
REGISTRATION OF INDOOR 3D RANGE IMAGES USING
VIRTUAL 2D SCANS
Marco Langerwisch and Bernardo Wagner
Institute for Systems Engineering, Real Time Systems Group
Leibniz Universit
¨
at Hannover, Appelstraße 9A, D-30167 Hannover, Germany
Keywords:
3D laser range finders, Scan matching, Point cloud registration, Iterative closest point algorithm, Virtual 2D
scans, Real time, Mobile robots.
Abstract:
For mapping purposes, autonomous robots have to be capable to register 3D range images taken by 3D laser
sensors into a common coordinate system. One approach is the Iterative Closest Point (ICP) algorithm. Due
to its high computational costs, the ICP algorithm is not suitable for registering 3D range images online.
This paper presents a novel approach for registering indoor 3D range images using orthogonal virtual 2D
scans, utilizing the typical structure of indoor environments. The 3D registration process is split into three 2D
registration steps, and hence the computational effort is reduced. First experiments show that the approach is
capable of registering 3D range images much more efficient than ICP algorithm and in real time.
1 INTRODUCTION
Autonomous robots dealing with localization and
navigation often do not have a map of their environ-
ment available in advance. In this case, the robot has
to build a map on its own, based on some perceptual
sensing. While conventional approaches use 2 dimen-
sional (2D) mapping (Thrun, 2003), where three de-
grees of freedom (3DoF) have to be considered, re-
cent approaches use 3 dimensions (3D) with its six
degrees of freedom (6DoF), i.e. the x, y and z coordi-
nates, and the roll, pitch, and yaw angles.
One approach used here for sensing the environ-
ment in three dimensions are 3D laser range finders.
To build a map out of these captured single 3D range
images, the rotation and translation have to be calcu-
lated to assemble these images into a common global
coordinate system.
Lots of research work has been done in mapping
two 3D range images into a common coordinate sys-
tem. One approach is to use the Iterative Closest Point
(ICP) algorithm. It calculates the point correspon-
dences between the two images minimizing a mean
square error function. Disadvantages of this approach
are the computational costs due to the high number
of 3D points, and therefore the execution time of the
registration. For example, research in accelerating
the ICP algorithm for 3D point mapping is done by
(N
¨
uchter et al., 2007). They use the algorithm to regi-
ster 3D range images taken by a robot equipped with
a tiltable 2D SICK laser range finder (N
¨
uchter et al.,
2005), trying to accelerate the 3D registration by us-
ing different representations of the 3D scans, and
point reduction during the ICP algorithm.
Based on the typical orthogonality found in in-
door environments (Nguyen et al., 2007) presents a
lightwight localization and mapping algorithm. The
main idea is to reduce complexity by mapping only
planes that are parallel or perpendicular to each other.
Because objects with different shapes are ignored, the
resulting map does not contain any of these features.
A very similar approach to the contribution of our
paper is presented in (Jez, 2008). The author first ex-
tracts leveled maps of the 3D range images. This is
done by aligning the range images with the horizon-
tal plane and then extracting points of vertical struc-
tures. These leveled maps are passed to a 2D ICP al-
gorithm to calculate rotation and translation in 3DoF
which are applied to the 3D range images. To obtain
the final 6DoF transformation, the transformed range
images are passed to a full 3D ICP algorithm. Draw-
backs are the inability to deal with dynamic obstacles
in this approach, and the full ICP at the end, that has
high computational costs again.
In contrast, our aim is to avoid a full 3D ICP com-
putation. Moreover, our approach is able to cope with
dynamic objects and non-rectangular shaped indoor
structures like round columns. It accelerates the range
327
Langerwisch M. and Wagner B. (2010).
REGISTRATION OF INDOOR 3D RANGE IMAGES USING VIRTUAL 2D SCANS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 327-332
DOI: 10.5220/0003003303270332
Copyright
c
SciTePress

image registration in indoor enviroments compared to
6DoF ICP to let the robot register range images on-
line. The structure of indoor environments is used to
extract virtual 2D scans with a much lower number
of points. Having three orthogonal virtual 2D scans,
each of these can be registered very fast via 2D ICP
to calculate rotation and translation. Finally, we com-
bine the 2D transformations to get full 3D rotation
and translation. First experiments show that with our
approach, a mobile robot becomes capable to register
3D range images in real time with similar quality to
3D ICP registration.
