
WHEELED-ROBOT NAVIGATION WITH VELOCITY
UPDATING ON ROUGH TERRAINS
Farid García and Matías Alvarado
Centro de Investigación y de Estudios Avanzados-IPN, Departamento de Computación
Av. Instituto Politécnico Nacional 2508, San Pedro Zacatenco, CP 07360, México DF, México
Keywords: Autonomous Navigation, Roughness Recognition, Velocity Updating, Wheeled-Robots.
Abstract: For navigation on outdoor surfaces, usually having different kind of roughness and soft irregularities, this
paper proposal is that a wheeled robot combines the gradient method for path planning, alongside it adjusts
velocity based on a multi-layer fuzzy neural network; the network integrates information about the
roughness and the soft slopes of the terrain to compute the navigation velocity. The implementation is
simple and computationally low-cost. The experimental tests show the advantage in the performance of the
robot by varying the velocity depending on the terrain features.
1 INTRODUCTION
Robotic autonomous navigation throughout outdoor
terrains is highly complex. Obstacle detection and
avoidance for no collision as well as the terrain
features information for no slides are both required.
Environment data must be quick and accurately
processed by the robot’s navigation systems for a
right displacing. Besides, when information from
human remote controllers is not quick available, the
autonomous robots should be equipped for
convenient reactions, particularly in front of
unpredicted circumstances. Actually, by moving on
outdoors, the autonomous robot’s velocity control
regarding the terrain features, beyond the obstacle
location and avoidance, it has been few attended and
it is a weakness for efficient and safe navigation
nowadays.
For wheeled-robots navigation on terrains, it is
necessary data about the surface features such that
automated safe navigation is ensured. The feature
which this work focuses is the surface roughness
where the robot moves on. The robot’s velocity
during real navigation depends on the terrain
roughness.
Outdoor autonomous robots are particularly
relevant employed for terrain exploration missions.
The terrain difficulties of soon system planets –like
Mars– to move through soil, rocks and slopes,
requires the usage of robots with the highest degree
of autonomy to overcome such difficulties. In Earth
exploration missions where human lives may be in
dangerous circumstances, the autonomous robots are
as well required. For instance, search of explosive
minas, active volcano craters exploration to
determine the eruption risk.
Kelly and Stentz (1998) propose a navigation
system for outdoors robots which includes
perception, mapping and obstacle avoidance.
Regarding the environment perception, Lambert et
al. (2008) introduces a probabilistic modelling useful
to avoid or to mitigate eventual collisions, which is
used for updating a robot braking action. Selekwa et
al. (2008) and Ward & Zelinsky (2000) addressed
the navigation and path planning of an autonomous
robot which varies the velocity according to the
proximity of obstacles detected by infrared sensors.
So far, all the referred works on outdoor
autonomous robots do not include in their proposals
information about terrain surface roughness during
navigation. In this work, two algorithms are
implemented for robot autonomous navigation, one
for path planning and the other for velocity updating
regarding the terrains features. The present proposal
is tested with a small wheeled-robot moving over
outdoors terrains containing grass, ground, garden
sand and soil, as the ones in
Figure 1 and Figure 2. It
is assumed that the robot can move on slopes with
inclination angles less than 15 degrees; otherwise,
the slopes are considered as obstacles, thus, the
robot wraps them, in order to overcome them.
277
Garc
´
ıa F. and Alvarado M. (2010).
WHEELED-ROBOT NAVIGATION WITH VELOCITY UPDATING ON ROUGH TERRAINS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 277-284
Copyright
c
SciTePress

Figure 1: Robot’s navigation outdoor surface.
Figure 2: Test environment.
Surface textures are captured via artificial vision,
after image processing the estimation of the terrain
roughness as well as the slopes inclinations are
gotten. Then, the algorithms output indicates the
velocity the robot can achieve. Bright and uniform
lighting during navigation is required to guaranty
consistent roughness recognition; therefore the
presence of shadows, which treatment is a hard task
to pattern recognition (Kahraman and Stegmann,
2006), is out of the scope of this work.
During outdoors navigation, human drivers
estimate the convenient vehicle velocity by
regarding their previous experience when driving on
similar terrain textures. In other words, humans
estimate how rough, in average, the terrain is,
instead if specific texture details are recognized.
