
LASER BASED TELEROBOTIC CONTROL FOR ASSISTING
PERSONS WITH DISABILITIES PERFORM ACTIVITIES OF
DAILY LIVING
Karan Khokar, Redwan Alqasemi and Rajiv Dubey
Department of Mechanical Engineering, University of South Florida, 4202 E. Fowler Ave., Tampa, Florida, U.S.A.
Keywords: Telerobotics, Rehabilitation Robotics, Human-Machine Interaction.
Abstract: In this paper we demonstrate an innovative use of range information from a laser sensor mounted on the
end- effector of a remote robot manipulator to assist persons with disabilities carry out ADL (Activities of
Daily Living) tasks in unstructured environments. Laser range data is used to determine goals, identify
targets and via points to enable autonomous execution of trajectories. The human operator performs
minimal teleoperation and is primarily involved in higher level decision making. We hypothesize that laser
based assistance improves task performance in terms of time and accuracy and also reduces the cognitive
load on the user executing the task. Tests on ten healthy human subjects in executing a remote manipulation
task conform the hypothesis.
1 INTRODUCTION
Robotic devices have thus been used to enable
physically disabled individuals to execute ADL
tasks (Bolmsjo, Neveryd and Eftring, 1995).
However, teleoperation of a remote manipulator puts
a lot of cognitive load on the operator (Bolmsjo et
al., 1995). Our previous work at the Rehabilitation
Robotics Laboratory at University of South Florida
has focused on augmenting the performance of
motion-impaired users in job-related tasks using
scaled teleoperation and haptics (Pernalete, Yu,
Dubey and Moreno, 2002) and assistance based on
real-time environmental information and user
intention (Yu, Alqasemi ,Dubey and Pernalete,
2005). In this work the laser data is used to
determine goal points, identify targets and via points
in unstructured environments that enables
autonomous execution of certain sub tasks under
human supervisory control thus providing assistance
to the human. The human is still in the loop to make
high level decisions like pointing the laser to critical
points in the remote environment by teleoperating
the arm.
Hasegawa, Suehiro and Takase (1991) made use
of the laser range information to compute and record
3D co-ordinates of points on objects in the
environment, to enable autonomous task execution.
Takahashi and Yashige (2000) presented a simple
and easy to use laser based robot positioning system
to assist the elderly in doing daily pick-and-place
activities. Nguyen, Anderson, Trevor, Jain, Xu and
Kemp (2008) made use of an arrangement consisting
of a laser pointer, a monochrome camera, a color
filter and a stereo camera pair to estimate the 3D co-
ordinates of a point in the environment and thereby
fetch objects in the environment designated with the
laser pointer.
2 LASER ASSISTED CONTROL
We have used PUMA560 as the remote manipulator
and Phantom Omni haptic device as the master. The
human user by means of teleoperation points the
laser to critical points in the environment. These
critical points could be goal points, objects or planar
surfaces of interest. The laser sensor is mounted on
the end-effector of PUMA and has the same
orientation as the end-effector. The laser beam
direction thus will always be parallel to the z axis of
the end-effector.
2.1 Laser Assisted Target Position
Determination and Autonomous
Trajectory Execution
The user points the laser to a specific target and
446
Khokar K., Alqasemi R. and Dubey R. (2010).
LASER BASED TELEROBOTIC CONTROL FOR ASSISTING PERSONS WITH DISABILITIES PERFORM ACTIVITIES OF DAILY LIVING.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 446-449
DOI: 10.5220/0003004804460449
Copyright
c
SciTePress

locks the target by ceasing to teleoperate. Then as
the user commands by pressing a keyboard key, the
machine generates a linear trajectory from the
current PUMA end effector location to the target
point determined by the laser and also executes the
trajectory.
For generating a linear trajectory, the initial
and final transformation matrices are required. The
initial point transformation matrix is determined
from PUMA forward kinematics and that for the
final point is determined using laser range data and
(1) (ref Fig. 1).
L
O
E
L
B
E
B
O
TTTT **=
(1)
2.2 Laser Assisted Autonomous
Surface Alignment
For certain ADL tasks determination of orientation
of the planar surface associated with the target is
necessary to orient the end-effector in such a way
that it is aligned with the perpendicular to the
surface. This alignment has been implemented as an
autonomous function using laser data and it helps
the user to manipulate a target from a convenient
angle in teleoperation.
Figure 1: Autonomous trajectory generation concept.
The user points the laser to three distinct points
on the planar surface to record their co-ordinates.
When the user activates autonomous alignment
algorithm, the transformation matrix required for
end-effector alignment is computed online and the
end-effector aligns with the surface. The z-
component of the rotation component of the
transformation matrix is the same as the unit vector
along normal to the surface which is computed by
the cross product of the vectors connecting the three
points P1, P2 and P3. The x and y-components are
then obtained using the right-hand rule.
3 APPLICATION OF LASER
BASED CONCEPT IN TASK
EXECUTION
Fig. 2 shows the sequence of steps in executing a
pick and place task using laser assistance. The user
starts with locating the destination point by pointing
the laser in teleoperation and commanding the
system to record the co-ordinates of that point (Fig.
