
PERFORMANCE COMPARISON OF A BIOLOGICALLY INSPIRED
EDGE DETECTION ALGORITHM ON CPU, GPU AND FPGA
Patrick Dempster, Thomas. M. McGinnity, Brendan Glackin and Qingxiang Wu
Intelligent Systems Research Center, University of Ulster, Northland Road, Derry, U.K.
Keywords:
SNN, FPGA, GPU, CUDA, CPU, Multithreaded, SNN, Bio-inspired.
Abstract:
Implementation of Spiking neural networks (SNNs) are becoming an important computational platform for
bio-inspired engineers and researchers. However, as networks increase in size towards the biological scale.
Ever increasing simulation times are becoming a substantial problem. Efforts to simulate this problem have
been many and varied. Modern Graphic Processing Units (GPUs) are increasingly being employed as a plat-
form, whose parallel array of streaming multiprocessors (SMs) allow many thousands of lightweight threads
to run. This paper presents a GPU implementation of an SNN application which performs edge detection. The
approach is then compared with an equivalent implementations on an Intel Xeon CPU and an FPGA system.
The GPU approach was found to provide a speed up of 1.37 times over the FPGA version and an increase of
23.49 times when compared with the CPU based software simulation.
1 INTRODUCTION
Neuroscientists and computer engineer strive to de-
velop systems which take as their inspiration the most
advanced processing system on the planet, namely the
human brain. The human brain is a hugely complex,
massively parallel processor which is estimated to
have in the region of 10
11
neurons with an estimated
10
14
connections between them (Khan et al., 2008).
A neuron is the basic processing element of the brain,
with different models available such as the conduc-
tance based integrate and fire (Maguire et al., 2007),
Izhikevich (Izhikevich, 2003), and Hodgkin Huxley
(Gerstner and Kistler, 2002). Each of these provide
a mathematical model which, to varying degrees of
complexity, attempt to account for the complex be-
haviour which is observed when studying the brains
functionality. Spiking neural networks (SNNs) are
emerging as a paradigm, which have the potential to
create biologically plausible systems (Glackin et al.,
2009b). Unlike artificial neuron networks (ANNs),
SNNs use timing of the spikes to convey information
and perform computations.
Networks of SNNs, tend to be highly parallel sys-
tems which when simulated on conventional CPU
based systems are executed sequentially. As tradi-
tional CPUs process information in a a sequential
fashion this can cause simulation times to be signif-
icant (Khan et al., 2008). Simulation times will in-
crease as emulated systems move towards biological
scale, despite the increasing power of conventional
CPUs. An approach currently used to increase the
number of neurons and synapses which can be sim-
ulated, while decreasing simulation time is that of
parallel systems. Leveraging these parallel systems,
which include beowolf clusters, super-computers,
neuromorphic hardware, FPGAs and GPUs to take
advantage of the parallel nature of their computa-
tion to accelerate simulation. Recently developed
GPUs which include support for parallell program-
ming include IBM’s cell processor, Nvidia’s Telsa
class CUDA capable GPUs and ATI Stream Proces-
sors.
This paper will present work which has used an
Nvidia based GPU to decrease the time required to
implement and evaluate an SNN network designed
to perform biologically inspired edge detection on
an image. Section 2 Provides an introduction to the
Compute Unified Device Architecture (CUDA) which
is a current approach to programming NVIDIA graph-
ics processing units (GPUs). Section 3 will providean
overview of the SNN application that was used to test
the performance of the CUDA GPU approach. Sec-
tion 4 will report on the experimental results obtained
from the implementation of the SNN on the CUDA
hardware, a previously reported FPGA implementa-
tion and a CPU implementation. Section 5 outlines
some initial conclusions of this work and the direction
420
Dempster P., M. Mcginnity T., Glackin B. and Wu Q..
PERFORMANCE COMPARISON OF A BIOLOGICALLY INSPIRED EDGE DETECTION ALGORITHM ON CPU, GPU AND FPGA.
DOI: 10.5220/0003078904200424
In Proceedings of the International Conference on Fuzzy Computation and 2nd International Conference on Neural Computation (ICNC-2010), pages
420-424
ISBN: 978-989-8425-32-4
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

of further research which will use GPU based CUDA
programming to explore large scale SNNs, using dif-
ferent bio-inspired neuron models.
