
Specifying Formal executable Behavioral Models for
Structural Models of Service-oriented Components
?
Elvinia Riccobene
1
and Patrizia Scandurra
2
1
DTI - Universit
`
a degli Studi di Milano, Milan, Italy
2
DIIMM - Universit
`
a degli Studi di Bergamo, Bergamo, Italy
Abstract. This paper presents a behavioral formalism based on the Abstract
State Machine (ASM) formal method and intended for high-level, platform-in-
dependent, executable specification of Service-oriented Components. We com-
plement the recent Service Component Architecture – a graphical notation able
to provide the overall and the components structure – with an ASM-based for-
malism able to describe the workflow of the service orchestration and the ser-
vices internal behavior. The resulting service-oriented component model provides
an ASM-based representation of both the structural and behavioral aspects of
service-oriented systems, like service interactions, service orchestration, service
tasks and compensation. The ASM formal description of a service-oriented sys-
tem is suitable for rigorous execution-platform-independent analysis.
1 Introduction
The Service-Oriented paradigm is emerging as a new way to engineer applications that
are exposed as services for possible use through standardized protocols. Services are
loosely coupled, interoperable, evolvable, computational components available in a dis-
tributed environment. On top of these services, business processes and workflows are
used to compose services as service orchestration. The Service-Oriented Architecture
(SOA) is the architectural foundation for the Service-Oriented paradigm. SOA states
that applications expose their functionality as services in a uniform and technology-
independent way such that they can be discovered and invoked over the network. This
new programming style relies on interface-based design, composition and reusability.
It also requires specific modeling notations able to support the service-oriented system
engineering with intuitive and easy to adopt design and implementation techniques.
Recently, the Service Component Architecture (SCA) [21] project is proposed to
implement service construction based on the SOA principles. SCA provides a metamodel-
based visual notation to construct and assemble service components in a platform in-
dependent manner. The SCA initiative is divided into several specification documents,
such as the SCA assembly model specification, the SCA policy framework, etc. The
assembly model specifies the concept of service components and focuses on the re-
lationship between service components in a particular assembly. However, the SCA
?
This work was partially supported by the Italian Government under the project PRIN 2007
D-ASAP (2007XKEHFA)
Riccobene E. and Scandurra P. (2010).
Specifying Formal executable Behavioral Models for Structural Models of Service-oriented Components.
In Proceedings of the 4th International Workshop on Architectures, Concepts and Technologies for Service Oriented Computing, pages 3-15
DOI: 10.5220/0003042200030015
Copyright
c
SciTePress

assembly model lacks of a precise definition. As a service programming model, it is not
enough for SCA to provide informal definition. A rigorous semantic model for SCA
is necessary to specify the dynamic behavior of a service-oriented system, which can
provide a formal foundation for the service component assembly and support to verify
the compatibility of the assembled components. Moreover, the use of the SCA nota-
tion should be integrated within a precise engineering methodology for SOA, which,
for high-level analysis purposes, requires a formal counterpart of the SCA description.
Indeed, service-based systems usually have requirements such as service availability,
functional correctness, protection of private data, etc. Implementing services satisfying
these requirements demands the use of software engineering methodologies that encom-
pass all phases of the software development process, from modeling to deployment, but
also exploit formal techniques for qualitative and quantitative verification of systems.
This paper presents a behavioral formalism based on the Abstract State Machine
(ASM) [5] formal method and intended for the specification and analysis of service-
oriented systems at a high level of abstraction and in a technology agnostic way (i.e.
independently of the hosting middleware and runtime platforms and of the program-
ming languages in which services are programmed). This is a first result of our ongoing
work towards the development of an ASM-based back-end framework, for high-level
specification and analysis of SCA descriptions of service-oriented component systems.
ASMs expressiveness and executability allow for the definition and analysis of behav-
ioral aspects of services (and complex structured interaction protocols) in a formal way
but without overkill. Moreover, the ASM design method is supported by a set of tools
(developed through model-driven engineering technology), the ASMETA toolset [13,
2], useful for validation and verification (essentially simulation, scenario-based valida-
tion, model-based testing, and model-checking) of ASM-based models of services.
A service-oriented component model is introduced to provide an ASM-based repre-
sentation of both the structural and behavioral aspects of service-oriented systems like
service interactions, service orchestration, service tasks and compensation. In particu-
lar, the component model integrates the orchestration modeling with the specification of
service behaviors, so integrating intra- and inter- component behavior in one formalism;
this is especially useful for analysis purposes to verify “global properties” that depend
on “local properties”. We start from the SCA standard [21] for the structural aspects
of service-oriented components, and we complement the graphical view of a service-
oriented system with a formal description which is then enriched with the executable
specification of the services internal behavior and services orchestration. In particular,
for modeling services behavior, the ASMs provide atomic (zero-time) parallel execution
of entire (sub)machines – used to model service tasks – whose computations, analyzed
in isolation, may have duration and may access the needed state portion, thus combin-
ing the atomic black box and the white box view of service-oriented components. For
modeling services interaction, we exploit high-level communication patterns defined in
[26] and adapted from [3]. They model in terms of the ASMs complex interactions of
distributed service-based (business) processes that go beyond simple request-response
sequences and may involve a dynamically evolving number of participants.