2(a)). Next the user identifies three random points on
the planar surface with the laser (Fig. 2(b)). After
this the user locates the target object with the laser
and commands the execution of the autonomous
trajectory (Fig. 2(c)). When the arm stops near the
target (Fig. 2(d)) the user commands autonomous
alignment with the planar surface (Fig. 2(e)). Now
as the arm is in a convenient configuration for
grasping the user makes fine adjustment in
teleoperation to locate the gripper exactly over the
target to grasp it.
Next the user commands the system to
autonomously execute a path from the current
location to the destination point while avoiding the
obstacle. The path is executed in three linear
segments. , the first being from the current PUMA
location to a point vertically above it so that the arm
is clear of the tallest obstacle (Fig. 2(e) and 2(f)), the
second being in the horizontal plane from this point
to a point vertically above the destination (Fig. 2(f)
and 2(g)) and the third is to a point just above the
destination (Fig. 2(g) and 2(h)). The initial and final
transformation matrices for each segment are
computed by the system from forward kinematics,
the heeight of the tallest obstacle and the destination
point coordinates. The height of the tallest obstacle
is determined by pointing the laser to the top of the
obstacle and recording the co-ordinates.
After the arm has traversed the path, the user makes
fine movements to precisely locate the target over
the destination by teleoperation and places the
target. Thus we see that the human is only a
supervisor and is involved in minimum
teleoperation. The trajectories and generated online
and executed autonomously. Moreover the interface
consisting of pointing with laser and pressing
LASER BASED TELEROBOTIC CONTROL FOR ASSISTING PERSONS WITH DISABILITIES PERFORM
ACTIVITIES OF DAILY LIVING
447

(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 2: Laser based features in pick and place task execution: (a) Pointing to destination point for path planning (b)
Pointing to platform points for planar surface orientation determination (c) Pointing to target (cup) for autonomous
trajectory generation (d) End of autonomous trajectory (e) Autonomous end-effector alignment (f) Autonomous path – end
of first segment (g) Autonomous path – end of second segment (h) Autonomous path – end of third segment.
keyboard keys is simple to use. This way we aim at
relieving the human from much cognitive load in
task execution. The destination point, target and
surface could be located anywhere in the
environment and thus the method can be used for
manipulating in unstructured environments.
4 TESTS AND RESULTS
The test bed consists of PUMA and Omni
manipulators (Fig. 3). A SICK DT60 laser range
finder and a Logitech MT Orbit CCD Camera were
mounted on the PUMA end effector.
For testing, 10 healthy subjects were asked to
perform a pick and place task thrice in each of the
two modes, one is the unassisted teleoperation mode
and the other is the laser assisted mode. For each run
the time taken to complete the task, the end effector
Cartesian co-ordinates and the user experience were
recorded. Before starting the tests the subjects were
given sufficient time to acclimatize with the system.
In general each subject was given 5 to 6 trials before
testing.
Figure 3: Test bed of PUMA and Omni manipulators.
The experimental set up is shown in Fig. 4. The
cup is the target which is to be picked up from the
location shown, and placed on the orange sticky
shown to the left. The folder simulates an obstacle.
The task here is to command the arm from a ‘ready’
position towards the target, grasp the target and
place it over the destination point while avoiding the
obstacle.
Figure 4: Experimental set-up for pick and place task.