Human drivers that navigate on uneven terrains
do not need to know about specific details but on the
textures appearance average. The average
recognition of ranges of textures as the humans learn
is the behave experience to be mimicked and
implemented to strength the robots’ navigation
abilities. The algorithms for path planning differ
depending on the type of application, exploration on
unknown terrains (Seraji and Howard, 2002), car
navigation on roads (Sun et al., 2006), planet
exploration (Seraji and Werger, 2007) or indoor
navigation (Ward and Zelinsky, 2000), or if the
environment is either dynamic (Kim et al., 2007) or
static (Wang and Liu, 2005).
For our purpose, the robot moves on the
calculated path by adjusting its velocity depending
on the terrain features. The path planning algorithm
called gradient method, in static environments,
recalculates the path in real time whenever an
obstacle is found (Konolige, 2000). The gradient
method is integrated for our navigation proposal.
The rest of the article is organized as follows:
Section 2 summarizes the closest antecedents in the
field of autonomous navigation; then, the method
and architecture of the fuzzy neural network for
speed updating, together with the gradient method
for path planning are introduced. Section 3 describes
the integration of both algorithms for wheeled-robot
navigation, together with the tests and experimental
results. Discussion in Section 4, then the paper ends
with conclusions in Section 5.
2 VELOCITY UPDATING BY
FUZZY NEURAL NETWORK
2.1 Terrain Roughness Recognition
The classification of terrain roughness has almost no
received attention, and just recently is being a bit
more attended. For instance, Larson et al. (2005)
analysis the terrain roughness by means of spatial
discrimination which then is (meta-) classified.
Seraji and Howard (2002) assess the navigation
strategy with the terrain’s features of roughness,
slopes and discontinuity. Ishigami et al. (2007)
generate a path over a rough terrain with a terrain-
based criterion function, and then the robot is
controlled so as to move on the chosen path. In
Brooks and Iagnemma (2009) do roughness
recognition by using artificial vision, so recognition
of novel textures is later to off-line recognition
training from sample texture. Pereira et al. (2009)
plotted maps of terrains incorporating roughness
information that is based on the measurement of
vibrations occurring in the suspension of the vehicle;
this online method can recognize textures at the
moment the vehicle passes over them, what is a
limitation for velocity updating.
For velocity updating according to the terrain
features, our proposal sets to imitate as human
beings do. For safe navigation on irregular terrains,
the human’s velocity estimation is via imprecise but
enough surface texture recognition. When a human
driver notes a new texture, he uses his experience to
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
278

Figure 3: The proposal diagram.
estimate how rough the texture is, and then he
decides the car driving speed without slide risks.
As illustrated in the diagram of Figure 3, in the
first step, the terrain’s textures are neural-net-
clustered in a roughness meta-class: a Supervised
Neural Network (SNN) classifies textures forming
the meta-class; then, a Fuzzy Neural Network (FNN)
extends the supervised one, matches each terrain
roughness with the corresponding robot velocity
meanwhile the robot navigates safely.
Slopes are detected by two infrared sensors. One
infrared sensor is located in the frontal part of the
robot does parallel ray projection to the robot’s
motion; the other sensor projects its ray directly to
the floor perpendicular to the first sensor. The
inclination angle of slopes is computed by
trigonometric operations.
The off-line and on-line steps to adapt velocity
regarding the terrains roughness and the inclination
slopes while navigating are next described:
Roughness Identification (Off-line Training)
1) Select representative images of the terrain
textures, where the robot moves on.
2) Characterize the texture using the
Appearance Based Vision method which
computes the principal components of the
images distribution.
3) Train the SNN with the texture-roughness
relationship previously established by the
human expert driver.
4) Train the FNN to determine the velocity
regarding the texture roughness as well as the
inclination angle of slopes, according to an
expert driver’s directives, make the fuzzy sets
and the inferece IF-THEN rules system.
Velocity Updating and Robot’s Motion (On-line
Steps)
5) Acquisition of terrain images with the robot’s
camera.
6) The SNN classifies the texture and assigns its
roughness, this data is forwarded to the FNN.
7) The FNN inputs are both, the texture
roughness and the slope inclination angle (to
determine if the robot can pass on the slope,
or should move around it).
8) With the texture roughness and slope
inclination data, the FNN updates the
velocity. The robot’s mechanical control
system adjust the velocity.
9) The cycle is repeated as the robot moves, and
the velocity is cycle updated.
