
TOWARDS FUZZY GRANULARITY CONTROL IN
PARALLEL/DISTRIBUTED COMPUTING
T. Trigo de la Vega
1
, P. Lopez-García
1,2
and S. Muñoz-Hernandez
3
1
IMDEA Software, Madrid, Spain
2
Spanish Research Council (CSIC), Madrid, Spain
3
School of Computer Science, Technical University of Madrid (UPM), Madrid, Spain
Keywords:
Fuzzy logic application, Parallel computing, Automatic parallelization, Granularity control, Scheduling, Com-
plexity analysis.
Abstract:
Automatic parallelization has become a mainstream research topic for different reasons. For example, mul-
ticore architectures, which are now present even in laptops, have awakened an interest in software tools that
can exploit the computing power of parallel processors. Distributed and (multi)agent systems also benefit
from techniques and tools for deciding in which locations should processes be run to make a better use of
the available resources. Any decision on whether to execute some processes in parallel or sequentially must
ensure correctness (i.e., the parallel execution obtains the same results as the sequential), but also has to take
into account a number of practical overheads, such as those associated with tasks creation, possible migration
of tasks to remote processors, the associated communication overheads, etc. Due to these overheads and if the
granularity of parallel tasks, i.e., the “work available” underneath them, is too small, it may happen that the
costs are larger than the benefits in their parallel execution. Thus, the aim of granularity control is to change
parallel execution to sequential execution or vice-versa based on some conditions related to grain size and
overheads. In this work, we have applied fuzzy logic to automatic granularity control in parallel/distributed
computing and proposed fuzzy conditions for deciding whether to execute some given tasks in parallel or se-
quentially. We have compared our proposed fuzzy conditions with existing (conservative) sufficient conditions
and our experiments showed that the proposed fuzzy conditions result in more efficient executions on average
than the conservative conditions.
1 INTRODUCTION
Automatic parallelization is nowadays of great inter-
est since highly parallel processors, which were pre-
viously only considered in high performance comput-
ing, have steadily made their way into mainstream
computing. Currently, even standard desktop and
laptop machines include multicore chips with up to
twelve cores and the tendency is that these figures
will consistently grow in the foreseeable future. Thus,
there is an opportunity to build much faster and even-
tually much better software by producingparallel pro-
grams or parallelizing existing ones, and to exploit
these new multicore architectures. Performing this by
hand will inevitably lead to a decrease in productiv-
ity. An ideal alternative is automatic parallelization.
There are however some important theoretical and
practical issues to be addressed in automatic para-
llelization. Two of them are: (i) preserving correct-
ness (i.e., ensuring that the parallel execution obtains
the same results as the sequential one) and (ii) (the-
oretical) efficiency (i.e., ensuring that the amount of
work performed by executing some tasks in para-
llel is not greater than the one obtained by executing
the tasks sequentially, or at least, there is no slow-
down). Solutions to these problems have already
been proposed, such as (Chassin and Codognet, 1994;
Hermenegildo and Rossi, 1995). However, these so-
lutions assume an idealized execution environment in
which a number of practical overheads such as those
associated with task creation, possible migration of
tasks to remote processors, the associated commu-
nication overheads, etc, are ignored. Due to these
overheads and if the granularity of parallel tasks, i.e.,
the “work available” underneath them, is too small,
it may happen that the costs of parallel execution are
larger than its benefits. In order to take these practi-
cal issues into account, some methods have been pro-
43
Trigo de la Vega T., Lopez-García P. and Muñoz-Hernandez S..
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING.
DOI: 10.5220/0003066100430055
In Proceedings of the International Conference on Fuzzy Computation and 2nd International Conference on Neural Computation (ICFC-2010), pages
43-55
ISBN: 978-989-8425-32-4
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

posed whereby the granularity of parallel tasks and
their number are controlled. The aim of granularity
control is to change parallel execution to sequential
execution or vice-versa based on some conditions re-
lated to grain size and overheads. Granularity control
has been studied in the context of traditional (Krua-
trachue and Lewis, 1988; McGreary and Gill, 1989),
functional (Huelsbergen, 1993; Huelsbergen et al.,
1994) and logic programming (Kaplan, 1988; Debray
et al., 1990; Zhong et al., 1992; López-García et al.,
1996). Taking all these theoretical and practical is-
sues into account, an interesting goal in automatic pa-
rallelization is thus to ensure that the parallel executi-
on will not take more time than the sequential one. In
general, this condition cannot be determined before
executing the task involved, while granularity con-
trol should intuitively be carried out ahead of time.
Thus, we are forced to use approximations. One clear
alternative is to evaluate a (simple) sufficient condi-
tion to ensure that the parallel execution will not take
more time than the sequential one. This was the ap-
proach developed in (López-García et al., 1996). It
has the advantage of ensuring that whenever a given
group of tasks are executed in parallel, there will be
no slowdown with respect to their sequential execu-
tion. However, the sufficient conditions can be very
conservativein some situations and lead to some tasks
being executed sequentially even when their parallel
execution would take less time. Although not pro-
ducing slowdown, this causes a loss in parallelization
opportunities, and thus, no speedup is obtained. An
alternative is to give up strictly ensuring the no slow-
down condition in all parallel executions and to use
some conditions that have a good average case beha-
vior. It is in this point where fuzzy logic can be suc-
cessfully applied to evaluate “fuzzy” conditions that,
although can entail eventual slowdowns in some exe-
cutions, speedup the whole computation on average
(always preserving correctness).
It is remarkable the originality of this approach
that is betting for the expressiveness of fuzzy logic to
improve the decision making in the field of program
optimization and, in particular, in automatic program
parallelization, including granularity control.
1.1 Fuzzy Logic Programming
Fuzzy logic has been a very fertile area during the
last years. Specially in the theoretical side, but also
from the practical point of view, with the development
of many fuzzy approaches. The ones developed in
logic programming are specially interesting by their
simplicity. The fuzzy logic programming systems
replace their inference mechanism, SLD-resolution,
with a fuzzy variant that is able to handle partial truth.
Most of these systems implement the fuzzy resolu-
tion introduced by Lee in (Lee, 1972): the Prolog-Elf
system (Ishizuka and Kanai, 1985), the FRIL Prolog
system (Baldwin et al., 1995) and the F-Prolog lan-
guage (Li and Liu, 1990).
One of the most promising fuzzy tools for Prolog
was the “Fuzzy Prolog” system (Guadarrama et al.,
2004). Fuzzy Prolog adds fuzziness to a Prolog com-
piler using CLP(R ) instead of implementing a new
fuzzy resolution method, as other former fuzzy Pro-
logs do. It represents intervals as constraints over
real numbers and aggregation operators as operations
with these constraints, so it uses the Prolog built-in
inference mechanism to handle the concept of partial
truth.
1.1.1 RFuzzy
Besides the advantages of Fuzzy Prolog (Vaucheret
et al., 2002; Guadarrama et al., 2004), its truth value
representation based on constraints is too general,
which makes it complex to be interpreted by regular
users. That was the reason for implementing a sim-
pler variant that was called RFuzzy (Pablos-Ceruelo
et al., 2009a; Muñoz-Hernández et al., 2009; Pablos-
Ceruelo et al., 2009b; Strass et al., 2009). In RFuzzy,
the truth value is represented by a simple real number.
RFuzzy is implemented as a Ciao Pro-
log (Hermenegildo et al., 2008) package because
Ciao Prolog offers the possibility of dealing with a
higher order compilation through the implementation
of Ciao packages.
The compilation process of a RFuzzy program has
two pre-compilation steps: (1) the RFuzzy program is
translated into CLP(R ) constraints by means of the
RFuzzy package and (2) the program with constraints
is translated into ISO Prolog by using the CLP(R )
package.
