
TOWARDS A GENERIC DESIGN FOR GENERAL-PURPOSE
SENSOR NETWORK NODES
Position Paper
Stefan Gruner
Department of Computer Science, University of Pretoria, Lynnwood Road, 0002 Pretoria, South Africa
Keywords: Standardisation, Sensor network node, Cybernetic interaction model, Micro operating system, Software
application interfaces.
Abstract: The key to mature and efficient industrial software engineering is standardisation more than an aggressive
struggle for innovation only for the sake of its own. This is assumption is also held for the area of sensor
networks development, which is becoming an increasingly important field at the interface between software
and hardware engineering. This short position paper proposes and outlines a generic design for the nodes of
such sensor networks, which could be used in the future as the basis of almost any conceivable sensor
network application. On such a basis of generic standardisation, the development of specific and particular
sensor network applications will then be mainly a matter of hardware-independent programming with APIs,
as it is already well known in the classical domain of operating systems in ordinary desktop PCs.
1 MOTIVATION AND RELATED
WORK
Software engineering for common-place devices
(like personal desktop computers) has become
comparatively easy during the past decades, mainly
because of reasonably high levels of standardisation
in the design of hardware platforms, operating
systems (OS) and application program interfaces
(API) in the context of those common devices.
Software engineering for non-standard devices, such
as robots (Campbell, 2009) or the physical nodes of
(wireless) sensor networks, is still comparatively
harder, which has (amongst other reasons) much to
do with a shortage of standardisation in this field.
There is much agreement amongst many software
engineering experts that only the specialization of
well-defined sub-areas of software engineering will
eventually lead to methodological maturity of the
discipline. For comparison: there is no such thing as
general ‘hardware engineering’; in the domain of
hardware we can find automotive engineering,
electronics, railway engineering, and so on. Positive
examples in our field, software engineering, are
compiler construction, or relational data-base
construction, which are well understood since many
years and do not confront us with major difficulties
any longer. In the long run, the same must become
true also for other sub-areas of software engineering,
such as the construction of software for sensor
network applications, embedded systems, and so on.
Further positive examples pointing into the right
direction are the standardisation of software systems
for the automobile industry (Dörr, 2008), as well as
the already mentioned standardisation attempts for
robotic platforms (Campbell, 2009).
The need for standardised frameworks in the
area of wireless sensor network development was
most recently also addressed by (Alkazemi, 2010).
In that paper a general system model was outlined
on the basis of several layers from the hardware
level via operating system levels up to the interfaces
for the user application software. Also in (Alkazemi,
2010) one can thus find a ‘classical’ well-understood
technique being transfered into a comparatively new
application domain, namely the domain of wireless
sensor nodes. In such a way by separating a node’s
hardware from the user’s application programs with
intermediate layers of firmware and system-software
the re-usability of such a node in different scenarios
can be considerably increased (Alkazemi, 2010).
The same principle of layering was also applied in
the approach of (Dörr, 2008) for non-standard
hardware in the domain of automobile software
engineering. In all these layered approaches there is
of course a trade-off between flexibility and speed:
259
Gruner S. (2010).
TOWARDS A GENERIC DESIGN FOR GENERAL-PURPOSE SENSOR NETWORK NODES - Position Paper.
In Proceedings of the Fifth International Conference on Evaluation of Novel Approaches to Software Engineering, pages 259-264
DOI: 10.5220/0003029802590264
Copyright
c
SciTePress
more layers between hardware platform and the user
application program will lead to more application
flexibility at the expense of computational speed
(performance) whereas less intermediate layers will
lead to greater speed at the expense of flexibility. At
the moment, the user applications are mostly
implemented very close to the hardware of a sensor
node, which is due to the limited storage capacity of
such devices, such that the programming of the user
application code is a cumbersome task and the result
of such efforts will not be characterised by high
reusability. In some way we could say that wireless
sensor networks with their small computational
nodes have taken us back into the early days of
computing when storage and computational power
was limited and sophisticated operating systems did
not exist. However, according to Moore’s law, one
might reasonably expect that this situation will
change rather sooner than later, such that a layered
application approach to the deployment of software
on tiny sensor nodes will become feasible, too.
Under this presumption also this short position paper
is presented.