2.2 The Fuzzy Neural Network
This section introduces the five-layer fuzzy neural
network, whose output sets the velocity the robot
can achieve safely. The terrain features recognition
followed by the robot velocity tuning is shown in
Figure 4. The roughness and slope input data are
assessed and then used to adjust the robot’s velocity,
that is the FNN output data, see Table 1. The FNN
first layer inputs are the slope size and the texture
roughness, the second layer sets the terms of input
membership variables, the third sets the terms of the
rule base, the fourth sets the term of output
membership variables, and in the fifth one, the
output is the robot’s velocity. The textures
roughness is classified in three fuzzy sets, High (H),
Medium (M) and Low (L). The inclination angles of
slopes are classified in six fuzzy sets: Plain (Pl),
Slightly Plain (SP), Slightly Sloped (SS), Moderato
Sloped (MS), High Slope (HS) and Very High (VH).
The FNN output values are either: High Velocity
(HV), Moderate Velocity (MV), Low Velocity (LW)
or Stop (ST). Membership functions of the input and
output variables terms denote the corresponding
texture roughness, slope inclination and velocity,
respectively.
Figure 4: The Fuzzy Neural Network.
The fuzzy-making procedure maps the crisp
input values to the linguistic fuzzy terms with
membership values in [0,1]. In this work the
trapezoid membership functions (MF) for texture
WHEELED-ROBOT NAVIGATION WITH VELOCITY UPDATING ON ROUGH TERRAINS
279

variable and the triangle MF for angle variable are
respectively used. The FL inference rules governing
the input - output relationship are in the Table 1.
Taking X, Y, Z as variables of the respective
predicates, the form of inference rules is:
IF Slope angle is X AND Roughness is Y THEN
Velocity is Z.
The de-fuzzy procedure maps the fuzzy output
from the inference mechanism to a crisp signal.
When the robot finds a slope steeper than the
allowed threshold, it stops, and evaluates which
movement to make, whose decision concerns to path
planning. The gradient method (Konolige, 2000) is
integrated to present proposal.
2.3 The Gradient Method for Path
Planning
The gradient method requires a discrete
configuration of the navigation space in which the
path cost function is sampled. At each point of the
workspace, the gradient method uses a navigation
function to generate a gradient field that represents
the optimum path to the target point. The gradient of
navigation function indicates the path direction with
lowest cost, at each point in the navigation space;
this optimum path to the target is continuously
calculated, and is determined based on the length
and the proximity to obstacles, in addition to any
other criteria that may be chosen. By itself, the
gradient method can lead the path with the lowest
cost in static and completely unknown
environments; this method is efficient for real time
monitoring the movements of mobile robots
equipped with laser beams.
3 THE NAVIGATION
ALGORITHM
The robot autonomous navigation requires the
concurrent operation of path planning and velocity
estimation algorithms. The first step is to create a
virtual map of the robot navigation space; hence the
surface is divided into squares for providing the
required detail level of space model. The next step is
to calculate the optimal path between initial and goal
locations using the gradient method.
After path planning, the texture recognition
algorithm is turned on to determine the robot
velocity. The roughness surface data in addition to
information from sensors that measure the slopes
Table 1: The velocity updating fuzzy rules.
Rule
No.
Input Output
Slope angle Roughness Velocity
1 Pl L HV
2 Pl M HV
3 Pl H HV
4 SP L MV
5 SP M HV
6 SP H HV
7 SS L MV
8 SS M MV
9 SS H HV
10 MS L LV
11 MS M MV
12 MS H MV
13 HS L LV
14 HS M LV
15 HS H MV
16 VH L ST
17 VH M ST
18 VH H LV
inclination are processed. Hence, the robot receives
the instruction to move at the estimated velocity in
the prior determined trajectory. If during the trip the
sensors detect an obstacle or slopes with inclination
greater than 15 degrees, the robot stops and the
velocity estimation algorithm is turned off; the
obstacle is registered and a new path to the goal
location is recalculated. After that, the velocity
estimation algorithm is turned on again, and the
robot learns to move in the new trajectory at the
estimated speed. Otherwise, i.e., if the robot does not
find an obstacle on its path, then its speed is
updated.
Note that the velocity estimation algorithm is not
being executed all the time, but it is turned off when
the robot finds an obstacle; at this circumstance, the
camera records the obstacle images instead of
surface texture. If the velocity estimation algorithm
would not be turned off, the velocity would be
estimated based on images of the obstacle texture,
what is wrong; furthermore, in front of obstacle the
robot should overcomes the obstacle with specific
movements and the velocity change is irrelevant.