As the motivation of RFuzzy was providing a tool
for practical application, it was loaded with many nice
features that represent an advantage with respect to
previous fuzzy tools to model real problems. That is
why we have chosen RFuzzy for the implementation
of our prototype in this work.
2 THE GRANULARITY
CONTROL PROBLEM
We start by discussing the basic issues to be addressed
in our approach to granularity control, in terms of the
generic execution model described in (López-García
et al., 1996). In particular, we discuss how conditions
ICFC 2010 - International Conference on Fuzzy Computation
44

for deciding between parallel and sequential execu-
tion can be devised. We consider a generic executi-
on model: let g = g
1
,...,g
n
be a task such that sub-
tasks g
1
,...,g
n
are candidates for parallel execution.
T
s
represents the cost (execution time) of the sequen-
tial execution of g and T
i
represents the (sequential)
cost of the execution of subtask g
i
.
There can be many different ways to execute g
in parallel, involving different choices of scheduling,
load balancing, etc., each having its own cost (exe-
cution time). To simplify the discussion, we will as-
sume that T
p
represents in some way all of the possi-
ble costs. More concretely, T
p
≤ T
s
should be under-
stood as “T
s
is greater or equal than any possible value
for T
p
.”
In a first approximation, we assume that the points
of parallelization of g are fixed. We also assume, for
simplicity, and without loss of generality, that no tests
– such as, perhaps, “independence” tests (Chassin and
Codognet, 1994; Hermenegildo and Rossi, 1995) –
other than those related to granularity control are nec-
essary. Thus, the purpose of granularity control will
be to determine, based on some conditions, whether
the g
i
’s are going to be executed in parallel or se-
quentially. In doing this, the objective is to improve
the ratio between the parallel and sequential executi-
on times.
Performing an accurate granularity control at
compile-time is difficult since most of the informa-
tion needed, as for example, input data size, is only
known at run-time. An useful strategy can be to do as
much work as possible at compile-time and postpone
some final decisions to run-time. This can be achieved
by generating at compile-time cost functions which
estimate task costs as a function of input data sizes,
which are then evaluated at run-time when such sizes
are known. Then, after comparing costs of parallel
and sequential executions, it can be determined which
of these types of executions must be performed. This
scheme was proposed by (Debray et al., 1990) in the
context of logic programs and by (Rabhi and Manson,
1990) in the context of functional programs. An inter-
esting goal is to ensure that T
p
≤ T
s
. In general, this
condition cannot be determined before executing g,
while granularity control should intuitively be carried
out ahead of time. Thus, we are forced to use approx-
imations. The way in which these approximations can
be performed, is the subject of the two following sec-
tions.
3 THE CONSERVATIVE (SAFE)
APPROACH
The approach proposed in (López-García et al., 1996)
consists on using safe approximations, i.e., evaluating
a (simple) sufficient condition to ensure that the para-
llel execution will not take more time than the sequen-
tial one. Ensuring T
p
≤ T
s
corresponds to the case
where the action taken when the condition holds is to
run in parallel, i.e., to a philosophy were tasks are ex-
ecuted sequentially unless parallel execution can be
shown to be faster. We call this “parallelizing a se-
quential program.” The converse approach, “sequen-
tializing a parallel program,” corresponds to the case
where the objective is to detect whether the sufficient
condition T
s
≤ T
p
holds.
Parallelizing a Sequential Program. In order to
derivea sufficient condition for the inequality T
p
≤ T
s
,
we obtain upper bounds for its left-hand-side and
lower bounds for its right-hand-side, i.e., a sufficient
condition for T
p
≤ T
s
is T
u
p
≤ T
l
s
, where T
u
p
denotes an
upper bound on T
p
and T
l
s
a lower bound on T
s
. We
will use the superscripts l and u to denote lower and
upper bounds respectively throughout the paper. The
discussion about how these upper and lower bounds
on the sequential and parallel execution times can be
estimated are outside the scope of this paper. We refer
the reader to (Mera et al., 2008) and (López-García
et al., 1996) for a full description of compile-time
analysis that obtain lower and upper bounds on se-
quential and parallel execution times respectively as
functions of input data sizes.
Sequentializing a Parallel Program. Assume now
that we want to detect when T
s
≤ T
p
holds, because
we have a parallel program and want to profit from
performing some sequentializations. In this case, a
sufficient condition for T
s
≤ T
p
is T
u
s
≤ T
l
p
.
4 THE FUZZY APPROACH
In some scenarios, it is not allowed to perform para-
llelizations if it does not ensure any speedup. How-
ever, in most environments it is justified to sacri-
fice efficiency in some cases in order to improve the
speedup on average or in the majority of the cases.
Thus our approach is to give up strictly ensuring that
T
p
≤ T
s
holds and to use some relaxed heuristics using
fuzzy logic able to detect favorable cases.
We use as a decision criteria the formula T
p
≤ T
s
.
It is easy to transform the formula in 1 ≤ T
s
/T
p
or the
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
45

equivalent T
s
/T
p
≥ 1. We are implicitly using a crisp
criteria in the sense that we use an operator whose
truth values are defined mathematically.
If we move to classical logic and want to rep-
resent the condition of parallelizing or not a set of
subtasks using a logic predicate, we could define
greater/2 as a predicate of two arguments that is suc-
cessful if the first one is greater than the second one
and false otherwise. We could check the condition
greater(T
s
/T
p
,1) or rename this condition to a logic
predicate, greater1/1, of arity 1 that compares its ar-
gument with 1, succeeds if it is greater than 1 and
fails otherwise (i.e., greater1(1.8) succeeds, whereas
greater1(0.8) fails). With the boolean condition rep-
resented by the predicate greater1/1 it is easy to fol-
low the conservative approach presented in Section 3.
For a gentle intuition to fuzzy logic, we continue
talking about this predicate. We can see that the con-
cept of being “greater than” is very strict in the sense
that some cases in which the value is close to 1 are
going to be rejected. Let us introduce the concept of
truth value. Till now we have been using two truth
values true and false, or 1 and 0. But if we intro-
duce levels of truth we could for example provide for
a logic predicate intermediate truth values in between
0 and 1. We have defined other predicates similar to
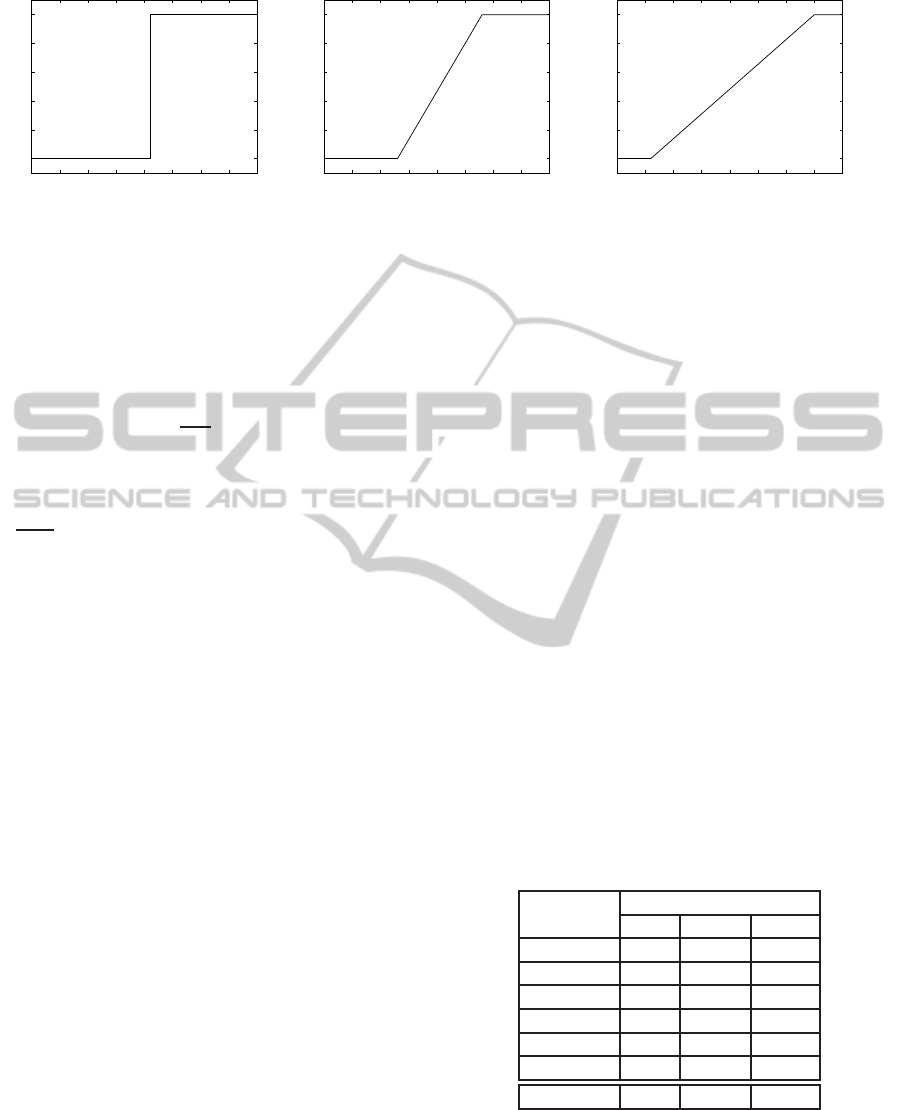
greater1/1 that are more flexible in their semantics.