The following section outlines the ICP algorithm
and some needed notations, while section 3 describes
the basic concepts of virtual 2D scans. Our new ap-
proach itself is presented in section 4, and section 5
shows experimental results that we obtained on one
of our service robots. This paper closes with a con-
clusion and an outlook on future work.
2 ITERATIVE CLOSEST POINT
ALGORITHM
To merge two images that have at least partial cover-
age into one common coordinate system, transforma-
tion (R,t) consisting of translation vector t and rota-
tion matrix R have to be calculated. This process is
called registration. One approach to register two im-
ages is the Iterative Closest Point (ICP) algorithm in-
vented by (Besl and McKay, 1992), and (Chen and
Medioni, 1991). It calculates the point correspon-
dences between the two images while trying to min-
imize a mean square error function. An initial pose
estimate is needed, so the ICP is a local registration
algorithm (Magnusson et al., 2009).
The ICP algorithm registers a range image, given
by a data point set D = (d
1
, ..., d
N
D
), into the coordi-
nate system of a range image, given by model point
set M = (m
1
, ..., m
N
M
), to minimize the error function
e(R,t) =
N
M
∑
i=1
N
D
∑
j=1
w
i, j
k m
i
− (Rd
j
+t) k
2
(1)
with w
i, j
assigned 1 if m
i
is the closest point for d
j
,
otherwise 0.
N =
N
M
∑
i=1
N
D
∑
j=1
w
i, j
(2)
is the number of points taken into account for its cal-
culation.
The main challenges here are how to compute the
closest points and the transformation (R,t) efficiently.
In our implementation we use a k-d-tree, a general-
ization of binary search trees, as point representation
for finding the closest point correspondences (Bent-
ley, 1975), and an algorithm based on singular value
decomposition (SVD) (Arun et al., 1987) to compute
the transformation (R,t).
3 VIRTUAL 2D SCANS
Calculating with full 3D raw point data sets is very
computational demanding. The aim of virtual 2D
scans is to reduce these 3D point sets to 2D point
sets (Wulf et al., 2004). Virtual 2D scans are cal-
culated regarding a special purpose, e.g. localization
or navigation. For this special purpose, the raw 3D
range images include many redundant and unneces-
sary information, and points respectively. Extracting
points without losing relevant information and pro-
jecting them at a 2D plane reduces subsequent com-
putational costs, because 2D algorithms can be used
with a relative small number of points instead of 3D
algorithms.
According to (Wulf, 2008), virtual 2D scans are
calculated in two steps. First, reduce the amount of
points of the 3D point set S:
f : S → S
r
, having S
r
⊂ S. (3)
The size of the new point set S
r
is l |S|. Function f
depends on the special purpose of the virtual 2D scan
and will be defined in the next section.
In the second step the virtual 2D scan V
S
is calcu-
lated from the reduced point set S
r
by
g : (x,y, z) → (x, y), x,y, z ∈ R, (4)
where x, y and z are the x, y and z coordinates of a
3D point. Equation 4 projects the 3D points of the
reduced point set S
r
on the 2D plane.
Provided that (3) fits the purpose of this reduction,
all relevant information are kept in the virtual 2D scan
V
S
, and subsequent algorithms will be computation-
ally less demanding.
4 3D RANGE IMAGE
REGISTRATION
The following subsection reveals the basic concept
underlying our approach, while in section 4.2 the ac-
tual algorithm we used for registering 3D range im-
ages via virtual 2D scans is described. The special
virtual 2D scans used in our algorithm are presented
in section 4.3.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
328

4.1 Splitting of 6DoF Transformations
The basic idea behind our approach is that a 6DoF
transformation can be split up into several transfor-
mations, each having less than six degrees of freedom.
Each single transformation can then be computed by
an ICP algorithm with much higher efficiency than
full 6DoF ICP, resulting in a smaller total computa-
tion time. The single transformations are combined
subsequently to gain the full 6DoF transformation.
Our approach is to split the 6DoF transformation
into three 2D transformations that can each be cal-
culated by a 2D ICP algorithm. For calculating the
transformations, we extract three orthogonal virtual
2D scans. In our case, these virtual 2D scans are
aligned along the x-y-plane, the x-z-plane, and the y-
z-plane respectively. Using virtual 2D scans utilizes
the advantages described in the previous section. Vir-
tual 2D scans can cope with every shape in indoor
environments, round columns for example. They can
be defined insensitive to dynamic objects.