This short position paper outlines a generic
model, at a high level of abstraction, of sensor
network nodes which is supposed to serve as a basis
for future standardisation efforts at the interfaces
which this model defines. The finer details of
construction and implementation (for example,
whether communication between a node and its
partners is synchronous or asynchronous, whether a
node has a unique identity or is anonymous in a
network, whether or not a node can change its
internal state on the basis of a memory, etc.) are left
deliberately un-specified, such that the model does
not undermine its own reusability by being overly
specific. The ‘engine’ part of this model is derived
from (Ellis, 2008), with additional parts added to
describe the interactions between a node and its
environment. For each part identified by this model
it should then become possible for designers and
developers to create standardised interfaces and re-
usable software module libraries, such that (in the
end) the deployment of software-driven sensor
network applications of any kind will become very
much a matter of component-based development
(CBD) (Lau, 2004) (Alkazemi, 2010) of well
understood devices (Maibaum, 2008) in the fashion
of the classical engineering disciplines.
2 SCHEMA OF A SENSOR NODE
A conceptual assumption is made ab-initio: For a
network of nodes, being a distributed concurrent
system (Tanenbaum, 2007), it is here assumed for
the sake of simplicity that every node, as an atomic
unit of the network, is not yet another, concurrent
micro-system in itself; instead it is assumed here that
every node is based on a mono-processor with
internally sequential operations. This does not imply
any loss of generality: Should one technically wish
to construct a distributed sensor network system of
which the nodes are concurrent systems (on the
micro-level) based on poly-processors themselves,
then we would be dealing with a distributed system
of higher order, whereby each concurrent poly-
processor node can also be modeled as a distributed
system in the same terms of the model described in
this position paper. For better understandability the
model will be developed and discussed stepwise in
the following paragraphs.
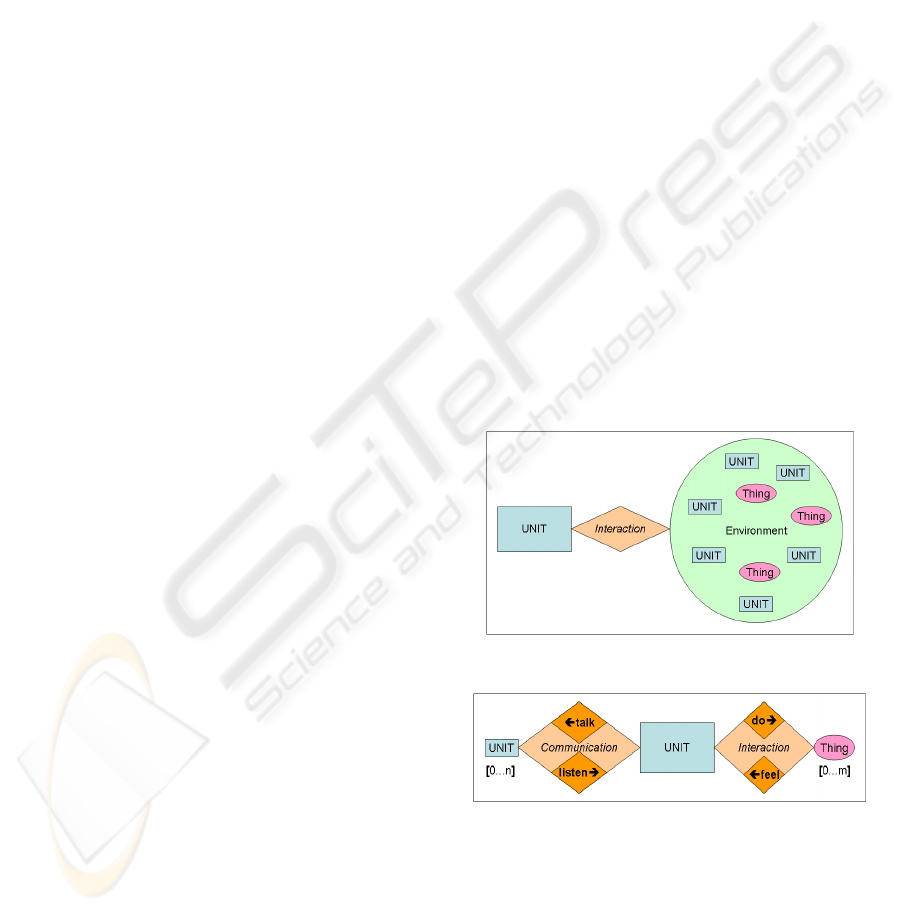
Initially we know only that we have a unit,
which is a sensor node, which somehow interacts
with its environment. The environment typically
comprises all sorts of things, including other units,
but the inner details of the unit and its forms of
interactions are not yet specified. This situation is
shown in Figure 1.