This paper is organized as follows. Some background concerning the SCA standard
and the ASM formal method are given in Sect. 2 and 3, respectively. The ASM-based
30

service-oriented component model is presented in Sect. 4, while an illustrative case
study is reported in Sect. 5. Sect. 6 provides a description of related work along the
same direction and outlines some future directions of our work.
2 Service Component Architecture
The Service Component Architecture (SCA) [21] is an XML-based metadata model
that describes the relationships and the deployment of services independently from
SOA platforms and middleware programming APIs (such as Java, C++, Spring, PHP,
BPEL, Web services, etc.). SCA is also supported by a graphical notation (a metamodel-
based language developed with the Eclipse-EMF environment) and runtime environ-
ments (like Apache Tuscany and FRAscaTI) that enable developers to create service
components, assemble them into composite applications, and run/debug them.
Fig. 1. An SCA composite example (adapted from the SCA Assembly Model V1.00 spec.)
To get an overview of the architecture of SCA, we will now look at its basic building
blocks and their (inter-)relations. Fig. 1 shows an SCA composite (or SCA assembly)
as a collection of SCA components using the SCA graphical notation. Following the
principles of SOA, loosely coupled service components are used as atomic units or
building blocks to build an application.
An SCA component is a configured piece of software that has been configured to
provide its business functions (operations) for interaction with the outside world. This
interaction is accomplished through: services that are externally visible functions pro-
vided by the component; references (functions required by the component) wired to
services provided by other components or to references of the composite component
containing the component; properties allowing for the configuration of a component
implementation with externally set data values; and bindings that specify access mech-
anisms used by services and references according to some technology/protocol (e.g.
WSDL binding to consume/expose web services, JMS binding to receive/send Java
Message Service, etc.). Service and references are typed by interfaces that describe the
31

business function (operation). A particular business function is typically grouped with a
set of other related operations, as defined by an interface, which as a whole make up the
service offered by a provider component. Each invocation by a client component on a
reference operation causes one invocation of the operation on one service provider. The
provider may respond to the operation invocation with zero or more messages. These
messages may be returned synchronously or asynchronously to the requester client.
As unit of composition and hierarchical design, assemblies of service components
deployed together are supported in terms of composite components. A composite con-
sisting of: properties, services, service implementations organized as sub-components,
required services as references, wires connecting sub-components.
3 Abstract State Machines
Abstract State Machines (ASMs) are an extension of FSMs [6], where unstructured con-
trol states are replaced by states comprising arbitrary complex data. Although the ASM
method comes with a rigorous mathematical foundation [5], ASMs provides accurate
yet practical industrially viable behavioral semantics for pseudocode on arbitrary data
structures. This specification method is tunable to any desired level of abstraction, and
provides rigor without formal overkill.
The states of an ASM are multi-sorted first-order structures, i.e. domains of objects
with functions and predicates (boolean functions) defined on them, while the transition
relation is specified by rules describing how functions change from one state to the next.
Basically, a transition rule has the form of guarded update “if Condition then Updates”
where Updates are a set of function updates of the form f (t
1
, . . . , t
n
) := t which are
simultaneously executed
3
when Condition is true.
There is a limited but powerful set of rule constructors that allow to express si-
multaneous parallel actions (par) of a single agent self, either in an atomic way, Basic
ASMs, or in a structured and recursive way, Structured or Turbo ASMs, by sequential ac-
tions (seq), iterations (iterate, while, recwhile), and submachine invocations
returning values. Appropriate rule constructors also allow non-determinism (existential
quantification choose) and unrestricted synchronous parallelism (universal quantifica-
tion forall). Furthermore, it supports a generalization where multiple agents interact
in parallel in a synchronous/asynchronous way, Synch/Asynch Multi-agent ASMs.
Based on [5], an ASM can be defined as the tuple:
(header, body, main rule, initialization)
The header contains the name of the ASM and its signature
4
, namely all domain,
function and predicate declarations. Function are classified as derived functions, i.e.
those coming with a specification or computation mechanism given in terms of other
functions, and basic functions which can be static (never change during any run of
the machine) or dynamic (may change as a consequence of agent actions or updates).