4.2 Registration Algorithm
It is assumed that the x-axis points forwards from the
robot, the y-axis to the right and the z-axis down-
wards. The functions according to (3) of the virtual
2D scans will be described in the next subsection.
Moreover, we assume that the scans to be registered
are coarsely aligned by an initial pose estimate, e.g.
by odometry or a gyrometer on a moving platform.
Hence, the approach presented is a local registration
algorithm just as the ICP. The 3D data point set D is
to be registered into the coordinate system of the 3D
model point set M.
First, a virtual 2D scan of the x-y-plane is ex-
tracted from both 3D point sets. Then, we compute
a 2D ICP algorithm as described in section 2. We get
the 2D rotation matrix R
xy
and the 2D translation vec-
tor t
xy
. Apply the rotation matrix
R
0
=
R
xy
0
0 1
(5)
and the translation vector
t
0
=
t
xy
1
t
xy
2
0
T
(6)
to the data point set D.
Next, extract virtual 2D scans of the x-z-plane from
M and D
0
. Compute a 2D ICP algorithm as described
in section 2. We get the 2D rotation matrix R
xz
and the
2D translation vector t
xz
. Calculate rotation matrix
R
00
=
R
xz
11
0 R
xz
12
0 1 0
R
xz
21
0 R
xz
22
. (7)
Because we translated in x- and y-direction in the pre-
vious step, we just use the translation in z-direction:
t
00
=
0 0 t
xz
2
T
(8)
Apply R
00
and t
00
to the data point set D
0
transformed
in the previous step.
Finally, extract virtual 2D scans of the y-z-plane from
M and D
00
and compute a 2D ICP algorithm as de-
scribed in section 2. We get the 2D rotation matrix
R
yz
and the 2D translation vector t
yz
. Calculate rota-
tion matrix
R
000
=
1 0
0 R
yz
. (9)
Because translation in all three directions has been
calculated before, no more translation is applied in
this step.
The global rotation matrix calculates to
R = R
000
· R
00
· R
0
, (10)
and the global translation vector calculates to
t = R
000
· R
00
·t
0
+ R
000
·t
00
. (11)
Finally, the registered data point set is
D
reg
= R · D + t. (12)
A limitation of this algorithm is the assumption
of small errors in the initial pose estimate. Having
larger errors, the convergence of each single step to
an optimal solution does not guarantee global opti-
mality. Other variations of this algorithm are subject
of current research, for example the introduction of
iteration steps. Nevertheless, the previous algorithm
has shown promising results even in case of errors in
initial alignment (see section 5).
4.3 Virtual 2D Scans for Registration
Three virtual 2D scans are needed, one for the x-y-
plane, one for the x-z-plane and one for the y-z-plane.
The calculation is based on the assumption that the 3D
range image is given by a point cloud having all scan
points aligned in vertical columns and horizontal rows
with reference to the center of the scanning device.
Here, the assumption is met because we use a yawing
3D scan (Wulf et al., 2004). In case of other scanning
devices, the 3D points have to be reordered first.
For the x-y-plane, the indoor landmark scan from
(Wulf, 2008) is taken. It extracts landmarks of clut-
tered indoor scenes like offices or corridors. Be-
cause of its robustness against dynamic objects and
occluded walls and its ability to cope with non-
rectangular shaped environments, it fits very well for
our purposes. The idea is to extract one point per ver-
tical column that has the largest radial distance to the
REGISTRATION OF INDOOR 3D RANGE IMAGES USING VIRTUAL 2D SCANS
329
scan root. Function f of (3) is defined accordingly.
In indoor environments, we get a kind of ground plan
because usually the point with the largest radial dis-
tance lies on a wall. If a wall is discontinuous due to
doors or gangways, the following wall is extracted to
the virtual 2D scan.
When computing the virtual 2D scan for the x-z-
and the y-z-planes, the 3D scans have already been
rotated around the z-axis and translated in x- and y-
direction (see section 4.2). Hence we need to cal-
culate the rotation around the x- and y-axis, and the
translation in z-direction using virtual 2D scans. Our
approach puts planes orthogonal to x- and y-axis re-
spectively into the coordinate system. Points located
near those planes are extracted to virtual 2D scans.
