
NON-MONOTONIC REASONING FOR REQUIREMENTS
ENGINEERING
State Diagrams Driven by Plausible Logic
David Billington, Vladimir Estivill-Castro, Rene Hexel and Andrew Rock
School of ICT, Griffith University, Nathan Campus, Nathan, 4111 Queensland, Australia
Keywords:
Automata and logic for system analysis and verification, Petri nets, Requirements engineering.
Abstract:
We extend the state diagrams used for dynamic modelling in object-oriented analysis and design. We sug-
gest that the events which label the state transitions be replaced with plausible logic expressions. The result
is a very effective descriptive and declarative mechanism for specifying requirements that can be applied to
requirements engineering of robotic and embedded systems. The declarative model can automatically be trans-
lated and requirements are traceable to implementation and validation, minimising faults from the perspective
of software engineering. We compare our approach with Petri Nets and Behavior Trees using the well-known
example of the one-minute microwave oven.
1 INTRODUCTION
We extend state transition diagrams in that we al-
low transitions to be labelled by statements of a non-
monotonic logic, in particular Plausible Logic. We
show that this has several benefits. First, it facilitates
requirements engineering. Namely, we show this ap-
proach can be more transparent, clear, and succinct
than other alternatives. Therefore, it enables better
capture of requirements and this leads to much more
effective system development. Furthermore, we show
that such diagrams can be directly, and automatically
translated into executable code, i.e. no introduction of
failures in the software development process.
Finite automata have a long history of mod-
elling dynamic systems and consequently have been
a strong influence in the modelling of the behaviour
of computer systems (Rumbaugh et al., 1991, Biblio-
graphical notes, p. 113-114). System analysis and de-
sign uses diagrams that represent behaviour of com-
ponents or classes. State diagrams (or state machines)
constitute the core behavior modeling tool of object-
oriented methodologies. In the early 90s state ma-
chines became the instrument of choice to model the
behaviour of all the objects of a class. The Object-
Modeling Methodology (OMT) of Rumbaugh et al.
(1991, chapter 5) established state diagrams as the pri-
mary dynamic model. The Shlaer-Mellor approach
established state models to capture the life cycle of
objects of a given class (Shlaer and Mellor, 1992).
Class diagrams capture the static information of all
objects of the same class (what they know, what they
store), but behaviour is essentially described in mod-
els using states and transitions. The prominence of
OMT and Shlaer-Mellor has permeated into the most
popular modelling language for object-orientation,
the Unified Modeling Language (UML). “A state di-
agram describes the behavior of a single class of ob-
jects” (Rumbaugh et al., 1991, p. 90). Although the
state diagrams for each class do not describe the in-
teractions and behaviour of several objects of diverse
classes in action (for this, UML has collaboration dia-
grams and sequence diagrams), they constitute a cen-
tral modelling tool for software engineering.
Although UML and its variants have different lev-
els of formality, in the sense of having a very clear
syntax and semantics, they aim for the highest for-
mality possible. This is because their aim is to re-
move ambiguity and be the communication vehicle
between requesters, stakeholders, designers, imple-
mentors, testers, and users of a software system.
Thus, they offer constraints very similar to the for-
mal finite state machine models. For example, in a
deterministic finite state machine, no two transitions
out of the same state can be labelled with the same
symbol. This is because formally, a deterministic fi-
nite state machine consists of a finite set of states, an
input language (for events), and a transition function.
The transition function indicates what the new state
will be, given an input and the current state. Other
68
Billington D., Estivill-Castro V., Hexel R. and Rock A. (2010).
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic.
In Proceedings of the Fifth International Conference on Evaluation of Novel Approaches to Software Engineering, pages 68-77
DOI: 10.5220/0002998300680077
Copyright
c
SciTePress

Table 1: The Transition Function as a Table.
s
1
c
u
s
i
s
1
c
v
s
j
. . .
s
i
c
x
s
p
adornments include signalling some states as initial
and some as final. However, a fundamental aspect of
finite state machines is that the transition function is
just that, a function (mathematically, a function pro-
vides only one value of the codomain for each value
in the domain).
Granted that the model can be extended to a non-
deterministic machine, where given an input and a
state, a set of possible states is the outcome of the
transition. In this case, the semantics of the behaviour
has several interpretations. For example, in the the-
ory of computation, the so-called power set construc-
tion shows that non-deterministic and deterministic
finite state machines are equivalent. However, other
semantics are possible, such as multi-threaded be-
haviour. Therefore, as a modelling instrument in soft-
ware engineering, it is typically expected that the con-
ditions emanating from a state are mutually exclu-
sive and exhaustive. “All the transitions leaving a
state must correspond to different events” (Rumbaugh
et al., 1991, p. 89). Namely, if the symbol c
i
is a
Boolean expression representing the guard of the tran-
sition, then
W
n
i=1
c
i
= true (the exhaustive condition),
and c
i
∧c
j
= false, ∀ i 6= j (the exclusivity condition).
In fact, Shlaer-Mellor also suggest the analysis should
make use of the State Transition Table (STT) (Shlaer
and Mellor, 1992). Table 1 is the tabular represen-
tation of the transition function “to prevent one from
making inconsistent statements” (Shlaer and Mellor,
1992, p. 52) and they provide an illustration where
two transitions out of the same state and labelled by
the same event are corrected using the table.
Recently, the software engineering community
has been pushing for Requirements Engineering
(RE) (Hull et al., 2005), concerned with identifying
and communicating the objectives of a software sys-
tem, and the context in which it will be used (Nu-
seibeh and Easterbrook, 2000). Hence, RE identifies
and elicits the needs of users, customers, and other
stakeholders in the domain of a software system. RE
demands a careful systematic approach. Significant
effort is to be placed on rigorous analysis and docu-
mented specification, especially for security or safety
critical systems. RE is important because a require-
ment not captured early may result in a very large ef-
fort to re-engineer a deployed system.