3
f is an arbitrary n-ary function and t
1
, . . . , t
n
, t are first-order terms. To fire this rule to a
state S
i
, i ≥ 0, evaluate all terms t
1
, . . . , t
n
, t at S
i
and update the function f to t on pa-
rameters t
1
, . . . , t
n
. This produces another state S
i+1
which differs from S
i
only in the new
interpretation of the function f.
4
Import and export clauses can be also specified for modularization.
32

Dynamic functions are further classified into: monitored (only read, as events provided
by the environment), controlled (read and write), shared (read and write by an agent
and by the environment or by another agent) and output (only write) functions.
The body of an ASM consists of (static) domain and (static/derived) function def-
initions according to domain and function declarations in the signature of the ASM. It
also contains declarations (definitions) of transition rules. The body may also contains
definitions of axioms for invariants to assume over domains and functions of the ASM.
The (unique) main rule is a transition rule and represents the starting point of the
machine program (i.e. it calls all the other ASM transition rules defined in the body).
The main rule is closed (i.e. it does not have parameters) and since there are no free
global variables in the rule declarations of an ASM, the notion of a move does not
depend on a variable assignment, but only on the state of the machine.
The initialization of an ASM is a characterization of the initial states. An initial state
defines initial values for domains and functions declared in the signature of the ASM.
Executing an ASM means executing its main rule starting from a specified initial state.
A computation of an ASM M is a finite or infinite sequence S
0
, S
1
, . . . , S
n
, . . . of
states of M, where S
0
is an initial state and each S
n+1
is obtained from S
n
by firing
simultaneously all of the transition rules which are enabled in S
n
.
A lightweight notion of module is also supported. An ASM module is an ASM
without a main rule and without a characterization of the set of initial states.
In addition to its mathematical-based foundation, a general framework, the ASMETA
tool set [14, 2], based on the Eclipse/EMF modeling platform is also available for de-
veloping, exchanging, simulating, testing and model checking ASM models.
4 Modeling Service-oriented Systems in ASMs
A service-oriented system is a distributed system: a system made of collection of dis-
tributed computational components (computers, software applications, devices, etc.)
perceived by a user as a single system. However, compared with classical distributed
systems, service-based systems are rather non predictable as many parts may be un-
known at a given time. Indeed services are volatile distributed entities; they may be
searched, discovered, and dynamically linked with the remained part of the system en-
vironment, and unlinked at a later moment. A business process may be provided that
acts as an orchestrator, i.e. an active entity that invokes available services according to
a given set of rules to meet some business requirements. A service orchestration is a
composition specification showing how services are composed in a workflow.
We represent in ASM a service-based system exploiting the notion of distributed
multi-agent ASMs. Essentially, each business participant (or partner role) has an associ-
ated ASM agent with a program (a set of transition rules) to execute. A service-oriented
component is an ASM endowed with (at least) one agent able to be engaged in conver-
sational interactions with other external agents by providing/requiring services to/from
other (partner) service-oriented components. Moreover, in a service assembly compo-
nent (a composite component made of other internal or external service-oriented com-
ponents), an agent may act as “orchestrator” by executing (as part of its own program)
33

module A
import STDL/StandardLibrary //domains and functions for standard data types
import STDL/CommonBehavior //predefined rules for services interactions
import AService //provided services (interface)
import BService //required services (interface)
export ∗ //all functions and rules are exported
signature:
//Property
shared pA: Agent −> D //D is a domain for a data type
//Reference
shared b: Agent −> BService
//Client agent to which the component’s agent will be linked to
shared client: Agent −> Agent
//Other user−defined domains and functions (if any)
controlled rcv: Agent −> String
...
definitions:
//Axioms (if any), i.e. assumptions and constraints on functions
...
//Rule for the provided business function getPA in the AService interface
rule r getPA($a in AService, client in String) =
seq
... //Do something for the client
getPA($a,client) := ... //setting of the out business function location
endseq
//Other utility rules
...
//Agent’s program (life cycle): receive a request and handle it
rule r A () =
seq
r wreceive(client(self),”getPA”,rcv)
r getPA(self,rcv) //direct service invocation
r wreplay(client(self),”getPA”,getPA(self,client))
endseq
//Constructor rule (invokable by the container composite)
macro rule r init($a in AService) = ... //do initial properties settings and other
module AService
import STDL/StandardLibrary
export ∗
signature:
//decl. for business roles and functions
signature:
domain AService subsetof Agent
out getPA: Prod(Agent,String) −> D
...