For the virtual 2D scan for the x-z-plane, we com-
pute S
r
(see (3)) as follows:
p is a 3D point composed of the coordinate-tuple
(p
x
, p
y
, p
z
), and d is a distance threshold.
For each horizontal row in S look for the closest points
p
0
and p
00
to the x-z-plane, having p
0
x
>= 0, and
p
00
x
< 0 respectively. If p
0
y
is lower than d, S
r
= S
r
∪ p
0
.
If p
00
y
is lower than d, S
r
= S
r
∪ p
00
.
Equation 4 has to be modified to
g : (x,y, z) → (x, z), x,y, z ∈ R. (13)
Finally, only rotation around x-axis is left that
needs to be calculated by the virtual 2D scan for the
y-z-plane (see section 4.2). The subset S
r
of the last
virtual 2D scan is calculated similar to above with re-
spect to the y-z- instead of the x-z-plane.
Unfortunately, the virtual 2D scans for the x-z-
and the y-z-plane are sensitive to dynamic objects lo-
cated in a distance closer than d to the x-z-plane, and
y-z-plane respectively. A possible solution could be
virtual 2D scans similar to that of the x-y-plane. This
is subject of current research, as well as other imple-
mentations of the virtual 2D scans capable of dealing
with outdoor environments.
5 EXPERIMENTAL RESULTS
This section shows the experimental results of our ap-
proach under real time constraints. At first, we will in-
troduce the experimental setup, while the qualitative
and computational results of two experiments will be
presented in subsections 5.2, 5.3, and 5.4. This sec-
tion closes with an evaluation of two series of experi-
ments registering range images with simulated error.
5.1 Experimental Setup
The 3D range images were taken by a rotating 3D
laser scanner based on SICK’s LMS291. An intro-
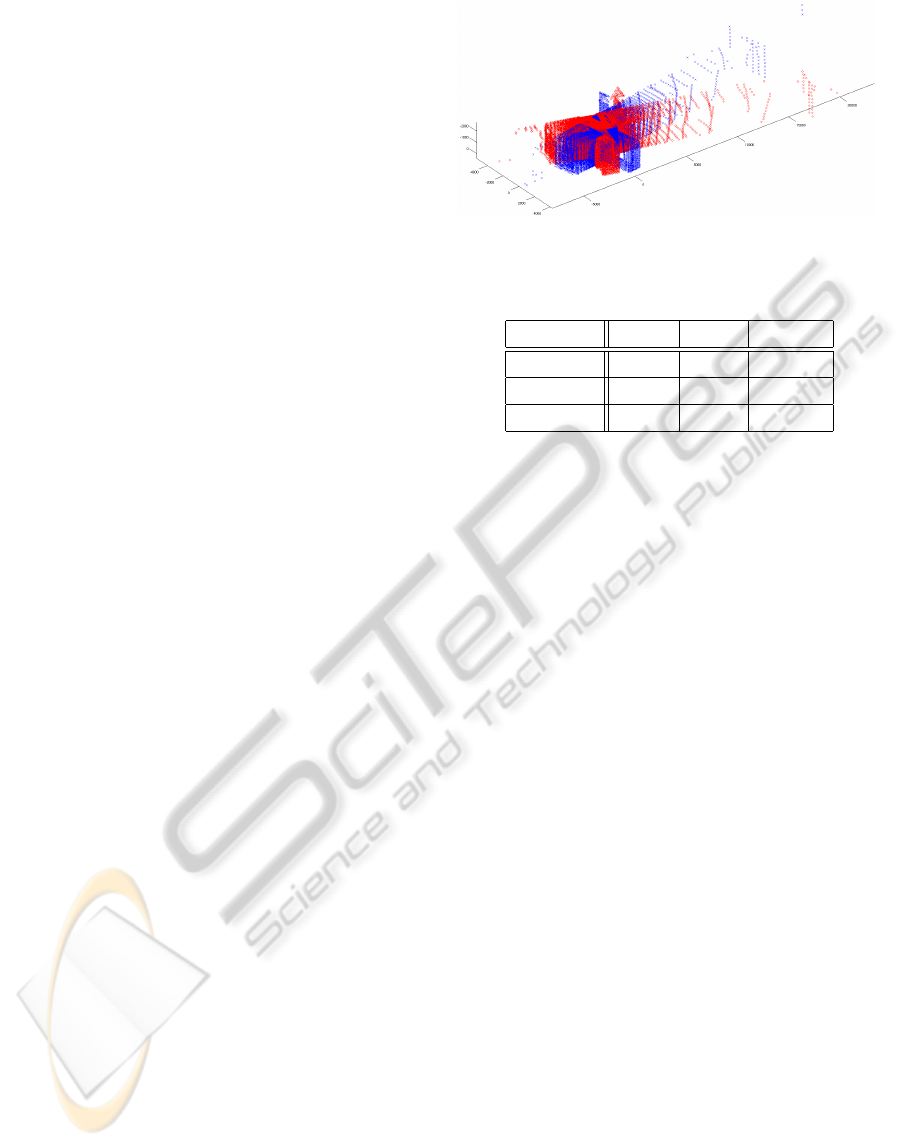
Figure 1: Model 3D scan (blue crosses), data 3D scan (red
diamonds), not registered.