Figure 1: Unit interacting with a diverse environment.
Figure 2: Classification of different types of interactions in
various directions.
Thus we realize that different modes of
environment engagement will be needed: one for the
units (of the same or similar type) with which our
first unit forms a society, and one for the other
influential or influencable entities or agents or
‘things’ which do not have ‘member’ status in the
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
260
society of units that constitutes a wireless sensor
network. This can be modeled as shown in Figure 2,
with communication amongst units and (other)
interaction between units and things, whereby in for
communication we can further distinguish talking
and listening, whereas in interaction we can further
distinguish doing and feeling. In other words: any
device which can be described in terms of the
schema of Figure 2, regardless of the details of its
technical construction, is a general-purpose node for
deployment in a sensor network application.
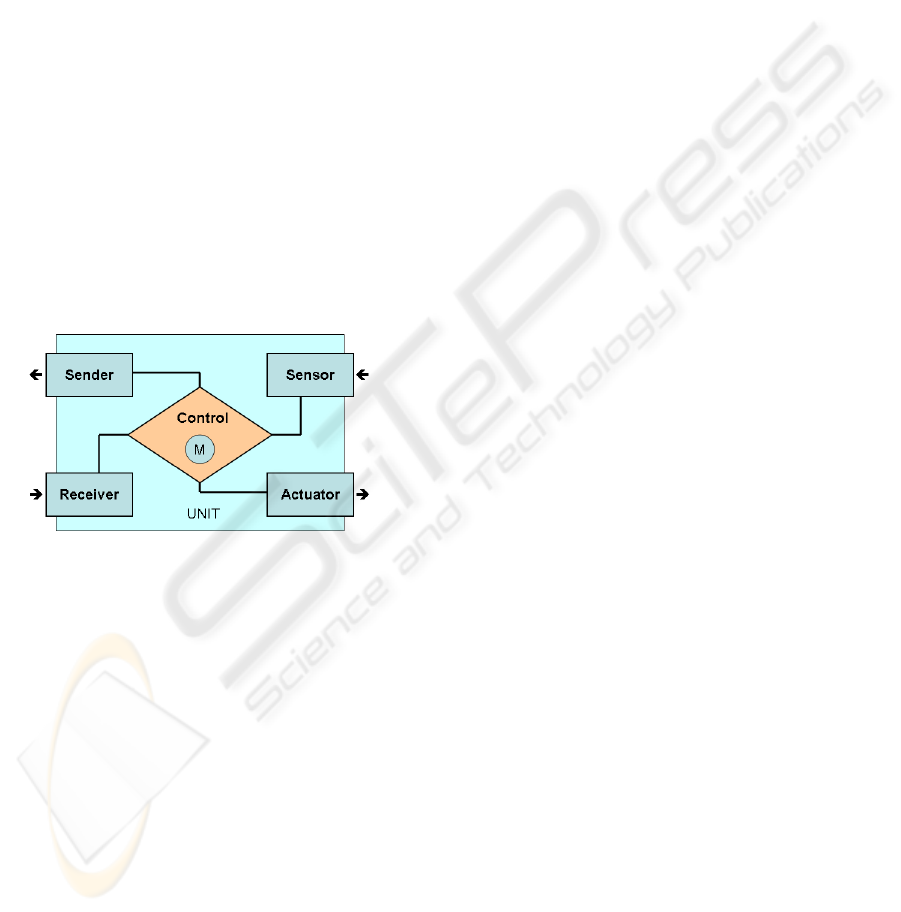
We have now reached the point at which we can
no longer regard our model unit as black box any
longer. Feeling and doing, talking and listening are
usually implemented technically by sensor(s) and
actuator(s), sender(s) and receiver(s), the abstract
model of which is depicted in Figure 3. The control
relation, by which sender, receiver, sensor and
actuator are related, is obviously also not an atomic
concept: there should be some form of memory (‘M’
in Figure 3) to capture a unit’s possibly changeable
internal state, as well as the finer structures and
algorithms (not shown in Figure 3) by which the
control relation must be implemented.