2 NON-MONOTONIC LOGIC IN
STATE DIAGRAMS
An ambition of both artificial intelligence (AI) and
software engineering is to be able to only specify
what we want, without having to detail how to achieve
this. The motivation for our approach has a simi-
lar origin. We aim at producing a vehicle of com-
munication that would enable the specification of be-
haviour without the need for imperative programming
tools. Therefore, we want to use a declarative formal-
ism (a similar ambition has lead to the introduction
of logic programming and functional programming).
Non-monotonic logic is regarded as quite compati-
ble with the way humans reason and express the con-
ditions and circumstances that lead to outcomes, as
well as a way to express the refinements and even ex-
ceptions that polish a definition for a given concept.
In fact, non-monotonic reasoning is regarded as one
of the approaches to emulate common-sense reason-
ing (Russell and Norvig, 2002). We illustrate that the
addition of this declarative capability to state transi-
tion diagrams for capturing requirements is beneficial
because the models obtained are much simpler (a fact
necessary to ensure that the natural language descrip-
tion has indeed been captured). This way, we only
need to specify the what and can have all of the how
within an embedded system generated automatically.
With our approach, modelling with state-diagrams
is sufficient to develop and code behaviours. The se-
mantics of a state is that it is lasting in time, while a
transition is assumed to be instantaneous. The state-
diagram correspondsclosely to the formalism of finite
state machines (defined by a set S of states, a transi-
tion function t : S× ϒ → S, where ϒ denotes a possi-
ble alphabet of input symbols). In our case, we can
specify the behaviour by the table that specifies the
transition function t (Table 1).
We still use the notion of an initial state s
0
, be-
cause, in our infrastructure that implements these
ideas (Billington et al., 2009), in some external-state
transition, behaviours must be able to reset them-
selves to the initial state. A final state is not required,
but behaviours should be able to indicate completion
of a task to other modules. Now, current practice
for modelling with finite state machines assumes that
transitions are labelled by events. In both the Shlaer-
Mellor approach and OMT (Rumbaugh et al., 1991),
transitions are labelled by events only. For exam-
ple, in Fig. 1, a transition is labelled by the event
ball visible
(e.g. a sensor has detected a ball). A
slight extension is to allow labels to be a decidable
Boolean condition (or expression) in a logic with val-
ues
true
or
false
(that is, it will always be possi-
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic
69

Figure 1: Simple Finite State Diagram.
ble to find the value of the condition guarding the
transition). This easily captures the earlier model be-
cause rather than labelling by event e, we label by
the Boolean expression e has occured. Our exten-
sion to behaviour modelling extends this further with
the transition labels being any sentence in the non-
monotonic logic. Replacing the guarding conditions
with statements in the non-monotonic logic incorpo-
rates reasoning into the reactive
1
nature of state ma-
chines. Since our logics model reasoning (and be-
liefs like “in this frame vision believes there is no
ball”), they are better suited to model these transitions
(they may even fuse contradicting beliefs reported by
many sensors and modules in a deterministic way),
and gracefully handle situations with incomplete (or
superfluous) information without increasing the cog-
nitive load of the behaviour designer.
The designer can separate the logic model from
the state-transition model. Moreover, the designer
would not be required to ensure the exhaustive nature
of the transitions leading out from a state; as priorities
can indicate a default transition if conditions guarding
other transitions cannot be decided.
“State diagrams have often been criticized be-
cause they allegedly lack expressive power and are
impractical for large problems” (Rumbaugh et al.,
1991, p. 95). However, several techniques such as
nesting state diagrams, state generalisation, and event
generalisation were used in OMT to resolve this issue.
We have shown elsewhere (Billington et al., 2010)
(1) how the technique of nested state diagrams (e.g.
team automata (ter Beek et al., 2003; Ellis, 1997)
handle complexity, and (2) that there is an equiv-
alence between Behavior Trees and state machines,
mitigating the problem of expressive power of state
diagrams for larger systems. In fact our approach fol-
lows the very successful modelling by finite state ma-
chines (Wagner et al., 2006) that has resulted in state-
WORKS, a product used for over decade in the engi-
neering of embedded systems software (Wagner and
Wolstenholme, 2003). In stateWORKS, transitions
are labelled by a small subset of propositional logic,
namely positive logic algebra (Wagner and Wolsten-
1
In the agent model reactive systems are seen as an al-
ternative to logic-based systems that perform planning and
reasoning (Wooldridge, 2002).
holme, 2003), which has no implication, and no nega-
tion (only OR and AND). Thus our use of a non-
monotonic logic is a significant variation.
3 PLAUSIBLE LOGIC
Non-monotonic reasoning (Antoniou, 1997) is the ca-
pacity to make inferences from a database of be-
liefs and to correct those as new information arrives
that makes previous conclusions invalid. Although
several non-monotonic formalisms have been pro-
posed (Antoniou, 1997), The β algorithm for PL uses
the closed world assumption while the π algorithm
uses the open world assumption. the family of non-
monotonic logics called Defeasible Logics has the
advantage of being designed to be implementable.