They are quite_greater/1 and rather_greater/1. Their
definition is clearer in Figure 1 (and described in Sec-
tion 5.1). With this set of predicates we are going to
define a fuzzy framework for the experimental possi-
bilities of using a fuzzy criteria to take decisions about
parallelization of tasks.
4.1 Decision Making
Instead of deciding about the goodness of the para-
llelization depending on a crisp condition as in the
conservative approach, in this paper we are going to
make the decision attending to a couple of certainty
factors: SEQ, the certainty factor that is going to rep-
resent the preference (its truth value) for executing
the sequential variant of a program, and PAR, the cer-
tainty factor that is going to represent the preference
(its truth value) for executing the parallel variant of
such program. Both certainty factors are real num-
bers, SEQ, PAR ∈ [0,1]. The way of assigning a value
to each certainty factor is not unique. We can de-
fine different fuzzy heuristics for their calculation. In
Section 5.2 we are going to compare a set of them to
choose (in Section 5.3) our selected model.
Once the values of SEQ and PAR have been al-
ready assigned, if PAR > SEQ then our task schedul-
ing prototype executes the parallel variant of the pro-
gram, otherwise it executes the sequential one.
5 EXPERIMENTAL RESULTS
We have developed a prototype (Section 5.1) of a
fuzzy task scheduler based on the approach described
in Section 4. We have prepared a common frame-
work to test the behavior of a set of different heuristics
(Section 5.2) and we have compared them also with
the rules of the conservative approach (Section 3) in
order to be able to select the best results (Section 5.3).
For a better understanding of these experiments, we
present the behavior of our prototype for a progres-
sion of execution time data (Section 5.4). Finally, we
have tested our prototype with real programs (Sec-
tion 5.5) in order to demonstrate that it can be suc-
cessfully applied in practice.
5.1 Prototype Implementation
All the granularity control methods have been imple-
mented in Ciao Prolog. The classical logic rules have
been implemented using the CLP(Q) package and the
fuzzy logic rules using the Rfuzzy package.
We havedecided to use logic programmingfor im-
plementing our approach because of its simplicity and
for taking the advantage of some useful extensions
provided by the Ciao Prolog framework. In partic-
ular, Ciao Prolog has integrated static analysis tech-
niques for obtaining upper and lower bounds on exe-
cution times and a fuzzy library for the calculation of
certainty factors.
As explained before, in our new approach to gran-
ularity control, the decision of how to execute is based
on the certainty factors associated to both, sequential
and parallel executions. So that, first of all, we have
to quantify such certainty and then decide how to exe-
cute. The value to the certainty factors is provided by
fuzzy rules that are able to combine fuzzy values us-
ing aggregation operators. According to RFuzzy syn-
tax:
SEQ(P,V
s
) : op cond
1
(V
1
),cond
2
(V
2
),·· · , cond
n
(V
n
).
PAR(P,V
p
) : op
′
cond
′
1
(V
′
1
),cond
′
2
(V
′
2
),·· · ,cond
′
n
(V
′
n
).
The truth value V
s
represents how much executing the
program P in a sequential way is adequate. V
s
is ob-
tained by combining the truth values of the partial
conditionsV
1
,...,V
n
with the aggregation operator op.
Symmetrically, V
p
represents how much adequate is
the parallel execution for the program P.
The bigger factor (SEQ or PAR) will point out the
selected execution (sequential or parallel).
In order to test the behavior of our method we
have developed a set of conditions comparing a group
ICFC 2010 - International Conference on Fuzzy Computation
46
0
0.2
0.4
0.6
0.8
1
-20 -15 -10 -5 0 5 10 15 20
Ratio
0
0.2
0.4
0.6
0.8
1
-20 -15 -10 -5 0 5 10 15 20
Ratio
0
0.2
0.4
0.6
0.8
1
-20 -15 -10 -5 0 5 10 15 20
Ratio
Greater. Quite greater. Rather greater.
Figure 1: Fuzzy sets for greater.
of values of execution times: {T
l
p
,T
m
p
,T
u
p
,T
l
s
,T
m
s
,T
u
s
}
by pairs. The comparison that makes each condition
is calculated with the fuzzy relations quite_greater
and rather_greater (represented in Figure 1), whose
definitions are:
quite_greater(X) =
0 if X ≤ −7
X+7
15
if −7 < X < 8
1 if X ≥ 8
rather_greater(X) =
0 if X ≤ −14
X+14
29
if −14 < X < 15
1 if X ≥ 15
We also use the relative harmonic difference, an
experimental relation described in (Mera et al., 2008)
as follows:
harmonic_dif f(X,Y) = (X −Y) ∗ (1/X + 1/Y)/2.
We have selected this relation because it compares
two numbers in a relative and symmetric way, i.e.:
harmonic_dif f(X,Y) = −harmonic_dif f(Y, X).
The harmonic difference only works well for positive
numbers, but as we are working with execution times,
it is enough for our purposes.
These fuzzy relations can be redefined with differ-
ent bounds, although in this prototype we have only
used the values 0, 7 and 14. These bounds have been
selected according to the magnitude of the execution
times that we provide for the programs (see Table 2)
in order to obtain significant results depending on the
selected fuzzy relation.
5.2 Heuristic Comparison
In this section we discuss the evaluation of our pro-
totype with different aggregation operators. A suite
of benchmarks to test the prototype has been devel-
oped. Each benchmark has been defined in terms of
its execution times (average, upper and lower bounds
on parallel and sequential execution times) in order
to see if the new approach provides better results
than the conservative one. Obviously, in real cases,
these values will need to be estimated at compile-
time using a program analyzer like, for example,
CiaoPP (Hermenegildo et al., 2005; Mera et al.,
2008). Table 2 contains the description of the bench-
marks. Each row shows the information of one pro-
gram. The first column contains the name of the pro-
gram and, under it and between brackets, the name of
the figure which contains the graphical representation
of the benchmark. This figure allows to identify the
optimal execution in a graphic way. The following
columns show : T
l
s
(lower bound on sequential execu-
tion time), T
m
s
(averagesequential execution time), T
u
s
(upper bound on sequential executiontime), T
l
p
(lower
bound on parallel execution time), T
m
p
(average para-
llel execution time) and T
u
p
(upper bound on parallel
execution time). Each execution time is in microsec-
onds.