2 TESLA GPU’S AS A PLATFORM
FOR PARALLEL PROCESSING
Graphics Processing Units (or GPUs) are a hard-
ware unit traditionally used by PCs to render graph-
ics information to the user. The information pre-
sented by displays has evolved as the power of GPUs
has increased, from the early PC systems which pro-
vided an almost typewriter class monotone display to
immersive 3D displays found in advanced worksta-
tion PCs today. This evolution has lead to the de-
sign, by Nvidia, of modern graphics cards which are
in essence massively multi-threading processors with
high memory bandwidth (Kirk and Hwu, 2010). The
power of GPU has traditionally been used to improve
the appearance of the GUI in computer systems and
to improve the visual quality of games. However,
as interest with in research communities has evolved
to harness the power of parallel systems, GPUs have
been seen as a way to bring huge amounts of process-
ing power to an individual desktop. Nvida have re-
sponded by developing the Compute Unified Device
Architecture (CUDA) which allows programmers to
better leverage the parallel processing capability of
GPUs. In turn this has allowed GPUs to claim a place
within the high performancecomputing family of sys-
tems and also lower the cost of entry from thousands
of pounds to hundreds of pounds.
As a result of the evolution of high performance
graphics systems, there are available Nvidia GPUs
whose characteristics allow for the parallel execution
of multiple thousands of lightweight threads. Re-
searchers are currently working on ways to harness
the power of these lightweight threads, so that they
may be used to simulate many thousands of neurons
on a GPU (Nageswaran et al., 2009).
Nvidia GPUs which can be programmed using
the CUDA, framework typically contain arrays of
Streaming Multiprocessors (SMs), with upto 30 SMs
available on the largest Nvidia Telsa devices. This ca-
pability is paired with upto 4GB of memory, which re-
sults in super computer class performance on desktop
PCs. Each of the Streaming Multiprocessors avail-
able in a Telsa GPU typically contain, eight floating
point Scalar Processors (SPs), a Special function unit
(SFU), a multi-threaded instruction unit, 16KB shared
memory which can be managed by the user, and
16KB of cache memory. GPU also contain a hard-
ware scheduling unit which selects which group of
threads (in Nvidia terminology this is called a ’warp’
of threads) to be run on the SM. If a single thread
within the warp requires access to data which is held
in external memory then the hardware scheduling unit
can mark another warp of threads to run on the SM,
while the data for the thread in the first group is re-
trieved from external memory, thus helping to mask
the memory access time and improve overall perfor-
mance.
3 SNN ARCHITECTURE FOR
EDGE DETECTION
In order to evaluate the potential for simulation per-
formance improvements which may be obtainable
when using GPUs as an acceleration platform, an ap-
plication in emulating neural networks was required.
The application which was selected for comparison
was the ’SNN for edge detection application’ previ-
ously reported by (Wu et al., 2007). This applica-
tion has been subsequently implemented on a field
programmable gate array (FPGA), system which is a
powerful parallel hardware environment. When com-
bined with a powerful novel reconfigurable architec-
ture (Glackin et al., 2009a), this architecture showed
impressive speed increases. Over an order of mag-
nitude speed increase was recorded increase over a
similar CPU based implementation of the SNN edge
detection application when running on a Intel Xeon
class processor. The SNN architecture of this appli-
cation will now be briefly described in the rest of this
section.
The principle upon which the SNN application
was designed is to use receptive fields tuned to up,
down, left, right orientations to detect the edges con-
tained within the SNN input image.
As can be seen in figure 1 the edge detection ap-
plication contains a number of ’layers’. In ’Recep-
tor layer’ each node represents the current value ob-
tained when converting the pixel value at the corre-
sponding location in the input image. Each value in
this layer is then forwarded on to the intermediate
layer ’N’, via 5x5 receptive field (RF) weight distri-
butions, such that one excitatory and one inhibitory
field is formed for each orientation direction and are
labelled as ’∆’ and ’X’ respectively. Thus, eight RF
orientations were used RF
up exc
, RF
up inh
, RF
down exc
,
RF
down inh
, RF
left inh
, RF
left exc
, RF
right inh
, RF
right exc
.
Figure 2 shows the weight distribution matrices for
each of the orientation selective receptive fields.