The main members of this family, including Plausible
Logic (PL), are compared in (Billington, 2008), list-
ing their uses and desirable properties. Although the
most recent member of this family, CDL (Billington,
2008), has some advantages over PL (Billington and
Rock, 2001), the differences are not significant for the
purposes this paper. We shall therefore use PL as its
corresponding programming language, DPL, is more
advanced. If only factual information is used, PL es-
sentially becomes classical propositional logic. But
when determining the provability
2
of a formula, the
proving algorithms in PL can deliverthree values (that
is, it is a three-valued logic), +1 for a formula that
has been proved, −1 for a formula that has been dis-
proved, and 0 when the formula cannot be proved and
attempting so would cause an infinite loop. Another
very important aspect of PL is that it distinguishes be-
tween formulas proved using only factual information
and those using plausible information. PL allows for-
mulas to be proved using a variety of algorithms, each
providing a certain degree of trust in the conclusion.
Because PL uses different algorithms, it can handle
a closed world assumption (where not telling a fact
implies the fact is false) as well as the open world as-
sumption in which not being told a fact means that
nothing is known about that fact.
In PL all information is represented by three kinds
of rules and a priority relation between those rules.
The first type of rules are strict rules, denoted by the
strict arrow → and used to model facts that are cer-
tain. For a rule A → l we should understand that
if all literals in A are proved then we can deduce
l (this is simply ordinary implication). A situation
such as Humans are mammals will be encoded as
human(x) → mammal(x). Plausible rules A ⇒ l use
2
Provability here means determining if the formula can
be verified or proved.
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
70
the plausible arrow ⇒ to represent a plausible situ-
ation. If we have no evidence against l, then A is
sufficient evidence for concluding l. For example,
we write Birds usually fly as bird(x) ⇒ fly(x). This
records that when we find a bird we may conclude
that it flies unless there is evidence that it may not fly
(e.g. if it is a penguin). Defeater rules A ⇀ ¬l say if A
is not disproved, then it is risky to conclude l. An ex-
ample is Sick birds might not fly which is encoded as
{sick(x), bird(x)} ⇀ ¬ fly(x). Defeater rules prevent
conclusions that would otherwise be risky (e.g. from
a chain of plausible conclusions).
Finally, a priority relation > between plausible
rules R
1
> R
2
indicates that R
1
should be used instead
of R
2
. The following example demonstrates the ex-
pressive power of this particular aspect of the formal-
ism:
{} → quail(Quin) Quin is a quail
quail(x) → bird(x) Quails are birds
R
1
: bird(x) ⇒ fly(x) Birds usually fly
From the rule R
1
above, one would logically ac-
cept that Quin flies (since Quin is a bird).
{} → quail(Quin) Quin is a quail
quail(x) → bird(x) Quails are birds
R
2
: quail(x) ⇒ ¬ fly(x) Quails usually do not fly
However, from R
2
, we would reach the (correct)
conclusion that Quin usually does not fly. But what if
both knowledge bases are correct (both R
1
and R
2
are
valid)? We perhaps can say that R
2
is more informa-
tive as it is more specific and so we add R
2
> R
1
to
a knowledge base unifying both. Then PL allows the
agent to reach the proper conclusion that Quin usually
does not fly, while if it finds another bird that is not a
quail, the agent would accept that it flies. What is im-
portant to note here is that if the rule set is consistent,
all proofs withing PL will also be consistent. I.e. as
long as any conflicts between plausible rules are prop-
erly resolved using priority relations, it will never be
possible to prove both a literal l and its negation ¬l at
the same time.
Note that Asimov’s famous Three Laws of
Robotics are a good example of how humans describe
a model. They define a general rule, and the next rule
is a refinement. Further rules down the list continue
to polish the description. This style of development is
not only natural, but allows incremental refinement.
Indeed, the knowledge elicitation mechanism known
as Ripple Down Rules (Compton and Jansen, 1990)
extracts knowledge from human experts by refining a
previous model by identifying the rule that needs to
be expanded by detailing it more.
Table 2: One-Minute Microwave Oven Requirements.
Req. Description
R1
There is a single control button available for the use of the oven.
If the oven is closed and you push the button, the oven will start
cooking (that is, energise the power-tube) for one minute.
R2
If the button is pushed while the oven is cooking, it will cause the
oven to cook for an extra minute.
R3
Pushing the button when the door is open has no effect.
R4
Whenever the oven is cooking or the door is open, the light in the
oven will be on.
R5
Opening the door stops the cooking.
R6
Closing the door turns off the light. This is the normal idle state,
prior to cooking when the user has placed food in the oven.
R7
If the oven times out, the light and the power-tube are turned off
and then a beeper emits a warning beep to indicate that the cook-
ing has finished.
4 A CLASSICAL EXAMPLE
We proceed here to illustrate our approach with an ex-
ample that has been repeatedly used by the software
engineering community, e.g. (Dromey and Powell,
2005; Myers and Dromey, 2009; Shlaer and Mellor,
1992; Wen and Dromey, 2004; Mellor, 2007). This
is the so called one-minute microwave oven (Shlaer
and Mellor, 1992). Table 2 shows the requirements as
presented by Myers and Dromey (Myers and Dromey,
2009, p. 27, Table 1). Although this is in fact not
exactly the same as the original by Shlaer and Mel-
lor (Shlaer and Mellor, 1992, p. 36), we have cho-
sen the former rather than the latter because we will
later compare with Behavior Trees regarding model
size and direct code generation.
4.1 Microwave in Plausible Logic
Because we have a software architecture that handles
communication between modules through a decou-
pling mechanism named the whiteboard (Billington
et al., 2009), we can proceed at a very high level. We
assume that sensors, such as the microwave button,
are hardware instruments that deposit a message on
the whiteboard with the signature of the depositing
module and a time stamp. Thus, events like a but-
ton push or actions such as energising the microwave
tube are communicated by simply placing a message
on the whiteboard.
