
AN EFFICIENT IMPLEMENTATION OF A REALISTIC SPIKING
NEURON MODEL ON AN FPGA
Dominic Just, Jeferson F. Chaves, Rogerio M. Gomes and Henrique E. Borges
Intelligent Systems Laboratory, CEFET-MG, Av. Amazonas 7675, Belo Horizonte, MG, CEP 30510-000, Brazil
Keywords:
Spiking neural networks, Field programmable gate array (FPGA), Hardware design.
Abstract:
Hardware implementations of spiking neuron models have been studied over the years mainly in researches
focused on bio-inspired systems and computational neuroscience. This introduced considerable challenges for
researchers particularly in terms of the requirements to realise a efficient embedded solution which may pro-
vide artificial devices adaptability and performance in real-time environment. Thus, programmable hardware
was widely used as a model for the adaptable requirements of neural networks. From this perspective, this
paper describes an efficient implementation of a realistic spiking neuron model on a Field Programmable Gate
Array (FPGA). A network consisting of 10 Izhikevich’s neurons was produced, in a low-cost and low-density
FPGA. It operates 100 times faster than in real time, and the perspectives of these results in newer models of
FPGAs are promising.
1 INTRODUCTION
Hardware implementations of spiking neuron models
have been carried out by several researchers in or-
der to develop systems that present autonomy, such as
robots (Florian, 2006) (Floreano et al., 2006). These
implementations had also as motivation to develop a
model which presents high performance, adaptability
in real-time environment, as well as biological plausi-
bility (Maguire et al., 2007) (Thomas and Luk, 2009).
There are two aspects in the biological back-
ground to be considered: the function and the struc-
ture of the network. Unlike the classical approach of
artificial neural networks, in which these two aspects
are studied together, the present work aims solely to
reproduce the structure of a natural neural network,
according to recent studies. Research on the func-
tional aspect of the neural network is currently carried
on by the authors in other experiments (Soares et al.,
2010).
Studies in neuroscience have revealed, by means
of experimental evidences, that the cortex can be de-
scribed as being organized, functionally, in hierar-
chical levels, where higher levels would coordinate
sets of functions of the lower levels (Edelman, 1987)
(Hadders-Algra, 2000) (Izhikevich et al., 2004) (Fris-
ton, 2010). One of the theories that is in compliance
with these studies is the Theory of Neuronal Group
Selection (TNGS) proposed by Edelman (Edelman,
1987).
TNGS establishes that correlations of the local-
ized neural cells in the cortical area of the brain, gen-
erate clusters units denoted as: neuronal groups (clus-
ter of 50 to 10.000 neural cells), local maps (reen-
trant clusters of neuronal groups) and global maps
(reentrant clusters of neural maps). A neuronal group
(NG) is a set of tightly coupled neurons which fire and
oscillates in synchrony. Each neuron belongs only
to a single neuronal group, which is spatially local-
ized and functionally hyper-specialized. According
to TNGS, NGs are the most basic structures in the
cortical brain, from which memory and perception
processes arise, and can been seen as performing the
most primitive sensory-effector correlations.
Presently, large scale implementations of neurons
based models have been studied mainly on FPGAs.
Thomas and Luk (Thomas and Luk, 2009) developed
a fully-connected network of spiking neurons based
on Izhikevich spiking model that could be simulated
at 100 times real-time speed. However, the synap-
tic weights and the input currents were represented in
fixed-point format using 9 bits. Thus, it is possible to
observe that when a mechanism of plasticity (STDP)
is inserted, the whole structure of the system has to be
changed. In addition, Thomas and Luk used a high-
density FPGA which contributed to the implementa-
tion of a greater number of neurons.
The feasibility of using FPGAs for large-scale
344
Just D., F. Chaves J., M. Gomes R. and E. Borges H..
AN EFFICIENT IMPLEMENTATION OF A REALISTIC SPIKING NEURON MODEL ON AN FPGA.