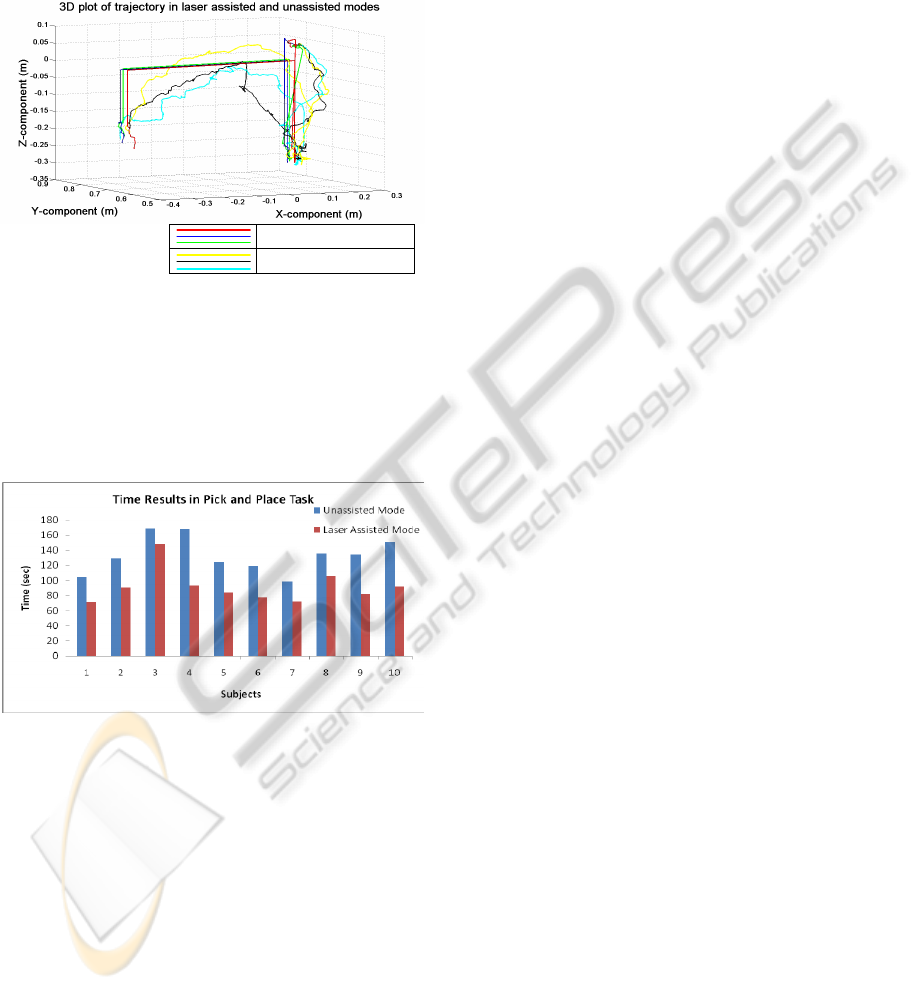
The task performance is compared between the two
modes in terms of accuracy and time. Accuracy is
presented in the form of the path traversed by the
end effector in the two modes.. Plot for only one
subject is shown in Fig. 5. We observe that the
motion generated by laser assisted mode was,
continuous and accurate. On the other hand the
motion in the unassisted mode was discontinuous
and the arm often deviated from the path. The
subjects had tremendous difficulties in teleoperating
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
448
the PUMA without any assistance. The loops around
the pick-up point are due to subjects repeatedly
trying to orient the gripper properly so that it is in a
convenient configuration for grasping. Orienting the
arm properly was one of the most challenging
activities the subjects faced.
Laser Assisted Modes
Unassisted Modes
Figure 5: Accuracy in path traversal for laser assisted and
unassisted modes.
The average time per subject per mode was
computed and is presented in the form of plots in
Fig. 6. We observe that each subject spent more time
to complete the task in the unassisted mode than in
the laser assisted mode.
Figure 6: Time plots in executing pick and place task.
The user experience in executing the task in the
two modes was also noted. The users preferred the
laser assisted mode as generating task plans by
picking up points with the laser was easier for them
and the robot executed the task. In teleoperating
without assistance they experienced a lot of mental
load.
5 CONCLUSIONS
Our hypothesis that the laser assisted telerobotic
control methodology of task execution would
improve the task performance and reduce the mental
load on the users has been validated by tests on
healthy subjects on a pick and place task. The task
performance in terms of time and accuracy improved
and the subjects were overwhelmingly in favour of
using the laser assisted mode in executing the task as
they experienced less cognitive load. With the
results obtained we believe that this telerobotic
system would make it possible for persons with
disabilities to execute ADL tasks with much greater
ease. Next we intend to test the method on persons
with disabilities and for a variety of ADLs.
REFERENCES
Bolmsjo, G., Neveryd, H., Eftring, H. (1995). Robotics in
Rehabilitation. IEEE Transactions on Rehabilitation
Engineering. 3(1), 77 -83.Hasegawa, T., Suehiro, T.
and Takase, K. (1991). A Robot System for
Unstructured Environments Based on an Environment
Model and Manipulation Skills. IEEE International
Conference on Robotics and Automation (Vol. 1, pp.
916-923).
Nguyen, H., Anderson, C., Trevor, A., Jain, A., Xu, Z. and
Kemp, C. (2008). El-E: An Assistive Robot that
Fetches Objects from Flat Surfaces. The Robotic
Helpers Workshop at HRI.
Pernalete, N., Yu, W., Dubey, R. and Moreno, W. (2002).
Development of a Robotic Haptic Interface to Assist
the Performance of Vocational Tasks by People with
Disability. IEEE International Conference on Robotics
and Automation. (Vol. 2, pp. 1269-1274).
Takahashi, Y. and Yashige, M. (2000). Robotic
manipulator operated by human interface with
positioning control using laser pointer. IEEE 26th
Annual Conference of the Industrial Electronics
Society (Vol. 1, pp. 608-613).
Tarn, T., Xi, N. and Guo, C. (1996). Task-Oriented
Human and Machine Co-Operation in Telerobotic
Systems. Annual Reviews in Control. (Vol. 20, pp.
173-178).
Yu, W., Alqasemi , R., Dubey, R. and Pernalete, N.
(2005). Telemanipulation Assistance based on Motion
Intention Recognition. IEEE International Conference
on Robotics and Automation. (pp. 1121-1126).
LASER BASED TELEROBOTIC CONTROL FOR ASSISTING PERSONS WITH DISABILITIES PERFORM
ACTIVITIES OF DAILY LIVING
449