Figures 2, 3, 4, 5, 6 and 7 describe the benchmarks
in a graphic way. In horizontal we find both (parallel
and sequential) executions. In vertical we find, for
each execution, the interval comprised between its up-
per and lower bound on execution time.
To make things simpler, we refer to the fuzzy set
as gt, and to the relative harmonic difference relation
as hd.
The rules of fuzzy logic for calculating each condition
Table 1: Aggregation operators execution time.
Program
Aggregation Operator
max dprod dluka
p1 1.23 1.11 1.04
p2 0.42 0.51 0.45
p3 0.93 0.88 0.88
p4 0.43 0.51 0.45
p5 0.62 0.76 0.63
p6 0.56 0.62 0.57
average 0.70 0.73 0.67
PAR
i
or SEQ
i
, 1 ≤ i ≤ 7 (see Table 3), have been com-
posed using several aggregation operators but the re-
sults have shown that only the t-conorms max (max),
Lukasiewicz (dluka) and sum (dprod) are correct (i.e.,
always suggest the optimal execution) so we do not
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
47
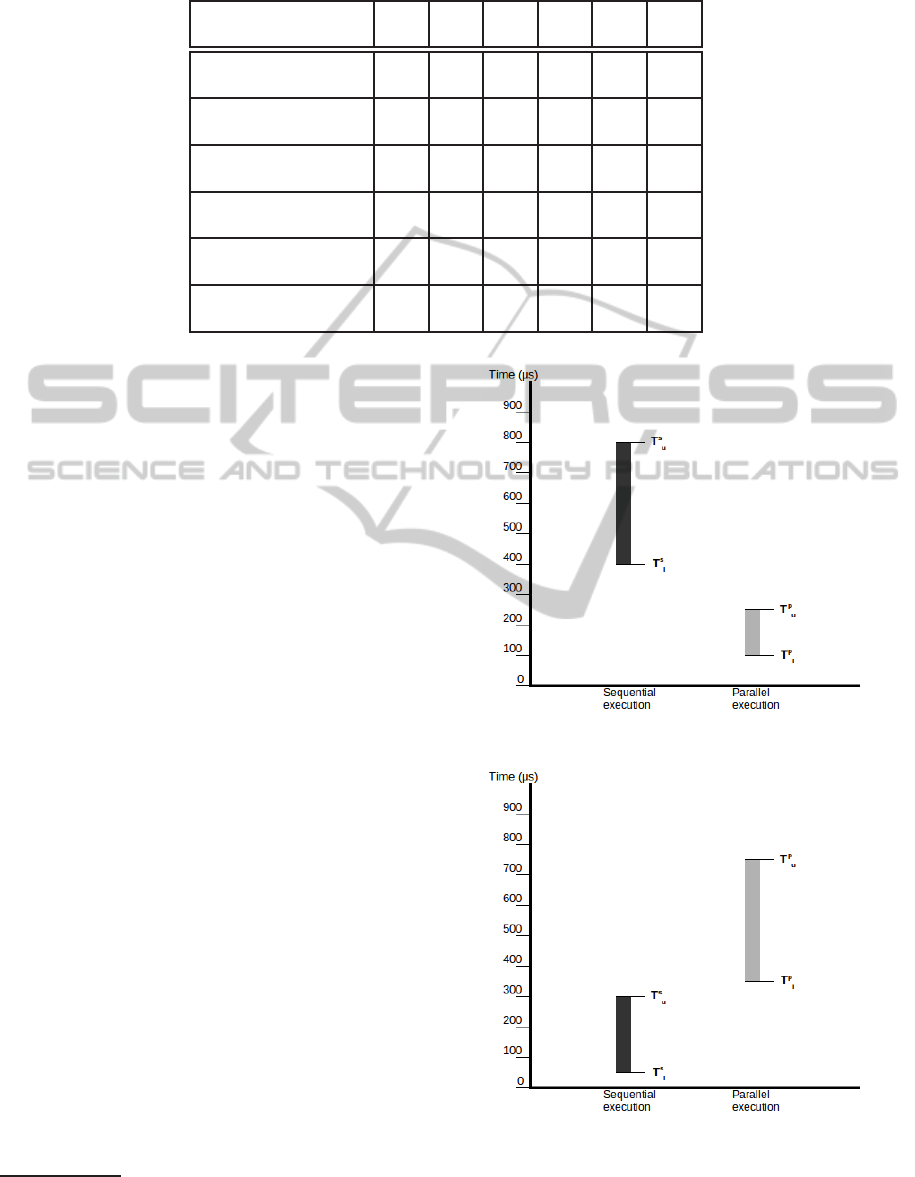
Table 2: Benchmark program execution times (in microseconds).
X
X
X
X
X
X
X
X
X
X
Program
Time
T
l
s
T
m
s
T
u
s
T
l
p
T
m
p
T
u
p
p1 400 600 800 100 175 250
(Figure 2)
p2 50 175 300 350 550 750
(Figure 3)
p3 250 525 800 300 375 450
(Figure 4)
p4 50 150 250 100 325 550
(Figure 5)
p5 200 400 600 200 325 450
(Figure 6)
p6 150 325 500 100 275 450
(Figure 7)
show the rest of the tested operations
1
in the results.
We have seen how the three t-conorms max (max),
Lukasiewicz (dluka) and sum (dprod) have the same
behavior. Thus, in order to chose one of these aggre-
gation operators, we have followed the criteria of the
one more efficiently evaluated. In this sense, we have
measured the execution time of evaluating the condi-
tion PAR
1
for each program using the three operators.
These execution times have been obtained over an In-
tel platform (Intel Pentium 4 CPU 2.60GHz). They
are shown in Table 1. The first column shows the
name of the program (see Table 2) and the three next
ones, the aggregation operators. Each row shows the
execution time (in microseconds) of the evaluation of
the condition PAR
1
(see Table 3) for the program us-
ing the three mentioned operators. The last row con-
tains, for each operator, an average value on the exe-
cution time of evaluating such condition for all the
programs. As we can see, the results are very simi-
lar for the aggregation operators max and dluka while
for dprod are almost always bigger. Although max is
a little bit less efficient (on average) than dluka, max
seems to be the best option due to its simplicity.
The whole set of proposed certainty factors and
the results for each approach are shown in Table 3.
They correspond to the case of parallelizing a sequen-
tial program (i.e., where the action taken by default
when there is no evidence towards executing is pa-
rallel is to execute sequentially). The first column
shows the name of the program. The second col-
umn shows what would be the right (optimal) deci-
sion about the type of execution that should be per-
formed (either parallel or sequential). The rest of the
columns contain the results of evaluating the condi-
tions. Columns 3 and 4 contain the results obtained
1
The rest of the tested operations are: min, luka and
prod.
Figure 2: Program p1.
Figure 3: Program p2.