DOI: 10.5220/0003084303440349
In Proceedings of the International Conference on Fuzzy Computation and 2nd International Conference on Neural Computation (ICNC-2010), pages
344-349
ISBN: 978-989-8425-32-4
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

simulations of the model according to Izhikevich in
(Izhikevich, 2003) was explored in (Rice et al., 2009).
A modularized processing element to evaluate a large
number of Izhikevich’s spiking neurons in a pipelined
manner was developed, which allowed an easy scala-
bility of the model to larger FPGAs. They utilized an
algorithm based character recognition on Izhikevich’s
model for this study. However, this system was not
completely implemented on FPGAs, but some mod-
ules of the algorithm were processes on a computer.
Basically, the aim of the strategy proposed in this
paper is to embed a network of neurons that presents
the same anatomical structure of a neuronal group,
as proposed by Edelman, in a Field Programmable
Gate Array (FPGA). This design is built using floating
point circuits and has provide high-speed processing
speed, i.e., real time processing. Floating point hard-
ware implementations are extremely resource inten-
sive and the number of neurons embedded in FPGA
depends on the efficiency in terms of the used re-
sources.
Real time processing of neuronal groups is also
extremely important in real world applications. Thus,
the implementation proposed in this paper runs a very
accurate simulation of the biological reality.
This high level of biological plausibility is due to
the model of neuron used (Izhikevich, 2004), and due
to the possibility of using any topology by setting the
right parameters, e.g., the synaptic connection matrix.
As a scientific contribution, the present work
presents, as standpoint for the implementation of an
suitable biologically plausible architecture of spiking
neurons. Moreover, as regards to the principles of bi-
ological operations on the coordination structure of
the TNGS, the solution can be applied in the valida-
tion of various hypothesis with which neuroscience is
concerned. This trend have established itself recently
in literature, given the difficulties in performing some
experiments in vitro. Another important contribu-
tion of this paper is the establishment of a technol-
ogy or technique to increase the efficiency of a pro-
grammable logic hardware through the minimization
of the area covered by logical circuits. The benefits
of this research have also contributed to the neuronal
implantation area.
In section 2 we present the neuron model used
in this work. The neuron model should be compu-
tationally simple in order to make this implementa-
tion feasible. The hardware designs developed are
introduced, analyzed and discussed in Section 3. In
addition, this section shows a comprehensive under-
standing of how the circuit works. Finally, Section 4
concludes the paper and presents some relevant exten-
sions of this work.
2 IZHIKEVICH MODEL
According to (Izhikevich, 2007), the biologically
most accurate models of neurons simulate the con-
centrations of several types of ions. The most impor-
tant ions are sodium (Na
+
), potassium (K
+
), calcium
(Ca
2+
) and chloride (Cl
−
). There are two important
mechanisms, which lead to a concentration asymme-
try:
• Passive redistribution: some ions can penetrate
the cell membrane.
• Active transport: ions are pumped into the cell by
ionic pumps.
Both of these mechanisms lead to concentration
gradients. A concentration gradient causes an elec-
tric potential between the inside and the outside of
the cell. In addition, there is one more factor to con-
sider getting a comprehensive model. Since some of
the channels are susceptible to the concentration of
the potential and of the ion concentration, the conduc-
tance of the ionic channels can vary heavily and in a
strong nonlinear way. The Hodgkin-Huxley Model in
(Izhikevich, 2007) summarizes all this effects in one
model of four coupled ordinary differential equations
of first order. This set of differential equations shows
the highly nonlinear behaviour of the whole system.
The Hodgkin-Huxley model is one of the most impor-
tant models of neurons, however, it presents a high
computational cost, limiting the simulation of a net-
work with few neurons.
