con-
trol. In 4th Int. Workshop on Databases in Networkes
Information Systems, Volume 3433/2005 of LNCS.
Springer.
SECRYPT 2010 - International Conference on Security and Cryptography
58