Figure 3: Coarse components of the stanndardised general-
purpose sensor network node unit.
With such a purposefully abstract design
schema, many technical variations, for different
network applications, are possible:
• A unit could communicate with only one
other unit in a master-servant-relation;
• A unit could communicate with N other
peer units, whereby N is a-priori defined
and fixed;
• A unit could communicate with n other
peer units, whereby n is not a-priori defined
and could even vary in time as n(t);
• A unit could be ‘mute’ (no talking);
• A unit could be ‘deaf’ (no listening);
• A unit could sense only one type of feeling
(in various degrees of intensity);
• A unit could sense N different types of
feelings (in various degrees of intensity);
• A unit could perform only one type of
action to the environment;
• A unit could perform N different types of
action to the environment;
• A unit could be ‘blind’ (no sensing);
• A unit could be environmentally passive
(without acting).
Depending on the behavioural variations as outlined
above, the following technical variations seem to be
reasonable:
• Where N is fixed a-priori, the unit could
possess a multiplicity of N distinguished
senders, receivers, sensors, actuators as sub
components, each of which would then be
individually accessible by the controller.
• Where n is not a-priori determined, or even
variable as n(t) during the passage of time,
each of the unit’s sub components (sender,
receiver, sensor, actuator) could be
implemented internally (on the fine scale), for
example, as queue-buffered multiplexer with
an internal scheduler, as it is well known from
the standard operating systems literature
(Silberschatz, 2008).
Needless to emphasise that these implementational
variations will also depend on further physial
variations, for example: whether the signals to and
from the environment will come through a cable, or
wirelessly via radio waves, and so on.
In the following we still need to look at the finer
details of the control model (symbolized by the
orange `diamond’ shapes in Figure 3). Following
(Ellis, 2008) one can distinguish basically two types
(modulo finer variations) of cybernetic feedback
loops for such controlers, namely the simple, basic,
non-adaptive feedback control process, and the
considerably smarter adaptive selection process.
Both of them are suitable schemas also for the units
of sensor networks in our context, as shown and
discussed in the following paragraphs. Thereby it
should be clear from the start that those loops have
to be immediately supported by the hardware of the
unit, as they are always the same; but the particular
activities within such a cycle can vary from case to
case and from application to application and must
thus be implemented in software for the sake of
flexibility and hardware-independent programming
of such units.
The basic feedback loop according to (Ellis,
2008) is depicted in Figure 4. The meaning of this
picture is that a system tries to stabilize its internal
state by repeatedly comparing its internal state with
a set of pre-defined goals. In the case of discrepancy
TOWARDS A GENERIC DESIGN FOR GENERAL-PURPOSE SENSOR NETWORK NODES - Position Paper
261
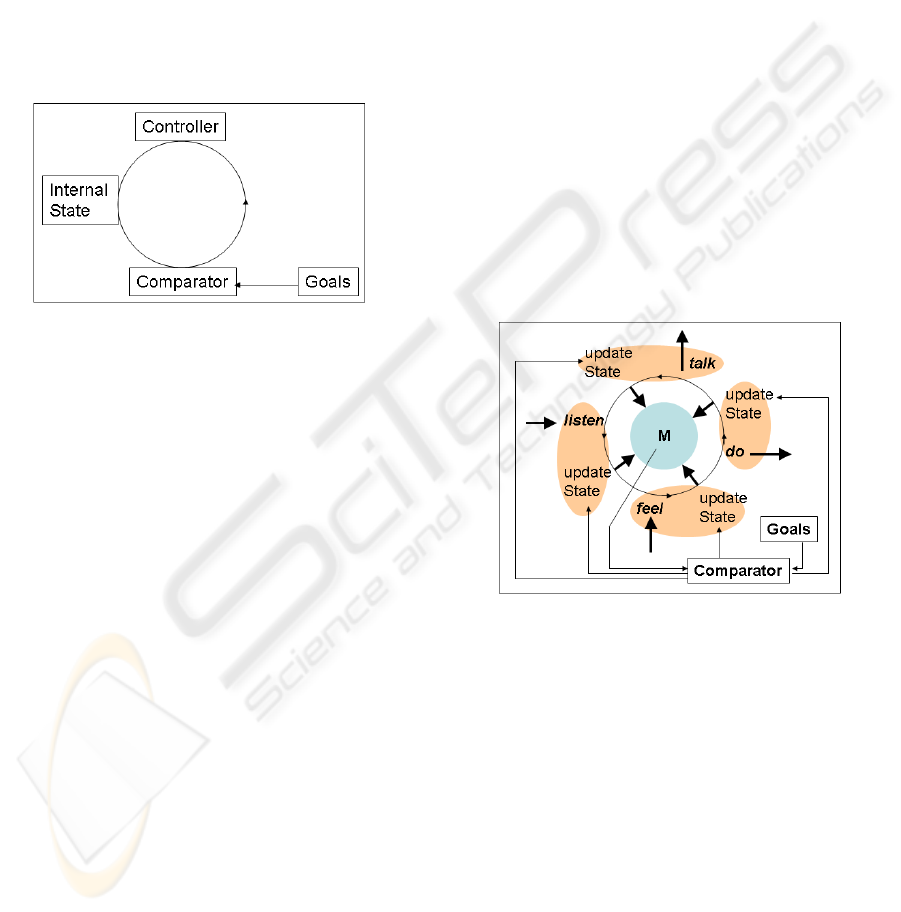
the controller attempts to change the system’s
internal state such as to better approximate the pre-
defined goals. These goals can either be implicitly
encoded (‘hardwired’) into the system, or –which
whould be preferable from a software engineering
perspective for the sake of flexibility and wider
applicability– they can also be explicitly provided in
and by a separate module (in program code). Also
note that nothing is stipulated about how frequently
this cycle has to be executed in real time – this is an