In contrast, Eugene Izhikevich (Izhikevich, 2003)
developed a model of spiking neurons that reproduces
the behavior of neurons very accurate, but with much
simpler equations and low computational cost, allow-
ing the simulation of networks with large numbers of
neurons. It consists of the following two dimensional
system of one quadratic and one linear differential
equation, each of first order:
v
0
= 0.04v
2
+ 5v + 140 − u + I (1)
u
0
= a(bv − u) (2)
with the after-spike resetting
if v ≥ 30mV, then v = c and u = u + d (3)
In these equations, u and v are the states of the
systems where v represents the membrane potential
of the system and u represents a membrane recov-
ery variable. I is the input current from the outside
world and from other neurons in the network, which
are connected to this neuron. The variables a, b, c,
d are fixed dimensionless parameters. Depending on
these parameters, the Izhikevich model can describe
AN EFFICIENT IMPLEMENTATION OF A REALISTIC SPIKING NEURON MODEL ON AN FPGA
345
regular spiking, intrinsically bursting, chattering, fast
spiking, thalamus-cortical and low-threshold spiking
neurons as well as resonators. Table 1 shows some of-
ten used values for the parameters for the Izhikevich
model.
Table 1: Izhikevich Parameters.
Parameters Typical values Possible values
a 0.02 [0.02;0.1]
b 0.2 [0.2;0.25]
c -65mV [-55;-65]
d 2 [2;8]
For fast computation, Izhikevich suggested a nu-
meric method to simulate the behaviour of spiking
neurons in his publication (Izhikevich, 2003). This
code implements the system of differential equations
by using a Runge-Kutta method and by dividing the
computation of v into two steps. It simulates a net-
work of 1000 neurons fed with a random input circuit
I outside. Having an algorithm, a simulation of a sin-
gle neuron is straightforward.
3 THE HARDWARE DESIGN
The first attempt is a simple mapping of the simpli-
fication of Izhikevich’s MATLAB-code in hardware.
The simplification used looks like following:
(1) a=0.02*ones(10,1); b=0.2*ones(10,1);
(2) c=-65*ones(10,1); d=2*ones(10,1);
(3) S=rand(10,10);
(4) v=-65*ones(10,1); u=b.*v;
(5) for t=1:1000
(6) I_outside=rand(10,1);
(7) fired=find(v>=30);