3
Thus, knowledge of an event like
a button push simply exists because a corresponding
message has appeared on the whiteboard. Similarly,
an action like energising the microwave tube is trig-
3
Matters are a bit more complex, as messages on the
whiteboard expire or are consumed, and for actuators, they
could have a priority and thus actuators can be organised
with “subsumption” (Brooks, 1991).
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic
71

% MicrowaveCook.d
name{MicrowaveCook}.
input{timeLeft}.
input{doorOpen}.
C0: {} => ˜cook.
C1: timeLeft => cook. C1 > C0.
C2: doorOpen => ˜cook. C2 > C1.
output{b cook, "cook"}.
output{b ˜cook, "dontCook"}.
(a) DPL for 2-state machine controlling
tube, fan, and plate.
% MicrowaveLight.d
name{MicrowaveLight}.
input{timeLeft}.
input{doorOpen}.
L0: {} => ˜lightOn.
L1: timeLeft => lightOn. L1 > L0.
L2: doorOpen => lightOn. L2 > L0.
output{b lightOn, "lightOn"}.
output{b ˜lightOn, "lightOff"}.
(b) DPL for 2-state machine
controlling the light.
Figure 2: Simple theories for 2-state machines.
gered by placing a different message on the white-
board. The driver for the corresponding actuator then
performs an action for this particular message as soon
as it appears on the whiteboard.
However, here the label
cook
for the transition
of the state NOT COOKING to the state COOKING and
the label
dontCook
from COOKING to NOT COOKING
are not necessarily events. They are consequents in a
logic model. For example,
dontCook
is an output of
such a model that acts as the cue to halt the cooking.
The logic model will specify the conditions by which
this cue is issued. Fig. 2a shows the logic model
in the logic programming language DPL that imple-
ments PL. In the case of the microwave oven require-
ments, for the purposes of building a model, a system
analyst or software engineer would first identify that
there are two states for various actuators. When the
oven is cooking, the fan is operating, the tube is en-
ergised and the plate is rotating. When the oven is
not cooking, all these actuators are off. The approach
can be likened to arranging the score for an orches-
tra: all these actuators will need the same cues from
the conductor (the control) and, in this example, all
switch together from the state of COOKING to the state
of NOT COOKING and vice versa. They will all syn-
chronously consume the message to be off or to be on.
Thus, we have a simple state diagram to model this
(Fig. 3a). By default, we do not have the conditions
to cook. This is Rule
C0
in the logic model (called a
(a) A 2-state machine for controlling
tube, fan, and plate.
(b) A 2-state machine for
controlling the light.
Figure 3: Simple 2-state machines control most of the mi-
crowave.
theory) relevant to the cooking actuators. However, if
there is time left for cooking, then we have the con-
ditions to cook (Rule
C1
) and this rule takes priority
over
C0
. However, when the door opens, then we do
not cook:
C2
takes priority over
C1
.
The light in the microwave is on when the door is
open as well as when the microwave is cooking. So,
the cues for the light are not the same as those for en-
ergising the tube. However, the light is in only one of
two states LIGHT OFF or LIGHT ON. The default state
is that the light is off. This is Rule
L0
in the theory for
the light (see Fig. 2b). However, when cooking the
light is on. So Rule
L1
has priority over
L0
. There is a
further condition that overwrites the state of the light
being off, and that is when the door is open (Rule
L2
).
Note that in this model, the two rules
L1
and
L2
over-
ride the default Rule
L0
, while in the model for cook-
ing the priorities caused each new rule to refine the
previous rule. The control button (Fig. 4) also has
two states. In one state, CB ADD, the time left can
be incremented, while in the other state, pushing the
button has no effect. Again, between these two states
we place transitions labelled by an expression of PL
(in all cases, simple outputs of a theory). The control
button does not add time unless the button is pushed.
This is reflected by Rule
CB0
and Rule
CB1
below and
the priority that
CB1
has over
CB0
. When the door
is open, pushing the button has no effect; this is Re-
quirement R3 and expressed by Rule
CB2
and its pref-
erence over
CB1
. Because we already have defined
that a push of a button adds time to the timer (except
for the conditions already captured), if the button is
not pushed, then we do not add time. This is a strict
rule that in DPL is expressed by a disjunction.
The final requirement to model is the bell, which
is armed while cooking, and rings when there is no
time left. This is the transition
noTimeLeft
from
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
72

(a) State machine
% MicrowaveButton.d
name{MicrowaveButton}.
input{doorOpen}.
input{buttonPushed}.
CB0: {} => ˜add.
CB1: buttonPushed => add. CB1 > CB0.
CB2: doorOpen => ˜add. CB2 > CB1.
\/{buttonPushed, wait}.
output{b add, "add"}.
output{b wait, "wait"}.
(b) DPL theory
Figure 4: The modelling of the button’s capability to add to
the timer.
(a) Bell state machine
% MicrowaveBell.d
name{MicrowaveBell}.
input{timeLeft}.
output{b ˜timeLeft, "noTimeLeft"}.
(b) DPL theory for the bell.
Figure 5: The modelling of the bell’s capability to ring when
the time expires.
BELL ARMED to BELL RINGING in Fig. 5. After ring-
ing, the bell is off, and when cooking time is added
to the timer, it becomes armed. The logical model is
extremely simple, because the condition that departs
from BELL ARMED to BELL RINGING is the negation of
the one that moves from to BELL OFF to BELL ARMED.
Moreover, we always move from BELL RINGING to
BELL OFF. The most important aspect of this approach
is that this is all the software analysis required in or-
der to obtain the working program.