As indicated in figure 3, there are 50 RF connec-
tions from each input pixel in the ’Intermediate’ (fig-
ure 1) layer. Each value in the input layer (x,y) is con-
PERFORMANCE COMPARISON OF A BIOLOGICALLY INSPIRED EDGE DETECTION ALGORITHM ON CPU,
GPU AND FPGA
421
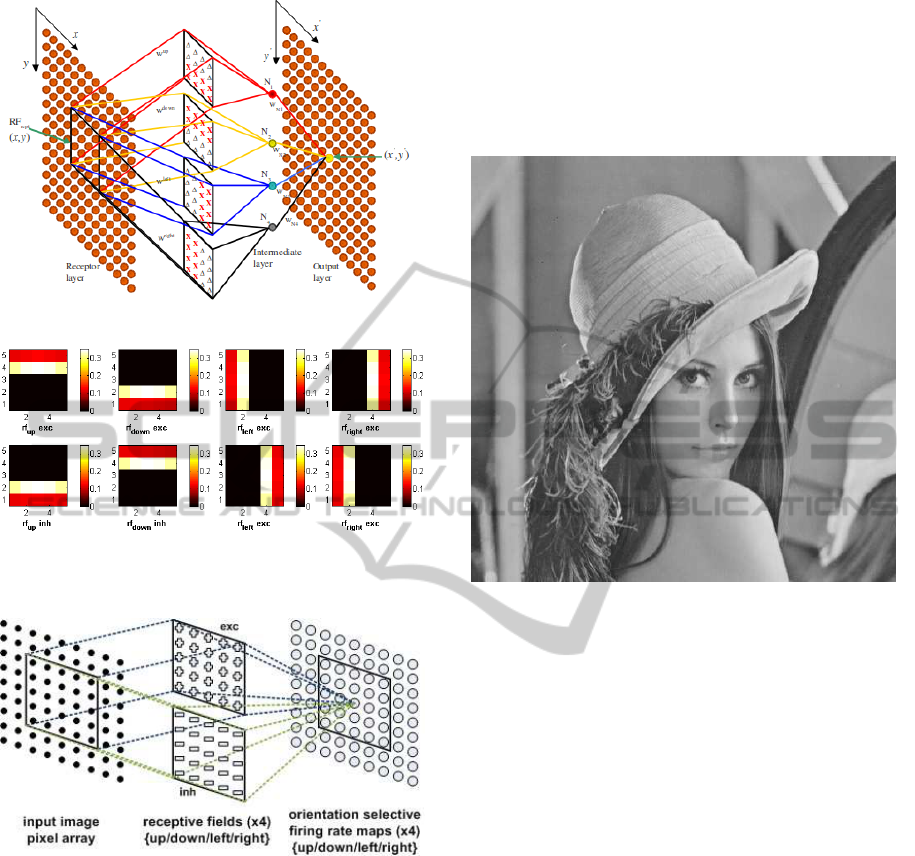
Figure 1: SNN Model for Edge Detection (Wu et al., 2007).
Figure 2: RF edge orientated weight distributions (Glackin
et al., 2009a).
Figure 3: SNN architecture for edge detection (Glackin
et al., 2009a).
nected to the layer (x,y) while being combined with
the neighbouring pixels via the 5x5 matrix.
In order to generate the final output layer which
represents the output image, each intermediate layer
N
1...4
is overlaid. Thus, each pixel in the final output
layer represents the number of times that each of the
neurons in an intermediate layer produced an output
spike during the simulation period.
This section of the paper has given the reader a
general overview of the SNN edge detection archi-
tecture which has been implemented for comparison
purposes. A significantly more detailed and compre-
hensive description of the SNN application has been
presented (Wu et al., 2007).
4 RESULTS
The conductance based integrate and fire model for
spiking neurons has been used. For a detailed de-
scription of the conductance based model the reader
is referred to (Maguire et al., 2007).
Figure 4: Input image.
In order to test the GPU implementation against
the FPGA and CPU software implementations it was
necessary to select the same input image as has been
used previously ie the well known, ’Lena’ image. The
actual ’Lena’ image shown in figure 4 which was used
has a resolution of 512x512 pixels, which when ap-
plied to the SNN edge detection application requires
1.05x10
6
conductance based integrate and fire neu-
rons and 52.4x10
6
synapse’s.