The robot stops when it determines that has
reached the goal location. The robot computes its
location from the distance it has travelled since the
initial location, by using odometry. The following
list summarizes the robot navigation steps, see
Figure 5:
1. Create a virtual map of robot space
navigation, surface discretization,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
280
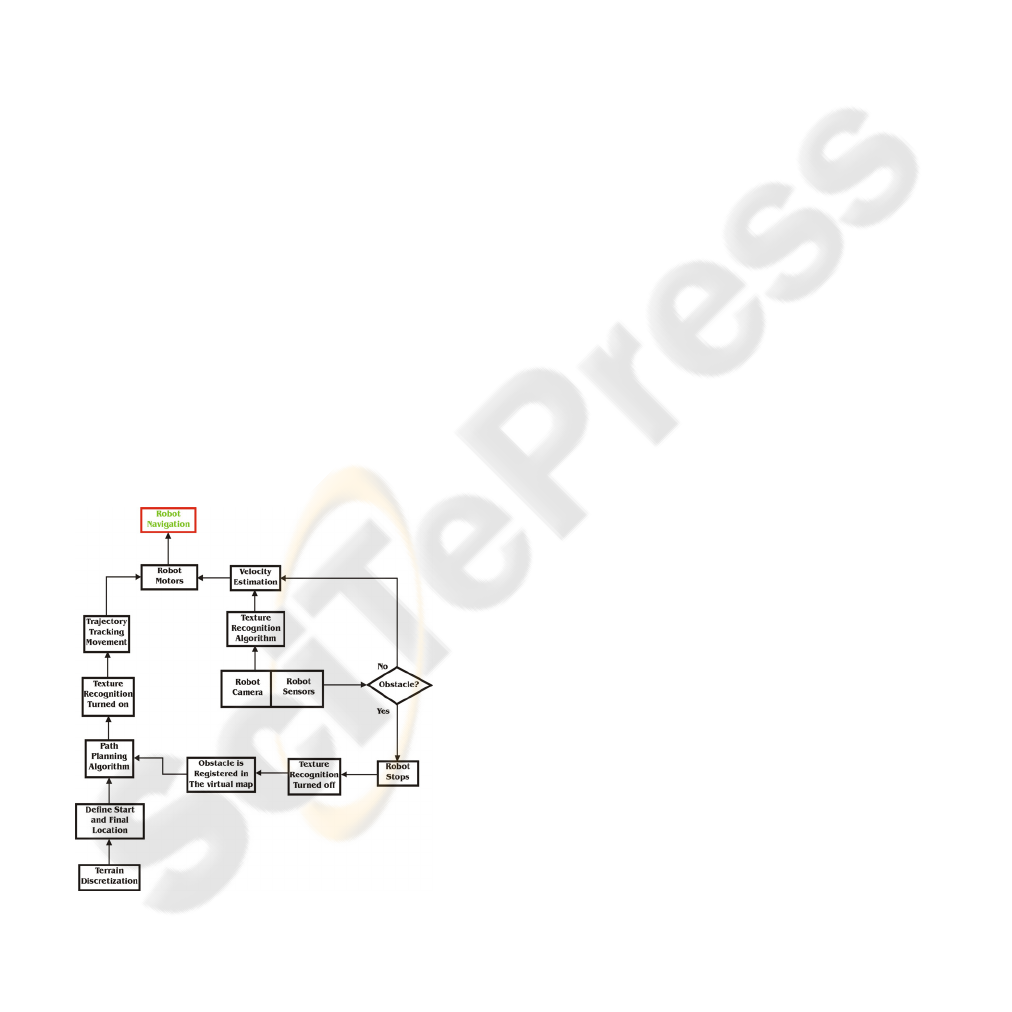
2. Define the initial and goal locations of the
robot,
3. Compute the path with the gradient method,
4. Artificial vision is turned on for texture
recognition,
5. Velocity is estimated with data from textures
and slopes of the surface,
6. The robot receives the order to advance along
the path at the estimated velocity,
7. The robot velocity is updated when a change
in texture is recognized, or if sensors detect a
slope on the surface, or if both events occur,
8. If sensors detect an obstacle, or if slope
inclination is greater than 15 degrees, then
the robot stops and texture recognition
algorithm is turned off, return to step 3;
Otherwise, velocity is updated, return to step
7,
9. The robot stops when it has reached the goal
location or destination.