(8) I_neuron=zeros(10,1);
(9) I_neuron(fired)=1;
(10) v(fired)=c(fired);
(11) U(fired)=u(fired)+d(fired);
(12) I=I_outside+sum(S(:,fired),2);
(13) v=v+0.5*(0.04*v.ˆ2+5*v+140-u+I);
(14) v=v+0.5*(0.04*v.ˆ2+5*v+140-u+I);
(15) u=u+a.*(b.*v-u);
(16) end;
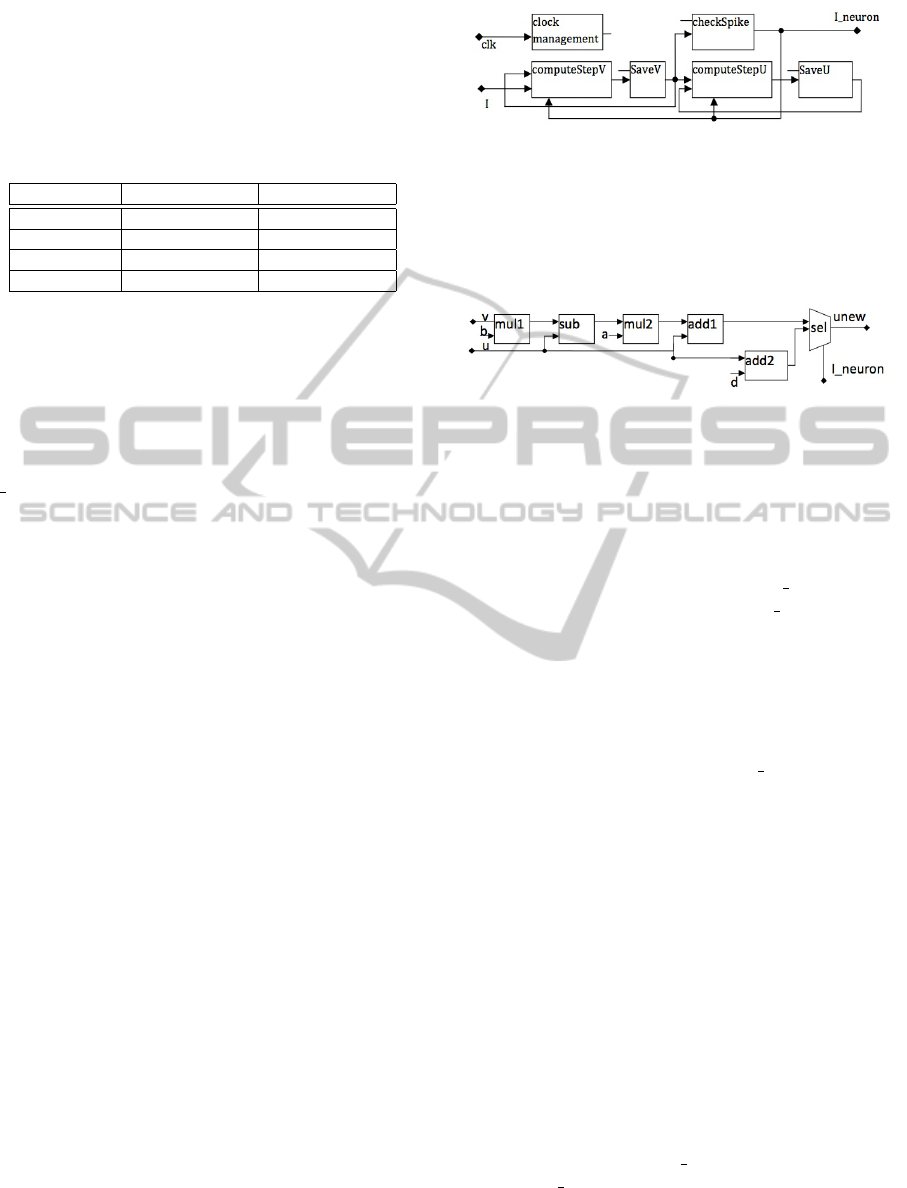
This MATLAB-code is the basic idea for con-
structing an integrated circuit as shown in Figure 1.
This circuit has two registers to store each of the states
v and u. The content of the memory is fed into compu-
tational unit ComputeStepV which performs the op-
erations on line 13 and 14 of the algorithm. Then,
the computational unit ComputeStepU performs the
operations on line 15 in the MATLAB-code. The
computational units support the resetting condition
on lines 10 and 11, too. The component checkSpike
Figure 1: This figure shows the structure of the circuit of
the MATLAB-code. This circuit consists of blocks, which
perform the function v = v +0.5(0.04 v
2
+5v +140− u +I)
with reset condition v = c and the function u = u + a (b v −
u) with reset condition u = u + d. The clock management
controls checkSpike and the registers (indicated with a short
line).
Figure 2: This figure shows the structure of the circuit be-
hind the computeStepU-block in Figure 1. The inputs u and
v are fed into the blocks, which compute step by step the
formula u = u + a (b v − u) with reset condition u = u + d.
A, b and d are constants, which were hard coded in the cir-
cuit.
checks the condition on line 7 on the MATLAB-code.
If there is a spike, it sets the output I outside to 1
according to line 8 and 9. A clock management-
block controls at which time the value of v should be
checked for a spike. It controls as well, at which time
which memory has to be written and at which time
a cycle ends. As there are two computational steps
of v = v + 0.5 (0.04 v
2
+ 5 v + 140 − u + I), this de-
sign can be more efficient by using the block com-
puteStepV twice. Therefore, clock management is
programmed in a way, that the circuit reuses the block
ComputeStepV twice in order to calculate the code on
line 13 twice. To keep the hardware usage small, all
calculations in this project is done with single preci-
sion (32 bit).