ICFC 2010 - International Conference on Fuzzy Computation
48
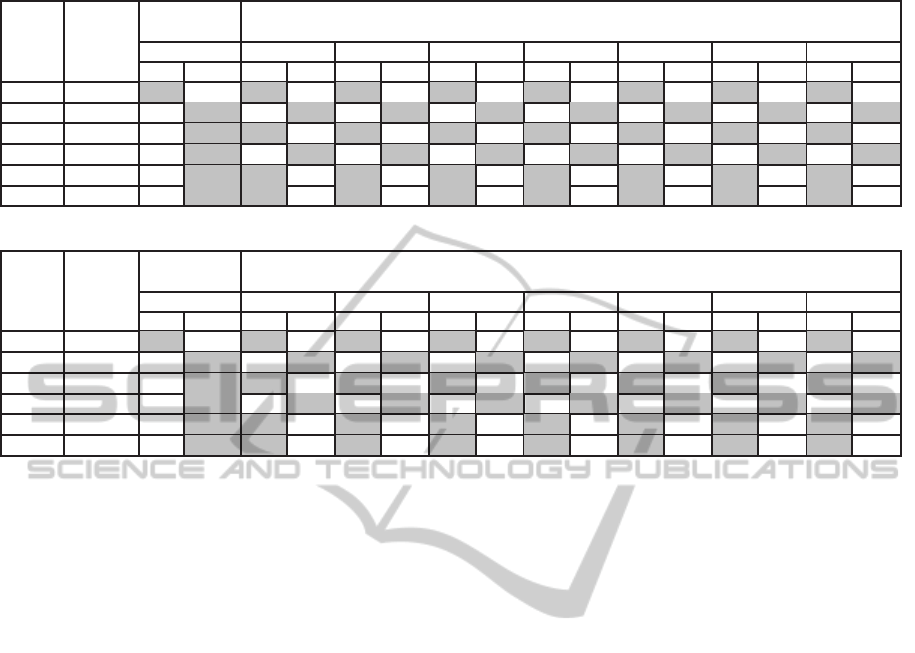
Table 3: Selected executions using the whole set of rules.
Program Optimal
Classical Logic Fuzzy Logic
(Greater) (Quite greater)
Classical Fuzzy 1 Fuzzy 2 Fuzzy 3 Fuzzy 4 Fuzzy 5 Fuzzy 6 Fuzzy 7
PAR
c
SEQ
c
PAR
1
SEQ
1
PAR
2
SEQ
2
PAR
3
SEQ
3
PAR
4
SEQ
4
PAR
5
SEQ
5
PAR
6
SEQ
6
PAR
7
SEQ
7
p1 Parallel 1 0 0.73 0.48 0.73 0.48 0.73 0.48 0.57 0.35 0.57 0.35 0.57 0.35 0.57 0.36
p2 Sequential 0 1 0.48 0.93 0.49 0.93 0.49 0.93 0.34 0.58 0.33 0.59 0.34 0.58 0.31 0.58
p3 Parallel 0 0 0.56 0.54 0.58 0.54 0.58 0.54 0.48 0.44 0.48 0.44 0.48 0.44 0.47 0.44
p4 Sequential 0 0 0.5 0.61 0.5 0.61 0.5 0.61 0.41 0.52 0.41 0.52 0.41 0.52 0.41 0.52
p5 Parallel 0 0 0.54 0.53 0.55 0.53 0.55 0.53 0.47 0.45 0.47 0.45 0.47 0.45 0.47 0.45
p6 Parallel 0 0 0.56 0.52 0.56 0.52 0.56 0.52 0.48 0.45 0.48 0.45 0.48 0.45 0.48 0.45
Program Optimal
Classical Logic Fuzzy Logic
(Greater) (Rather greater)
Classical Fuzzy 1 Fuzzy 2 Fuzzy 3 Fuzzy 4 Fuzzy 5 Fuzzy 6 Fuzzy 7
PAR
c
SEQ
c
PAR
1
SEQ
1
PAR
2
SEQ
2
PAR
3
SEQ
3
PAR
4
SEQ
4
PAR
5
SEQ
5
PAR
6
SEQ
6
PAR
7
SEQ
7
p1 Parallel 1 0 0.62 0.49 0.62 0.49 0.62 0.49 0.53 0.42 0.53 0.42 0.53 0.42 0.54 0.42
p2 Sequential 0 1 0.49 0.72 0.49 0.72 0.49 0.72 0.41 0.54 0.41 0.55 0.41 0.54 0.4 0.54
p3 Parallel 0 0 0.53 0.52 0.54 0.52 0.54 0.52 0.49 0.47 0.49 0.47 0.49 0.47 0.48 0.47
p4 Sequential 0 0 0.5 0.55 0.5 0.55 0.5 0.55 0.45 0.51 0.45 0.51 0.45 0.51 0.45 0.51
p5 Parallel 0 0 0.52 0.51 0.52 0.51 0.52 0.51 0.48 0.47 0.48 0.47 0.48 0.47 0.48 0.47
p6 Parallel 0 0 0.53 0.51 0.53 0.51 0.53 0.51 0.49 0.47 0.49 0.47 0.49 0.47 0.49 0.47
Conditions:
PAR
c
is T
u
p
≤ T
l
s
SEQ
c
is T
u
s
≤ T
l
p
PAR
1
is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
m
s
/T
m
p
))
SEQ
1
is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
m
p
/T
m
s
))
PAR
2
is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
u
s
/T
u
p
))
SEQ
2
is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
u
p
/T
u
s
))
PAR
3
is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
m
s
/T
m
p
),gt(T
u
s
/T
u
p
))
SEQ
3
is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
m
p
/T
m
s
),gt(T
u
p
/T
u
s
))
PAR
4
is rel_hd(0.5∗ hd(T
m
s
,T
m
p
) + 0.25∗ hd(T
u
s
,T
u
p
) + 0.25∗ hd(T
l
s
,T
l
p
))
SEQ
4
is rel_hd(0.5∗ hd(T
m
p
,T
m
s
) + 0.25∗ hd(T
u
p
,T
u
s
) + 0.25∗ hd(T
l
p
,T
l
s
))
PAR
5
is rel_hd((hd(T
m
s
,T
m
p
) + hd(T
u
s
,T
u
p
) + hd(T
l
s
,T
l
p
))/3)
SEQ
5
is rel_hd((hd(T
m
p
,T
m
s
) + hd(T
u
p
,T
u
s
) + hd(T
l
p
,T
l
s
))/3)
PAR
6
is rel_hd(0.25∗ hd(T
m
s
,T
m
p
) + 0.5∗ hd(T
u
s
,T
u
p
) + 0.25∗ hd(T
l
s
,T
l
p
))
SEQ
6
is rel_hd(0.25∗ hd(T
m
p
,T
m
s
) + 0.5∗ hd(T
u
p
,T
u
s
) + 0.25∗ hd(T
l
p
,T
l
s
))
PAR
7
is rel_hd(0.25∗ hd(T
m
s
,T
m
p
) + 0.25∗ hd(T
u
s
,T
u
p
) + 0.5∗ hd(T
l
s
,T
l
p
))
SEQ
7
is rel_hd(0.25∗ hd(T
m
p
,T
m
s
) + 0.25∗ hd(T
u
p
,T
u
s
) + 0.5∗ hd(T
l
p
,T
l
s
))
using the conservative approach, while columns 5-
18 contain the results obtained using our proposed
conditions based on fuzzy logic. Each column in
the later group of columns corresponds to a differ-
ent fuzzy condition. The selected type of execution
(using the process explained in Section 4.1) are high-
lighted. SEQ
i
and PAR
i
are the truth values obtained
for the certainty factors of the sequential and para-
llel executions of the program p
i
. We have performed
the experiments for two different levels of flexibility
using quite_greater and rather_greater respectively.
The decisions made by using the fuzzy conditions are
always the optimal ones for these experiments. How-
ever, the conservative approach (classical logic) dis-
agrees with the optimal ones in half of the cases. For
example, the condition T
u
p
≤ T
l
s
holds for p1 (see Fig-
ure 2). Thus, the parallel execution of p1 is more
efficient than the sequential one. In this case, both
the conservative approach (classical logic) and the
fuzzy logic approach agree in that the execution of p1
should be parallel. The converse condition (T
u
s
≤ T
l
p
)
holds for program p2 (see Figure 3), and thus, the op-
timal action is executing it sequentially. In this case,
also both approaches agree in that the execution of p2
should be parallel.