Begin
Load input image
Determine image size
Convert pixel values
Apply RF field
Allocate and initialise memory on GPU
Copy to the GPU
For each timestep do,
<<< Execute Orientation
Selective kernels >>>
Execute Output stage kernel
Copy output data from the GPU
Free GPU memory
Save output image
End
Outlined above is the basic implementation flow
for the SNN application. As can been seen there are
a number of steps which will only be executed once
during the lifetime of the program and in terms of
ICFC 2010 - International Conference on Fuzzy Computation
422
time spent implementing versus performance gained,
they where not considered as initial targets for the op-
timization effort. However, as the intermediate (Ori-
entation Selective) section of the code is executed at
every time step and the spiking neurons can typically
take advantage of parallel platforms, this element of
the algorithm was deemed a good target for the op-
timization effort. For each of the eight orientation
selective maps discussed in section 3, a CUDA ker-
nel was implemented. The SNN application was then
profiled on a standard desktop PC which contained an
Nvidia C1060 card with 4GB of DDR3 memory and
240 scalar processors. As shown in Table 1 the GPU
was able to provide a 23.49 times speed increase over
CPU version and a 1.37 times increase over the FPGA
version.
Table 1: SNN simulation times using 512x512 image.
Implementation Computation time Speed up
Nvidia C1060 5.109 Secs n / a
FPGA Platform 7 Secs 1.37x
Intel Xeon 2.6 Ghz 120 Secs 23.49x
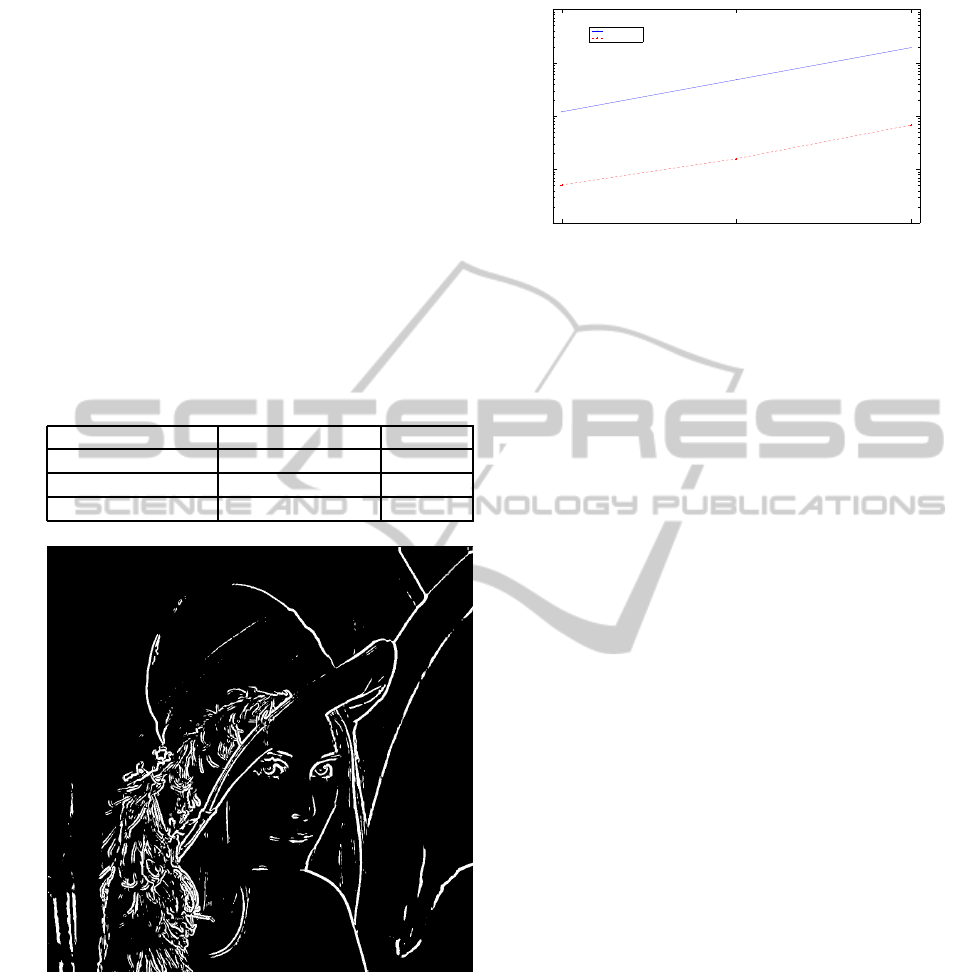
Figure 5: Output image.
The approach used to validate the GPU based im-
plementation was to compare the output image shown
in figure 5 with the equivalent image produced by the
FPGA and CPU implementations. When the output
images where compared both visually and program-
matcially they where found to be identical.