To explain how the hardware is designed in de-
tail, Figure 2 shows the block ComputeStepU of Fig-
ure 1. The variables u and v are inputs of the system
and unew is the only output. A closer look into the
function ComputeStepU shows how the actual com-
putation works: In the multiplier mul1, v·b is calcu-
lated. After this the subtracter sub subtracts u from
the prior result. Then, v·b-u is calculated. This re-
sult is fed to the multiplier mul2 and then to the adder
add1. After this, unew is ready. The multiplexer is
needed to make it possible to perform the function
u=u+d, if the input from I outside is 1. Behind the
boxes clock management, ComputeStepV and check-
Spike, there are similar circuits.
In the first design, the MATLAB-code was simply
implemented in hardware. As a result, only a limited
ICFC 2010 - International Conference on Fuzzy Computation
346
number of neurons could be implemented in hardware
due to the heavy use of the FPGA resources.
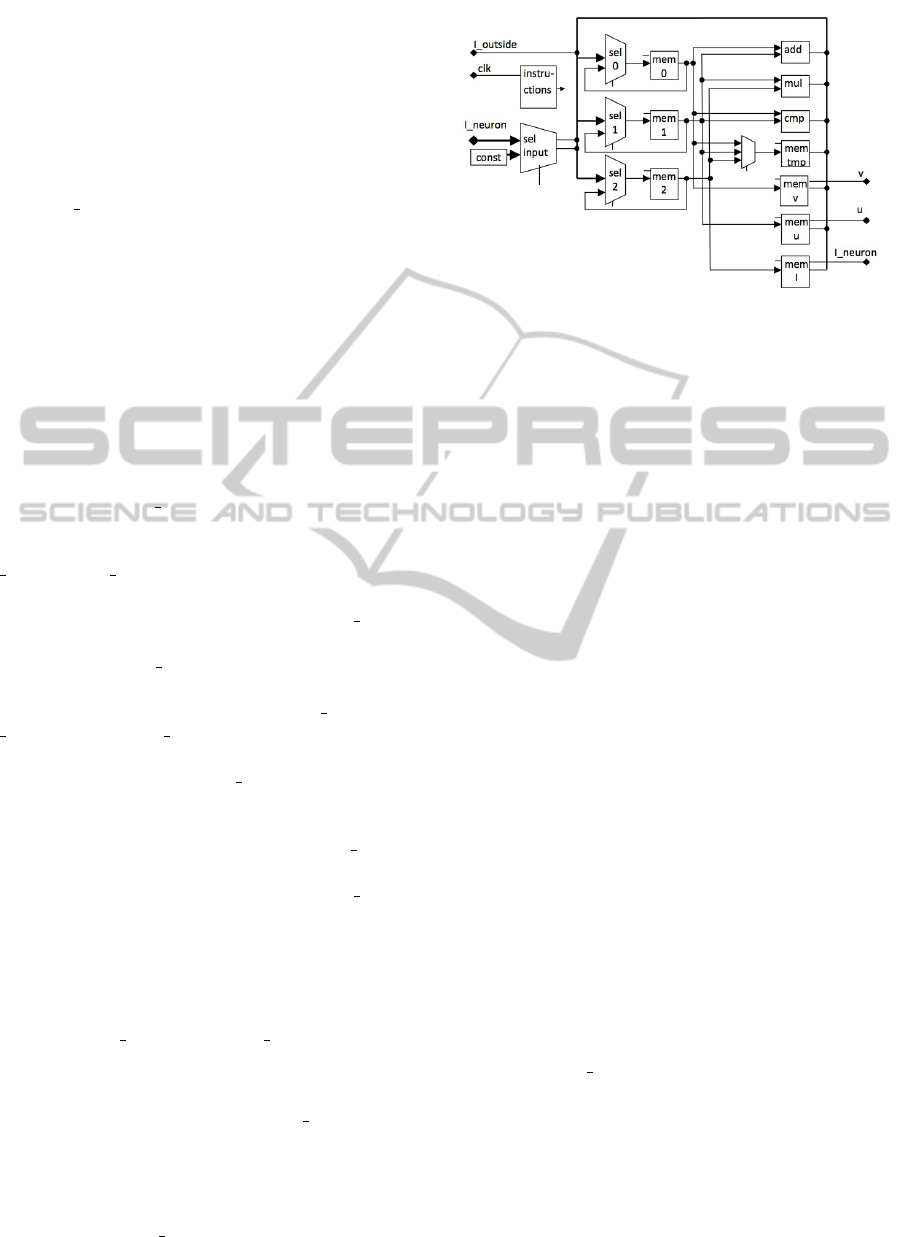
In order to improve the first architecture a second
design was proposed. This new design consists in
building a computer-like circuit on an FPGA. Figure
3 shows the developed architecture where each wire is
32 bit wide, with exceptions of the 1 bit input clk, the
64 bit output of the instructions-block and of the 1 · n
bit input I neuron, where n is the number of neurons
in a neural network.