For programs 3-6, the classical logic truth values
(PAR
c
and SEQ
c
) are always zero, which means that
the suggested type of execution is sequential for all
of these programs (i.e., the default type of executi-
on). However, from Figures 4, 5, 6 and 7, we can see
that in some cases the optimal decision is to execute
these programs in parallel. For example, consider
program p3 (see figure 4). We have that T
u
p
= 450 µs
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
49

Table 4: Progression of decisions using the fuzzy set quite greater.
Execution Optimal
Classical Logic Fuzzy Logic
(Greater) (Quite greater)
Classical Fuzzy 2
PAR
c
SEQ
c
PAR
2
SEQ
2
p3_execution1 Parallel 1 0 0.68 0.49
p3_execution2 Parallel 0 0 0.64 0.5
p3_execution3 Parallel 0 0 0.61 0.52
p3_execution4 Parallel 0 0 0.6 0.53
p3_execution5 Parallel 0 0 0.58 0.54
p3_execution6 Parallel 0 0 0.57 0.56
p3_execution7 Sequential 0 0 0.56 0.57
p3_execution8 Sequential 0 0 0.55 0.58
p3_execution9 Sequential 0 0 0.54 0.6
p3_execution10 Sequential 0 0 0.54 0.61
p3_execution11 Sequential 0 0 0.53 0.62
p3_execution12 Sequential 0 0 0.53 0.64
p3_execution13 Sequential 0 0 0.52 0.65
p3_execution14 Sequential 0 0 0.52 0.66
p3_execution15 Sequential 0 1 0.52 0.68
Conditions:
PAR
c
is T
u
p
≤ T
l
s
SEQ
c
is T
u
s
≤ T
l
p
PAR
2
is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
u
s
/T
u
p
))
SEQ
2
is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
u
p
/T
u
s
))
Figure 4: Program p3.
and T
l
s
= 250 µs, and thus T
u
p
≤ T
l
s
does not hold.
The decision of executing p3 sequentially made by
classical logic is safe. However, in this case, since
T
u
s
= 800 µs, assuming that p3 is run a significant
number of times, we have that on average, executing
p3 in parallel would be more efficient than executing
it sequentially. In contrast, our proposed fuzzy ap-
proach selects the optimal type of execution for p3: its
two subtasks should be executed in parallel. Program
Figure 5: Program p4.
p4 (see figure 5) represents the opposite case. In this
case T
u
s
= 250 µs and T
l
p
= 100 µs so T
u
s
≤ T
l
p
does not
hold. But in this case T
u
p
= 550 µs and T
u
s
= 250 µs.
Thus, the best choice seems to be executing p4 se-
quentially. This is the type of execution suggested
by our fuzzy conditions. However, using classical
logic, the selected execution is sequential (the one se-
lected by default when none of the sufficient condi-
tions PAR
c
nor SEQ
c
hold). However, our fuzzy logic
ICFC 2010 - International Conference on Fuzzy Computation
50

Figure 6: Program p5.
Figure 7: Program p6.
conditions provide enough evidences that support the
decision of executing in parallel.
In the situations illustrated by the last two pro-
grams it is not so clear what type of execution should
be selected. For program p5 we have that T
u
p
= 450 µs
and T
l
s
= 200 µs. Thus, since the sufficient condi-
tion T
u
p
≤ T
l
s
for executing in parallel does not hold,
it seems that the program should be executed sequen-
tially. However, since T
l
p
= 200 µs and T
u
s
= 600 µs,
the sufficient condition T
u
s
≤ T
l
p
for executing in pa-
rallel does not hold either. Now, using our fuzzy logic
approach, taking the four values T
l
p
,T
u
p
,T
l
s
and T
u
s
into account, a certainty factor of nearly 0.5 suggests
that the best choice is to execute p5 in parallel.
For program p6 (see figure 7), none of the suffi-
cient conditions T
u
p
≤ T
l
s
and T
u
s
≤ T
l
p
(for selecting
parallel and sequential execution respectively) hold.
However, since T
u
p
≤ T
u
s
and T
l
p
≤ T
l
s
hold, it is clear
that the execution time of the sequential execution is
going to belong to an interval whose limits are big-
ger than the limits of the parallel execution. Thus,
is it more likely that the execution time of the para-
llel execution be less than the execution time of the
sequential one, so that the right decision seems to ex-
ecute p6 in parallel. We can see that our proposed
fuzzy conditions also suggests the parallel execution.
Finally, we can see that in those cases in which
classical logic suggests a type of execution (with truth
value 1), our fuzzy logic approach suggests the same
type of execution (sequential or parallel).
5.3 Selected Fuzzy Model
Table 3 shows that all the fuzzy conditions (Fuzzy 1-
7) select the same type of execution, sequential or
parallel (independently of the fuzzy set used, either
quite_greater or rather_greater). Our goal is to de-
tect those situations where the parallel execution is
faster than the sequential one, such that a conserva-
tive (safe) approach is not able to detect it but the
fuzzy approach is. Approaches Fuzzy 4, 5, 6 and
7 suggest parallel execution with less evidence than
Fuzzy 1, 2 and 3 for both fuzzy sets (quite_greater
and rather_greater). As we are interested in suggest-
ing to execute in parallel with evidences as bigger as
possible we rule out this subset of conditions and we
focus our attention in the first set. Both Fuzzy 2 and 3
obtain the same values in all cases. Furthermore they
provide higher evidences for parallel execution than
the condition Fuzzy 1. This fact can be seen in pro-
grams p3, p5 and p6. As Fuzzy 2 is a subset of Fuzzy
3, evaluating the first one is more efficient than the
second one (the Fuzzy 3 condition has one more com-
parison). Thus, the condition that we have selected is
Fuzzy 2:
PAR is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
u
s
/T
u
p
))
This condition obtains a better average case behav-
ior by relaxing decision conditions (and losing some
precision). There may be cases in which our ap-
proach will select the slowest execution, however it
will select the fastest one in a bigger number of cases.
This tradeoff between safety and efficiency makes this
new approach only applicable to non-critical systems,
where no constraints about execution times must be
met, and a wrong decision will only cause a slow-
down which is admissible. In the same way that it
happens in the conservative approach, the fuzzy ap-
proach for sequentializing a parallel program is also
symmetric to the problem of parallelizing a sequen-
tial program. The condition that we have selected for
sequentializing a parallel program is:
SEQ is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
u
p
/T
u
s
))
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
51

5.4 Decisions Progression
Focusing on program p3 and using the fuzzy set
quite_greater with the selected fuzzy model (in Sec-
tion 5.3) we have developed an incremental experi-
ment whose results are shown in Table 4. The main
goal is to see how with this fuzzy logic approach
we can select the optimal execution in those cases in
which the conservative approach is not able to give a
conclusion, and also, how our fuzzy logic approach
detects all situations (safely) detected optimal by the
conservative approach. Figure 8 shows all the exe-
cution scenarios. The sequential execution times are
fixed, while the parallel execution ones depend on
each scenario. The later are represented by pairs
(T
l
p
(i),T
u
p
(i)) where i is the concrete case. The pa-
rallel execution times of each scenario are the times
of the previous one plus 50 units, in order to appre-
ciate the progression. The times of the first scenario
are T
l
p
(1) = 100 µs and T
u
p
(1) = 250 µs. Attending to
classical logic we can see how only when PAR
c
= 1
or SEQ
c
= 1 we obtain a justified answer (that the
program must be executed in parallel or sequentially
respectively). In the rest of the cases the selected type
of execution is sequential by default, since we are
following the philosophy of parallelizing a sequential
program, and there are no evidences towards either
type of execution. On the other hand, fuzzy logic al-
ways selects the optimal execution (supported by evi-
dences).