important issue in the ‘real world’ of sensor network
applications in which nodes with little resources in
battery capacity have to ‘fall asleep’ from time to
time in order to save their own energy.
Figure 4: Simple non-adaptive feedback loop (Ellis 2008).
An example for such a simple feedback loop would
be a simple thermostat: Let the goal temperature in
an air-conditioned room be 21
o
C. If the actual room
temperature raises above that value, the controller
would start cooling; if the actual room temperature
falls below that value, the controller would start
heating. To avoid hectic (and costly) ‘vibrations’ of
the system around a ‘point’ goal (such as 21
o
C) one
could also define a ‘range’ goal (such as 20–22
o
C),
such that cooling would start only above 22
o
C, and
heating would start only below 20
o
C; in this way the
system needs to trigger actions less frequently and
could thus save some of its own battery power. On
the basis of such a simple design schema, a number
of variations are possible, for example:
• The number of goals can vary from 1 to N;
(it is however fixed a-priori in this design).
• In the case of only 1 goal, the goal could be
trivial (‘true’, always fulfilled), in which
case the comparator sub-component would
become obsolete; (which is basically
equivalent to having no ‘goal’ at all: take,
for example, a broadcaster unit which only
forwards received messages to other units
in a network).
• The system could also be ‘stateless’, i.e.
with only 1 internal state that cannot vary
over time; such a system would not need
any freely programmable random access
memory (RAM) – though this is probably
not a very realistic variant in our context of
software-driven sensor networks.
However, this basic model of (Ellis, 2008) needs to
be somewhat modified in our context, particularly
since the primary purpose of a unit in a sensor
network is not to ‘survive’ by self-stabilisation in its
environment; the purpose of a unit in our context is
to communicate and to interact (for which ‘survival’
is only an existential precondition). Moreover, the
modified process cycle (on the basis of Ellis’s) must
also take our four sub components, which interface
with the unit’s environment (i.e. sender, receiver,
sensor, actuator), into consideration. The according
schema is depicted in Figure 5. Where by the chosen
interactions with the environment (feel, do, talk,
listen) will then also depend on the actual internal
state M as parameter, (thus, strictly speaking:
feel_M, do_M, talk_M, and listen_M). This we
could also call the different modes of interactions,
which can be described as
IF(boolean_condition(M)) THEN {...} ELSE {...}
Figure 5: Node design on the basis of the simple non-
adaptive feedback loop.
In this model we have basically four sub routines
(shaded in orange colour in Figure 5) for the external
interactions, whereby each of them has an internal
side effect in the form of a memory update by means
of which the unit’s external interactions (or the
consequences thereof) can be ‘logged’ for future
reference. For the sake of general applicability of the
unit, these behavioural details of those four sub-
routines should be defined in software, whereas the
cycle itself should be directly hardware-supported
for the sake of efficiency. This concept can also be
found in the design of the ‘Apache’ web-server,
which also has a basic ‘loop’ with ‘hooks’ at which
additional, case-specific functionality (modules) can
be connected (Tanenbaum, 2007). Possible technical
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
262
variations of this schema include, amongst others,
the following possibilities:
• The unit’s designer could re-arrange the
sequential order in which the internal and
external events are carried out in one cycle.