3.1 Experimental Step
A car-like rover from the Bioloid robot transformer
kit (ROBOTIS, 2010) is used, which uses a
processing unit, four servomotors for power
transmission to the wheels, two infrared sensors
located in the robot front, and a wireless camera on
top-front of the robot. The robot dimensions are 9.5
cm width per 15 cm length. In these experiments the
FNN is trained with terrain textures from images in
Figure 1.
Figure 5: Path Planning and Velocity estimation
algorithms running concurrently.
In this platform it is used a personal computer
(PC) and the processor of the robot, to form a
master-slave architecture, wirelessly communicated.
On the PC are implemented and executed the path
planning and velocity estimation algorithms. The
robot, on one hand, reports to the PC the sensors
readings and wirelessly transmits the images
captured by the camera. On the other hand, the robot
performs the movements in accordance with
instructions that the PC communicates it. The
experiments are performed in the environment
shown in
Figure 2, whose area is 2.25 m
2
, covered
with dust, soil, dry leaves, branches and 2 cm-high
grass; it contains rocks and small earth-mounds. The
goal point is located 2.12 meters in a straight line
from the initial location of the robot.
There were conducted 30 tests divided into three
parts, using the path planning algorithm. In first part,
the tests were performed at medium constant
velocity 6.95 cm/s; in the second part at the
maximum velocity the robot can reach 13.88 cm/s.
The other tests were performed with velocity
updating, combining path planning and velocity
updating algorithms. Table 2 shows the results.
With velocity updating, both the detection of the
robot environment and path planning are
strengthened. By adjusting the velocity according to
surface characteristics, safety increases and/or the
travel time of the robot decreases. That is, if it
detects that the surface is slippery then the robot
slows down, although the robot spends more time to
reach the goal location, the probability that the robot
has an accident decreases.
3.2 Results and Navigation
Performance
The common standards criterion to evaluate the
performance of robots is (Dai et al., 2007), (Matthies
et al., 1995): accurate estimation of the robot
location, fast and accurate detection of the robot
environment and reliable path planning for moving
from one place to another without colliding with
obstacles in unknown environments. This is true for
this proposal and adds the following:
• The total time it takes the robot to make the
route and,
• Comparing the distance travelled by the robot
with the straight line distance between the
initial and goal locations.
When the robot moves at medium constant
velocity (6.94 cm/s), it runs 107.72% of the straight
line distance between the initial and goal locations.
The travel distance is increased because of the
obstacle avoidance and the location estimation errors
WHEELED-ROBOT NAVIGATION WITH VELOCITY UPDATING ON ROUGH TERRAINS
281

Table 2: Autonomous navigation results with and without
velocity updating.
Constant velocity
With
velocity
updating
Navigation
velocity
6.94 cm/s
13.88
cm/s
8.65 cm/s
(average
velocity)
Navigation
distance
228.5 cm
111.29
cm
220.33 cm
Navigation
time
43.10 s 19.08 s 32.55 s
generated by the slippage of wheels. On the other
hand, when the robot moves at maximum constant
velocity (13.88 cm/s) runs, on average, 52.46% of
the path. The plausible explanation is that when the
robot moves at maximum velocity the wheels slip
more often and therefore the location estimation of
the robot becomes very imprecise. With velocity
updating the robot travels the 103.86% of the
straight line distance between the initial and goal
locations. In this case the distance is less than with
medium constant velocity because the wheel
slippage is less frequent, see Table 3. By updating
the velocity the robot moves slower in areas that
favour the slippage of wheels, for instance loose
soil. Because of there are fewer slippages, the
location estimation of the robot is more accurate and
consequently the robot approaches the goal location.
The navigation time with velocity updating is
32.41% less and 41.38% higher than medium and
maximum constant velocity, respectively. It is noted
that with medium constant velocity the robot travels
a path with good accuracy but spends more time
doing the travelling. With maximum constant
velocity the travelling is fast but the accuracy to
traverse the path is very bad. With velocity updating
performance is improved because the precision of
the robot in the travelling of the trajectory is good
and is performed in less time, i.e., the robot moves at
optimum velocity, depending on surface
characteristics, avoiding wheel slippage. With our
approach the average velocity represents 62.13% of
the maximum velocity the robot can reach.
4 DISCUSSION
Within the present approach, the robot moves on
surfaces with different kinds of textures, to make
navigation more versatile than such related works.
The Martian surface can be considered as a special
case of our approach because these surfaces are
Table 3: Percentage of travelled distances, with maximum
and medium constant velocity; and with velocity updating.