Fig. 2. ASM modules for an SCA component A and its provided service interface AService.
an ASM rule capturing the behavior of the orchestration workflow. The resulting sys-
tem is therefore an asynchronous multi-agent ASM that will behave accordingly to the
behavior of each service (ASM agent) involved in. This main ASM also provides the
necessary initialization (such as appropriated component bindings) and initial startup
of all agents’ programs (in the main ASM rule) to make the system model executable.
4.1 Service-oriented Components and their Assemblies
A transformational semantic mapping is provided to transform SCA descriptions of
service structures into ASM-based formal descriptions. Listings in Fig. 2 and in Fig.
3 report the templates of an ASM module corresponding to an SCA component (like
the component A in Fig. 1) with its provided service interface (like the AService
interface provided by the A component) and to an SCA composite (like the composite
C in Fig. 1), respectively, using the AsmetaL notation of the ASMETA toolset.
Appropriate transformation rules map the SCA key modeling elements (compo-
nents, properties, services, references, wires, and composites) into ASM concepts. Es-
sentially, an SCA service-oriented component is mapped into an ASM module endowed
with (read: provides a type declaration for) at least one agent able to interact with other
34

module C
import A,B //import of ASM modules for subcomponents
export ∗
signature:
//Agents of the sub−components
static compA: AService
static compB: BService
//Properties
shared pA: D //D is a domain for a data type
...
shared ext: Agent //external reference
shared client: Agent −> Agent //Client agent to which the component’s agent A will be linked to
//Other user−defined domains and functions (if any)
...
definitions:
... //Axioms (if any), i.e. assumptions and constraints on functions
//Constructor rule
rule r init =
par
//wires setting
client(compA) := client
b(compA):= compB
...
//Properties setting
pA(compA):= pA
...
//Agents program assignment
program(compA) := r A()
program(compA) := r B()
//execution of agents initialization routines
r init(compA)
r init(compB)
endpar
Fig. 3. ASM template for an SCA composite C.
external service-oriented components. Each service-oriented component with its busi-
ness role has, therefore, an associated ASM and an ASM agent with a program to ex-
ecute. An SCA component’s property is straightforwardly mapped into an ASM func-
tion. An interface is a description of business functions. Services and references of a
component are typed by interfaces. An interface is mapped into an ASM module con-
taining only a collection of declarations of signature elements (domains and functions)
for the business roles, declared in terms of subdomains of the predefined ASM Agent
domain, and business functions, declared as parameterized ASM out functions. This
ASM module is imported (through import clauses) by both the “provider” ASM mod-
ule and the “requester” ASM module in order to “provide” (by giving definitions for
those elements), respectively to “require” (by exposing an explicit reference typed by
the declared agent subdomain), the declared business functions.
The ASM module A shown in the left of Fig. 2 (corresponding to the component A in
Fig. 1), for example, provides definitions for the business functions declared in the im-
ported AService ASM module (corresponding to the provided AService interface)
shown in the right of Fig. 2. The A module also provides declarations for the property
pA, the reference b to a BService agent, a reference client to a generic client
agent, and other functions. The agent domain AService declared in the AService
module and the rule r A characterize the agent associated to the component A.
The notion of service operation provided by a component is captured by a named
ASM turbo rule. It models the notion of submachine computation in a black-box view,
35

hiding the internals of the subcomputation by compressing them into one step. The
name of such a rule – it is a convention – is the same name of the out business function
declared in the typing service interface. In case of a return value, the body of such a rule
must contain, among other things, an update of such out function (location); the value
of such location denotes the value to be returned to the client. See, e.g., the r getPA
rule in the ASM module A in Fig. 2 and the occurrence within it of the business function
getPA (declared in the AService module) on the left-side of an update-rule.
Services can be accessed through references in SCA. These are abstract access end-
points to services that will be possibly discovered at runtime. In the ASMs, references
are represented in terms of functions that have as codomain a subset of the Agent do-
main named with the name of the reference’s typing interface (see, e.g., the reference
b to a BService agent in the ASM module A in Fig. 2). This domain is declared in
the ASM module corresponding to the reference’s typing interface, and the ASM mod-
ule corresponding to the component exposing the interface has also to import the ASM
module for the interface. In this way we identify (even if it is not known at design time)
the partner’s business role (i.e. the agent type).
An SCA composite component (made of an assembly of components) is represented
by a composite ASM module that embeds (through import clauses) the ASM modules
corresponding to the sub-components of the SCA composite. Communication links be-
tween components are denoted in SCA by appropriated wires as configured by the as-
sembly. These links are created in the initial state or in an initialization (constructor) rule
of the ASM corresponding to the assembly component in terms of function (reference)
assignments. The ASM module C shown in Fig. 3 (corresponding to the composite C
in Fig. 1), for example, imports the ASM modules for the sub-components A and B,
and declares two references compA and compB to the agents of the subcomponents.