• In case that a unit would be ‘deaf’ or ‘mute’
or memory-less, the according external or
internal events (environmental interaction,
memory update) could also be skipped.
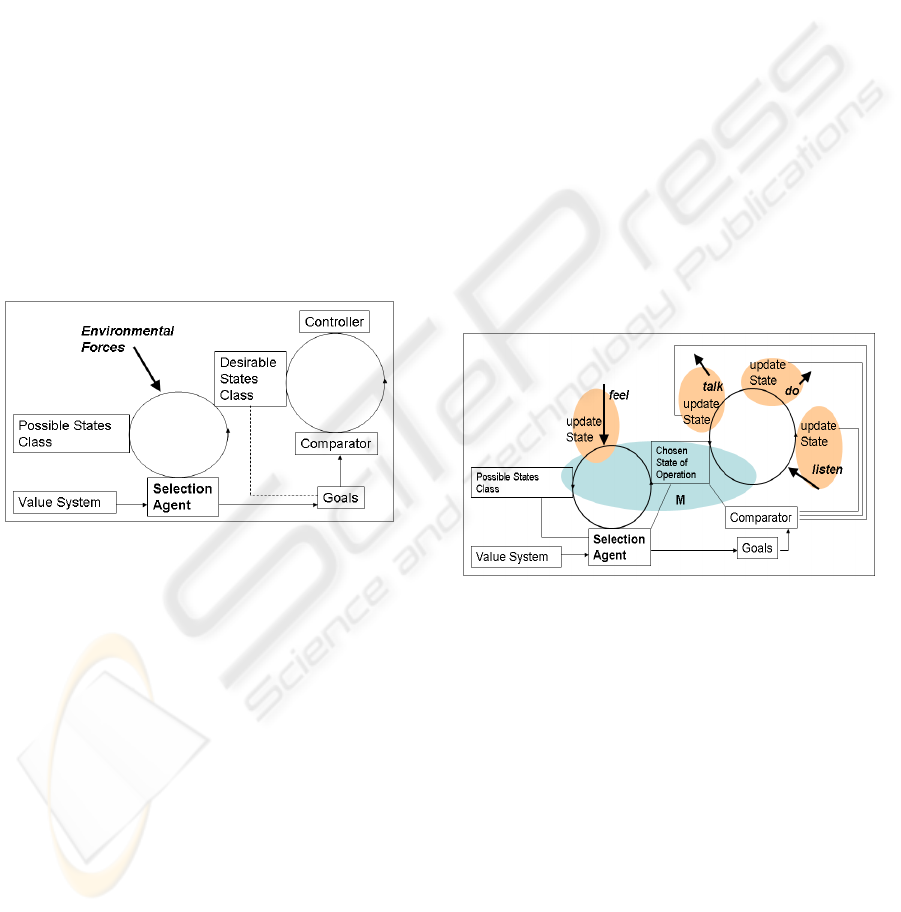
There is also a more complex and more flexibile
cybernetic feedback system which can temporarily
vary and adapt itself within the limits of some
higher-order norms which Ellis called a “value
system” (Ellis 2008). Such an adaptive cybernetic
system is depiced in Figure 6, (whereby I have made
some minor simplifications of Ellis’ original picture,
for the sake of easier understanding). The picture
basically tells us that (and how) an active unit,
embedded in an environment, can modify its own
goals in order to respond flexibly to evolutionary
pressure (from the environment) for the purpose of
survival in that (variable) environment.
Figure 6: Cybernetic system with double feedback loop,
similar to the concept from (Ellis 2008).
Also the double feedback loop can be nicely
illustrated by example a thermostat that tries to keep
the temperature of an air-conditioned room at the
goal value of around 21
o
C. Cooling and heating, a
large toom, however, costs a lot of fuel, and fuel can
run low at times. The following environmental
adaptation cycle, including a selection agent, can be
added to the system: If it is winter (i.e. very cold
outside) and the fuel supply (for heating) is low,
then the goal temperature for the thermostat is
lowered by the selection agent to around 19
o
C. If it
is summer (i.e. very warm outside) and the fuel
supply (for cooling) is low then the goal temperature
is raised by the selection agent to around 23
o
C.