Table 1: Results of first experiment.
Unreg ICP RegVirt
e(R,t) 29752 3369 3325
N 20483 25877 25870
Time [ms] - 74050 67
duction to the scanning device is given in (Wulf et al.,
2007). Several 3D scans were taken from different
positions on a typical office floor with offices and
doors on both sides.
For registering two 3D point clouds we used an
embedded PC running our robotic framework RACK
on a real time linux operating system. For comparison
of the algorithms we used an accelerated ICP imple-
mentation, proposed e. g. in (N
¨
uchter et al., 2007),
as described in section 2. We conducted our tests by
executing both algorithms with identical input data.
5.2 Qualitative Results
The scans we picked for the first evaluation consist of
25858 and 25987 raw 3D points respectively. Both
scans in their local coordinate systems are shown in
Figure 1. When executing our registration algorithm
using virtual 2D scans, three 2D registration steps
have to be performed. After 25 iterations of the 2D
ICP, the scans were registered successfully in the first
step (x-y-plane). The second and third registration
steps took 14 and 4 iterations respectively.
For qualitative comparison of our new approach
and the 3D ICP we calculated the error function
e(R,t) according to (1) before and after full 3D regis-
tration. Table 1 shows the results of the error function
and the number of points N according to (2) taken
into account for its calculation. The translation error
between the results of both algorithms is 22 mm.
As can be seen, there are no qualitative differences
worth mentioning. The error function reaches a sim-
ilar value, as well as the number of points taken into
account for calculating the error function. This leads
to the result that our new approach reaches a similar
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
330
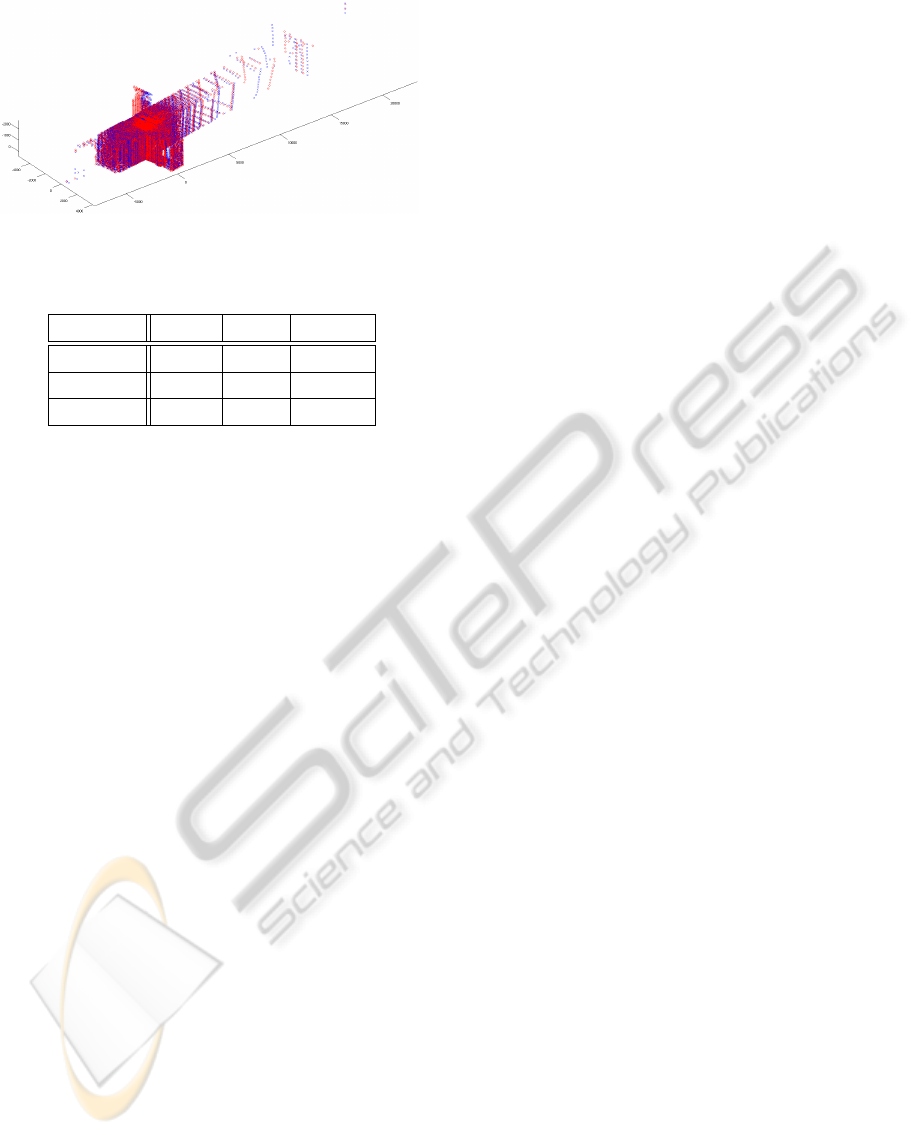
Figure 2: Model 3D scan (blue crosses), data 3D scan (red
diamonds), registered.
Table 2: Results of second experiment.
Unreg ICP RegVirt
e(R,t) 33908 5048 6376
N 23564 26131 26157
Time [ms] - 36950 94
quality to a conventional ICP algorithm when regis-
tering two indoor 3D range images with small transla-
tion in z-direction and rotation around x- and y-axes.
Figure 2 shows both 3D point clouds registered