It also carries out in the constructor rule r init the wires setting, properties setting,
agents’ program assignment, and initialization of the sub-components. A “top-level”
composite containing the overall assembly is mapped into composite ASM (read: the
main ASM) with a possible ASM initial state to initialize the ASM modules and their
agents as dictated by the configured sub-components.
We abstract from the SCA notion of binding, i.e. from several access mechanisms
used by services and references (e.g. WSDL binding, JMS binding, etc.). We assume
that components communicate over the communication links through an abstract asyn-
chronous and message-oriented mechanism (see next subsection), where a message en-
capsulates information about the partner link and the referenced service name and data.
4.2 Service Behavior: Orchestration and Interactions
The behavior of a service-oriented system is the description of the involved service ac-
tivities composed in a workflow (orchestration). Here we adopt a simple service compo-
sition technique. We compose services by embedding more than one service component
into a top-level composite component (the main ASM). A component embeds an ASM
agent executing (as its own program) an appropriate interactive behavior or a “piece” of
orchestration workflow. The overall orchestration is, therefore, spread throughout the
36

internal components
5
and consists of the patterns of interactions (or communication).
For modeling service orchestration, basic control-flow constructs are easily sup-
ported in the ASMs by rule constructors such as the seq-rule for executing activities se-
quentially, the par-rule for synchronous parallel split of activities, the conditional rule
for alternative flows, etc.. Other control flow patterns (not reported here) can be easily
supported in ASM as formalized in [7]. For example, the “fork” and “merge” nodes (us-
ing the same terminology of the UML activity diagrams) can be used separately; a fork
node is to be intended as an asynchronous parallel split [7] that spawns finitely many
sub-agents using as underlying parallelism the concept of asynchronous ASMs. As an-
other example, the choice rule can be used to define non deterministic selection patterns
[7]. Moreover, more complicated workflow patterns like those introduced in the recent
OMG initiative Business Process Management Notation (BPMN)[24] on business pro-
cess modeling can be captured by ASM rule-patterns as well (some formalization work
for BPMN has been already done; see for example [8]).
In addition to control-flow patterns, we define three basic kinds of service activities:
(i) functional activities: they deal with data manipulation (assignments);
(ii) fault activities: they deal with faults or exceptions, and error recovery (by compen-
sation or exception handlers);
(iii) communication or interaction activities: they deal with message exchange between
services to interact. Activities (i) and (ii) do not require a special treatment as they can
be intuitively captured by means of ASM rules with no special rule constructor or rule
patterns. Compensation handlers can be, for example, specified in terms of named ASM
rules associated to certain services to be executed in case of faults. Communication ac-
tivities (iii) deserve more explanation, as better explained below.
Services are invoked (i.e. interact) through communication activities. To this pur-
pose, we take advantage of the precise high-level models for eight fundamental service
interaction patterns, given by Barros and Boerger in [3] in terms of the ASMs. They
define turbo ASM rules SEND
s
, RECEIVE
t
, SENDRECEIVE
s,t
and RECEIVESEND
s,t
to capture the semantics of both asynchronous and synchronous message passing (the
non-blocking and blocking mode) and the semantics of service interactions beyond sim-
ple request-response sequences by involving acknowledgment, resending, etc. All these
variants are denoted by parameters s ∈ {noAck, ackNonBlocking, ackblocking, noAckResend,
ackNonBlockingResend, ackBlockingResend} and t ∈ {blocking, buffer, discard, noAckBlock-
ing, noAckBuffer, ackBlocking, ackBuffer} .
Therefore, we capture the semantics of common interaction actions send, receive,
send&receive, and replay by the following ASM submachines (turbo rules):
– WSEND
noAck
(lnk, op, snd): sends data snd without blocking to the partner link
lnk in reference to the service operation op.
– WRECEIVE
noAckBlocking
(lnk, op, rcv): receives data in the location rcv from the
5
For the specification of the externally visible behavior of service components as provided to
or required from a partner, some proposals (such as [23]) adopt a (declarative) Protocol State
Machine formalism to specify which interaction a component can be engaged in which state
and under which condition. Similarly, in ASM the (unknown) behavior of an external required
component may be captured by a class of ASMs, named control-state ASMs, that specifies in
an abstract way the external partner agent’s life cycle when engaged in service interactions.