Constant Velocity With
velocity
updating
Medium Maximum
Percentage
of distance
travelled
107.72% 52.46% 103.86%
covered with sand and rocks, i.e., there is only one
type of roughness. Actually, for the purpose of
autonomous navigation on rough terrains is not a
requisite to recognize textures at a high detail level.
The high precision methods on details recognition
are not the adequate but failed for supporting robots
navigation –strongly some times. In addition, the
detailed recognition of surfaces is computationally
expensive, but a low consume of resources is
recommended through autonomous navigation.
Our approach can be improved on the location
estimation of the robot. So far, it has been used
odometry only to calculate the robot location. Most
of the works, if not all, that employ odometry use
other tools to estimate the location of the robot such
as electronic compasses (Seraji and Werger, 2007),
sonar sensors (Dai et al., 2007), GPS (Matthies et
al., 1995), among others. However, velocity
updating reduces wheel slippage and the drift errors
are small or occur less often.
On the other hand, the proposed algorithms are
not limited to be applied to small vehicles. They can
be extrapolated to other vehicles, depending on the
particular characteristics, which define the
appropriate rules of the vehicle operation. The
algorithm is scalable to different vehicles by using
as parameters their particular characteristics, such as
weight, size and motor power, tires material and tire
tread, among others.
In this proposal we claim that for velocity
updating the experience of human drivers is
mimicking by using the inference system of the
fuzzy neural network, which model the operation of
the vehicle based on the driver experience.
There are works that model the vehicles driving
with differential equations (Nakamura et al., 2007),
(Kim et al., 2008), (Ward and Iagnemma, 2008). But
this approach is difficult because, in general,
differential equations are nonlinear, and their
solution is hard to obtain.
Within the algorithms testing, we have simulated
the path of a truck. These tests consisted of placing a
camera on the roof of the truck. The truck runs on
various types of textures. During the truck trips, the
camera recorded from a similar driver’s visual field
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
282

the crossed surfaces. Then, texture images are
extracted from video recordings, which are
processed by the algorithms.
The velocity updating results are encouraging.
To process the 480×640-pixel images with the
microprocessor Centrino Core 2 Duo at 2 GHz and
1.99 Gb RAM, the algorithms time spent is small,
0.3 seconds. It leads to conclude that vehicles with
these computer capacities have enough time to react
or to break on the next 5 meters, as soon as they are
moving at 60 km/hr, which is a car maximum
velocity in the city, and a standard speed on
principal roads.
5 CONCLUSIONS
In this paper a proposal for wheeled robot navigation
on outdoor surfaces with different kind of roughness
and soft irregularities is presented. The robot
integrates the path planning gradient method with a
multi-layer fuzzy neural network in order to adjust
velocity, by regarding the roughness and the slopes
of the terrain. The artificial vision implementation is
computationally low-cost. Wheeled-robot navigation
becomes more efficient and safe because of the
velocity updating. That is because, whenever the
robots navigates, the velocity is updated by
regarding the terrains characteristics, the wheel
slippage is significant reduced, hence improving, the
precision to achieve the goal location as well as the
navigation time; thereafter, the risk that the robot
suffers an accident is also decreased. On the
opposite, without velocity updating it becomes more
difficult the goal location approach as reported
results show.
ACKNOWLEDGEMENTS
The authors would like to thank the financial support
of CINVESTAV-IPN, Centro de Investigación y de
Estudios Avanzados del Instituto Politécnico
Nacional. As well Farid García, scholarship no.
207029, would like to thank the financial support of
CONACyT, Consejo Nacional de Ciencia y
Tecnología.
REFERENCES
Brooks, C.A. and Iagnemma, K. (2009). Visual Detection
of Novel Terrain via Two-Class Classification. In:
Proceedings of the 2009 ACM Symposium on Applied
Computing, 1145-1150.
Dai, X., Zhang, H. and Shi, Y. (2007). Autonomous
Navigation for Wheeled Mobile Robots-A Survey. In:
Second International Conference on Innovative
Computing, Information and Control, September 5-7,
Kumamoto, Japan, 2207-2210.
Ishigami, G., Nagatani, K. and Yoshida, K. (2007). Path
Planning for Planetary Exploration Rovers and Its
Evaluation Based on Wheel Slip Dynamics. In: IEEE
International Conference on Robotics and
Automation, April 10-14, Roma, Italy, 2361-2366.