into the model coordinate system by our new registra-
tion approach.
5.3 Non-zero Pitch and Roll Angles
To evaluate how well our approach copes with sig-
nificantly non-zero pitch and roll angles, we tilted
our experimental platform for appr. 4 cm to the top
while taking the 3D data point set. Together with the
yaw motion, this results in non-zero pitch and roll an-
gles with reference to the coordinate system of the
3D model point set. Figure 3a shows the unregistered
point clouds. The scans consist of 26088 and 26311
raw 3D points respectively. The remaining setup is
the same as presented in section 5.1.
Table 2 shows the results of the error function and
the number of points N according to (2) taken into ac-
count for its calculation. Computing the registration
took 24, 18, and 9 iterations respectively with our new
approach. The translation error between both results
is 62 mm. Using a gyrometer on a moving platform
could increase accuracy, i.e. decreasing the slight dif-
ference in the error function resulting from the coarse
alignment before the registration. However, the mi-
nor difference in the quality can be neglected when
achieving real-time computing capabilities in return,
as presented in the next subsection.
Figure 3b shows both 3D point clouds registered
into the model coordinate system by our new registra-
tion approach.
5.4 Computational Requirements
Because of the reduction from 3D to 2D ICP algo-
rithm, our new approach needs much less computa-
tional effort for registering the 3D range images. As
can be seen in Table 1, the calculation time reduces
from appr. 74 seconds in the case of full 3D ICP to
67 milliseconds in the case of our new approach. In
the second experiment, the reduction is from appr. 37
seconds to 94 milliseconds (see Table 2). When a full
3D scan takes 1.2 seconds as in our case (Wulf et al.,
2007), our algorithm is capable of registering subse-
quent taken 3D range images online, i.e. in real time.
5.5 Simulated Error
Finally, we evaluated two series of registration with
simulated errors. Therefore, we transformed the
model 3D scan of Figure 3a and registered it to the
untransformed model scan. In a first series, we trans-
lated the scan in each direction, ranging from -30 cm
to +30 cm, and taking incremental steps of 10 cm.