Thereby, the simple thermostat cycle (in the inner
loop) keeps running as usual. The system has now
several possible internal states, one of which is
variably regarded as desirable, depending on further
external circumstances.
The question is now how to adapt this more
complicated cybernetic model into a generic,
general-purpose network node design in the context
of this paper; again we have to attach somehow our
four sub processes of interaction (listen, talk, feel,
do) to these now two cybernetic feedback loops as
they are shown in Figure 6. This could obviously be
done in very many different combinations, though
not every possible combination will make sense
from the perspective of purposeful technical system
design and software engineering. For such types of
cybernetic units I suggest the following standardized
schema for an ‘all-purpose’ type of sensor network
nodes – though, as said above, many other (though
similar) design schemas would equally be possible
for more special purposes and applications. Once
again we must also consider that the genuine
purpose of our sensor network units is not to survive
just for the sake of survival (as in Ellis’ original
scheme), but rather to provide some useful
computational and behavioural services to the users
of such a sensor network after its deployment.
Figure 7: Schema of a sensor network node based on the
double cybernetic feedback loop.
To justify the suggestion about the following design
I hint at the following anthropomorphisms and basic
experiences from human society – remember that a
sensor network was also characterized as ‘society of
units’ above.
Our ability to talk and to listen is largely
independent from environmental circumstances such
as the weather, whether its cold or hot etc.; therefore
the communicative sub processes should be attached
to the rapid, ‘inner’ feedback cycle (as before). A
similar argument can be brought forward w.r.t. our
small-scale actions and acivities. Would we now
allocate our fourth sub process, namely ‘feeling’, to
the inner feedback cycle as well, then the
placeholder for ‘Environmental Forces’ (see Figure
6 again) would remain un-instantiated, such that the
TOWARDS A GENERIC DESIGN FOR GENERAL-PURPOSE SENSOR NETWORK NODES - Position Paper
263
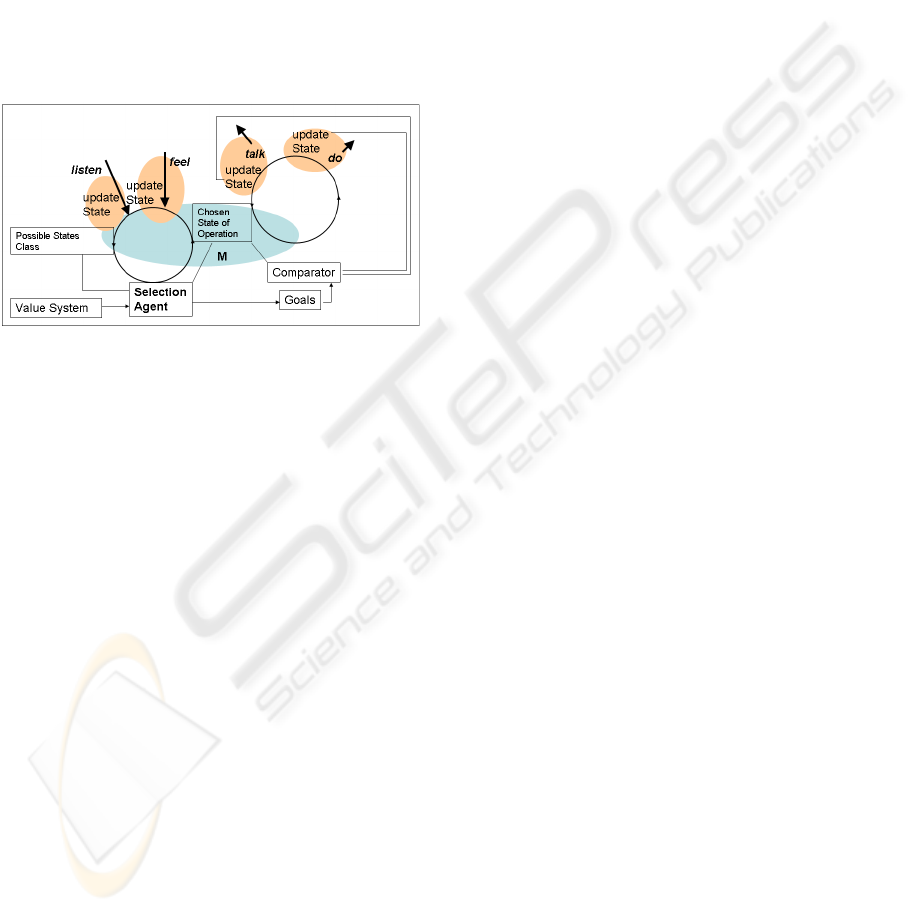
entire ‘outer’ feedback loop (including the selection
agent, the value system, etc.) would be useless and
obsolete. Consequently, the sub process for feelings
must be connected to the second (the outer, the
environmental) cybernetic cycle. The resulting
schema for higher-order network units designed
along those considerations is sketched in Figure 7,
whereby both cybernetic feedback cycles are
understood to be executed in the mode of
interleaving (pseudo-parallelism) by the unit’s
mono-processor and both cybernetic feedback cycles
also access the same memory (RAM, ‘M’ in Figure
7) the contents of which defines the unit’s internal
states.