37
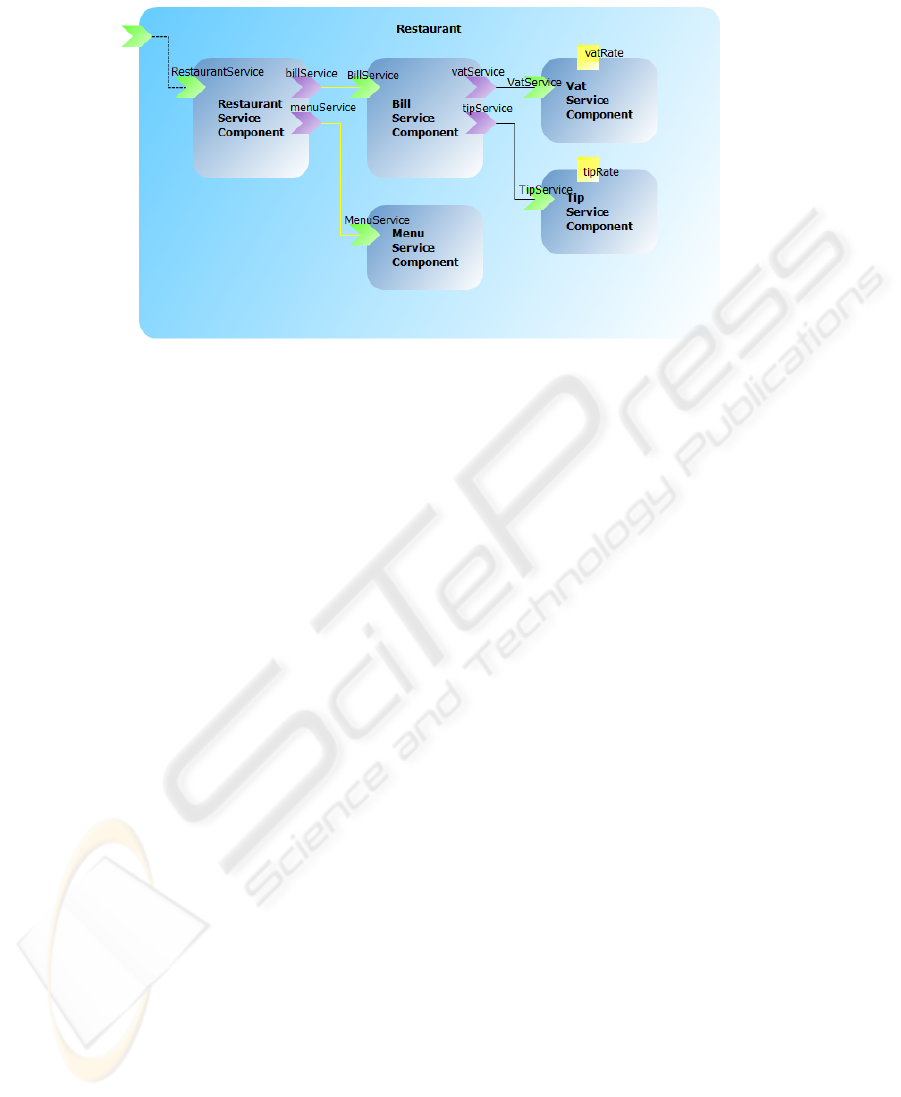
Fig. 4. SCA structure of the Restaurant case study.
partner link lnk in reference to the service operation op; it blocks until data are received.
– WREPLAY
noAck
(lnk, op, snd): returns some data snd to the partner link lnk, as
response of a previous op request received from the same partner link.
– WSENDRECEIVE
noAck,noAckBlocking
(lnk, op, snd,rcv): in reference to the service
operation op, some data snd are sent to the partner link lnk, then the action waits for
data to be sent back, which are stored in the receive location rcv.
These submachines have been already defined in [26] as “wrappers” of the general
patterns originally presented in [3]. Each of these communication rules describes one
side of the interaction and relies on a dynamic domain Message that represents message
instances managed by an abstract message passing mechanism.
Note that additional communication patterns can be supported in ASM (e.g. for
multi-party interactions) as specializations of the more abstract patterns formalized in
[3], allowing, therefore, more expressiveness in the service interactions specification.
5 Running Case Study
Fig. 4 shows the SCA assembly of the Restaurant case study taken from the SCA
distribution [21]. The Restaurant composite is a composition of five components:
RestaurantServiceComponent that allows a client to see the menus proposed
by the restaurant and also to compute the bill for a particular menu; MenuService-
Component that provides different menus; a Menu (as data type) is defined by a de-
scription and the price without taxes; BillServiceComponent that computes the
price of a menu with the different taxes; VATServiceComponent that computes the
VAT (Value Added Tax); and TipServiceComponent that computes the tip.
As example, Fig. 5 reports the ASM module for the BillServiceComponent.
The bill agents’ program and the service rule are a small orchestration example for the
coordination of the two helper services VAT and Tip.