This resulted in a series of 343 registrations for both
algorithms. Surprisingly, our new approach had a
mean translation error of 0.38 mm, compared to 0.49
mm using the ICP algorithm. The computation time
was 25 ms (min. 17 ms, max. 31 ms) in average,
compared to 19.7 s (min. 253 ms, max. 42.5 s).
In a second series, we rotated the scan around all
axes, ranging from -10
◦
to +10
◦
each. The applied
increment was 5
◦
, resulting in a total of 125 registra-
tions. The mean rotation error of our new approach
was 0.86
◦
compared to 0.01
◦
in case of ICP. The av-
erage computation times were 55 ms (min. 16 ms,
max. 113 ms), and 30.3 s (min. 254 ms, max. 56.6 s).
Examining these two experimental series with
simulated errors, the computation times compared to
the ICP algorithm were convincing again. The trans-
lation error with our new approach was even lower
than with ICP. In case of rotation we evaluated a
higher rotation error using our approach, but we are
confident to gain an improvement with further re-
search regarding the algorithm (see section 4.2).
6 CONCLUSIONS AND FUTURE
WORK
This paper presents an approach for registering indoor
3D range images in real time. In our experiments, it
registers two 3D point clouds up to 1100 times faster
than the well-known ICP algorithm. This is done by
splitting the full 6DoF transformation into three trans-
formations. Each single transformation is calculated
REGISTRATION OF INDOOR 3D RANGE IMAGES USING VIRTUAL 2D SCANS
331
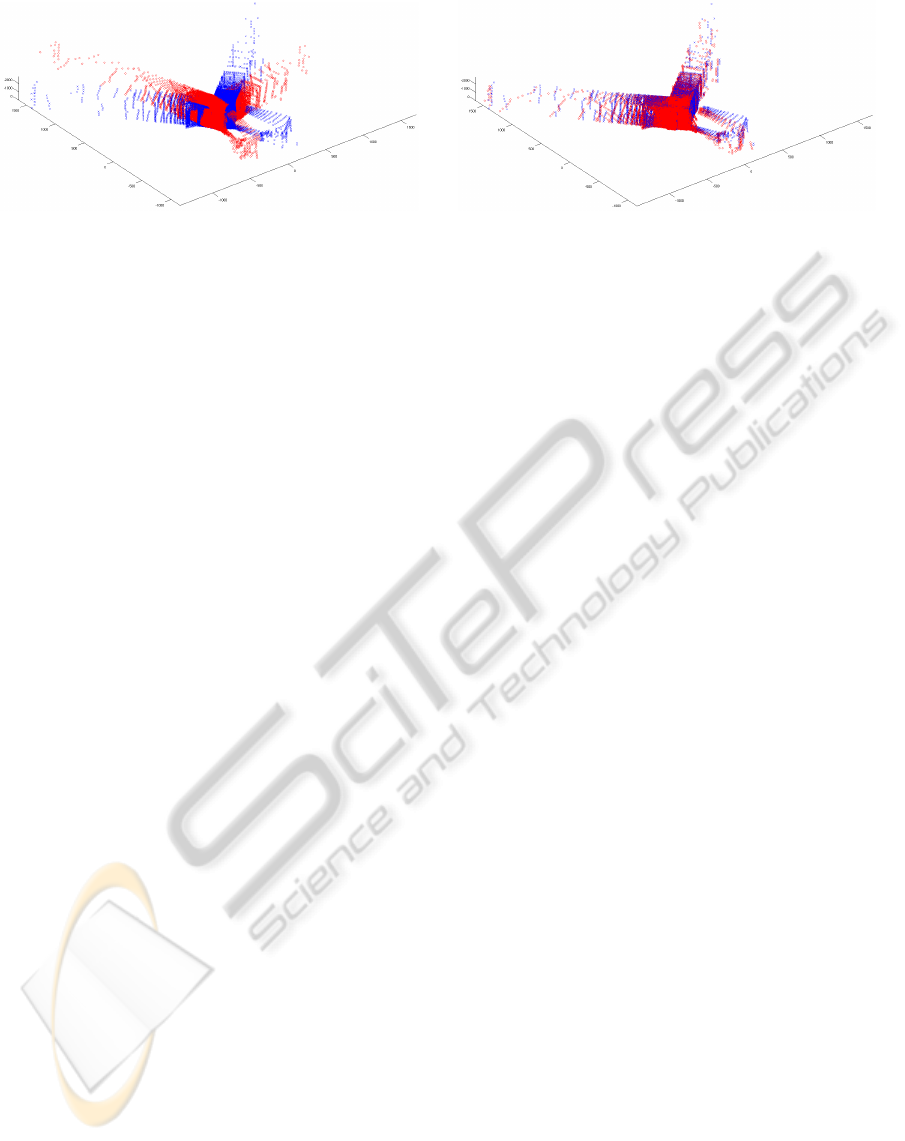
(a) Unregistered 3D scans. (b) Registered 3D scans.