#define dontCook ( \
doorOpen \
|| !timeLeft \
)
#define cook ( \
!doorOpen && timeLeft \
)
(a) Tube, fan and plate
#define lightOff ( \
!doorOpen && !timeLeft \
)
#define lightOn ( \
doorOpen \
|| timeLeft \
)
(b) The light
#define add ( \
buttonPushed && !doorOpen \
)
#define wait ( \
!buttonPushed \
)
(c) Button and timer
#define noTimeLeft ( \
!timeLeft \
)
(d) The bell
Figure 6: Translated C expressions for transitions.
4.2 Translation into Code
Once the high level model has been established in
DPL, translation into code is straightforward. A
Haskell proof engine implementation of DPL allows
the interpretation and formal verification of the devel-
oped rule sets (Billington and Rock, 2001). This im-
plementation was extended to include a translator that
generates code that can be used in C, C++, Objective-
C, C# and Java. The Haskell translator creates op-
timised Boolean expressions through the truth tables
generated from the DPL rules. These Boolean ex-
pressions are then written out as C code that can di-
rectly be compiled and linked with libraries and appli-
cation code. Incidentially, the C syntax for Boolean
expressions is not only the same in supersets of C
(such as C++ and Objective-C), but also in modern,
related programming languages such as Java
4
.
Figure 6 shows the DPL theories for the state dia-
gram transitions translated into C by the Haskell proof
engine. This code can then directly be used as a
header file for a generic embedded system state ma-
chine to test the transition conditions. Subsequent re-
finements of the rules do not require any changes to
the generic state machine code. A simple recompila-
tion against the updated, generated header files is suf-
ficient to update the behaviour of the state machine.
5 EVALUATION
The original approaches to modelling behaviour with
finite state diagrams (Rumbaugh et al., 1991; Shlaer
4
At this stage, expressions are generated using the
#define
preprocessor syntax, that is not supported directly
in Java, but can easily be extracted using a script or even
copy and paste.
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic
73

and Mellor, 1992) had little expectation that the mod-
els would directly translate to implementations with-
out the involvement of programmers using imperative
object-oriented programming languages. However,
the software development V-model (Wiegers, 2003)
has moved the focus to requirements modelling, and
then directly obtaining a working implementation, be-
cause this collapses the requirements analysis phase
with the verification phase. There are typically two
approaches. First, emulating or simulating the model,
which has the advantage that software analysts can
validate the model and implementation by running
as many scenarios as possible. The disadvantage is
the overhead incurred through the interpretation of
the model, rather than its compilation. The second
approach consists of generating code directly from
the model (Wagner and Wolstenholme, 2003; Wagner
et al., 2006). This removes the overhead of interpret-
ing at run-time the modelling constructs. Approaches
to the automatic execution or translation of models
for the behaviour of software have included the use
of UML state diagrams for generating code (Mellor,
2007), the automatic emulation or code generation
from Petri nets (Girault and Valk, 2001), and the au-
tomatic emulation or code generation from Behavior
Trees (Wen and Dromey, 2004; Wen et al., 2007b;
Wen et al., 2007a). A more recent trend is mod-
els@run.time, where “there is a clear pressure arising
for mirroring the problem space for more declarative
models” (Blair et al., 2009).
5.1 Contrast with State Diagrams
Simulation and direct generation of code from a state
diagram is clearly possible, since one only needs to
produce generic code that reads the transition table
(encoded in some standard form), then deploy and
interpret that repeatedly by analysing the events re-
ceived as well as the current state, and moving to the
proper subsequent state. This has been suggested for
UML (Mellor, 2007) and is the basis of the design pat-
tern
state
(Larman, 1995, p. 406). However, while
Finite State Machines continue to enjoy tremendous
success (Wagner and Wolstenholme, 2003), “there is
no authoritativesource for the formalsemantics of dy-
namic behavior in UML” (Winter et al., 2009). The
best example for the success of Finite State Machines
is stateWorks (
www.stateworks.com
) and its method-
ology (Wagner et al., 2006). We have downloaded
the 60-day free license of stateWorks Studio and the
SWLab simulator (Fig. ??). Note that this finite state
machine has only 5 states (the documentation of this
example with stateWorks admits the model has is-
sues, e.g. “to reset the system for the next start, we
Figure 7: The execution of the example model provided in
the demo version of stateWorks for a microwave oven.
have to open and then close the door” and “the con-
trol system always starts even when the timeout value
is 0”). These issues can be fixed but additional infras-
tructure is necessary, including ‘counters’ and ‘switch
points’ as well as usage of the ‘real time database
(RTDN)’. The stateWorks example describes generic
of microwave behaviour and needs some more polish-
ing to capture more detailed requirements e.g. those
outlined in Table 2. Since we argue in favour of us-
ing finite state machines for modelling behaviour, this
tool concurs with that approach. However, our eval-
uation confirms that using PL is more powerful and
closer to the original specification than the “positive-
logic” transitions in stateWorks.
5.2 Contrast with Petri Nets
Petri Nets (Peterson, 1977; Holloway et al., 1997)
provide a formal model for concurrency and synchro-
nisation that is not readily available in state diagrams.
Thus, they offer the possibility of modelling multi-
threaded systems that support requirements for con-
currency. Early in the modelling effort Petri Nets
were dismissed: “Although they succeed well as an
abstract conceptual model, they are too low level
and inexpressive to be useful to specify large sys-
tems” (Rumbaugh et al., 1991, p. 144). However,
because it is quite possible to simulate or interpret a
Petri Net (or to generate code directly from it), they
continue to be suggested as an approach to directly
obtain implementations from the coding of the re-
quirements (Gold, 2004; Lian et al., 2008; Lakos,
2001; Saldhana and Shatz, 2000).