38

module BillServiceComponent
import STDL/StandardLibrary
import STDL/CommonBehavior
import BillService //provided interface
import TipService //required interface
import VatService //required interface
export ∗
signature:
shared vatService: Agent −> VatService //reference
shared tipService: Agent −> TipService //reference
shared clientBillService: Agent −> Agent //Client agent to which the component is linked to
//Other functions used for internal computations
controlled priceWithTaxRate: Agent −> Real
controlled priceWithTipRate: Agent −> Real
controlled menuprice : Agent −> Real
definitions:
//Rule for the provided service operation getBill
rule r getBill($a in Agent, $menuPrice in Real) =
seq
r wsendreceive(vatService($a),”getPriceWithVat”,$menuPrice,priceWithTaxRate($a))
r wsendreceive(tipService($a),”getPriceWithTip”,priceWithTaxRate($a),priceWithTipRate($a))
getBill($a,$menuPrice) := priceWithTipRate($a) //setting of the out business function location
endseq
rule r BillServiceComponent = //Agent program (life cycle)
seq
r wreceive(clientBillService(self),”getBill”,menuprice(self))
r getBill(self,menuprice(self)) //direct service invocation
r wreplay(clientBillService(self),”getBill”,getBill(self,menuprice(self)))
endseq
//Constructor rule
macro rule r init($a in BillService) = skip //do nothing
Fig. 5. ASM module of the BillServiceComponent.
6 Related Work and Future Directions
On the formalization of the SCA component model, some previous works, like [9, 10]
to name a few, exist. However, they do not rely on a practical and executable formal
method like ASMs. In [18], an analysis tool, Wombat, for SCA applications is pre-
sented; their approach is similar to our as their tool is used to perform simulation and
verification tasks by transforming each SCA module into one composed Petri net. We
are, however, not sure that their methodology scales effectively to large systems.
Lightweight visual notations for service modeling have been proposed such as the
OMG SoaML UML profile [20]. The SoaML profile, like the SCA initiative, is more
focused on architectural aspects of services.
Another UML extension for service modeling, named UML4SOA [23], has been
developed within the EU project SENSORIA [19]. The UML4SOA language is fo-
39

cused on modeling service orchestrations as an extension of UML2 activity diagrams.
In order to make UML4SOA models executable, some code generators for low level
target languages (such as BPEL/WSDL, Jolie, and Java) already exist [22]; however
the target languages do not provide the same rigor and preciseness of a formal method
necessary for early design exploration and analysis.
Within the EU project SENSORIA, another modeling notation specific to the SOA
domain, named SRML [25], has been developed. SRML is a declarative modeling lan-
guage for service-oriented systems with a computation and coordination model. We
believe it is worth to study the feasibility of defining an encoding from UML4SOA
6
(or SRML) into ASMs, but we leave it as a challenge for future work. The goal of this
activity would be the definition of an executable operational semantics of UML4SOA
(SRML) models in terms of the ASMs and then explore ASM-based analysis tools.
Several process calculi for the specification of SOA systems have been designed
(see, e.g., [17, 15, 16, 4]). They provide linguistic primitives supported by mathemati-
cal semantics, and verification techniques for qualitative and quantitative properties. In
particular, in [11] an encoding of UML4SOA in COWS (Calculus for the Orchestration
of Web Services), a recently proposed process calculus for specifying services while
modeling their dynamic behavior, is presented. Compared to these notations, the ASMs
have the advantage to be executable and formal without mathematical overkill.
Within the ASM community, the ASMs have been used in the SOA domain for the
purpose of formalizing business process modeling languages and middleware technolo-
gies related to web services, like [8, 7, 12, 1] to name a few. Some of these previous
formalization efforts are at the basis of our work.
As future work, we propose to complete the proposed ASM-based service-oriented
component model towards different directions. We have been developing several case
studies, some taken from the SCATuscany distribution and some other from the EU
SENSORIA project [19], in order to assure the approach scales effectively to large and
different systems. We have been also extending the Eclipse-based SCA Tools and ex-
ploiting the Tuscany runtime that allows extension modules to be plugged in, to provide
a direct support of the ASM-based component model and automate the transformation
from SCA to ASMs. We aim also at defining and developing synthesis patterns to gen-
erate code automatically (at least for some critical parts) from ASM models of services.
We plan to revise our component model (if necessary) to take in consideration also
the changes recently made to the SCA Assembly specification [21] to introduce some
extensions for Event Processing. Moreover, since service-oriented components can be
discovered and bound to other components at run-time to produce configurations, we
want to address the behavioral aspects of service discovery (for the lookup of service
provider interfaces and service locations) and self-adaptability by extending the service-
oriented component model in ASMs with specific “roles” of service agents.
In the future, we aim also at specifying and reasoning about “classes of properties”
of services through the ASMETA analysis tools, for example, to verify the compatibility
of the assembled components and check that the services resulting from a composition
meet desirable properties without manifesting unexpected behaviors.