Figure 8: Variation of the double loop design, with the
listening function hooked to the outer feedback loop.
Another feasible variant of this schema is shown
below in Figure 8, whereby also the ability to listen
is there attached to the environmental loop; consider
the thermostat example of above again, in which the
device would now receive the information about
winter or summer via messages through the
communication lines (rather than through the low-
level sensor lines).
3 SUMMARY
The conjecture underlying this short position paper
is that the design schemas outlined above will be
suitable to serve as a standardized templates for the
development of sensor network applications in
hardware and software. Thereby –in the end– each
interface identified and shown in those paterns could
be subject to industrial normalisation, as well as the
provision of micro operating systems and APIs for
the benefits of the application programmer (who
does not want to have to care about the unit’s
hardware particularities on the physical level).
Interface software between sensor node platforms
and the specific, particular user-application software
for such nodes could then be provided in analogy to
(Campbell, 2009) (Dörr, 2008). For rather simple
applications (e.g. soil temperature measurements in
geology) the simple design schema with only one
feedback loop may probably be sufficient. For more
sophisticated applications, e.g. in Robotics and
Artificial Swarms, a node design on the basis of the
double feedback loop schema may probably be the
more intelligent and more flexible ones for the
modular, component-based construction of such
units.
I suggest that, based on those design schemas,
sensor network applications in the future could be
easily produced as a matter of hardware-independent
API-programming, as we already know it today in
the domain of standard devices such as desktop PCs.
In summary this paper suggests that ‘typical’ sensor
network nodes suitable for most kinds of sensor
network application should become as ‘orinary’ as
software-driven mobile phones or PCs. However,
the technical development of such small-scale
general-purpose devices, with APIs for the
installation of scenario-specific application software
on them, requires cooperation between hardware and
software engineers.
ACKNOWLEDGEMENTS
This work is supported by the National Research
Foundation (NRF) of the Republic of South Africa.
Many thanks also to the anonymous reviewers of the
ENASE’2010 conference for their helpful comments
on the draft of this short position paper.
REFERENCES
Alkazemi, B.Y., Felemban, E.A., 2010. Towards a
Framework for Engineering Software Development of
Sensor Nodes in Wireless Sensor Networks.
Campbell, McG., 2009. Robots to get their own Operating
System. New Scientist 8, pp. 18-19.
Dörr, H., 2008. The AUTOSAR Way of Model-Based
Engineering of Automotive Systems. LNCS 5214, p.38
Ellis, G.E.R., 2008. On the nature of causation in Complex
Systems. Transact. of the Roy. Soc. of South Africa 63
/1, pp. 69-84.
Lau, K.K., 2004. Component-based Software development
Case Studies. World Scientific Publ.
Maibaum, T., 2008. Formal Methods versus Engineering.
Proc. 1
st
Internat. Workshop on Formal Methods in
Education and Training, Kitakyushu, Japan.
Silberschatz, A., Galvin, P.B., Gagne, G., 2008. Operating
System Concepts. John Wiley &Sons Publ., 8
th
edition.
Tanenbaum, A.S., van Steen, M., 2007. Distributed Syst.
Principles and Paradigms. Pearson/Prentice Hall Publ.
2
nd
edition.
ENASE 2010 - International Conference on Evaluation of Novel Approaches to Software Engineering
264