5.5 Experiments with Real Programs
The former experiments (Section 5.2) have shown that
our fuzzy granularity control framework is able to
capture which is the optimal type of execution on av-
erage. Moreover, in order to ensure that our approach
can be applied in practice, we have performed some
experiments with real programs (and real execution
times). The experimental assessment have been made
over an UltraSparc-T1, 8 cores x 1GHz (4 threads per
core), 8GB of RAM, SunOS 5.10.
We have tested the fuzzy model selected in Sec-
tion 5.3, so that only upper and lower bounds on (pa-
rallel and sequential) execution times were needed.
Sequential execution times have been measured di-
rectly over the execution platform (executing the
worst and best possible cases) while the parallel ones
have been estimated.
The number of cores of the processor is denoted
as p, the number of tasks (candidates for parallel or
sequential execution) as n, and the relation ⌈n/p⌉ is
denoted as k. We consider two different overheads
of parallel execution: (a) the time needed for creat-
Table 5: Real programs for experimental assessment.
Qsort qsort(n) sorts a list of n random elements.
Fib fib(n) obtains the nth Fibonacci number.
Hanoi hanoi(n) solves Hanoi puzzle with 3 rods
and n disks.
ing n parallel tasks, called Create(n), and (b) an upper
bound on the time taken from the point in which a pa-
rallel subtask g
i
is created until its execution is started
by a processor, denoted as SysOverhead
i
. Both types
of overheads have been experimentally measured for
the execution platform. For the first one, we have
measured directly the time of creating p threads. The
second one has been obtained by using the expression
(S/2) − P, where S and P are the measured execu-
tion times of a program consisting of two perfectly
balanced tasks running with one and two threads re-
spectively.
There are different ways of executing a task in pa-
rallel depending on the scheduling. The highest pa-
rallel execution time will be the one with the worst
scheduling (i.e., the one in which the cores are idle as
much as possible). Consider a task g = g
1
,...,g
n
such
that subtasks g
1
,...,g
n
are candidates for parallel exe-
cution. Assume that Ts
i
represents the cost (execution
time) of the execution of subtask g
i
. Assume also that
Ts
1
,Ts
2
,...,Ts
n
are in descending order of cost and
that an ideal parallel execution environment has no
parallel execution overheads. Then, we can estimate
T
l
p
and T
u
p
as follows:
T
l
p
= T
l
s
/p (1)
T
u
p
= Create(p) +
k
∑
i=1
(SySoverhead
i
+ T
u
s
i
) (2)
Table 6 shows the experimental results. The first
four columns show the same information as in Ta-
ble 3, although in this table Program refers to the
benchmarks in Table 5. For space reasons, Table 6
only shows results for a subset of inputs. In particu-
lar, Fibonacci and Hanoi have been tested with the set
of inputs {1,18} and {1,14} respectively. The assess-
ment of the fuzzy approach proposed in this paper is
similar for the whole set of tested inputs. The last row
shows the speedup of our fuzzy approach with respect
to the conservative approach: speedup =
T
c
T
f
, where
T
c
is the time of the selected execution using the con-
servative approach and T
f
is the time of the selected
execution using our fuzzy approach. A positive value
of speedup means that the execution selected with our
approach is faster than the one selected by the conser-
vative approach.
ICFC 2010 - International Conference on Fuzzy Computation
52

Figure 8: Progression of executions of the example program p3.
Our fuzzy conditions obtain, in the worst case, the
same results (Speedup = 1.0) than the conservative
one. In the rest of the cases, it improves the perfor-
mance of the conservative approach.
We can distinguish two main sets of cases in Ta-
ble 6: one set made up of qsort and the other set made
up of fib and hanoi. In the first set the upper bound
on the sequential execution time is different from the
lower bound, while in the second set both bounds are
the same. Our approach improves the conservative
one in the first set of cases, whereas in the second set,
it provides the same performance than the conserva-
tive approach. This is understandable, since the exe-
cution time for the first set of cases not only depends
on the length of the input list, but also on the values of
its elements. Thus, for a given list length, there may
be different execution times, depending on the actual
values of the lists with such length. However, in the
second set of cases, the execution time only depends
on the size (using the integer value metric) of the in-
put argument, and all executions for the same input
data size take the same execution time.
6 CONCLUSIONS
We have applied fuzzy logic to the program optimiza-
tion field, in particular, to automatic granularity con-
trol in parallel/distributed computing. We have de-
rived fuzzy conditions for deciding whether to exe-
cute some tasks in parallel or sequentially, using in-
formation about the cost of tasks and parallel executi-
on overheads.
We have performed an experimental assessment of
the fuzzy conditions and identified the ones that have
the best average case behavior. We have also com-
pared our proposed fuzzy conditions with existing
sufficient (conservative) ones for performing granu-
larity control. Our experiments showed that the pro-
posed fuzzy conditions result in better program opti-
mizations (on average) than the conservative condi-
tions. The conservative approach ensures that exe-
cution decisions will never result in a slowdown, but
loses some parallelizations opportunities (and thus,
no speedup is obtained). In contrast, the fuzzy ap-
proach makes a better use of the parallel resources
and although fuzzy conditions can produce slowdown
for some executions, the whole computation benefits
from some speedup on average (always preserving
correctness). Of course, the fuzzy approach is appli-
cable in scenarios where the no slowdown property is
not needed, as for example video games, text proces-
sors, compilers, etc.
Experiments performed with real programs (and
real execution times) have demonstrated that our ap-
proach can be successfully applied in practice. We
intend to perform a more rigorous and broad assess-
ment or our approach, by applying it to large real life
programs and using fully automatic tools for estimat-
ing execution times.
Although a lot of work still remains to be done,
the preliminary results are very encouraging and we
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
53
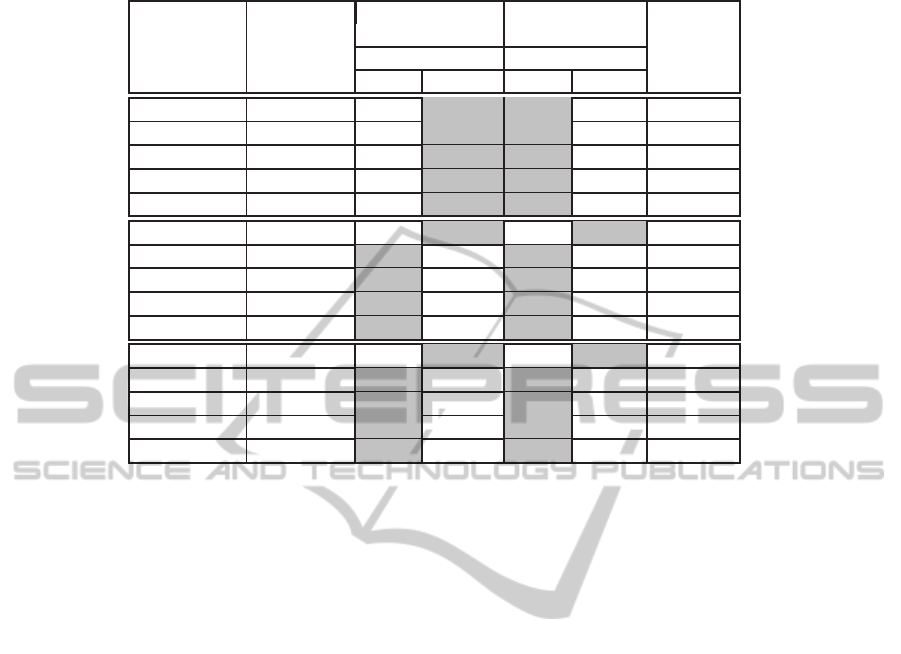
Table 6: Selected executions for real programs.