Figure 3: Registration of 3D scans with non-zero roll, pitch, and yaw angles.
by a 2D ICP algorithm with orthogonal virtual 2D
scans, utilizing the typical structure of indoor envi-
ronments. Due to the use of virtual 2D scans, the al-
gorithm can cope with dynamic objects (with small
restictions) as well as with non-rectangular environ-
ments. The resulting registration leads to a similar
quality to the full 3D ICP algorithm.
Limitations and therefore future research work
have been identified in sections 4.2 and 4.3. Never-
theless, our experiments showed promising results. A
comparison to other approaches like techniques based
on the extraction of planes out of the 3D range images
and matching them will be necessary to stress the ad-
vantages of our algorithm. Further future work will
deal with the implementation and evaluation of a full
SLAM cycle based on the registration of 3D range
images using virtual 2D scans.
REFERENCES
Arun, K. S., Huang, T. S., and Blostein, S. D. (1987). Least-
squares fitting of two 3-D point sets. IEEE Trans. Pat-
tern Anal. Mach. Intell., 9(5):698–700.
Bentley, J. L. (1975). Multidimensional binary search
trees used for associative searching. Commun. ACM,
18(9):509–517.
Besl, P. and McKay, H. (1992). A method for registration
of 3-D shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Chen, Y. and Medioni, G. (1991). Object modeling by reg-
istration of multiple range images. In Proc. IEEE In-
ternational Conference on Robotics and Automation
ICRA 1991, pages 2724–2729 vol.3.
Jez, O. (2008). 3D mapping and localization using lev-
eled map accelerated ICP. In Bruyninckx, H., Preucil,
L., and Kulich, M., editors, EUROS, volume 44 of
Springer Tracts in Advanced Robotics, pages 343–
353. Springer.
Magnusson, M., N
¨
uchter, A., Lorken, C., Lilienthal, A., and
Hertzberg, J. (2009). Evaluation of 3d registration re-
liability and speed - a comparison of icp and ndt. In
Proc. IEEE International Conference on Robotics and
Automation ICRA 2009, pages 3907–3912.
Nguyen, V., Harati, A., and Siegwart, R. (2007). A
lightweight SLAM algorithm using orthogonal planes
for indoor mobile robotics. In Proc. IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems IROS 2007, pages 658–663.
N
¨
uchter, A., Lingemann, K., and Hertzberg, J. (2005).
Mapping of rescue environments with Kurt3D. In
Proc. IEEE International Safety, Security and Rescue
Robotics, Workshop, pages 158–163.
N
¨
uchter, A., Lingemann, K., Hertzberg, J., and Surmann,
H. (2007). 6D SLAM - 3D mapping outdoor environ-
ments. J. Field Robot., 24(8-9):699–722.
Thrun, S. (2003). Robotic mapping: a survey, pages 1–
35. Morgan Kaufmann Publishers Inc., San Francisco,
CA, USA.
Wulf, O. (2008). Virtuelle 2D-Scans - Ein Verfahren zur
echtzeitf
¨
ahigen Roboternavigation mit dreidimension-
alen Umgebungsdaten. PhD thesis, Leibniz Univer-
sit
¨
at Hannover, Hannover, Germany.
Wulf, O., Arras, K., Christensen, H., and Wagner, B.
(2004). 2D mapping of cluttered indoor environments
by means of 3D perception. In Proc. IEEE Interna-
tional Conference on Robotics and Automation ICRA
2004, volume 4, pages 4204–4209 Vol.4.
Wulf, O., N
¨
uchter, A., Hertzberg, J., and Wagner, B. (2007).
Ground truth evaluation of large urban 6D SLAM. In
Proc. IEEE/RSJ International Conference on Intelli-
gent Robots and Systems IROS 2007, pages 650–657.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
332