Additionally once the implementations where
evaluated and found to produce identical output re-
sults, it was decided to increase the number of neu-
rons which would be simulated. However, due to
1.05 4.2 16.8
10
0
10
1
10
2
10
3
10
4
Million Neurons Simulated
Simulation time (seconds)
CPU Simulation
GPU Simulation
Figure 6: CPU v GPU simulation times.
memory limitations on the FPGA it wasn’t possible to
simulate the increased network sizes. Figure 6 shows
the simulation runtime times as the number of neu-
rons was increased from approximately 1 Million to
16.8 Million. As can deduced from the graph even
with the GPU simulating 16.8 million neurons, the
simulation time is still only around 65% of the time
required for 1 million neurons on a CPU.
5 CONCLUSIONS
The edge detection algorithm described in (Wu et al.,
2007) has been reimplemented using a C1060 based
card from the NVIDIA family of graphic process-
ing units, using the CUDA API as the program-
ming model. The NVIDIA GPU approach has been
show to provided a speed-up of 23.49 times over the
Intel Xeon CPU based implementation as reported
(Glackin et al., 2009a) and a performance improve-
ment of 1.37 times when compared with the novel
custom FPGA platform reported in (Glackin et al.,
2009a).
Further work will investigate further reducing the
runtime while increasing the size of the image that
can be processed and thus increasing the number of
neurons required for implementation, as well as ex-
ploring both improved SNN architectures and more
complex neuron models such as the Hodgkin Huxley
model (Gerstner and Kistler, 2002) and the Izhike-
vich model (Izhikevich, 2003). The more complex
biologically plausible models have not been as widely
used within the bio-inspired application area, due to
the computationally expensive nature of their imple-
mentation. It is hoped that the massive computational
power provided by the Tesla Nvidia GPU processing
platform can be leveraged to allow engineers a greater
range of exploration within this challenging and excit-
ing research area.
PERFORMANCE COMPARISON OF A BIOLOGICALLY INSPIRED EDGE DETECTION ALGORITHM ON CPU,
GPU AND FPGA
423

ACKNOWLEDGEMENTS
This research is supported under the Centre of Excel-
lence in Intelligent Systems (CoEIS) project, funded
by the Northern Ireland Integrated Development Fund
and InvestNI.
REFERENCES
Gerstner, W. and Kistler, W. M. (2002). Spiking Neu-
ron Models: Single Neurons, Populations, Plasticity.
Cambridge University Press.
Glackin, B., Harkin, J., McGinnity, T., Maguire, L.,
and Wu, Q. (2009a). Emulating Spiking Neural
Networks for Edge Detection on FPGA Hardware.
isrc.ulster.ac.uk.
Glackin, B., Harkin, J., McGinnity, T. M., and Maguire,
L. P. (2009b). A Hardware Accelerated Simulation
Environment for Spiking Neural Networks. In Pro-
ceedings of 5th International Workshop on Applied
Reconfigurable Computing (ARC’09), volume 5453 of
Lecture Notes in Computer Science, pages 336–341.
Izhikevich, E. M. (2003). Simple model of spiking neurons.
IEEE Transactions on Neural Networks, 14:1569–
1572.
Khan, M., Lester, D., Plana, L., Rast, A., Jin, X., Painkras,
E., and Furber, S. (2008). SpiNNaker: mapping neural
networks onto a massively-parallel chip multiproces-
sor. In Proc. 2008 Intl Joint Conf. on Neural Networks
(IJCNN2008), pages 2849–2856.
Kirk, D. B. and Hwu, W.-m. W. (2010). Programming Mas-
sively Parallel Processors. Elsevier.
Maguire, L. P., McGinnity, T. M., Glackin, B., Ghani, A.,
Belatreche, A., and Harkin, J. (2007). Challenges
for large-scale implementations of spiking neural net-
works on FPGAs. Neurocomputing, 71:13–29.
Nageswaran, J. M., Dutt, N., Krichmar, J. L., Nicolau,
A., and Veidenbaum, A. (2009). Efficient simulation
of large-scale spiking neural networks using CUDA
graphics processors. In International conference on
neural networks.
Wu, Q., McGinnity, M., Maguire, L., Belatreche, A., and
Glackin, B. (2007). Edge Detection Based on Spiking
Neural Network Model. In International Conference
on Intelligent Computing, pages 26–34. Springer Ver-
lag.
ICFC 2010 - International Conference on Fuzzy Computation
424