Execution Optimal
Classical Logic Fuzzy Logic
Speedup(Greater) (Quite greater)
Classical Fuzzy 2
PAR
c
SEQ
c
PAR
2
SEQ
2
qsort(250) Parallel 0 0 0.6 0.53 1.66
qsort(500) Parallel 0 0 0.6 0.53 1.74
qsort(750) Parallel 0 0 0.6 0.53 1.74
qsort(1000) Parallel 0 0 0.6 0.53 1.75
qsort(1250) Parallel 0 0 0.6 0.53 1.71
fib(1) Parallel 1 1 0.53 0.53 1.0
fib(3) Sequential 1 0 0.6 0.5 1.0
fib(5) Parallel 1 0 0.6 0.5 1.0
fib(7) Parallel 1 0 0.6 0.5 1.0
fib(12) Parallel 1 0 0.6 0.5 1.0
hanoi(1) Parallel 1 1 0.53 0.53 1.0
hanoi(2) Sequential 1 0 0.6 0.5 1.0
hanoi(3) Sequential 1 0 0.6 0.5 1.0
hanoi(4) Sequential 1 0 0.6 0.5 1.0
hanoi(5) Sequential 1 0 0.61 0.5 1.0
Conditions:
PAR
c
is T
u
p
≤ T
l
s
SEQ
c
is T
u
s
≤ T
l
p
PAR
2
is max(gt(T
l
s
/T
u
p
),gt(T
l
s
/T
l
p
),gt(T
u
s
/T
u
p
))
SEQ
2
is max(gt(T
l
p
/T
u
s
),gt(T
l
p
/T
l
s
),gt(T
u
p
/T
u
s
))
believe that it is possible to exploit all the potential
offered by multicore systems by applying fuzzy logic
to automatic program parallelization techniques.
ACKNOWLEDGEMENTS
This research has been partially funded by the EU
7th. FP NoE S-Cube 215483, FET IST-231620 HATS,
MICINN TIN-2008-05624 DOVES and CM project
P2009/TIC/1465 PROMETIDOS. Teresa Trigo has
been supported by CAM grant CPI/0621/2008.
REFERENCES
Baldwin, J. F., Martin, T., and Pilsworth, B. (1995). Fril:
Fuzzy and Evidential Reasoning in Artificial Intelli-
gence. John Wiley & Sons.
Chassin, J. and Codognet, P. (1994). Parallel Logic Pro-
gramming Systems. Computing Surveys, 26(3):295–
336.
Debray, S. K., Lin, N.-W., and Hermenegildo, M. (1990).
Task Granularity Analysis in Logic Programs. In
Proc. of the 1990 ACM Conf. on Programming Lan-
guage Design and Implementation, pages 174–188.
ACM Press.
Guadarrama, S., Muñoz, S., and Vaucheret, C. (2004).
Fuzzy Prolog: A new Approach Using Soft Con-
straints Propagation. Fuzzy Sets and Systems, FSS,
144(1):127–150. ISSN 0165-0114.
Hermenegildo, M., Puebla, G., Bueno, F., and López-
García, P. (2005). Integrated Program Debugging,
Verification, and Optimization Using Abstract Inter-
pretation (and The Ciao System Preprocessor). Sci-
ence of Computer Programming, 58(1–2):115–140.
Hermenegildo, M. and Rossi, F. (1995). Strict and Non-
Strict Independent And-Parallelism in Logic Pro-
grams: Correctness, Efficiency, and Compile-Time
Conditions. Journal of Logic Programming, 22(1):1–
45.
Hermenegildo, M. V., Bueno, F., Carro, M., López, P.,
Morales, J., and Puebla, G. (2008). An Overview
of The Ciao Multiparadigm Language and Program
Development Environment and its Design Philosophy.
In Festschrift for Ugo Montanari, number 5065 in
LNCS, pages 209–237. Springer-Verlag.
Huelsbergen, L. (1993). Dynamic Language Parallelization.
Technical Report 1178, Computer Science Dept. Univ.
of Wisconsin.
Huelsbergen, L., Larus, J. R., and Aiken, A. (1994). Using
ICFC 2010 - International Conference on Fuzzy Computation
54

Run-Time List Sizes to Guide Parallel Thread Cre-
ation. In Proc. ACM Conf. on Lisp and Functional
Programming.
Ishizuka, M. and Kanai, N. (1985). Prolog-ELF incorporat-
ing fuzzy logic. In IJCAI, pages 701–703.
Kaplan, S. (1988). Algorithmic Complexity of Logic Pro-
grams. In Logic Programming, Proc. Fifth Interna-
tional Conference and Symposium, (Seattle, Washing-
ton), pages 780–793.
Kruatrachue, B. and Lewis, T. (1988). Grain Size Determi-
nation for Parallel Processing. IEEE Software.
Lee, R. (1972). Fuzzy logic and the resolution principle.
Journal of the Association for Computing Machinery,
19(1):119–129.
Li, D. and Liu, D. (1990). A Fuzzy Prolog Database System.
John Wiley & Sons, New York.
López-García, P., Hermenegildo, M., and Debray, S. K.
(1996). A Methodology for Granularity Based Con-
trol of Parallelism in Logic Programs. Journal of Sym-
bolic Computation, Special Issue on Parallel Symbolic
Computation, 21(4–6):715–734.
McGreary, C. and Gill, H. (1989). Automatic Determina-
tion of Grain Size for Efficient Parallel Processing.
Communications of the ACM, 32.
Mera, E., López-García, P., Carro, M., and Hermenegildo,
M. (2008). Towards Execution Time Estimation in
Abstract Machine-Based Languages. In 10th Int’l.
ACM SIGPLAN Symposium on Principles and Prac-
tice of Declarative Programming (PPDP’08), pages
174–184. ACM Press.
Muñoz-Hernández, S., Pablos-Ceruelo, V., and Strass, H.
(2009). Rfuzzy: An expressive simple fuzzy compiler.
In IWANN (1), pages 270–277.
Pablos-Ceruelo, V., Muñoz-Hernández, S., and Strass,
H. (2009a). Rfuzzy framework. Paper pre-
sented at the 18th Workshop on Logic-based Methods
in Programming Environments (WLPE2008), CoRR,
abs/0903.2188.
Pablos-Ceruelo, V., Strass, H., and Muñoz Hernández,
S. (2009b). Rfuzzy—a framework for multi-adjoint
fuzzy logic programming. In Fuzzy Information Pro-
cessing Society, 2009. NAFIPS 2009. Annual Meeting
of the North American, pages 1–6.
Rabhi, F. A. and Manson, G. A. (1990). Using Complexity
Functions to Control Parallelism in Functional Pro-
grams. Res. Rep. CS-90-1, Dept. of Computer Sci-
ence, Univ. of Sheffield, England.
Strass, H., Muñoz-Hernández, S., and Pablos-Ceruelo, V.
(2009). Operational semantics for a fuzzy logic pro-
gramming system with defaults and constructive an-
swers. In IFSA/EUSFLAT Conf., pages 1827–1832.
Vaucheret, C., Guadarrama, S., and Muñoz, S. (2002).
Fuzzy Prolog: A Simple General Implementation us-
ing CLP(R). In 9th International Conference on Logic
for Programming Artificial Intelligence and Reason-
ing, Tbilisi, Georgia.
Zhong, X., Tick, E., Duvvuru, S., Hansen, L., Sastry,
A., and Sundararajan, R. (1992). Towards an Effi-
cient Compile-Time Granularity Analysis Algorithm.
In Proc. of the 1992 International Conference on
Fifth Generation Computer Systems, pages 809–816.
Institute for New Generation Computer Technology
(ICOT).
TOWARDS FUZZY GRANULARITY CONTROL IN PARALLEL/DISTRIBUTED COMPUTING
55