We have used PIPE 2.5 (
pipe2.sf.net
) to con-
struct a model of the microwave as per the require-
ments in Table 2 (see Fig. 8). It becomes rapidly ap-
parent that the synchronisation of states between com-
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
74
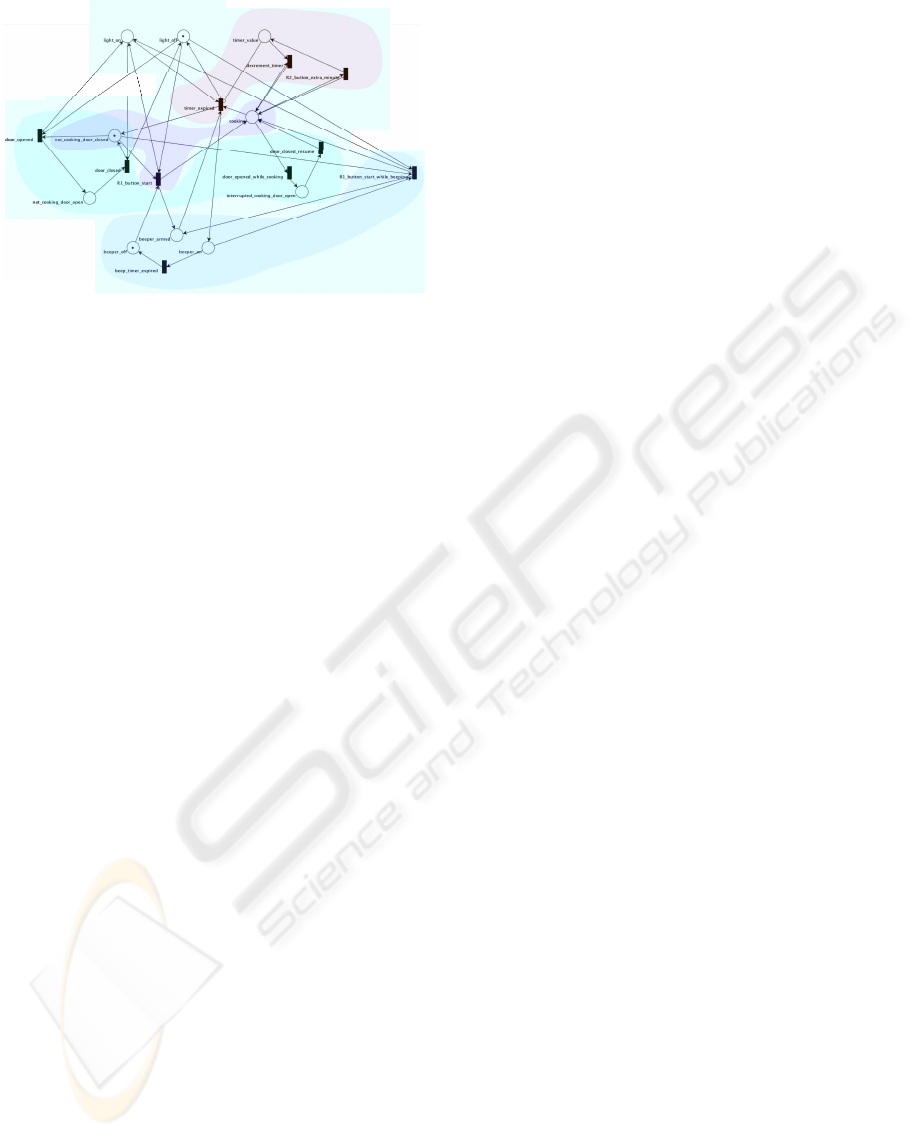
Figure 8: Capturing the requirements in Table 2 as a Petri
Net, grouped by the various components of the microwave.
ponents of the system forces to display connectors
among many parts in the layout, making the model
hard to grasp.Even if we consider incremental devel-
opment, each new requirement adds at least one place
and several transitions from/to existing places. There-
fore, we tend to agree that even for this small case
of the one-minute microwave, the Petri Net approach
seems too low level and models are not providing a
level of abstraction to assist in the behaviour engi-
neering of the system. One advantage of Petri Net
models is that there are many tools and algorithms
for different aspects of their validation. For example,
once a network is built with
PIPE
, this software has
algorithms to perform GSPN Analysis, FSM analy-
sis, and Invariant Analysis. However, even for this
example, considered simple and illustrative in many
circles, the model is not a suitable input for any of the
verification analysis in
PIPE
. On a positive note, some
first-order logics have been included in transitions to
create Predicate/Transition Nets (Genrich and Laut-
enbach, 1979; Genrich, 1991). Consequently, we see
no reason why our approach to use a non-monotonic
logic cannot be applied to Petri Nets.