6
Such an encoding would be natural to carry out for the UML4SOA since we also inspired from
the UML4SOA communication activities for our interaction patterns.
40

References
1. M. Altenhofen, A. Friesen, and J. Lemcke. Asms in service oriented architectures. J. of
Universal Computer Science, 14(12):2034–2058, 2008.
2. The ASMETA tooset website. http://asmeta.sf.net/, 2006.
3. Alistair P. Barros and Egon B
¨
orger. A compositional framework for service interaction pat-
terns and interaction flows. In ICFEM’05 Proc., LNCS 3785, pages 5–35. Springer, 2005.
4. M. Boreale, R. Bruni, R. De Nicola, and M. Loreti. Sessions and pipelines for structured
service programming. In FMOODS Proc., LNCS vol. 5051, pages 19–38. Springer, 2008.
5. E. B
¨
orger and R. St
¨
ark. Abstract State Machines: A Method for High-Level System Design
and Analysis. Springer Verlag, 2003.
6. Egon B
¨
orger. The ASM method for system design and analysis. A tutorial introduction. In
Frontiers of Combining Systems, 5th International Workshop, FroCoS 2005 Proc., LNCS vol.
3717, pages 264–283. Springer, 2005.
7. Egon B
¨
orger. Modeling Workflow Patterns from First Principles. In C. Parent, K.-D. Schewe,
V. C. Storey, and B. Thalheim, editors, ER, LNCS vol. 4801, pages 1–20. Springer, 2007.
8. E. Brger, O. Srensen, and B. Thalheim. On defining the behavior of or-joins in business
process models. J. of Universal Computer Science, 15(1):3–32, 2009.
9. Zuohua Ding, Zhenbang Chen, and Jing Liu. A rigorous model of service component archi-
tecture. Electr. Notes Theor. Comput. Sci., 207:33–48, 2008.
10. Dehui Du, Jing Liu, and Honghua Cao. A rigorous model of contract-based service compo-
nent architecture. In CSSE (2), pages 409–412. IEEE Computer Society, 2008.
11. F. Tiezzi F. Banti, R. Pugliese. Automated verification of UML models of services. Submitted
for publication, 2009.
12. R. Farahbod, U. Gl
¨
asser, and M. Vajihollahi. A formal semantics for the business process ex-
ecution language for web services. In Savitri Bevinakoppa, Lu
´
ıs Ferreira Pires, and Slimane
Hammoudi, editors, WSMDEIS, pages 122–133. INSTICC Press, 2005.
13. A. Gargantini, E. Riccobene, and P. Scandurra. Model-driven language engineering: The
ASMETA case study. In Int. Conf. on Software Engineering Advances, ICSEA 2008.
14. Angelo Gargantini, Elvinia Riccobene, and Patrizia Scandurra. A metamodel-based simula-
tor for ASMs. In Andreas Prinz, editor, 14th Int. ASM Workshop Proc., 2007.
15. C. Guidi et al. : A calculus for service oriented computing. In Asit Dan and Winfried
Lamersdorf, editors, ICSOC, LNCS 4294, pages 327–338. Springer, 2006.
16. I. Lanese, F. Martins, V. Thudichum Vasconcelos, and A. Ravara. Disciplining orchestration
and conversation in service-oriented computing. In SEFM, pages 305–314. IEEE, 2007.
17. A. Lapadula, R. Pugliese, and F. Tiezzi. A calculus for orchestration of web services. In
LNCS, pages 33–47. Springer, 2007.
18. Axel Martens and Simon Moser. Diagnosing sca components using wombat. In Business
Process Management Proc., LNCS 4102, pages 378–388. Springer, 2006.
19. EU project SENSORIA, ist-2 005-016004 www.sensoria-ist.eu/.
20. OMG. The SoaML Profile, ptc/2009-04-01
21. OSOA. Service Component Architecture (SCA) www.osoa.org.
22. P. Mayer, A. Schroeder, and N. Koch. A model-driven approach to service orchestration. In
IEEE SCC (2), pages 533–536. IEEE, 2008.
23. P. Mayer et al. The UML4SOA Profile. Tech. Rep., LMU Muenchen, 2009.
24. OMG, Business Process Management Notation (BPMN). www.bpmn.org/, 2008.
25. SRML: A Service Modeling Language. http://www.cs.le.ac.uk/srml/, 2009.
26. E. Riccobene and P. Scandurra. An ASM-based executable formal model of service-oriented
component interactions and orchestration. Workshop on Behavioural Modelling - Founda-
tions and Application (BM-FA 2010), ACM DL Proc. ISBN 978-1-60558-961-9
41