Kahraman, F. and Stegmann, M.B. (2006). Towards
Illumination-Invariant Localization of Faces Using
Active Appearance Models. In: 7th Nordic Signal
Processing Symposium, June 7-9, Rejkjavik, Iceland,
4.
Kelly, A. and Stentz, A. (1998). Rough Terrain
Autonomous Mobility – Part 2: An Active Vision,
Predictive Control Approach. Autonomous Robots,
5(2), 163-198.
Kim, P.G., Park, C.G., Jong, Y.H., Yun, J.H., Mo, E.J.,
Kim, C.S., Jie, M.S., Hwang, S.C. and Lee, K.W.
(2007). Obstacle Avoidance of a Mobile Robot Using
Vision System and Ultrasonic Sensor. In: Third
International Conference on Intelligent Computing,
August 21-24, Qingdao, China, 545-453.
Kim, Y.C., Min, K.D., Yun, K.H., Byun, Y.S. and Mok,
J.K. (2008). Steering Control for Lateral Guidance for
an All Wheel Steered Vehicle. In: International
Conference on Control, Automation and Systems.
October 14-17, Seoul, Korea, 24-28.
Konolige, K. (2000). A Gradient Method for Realtime
Robot Control. In: Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and
Systems. October 31 – November 5, Takamatsu, Japan,
639-646.
Lambert, A., Gruyer, D., Pierre, G.S. and Ndjeng, A.N.
(2008). Collision Probability Assessment for Speed
Control. In: 11
th
International IEEE Conference on
Intelligent Transportation Systems. October 12-15,
Beijing, China, 1043-1048.
Larson, A.C., Voyles, R.M. and Demir, G.K. (2005).
Terrain Classification Using Weakly-Structured
Vehicle/Terrain Interaction. Autonomous Robots,
19(1), 41-52.
Nakamura, S., Faragalli, M., Mizukami, N., Nakatani, I.,
Kunii, Y. And Kubota, T. (2007). Wheeled Robot with
Movable Center of Mass for Traversing over Rough
Terrain. In: Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and
Systems. October 29 – November 2, 1228-1233.
Matthies, L., Gat, E., Harrison, R., Wilcox, B., Volpe, R.
and Litwin, T. (1995). Mars Microrover Navigation:
Performance Evaluation and Enhancement.
Autonomous Robots, 2(4), 291-311.
Pereira, G.A.S., Pimenta, L.C.A., Chaimowicz, L.,
Fonseca, A.F., de Almeida, D.S.C., Correa, L.Q.,
Mesquita, R.C. and Campos, F.M. (2009). Robot
Navigation in Multi-Terrain Outdoor Environments.
WHEELED-ROBOT NAVIGATION WITH VELOCITY UPDATING ON ROUGH TERRAINS
283

International Journal of Robotic Research, 28(6), 685-
700.
ROBOTIS Co., (2010). http://www.robotis.com.
Selekwa, M.F., Dunlap, D.D., Shi, D. and Collins, E.G.
(2008). Robot Navigation in Very Cluttered
Environments by Preference-Based Fuzzy Behaviors.
Robotics and Autonomous Systems, 53(3), 231-246.
Seraji, H. and Howard, A. (2002). Behavior-Based Robot
Navigation on Challenging Terrain: A Fuzzy Logic
Approach. IEEE Transactions on Robotics and
Automation, 18(3), 308-321.
Seraji, H. and Werger, B. (2007). Theory and Experiments
in SmartNav Rover Navigation. Autonomous Robots,
22(2), 165-182.
Sun, Z., Bebis, G. and Miller, R. (2006). On-Road Vehicle
Detection: A Review. IEEE Transaction on Pattern
Analysis and Machine Intelligence, 28(5), 694-711.
Wang, M. and Liu, J.N.K. (2005). Behavior-Blind Goal-
Oriented Robot Navigation by Fuzzy Logic. In:
Proceedings of Knowledge-Based Intelligent
Information and Engineering Systems, 686-692.
Ward, C.C. and Iagnemma, K. (2008). A Dynamic-Model-
Based Wheel Slip Detector for Mobile Robots on
Outdoor Terrain. IEEE Transactions on Robotics,
24(4), 821-831.
Ward, K. and Zelinsky, A. (2000). Acquiring Mobile
Robot Behaviors by Learning Trajectory Velocities.
Autonomous Robots, 9(2), 113-133.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
284