5.3 Contrast with Behavior Trees
Behavior Trees (Wen et al., 2007a) is another pow-
erful visual approach for Behaviour Engineering (the
systematic progression from requirements to the soft-
ware of embedded systems). The approach provides
a modelling tool that constructs acyclic graphs (usu-
ally displayed as rooted tree diagrams) as well as
a Behavior Modelling Process (Dromey and Powell,
2005; Myers and Dromey, 2009) to transform nat-
ural language requirements into a formal set of re-
quirements. The Embedded Behavior Runtime En-
vironment (eBRE) (Myers and Dromey, 2009) exe-
cutes Behavior Tree models by applying transforma-
tions and generating C source code. The tool Be-
havior Engineering Component Integration Environ-
ment (BECIE) allows Behavior Trees to be drawn
and simulated. Proponents of Behavior Trees argue
that these diagrams enable requirements to be de-
veloped incrementally and that specifications of re-
quirements can be captured incrementally (Wen et al.,
2007b; Wen and Dromey, 2004). The classic exam-
ple of the one-minute microwave has also been ex-
tensively used by the Behavior Tree community (Wen
and Dromey, 2004; Dromey and Powell, 2005; Myers
and Dromey, 2009). Unfortunately, for this example,
Behavior Trees by comparison are disappointing. In
the initial phase of the method, requirements R1, R2,
R5, R6 in Table 2 use five boxes (Wen and Dromey,
2004; Dromey and Powell, 2005), while R3 and R4
demand four. Six boxes are needed for requirement
R7 (Wen and Dromey, 2004; Dromey and Powell,
2005). Then, the Integration Design Behavior Tree
(DBT) demands 30 nodes (see (Dromey and Powell,
2005, p. 9) and (Wen and Dromey, 2004, Fig. 5)). By
the time it becomes a model for eBRE the microwave
has 60 nodes and 59 links! (Myers and Dromey, 2009,
Fig. 6) and the Design Behavior Tree (Myers and
Dromey, 2009, Fig. 8) does not fit legibly on an A4
page. Sadly, the approach seems to defeat its pur-
pose, because on consideration of the system bound-
aries (Myers and Dromey, 2009, Fig. 7), outputs to
the alarm are overlooked. Moreover, the language for
logic tests in the tools for Behavior Trees is far more
limited than even the ‘positive-logic’ of stateWORKS.
The equivalence between finite state machines and
Behavior Trees (Billington et al., 2010) is based on
the observation that Behavior Trees correspond to the
depth-first search through the treads of the states of
the system behaviour control. It is not surprising that
the notion needs far more nodes and connections than
the corresponding finite state machine.
6 FINAL REMARKS
We stress two more aspects of the comparison. First,
the approaches above attempt, in one way or another,
to construct the control unit of the embedded system,
and from it the behaviour of all of its components.
This implies that the control unit has a state space
that is a subset of the Cartesian product of the states
of the components. Our approach is more succinct
not only because of a more powerful logic to describe
state transition, but because our software architecture
decouples control into descriptions for the behaviour
of components. Second, our experience with this ap-
proach and the development of non-monotonic mod-
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic
75

Figure 9: Hardware running Java generated code.
els show that capturing requirements is structured and
incremental, enabling iterative refinement. That is,
one can proceed from the most general case, and pro-
duce rules and conditions for more special cases. We
ensured that our method delivers executable embed-
ded systems directly from the modelling by imple-
menting an oven where the hardware is constructed
from LEGO Mindstorm pieces, sensors, and actuators
(see Fig. 9). As with eBRE, we output Java source
code but execute a finite state machine. The execu-
tion then is verified because of the clear connection
between the model and the source code (as well as
testing it on the hardware).
5
REFERENCES
Antoniou, G. (1997). Nonmonotonic Reasoning. MIT Press,
Cambridge, Mass. ISBN 0-262-01157-3.
Billington, D. (2008). Propositional clausal defeasible
logic. In Holldobler, S., Lutz, C., and Wansing,
H., editors, Logics in Artificial Intelligence, volume
5293 of Lecture Notes in Artificial Intelligence, pages
34–47, Dresden, Germany. 11th European Confer-
ence on Logics in Artificial Intelligence (JELIA2008),
Springer.
Billington, D., Estivill-Castro, V., Hexel, R., and Rock,
A. (2009). Architecture for hybrid robotic behavior.
In Corchado, E., Wu, X., Oja, E., Herrero, A., and
Baruque, B., editors, 4th International Conference on
Hybrid Artificial Intelligence Systems HAIS, volume
5572, pages 145–156. Springer-Verlag Lecture Notes
in Computer Science.
Billington, D., Estivill-Castro, V., Hexel, R., and Rock, A.
(2010). Plausible logic facilitates engineering the be-
havior of autonomous robots. In Proceedings of the
IASTED Software Engineering Conference.
5
See www.youtube.com/watch?v=iEkCHqSfMco for
the system in operation. The corresponding Java sources
and incremental Petri net stages for Fig. 8 are at vladestivill-
castro.net/additions.tar.gz as well as material from (Billing-
ton et al., 2010).
Billington, D. and Rock, A. (2001). Propositional plausible
logic: Introduction and implementation. Studia Log-
ica, 67:243–269. ISSN 1572-8730.
Blair, G., Bencomo, N., and Frnce, R. B. (2009). Mod-
els@run.time. IEEE Computer, 42(10):22–27.
Brooks, R. (1991). Intelligence without reason. In My-
opoulos, R. and Reiter, R., editors, Proceedings of
the 12th International Joint Conference on Artificial
Intelligence, pages 569–595, San Mateo, CA. ICJAI-
91, Morgan Kaufmann Publishers. Sydney, Australia.
ISBN 1-55860-160-0.
Compton, P. and Jansen, R. (1990). A philosophical basis
for knowledge acquisition. Knowledge Acquisition,
2(3):241–257. ISSN 0001-2998.
Dromey, R. G. and Powell, D. (2005). Early requirements
defect detection. TickIT Journal, 4Q05:3–13.
Ellis, C. (1997). Team automata for groupware systems. In
GROUP ’97: Proceedings of the international ACM
SIGGROUP conference on Supporting group work,
pages 415–424, New York, NY, USA. ACM.
Genrich, H. J. (1991). Predicate/transition nets. In
Jensen, K. and Rozenberg, G., editors, High-level
Petri Nets, Theory and Applications, pages 3–43.
Springer-Verlag.
Genrich, H. J. and Lautenbach, K. (1979). The analysis of
distributed systems by means of predicate/transition-
nets. In Kahn, G., editor, Semantics of Concurrent
Computation, Proceedings of the International Sym-
posium, volume 70 of Lecture Notes in Computer Sci-
ence, pages 123–147, Evian, France. Springer.
Girault, C. and Valk, R. (2001). Petri Nets for System Engi-
neering: A Guide to Modeling, Verification, and Ap-
plications. Springer-Verlag New York, Inc., Secaucus,
NJ, USA.
Gold, R. (2004). Petri nets in software engineering. Arbeits-
berichte Working Papers. Fachhochschule Ingolstadt,
University of Applied Sciences.
Holloway, L., Kroch, B., and Giua, A. (1997). A survey
of Petri net methods for controlled discrete event sys-
tems. Discrete Event Dynamic Systems: Theory and
Applications, 7:151–190.
Hull, E., Jackson, K., and Dick, J. (2005). Requirements
Engineering. Springer, USA, second edition.
Lakos, C. (2001). Object oriented modeling with object
petri nets. In Agha, G., de Cindio, F., and Rozen-
berg, G., editors, Concurrent Object-Oriented Pro-
gramming and Petri Nets, Advances in Petri Nets,
volume 2001 of Lecture Notes in Computer Science,
pages 1–37. Springer.
Larman, C. (1995). Applying UML and Patterns: An In-
troduction to Object-Oriented Analysis and Design
and Iterative Development. Prentice-Hall, Inc., En-
glewood Cliffs, NJ.
Lian, J., Hu, Z., and Shatz, S. M. (2008). Simulation-based
analysis of UML statechart diagrams: Methods and
case studies. The Software Quality Journal, 16(1):45–
78.
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
76

Mellor, S. J. (2007). Embedded systems in UML. OMG
White paper. www.omg.org/news/whitepapers/ label:
We can generate Systems Today.
Myers, T. and Dromey, R. G. (2009). From requirements
to embedded software - formalising the key steps.
In 20th Australian Software Engineering Conference
(ASWEC), pages 23–33, Gold Cost, Australia. IEEE
Computer Society.
Nuseibeh, B. and Easterbrook, S. M. (2000). Requirements
engineering: a roadmap. In ICSE - Future of SE Track,
pages 35–46.
Peterson, J. L. (1977). Petri nets. Computer Surveys,
9(3):223–252.
Rumbaugh, J., Blaha, M. R., Lorensen, W., Eddy, F., and
Premerlani, W. (1991). Object-Oriented Modelling
and Design. Prentice-Hall, Inc., Englewood Cliffs,
NJ.
Russell, S. and Norvig, P. (2002). Artificial Intelligence:
A Modern Approach. Prentice-Hall, Inc., Englewood
Cliffs, NJ, second edition. ISBN 0130803022.
Saldhana, J. A. and Shatz, S. M. (2000). Uml diagrams
to object petri net models: An approach for mod-
eling and analysis. In International Conference on
Software Engineering and Knowledge Engineering
(SEKE), pages 103–110, Chicago.
Shlaer, S. and Mellor, S. J. (1992). Object lifecycles : mod-
eling the world in states. Yourdon Press, Englewood
Cliffs, N.J.
ter Beek, M., . Ellis, C., Kleijn, J., and Rozenberg, G.
(2003). Synchronizations in team automata for group-
ware systems. Computer Supported Cooperative Work
(CSCW), 12(1):21–69.
Wagner, F., Schmuki, R., Wagner, T., and Wolstenholme,
P. (2006). Modeling Software with Finite State Ma-
chines: A Practical Approach. CRC Press, NY.
Wagner, F. and Wolstenholme, P. (2003). Modeling and
building reliable, re-useable software. In Engineer-
ing of Computer-Based Systems (ECBS-03), IEEE In-
ternational Conference on the, pages 277–286, Los
Alamitos, CA, USA. IEEE Computer Society.
Wen, L., Colvin, R., Lin, K., Seagrott, J., Yatapanage, N.,
and Dromey, R. (2007a). “Integrare”, a collaborative
environment for behavior-oriented design. In Luo, T.,
editor, Cooperative Design, Visualization, and Engi-
neering, 4th International Conference, CDVE, volume
4674 of Lecture Notes in Computer Science, pages
122–131, Shanghai, China. Springer.
Wen, L. and Dromey, R. G. (2004). From requirements
change to design change: A formal path. In 2nd In-
ternational Conference on Software Engineering and
Formal Methods (SEFM 2004), pages 104–113, Bei-
jing, China. IEEE Computer Society.
Wen, L., Kirk, D., and Dromey, R. G. (2007b). A tool to vi-
sualize behavior and design evolution. In Di Penta, M.
and Lanza, M., editors, 9th International Workshop
on Principles of Software Evolution (IWPSE 2007),
in conjunction with the 6th ESEC/FSE joint meeting,
pages 114–115, Dubrovnik, Croatia. ACM.
Wiegers, K. E. (2003). Software Requirements. Microsoft
Press, second edition.
Winter, K., Colvin, R., and Dromey, R. G. (2009). Dy-
namic relational behaviour for large-scale systems.
In 20th Australian Software Engineering Conference
(ASWEC 2009), pages 173–182, Gold Cost, Australia.
IEEE Computer Society.
Wooldridge, M. (2002). An Introduction to MultiA-
gent Systems. John Wiley & Sons, NY, USA.
ISBN 047149691X.
NON-MONOTONIC REASONING FOR REQUIREMENTS ENGINEERING - State Diagrams Driven by Plausible Logic
77