This circuit consists only of one instance of each
macrofunction. There is one adder (add), one mul-
tiplier (mul) and one comparator (cmp). There are 7
memories, as well. The most important ones are the
three 32 bit wide registers mem 0, mem 1 and mem
2 before the computing devices add, mul, cmp. The
values of these memories are the inputs of the compu-
tational blocks. They are as well the memories which
store the results of the output of the computational
blocks. The other memories mem v, mem u and mem
I store the states u and v of the system and the state
of the output spike I neuron. The memory mem temp
stores some temporary values to use them in further
computational steps. This circuit has the inputs clk,
I outside and I neuron.
The clk input is necessary for clocking some of
the system’s memories and macrofunctions. I outside
brings an input spike from the outside world to the
neuron. The input I neuron carries the input stimuli
generated by pre-synaptic neurons.
The reason for the distinction from I neuron and
I outside is because I outside can have any value and
is just added to the total current (code on page 3, line
6), whereas the input current I neuron from the other
neurons is either 0 or 1 (code on page 3, line 9) and
before adding I to get the input current for the formula
v = v+0.5(0.04v
2
+5v+140−u+I), each I neuron
i
has to be multiplied with a weight factor s
i
, which
represents the strength of the connection. I outside
counts other stimuli than the pre-synaptic (eg. noise).
This fact is also shown in the following formula,
where n represents the number of neurons in a neural
network:
I = I outside +
n
∑
i=0
s
i
· I neuron
i
(4)
The outputs v and u can be used to monitor the states
v and u of the neuron. The output I neuron is the
only important output of the neuron in the network
perspective. It gives the information, whether the neu-
ron spikes or not.
In a network of several neurons, it has to be con-
nected to the input I neuron of each other neuron in
the network.
Figure 3: This figure shows the datapath of one neuron. The
control paths are indicated by small lines. The control in-
formation come from the block Instructions. The bold lines
represent busses. The wires in this figure are 32 bit wide
with the exceptions of the one bit wide clock input clk and
the 64 bit wide control output from the Instructions-block.
There are five multiplexers in the circuit. The most
important ones are the three before the mem 0, mem
1 and mem 2. These multiplexers select one of their
inputs to feed it to their following memories. By do-
ing this, they select an operation or a memory. These
data will be stored in mem 0, mem 1 and mem 2 and
affect the system in the next cycle. The inputs to these
multiplexers are the following:
• The output of the memory after the multiplexer.
This source is selected, if the memory should not
change its value in a cycle. When the mem-
ory stores its next value, the same value is being
stored in the memory, which was already in the
memory.
• The result of the adder.
• The result of the multiplier.
• The output of the comparator.
• The output of mem v.
• The output of mem u.
• The output of mem I.
• The last 32 bits of the output of the instruction.
This operation is used to load a constant value to
the registers.
• The input I outside, which is the input from the
outside world to a neuron.
• The output of mem tmp.
• The first output of the multiplexer sel input,
which contains the information whether predeces-
sor neurons spiked.
• The second output of the multiplexer sel input,
which contains the information about the weight
AN EFFICIENT IMPLEMENTATION OF A REALISTIC SPIKING NEURON MODEL ON AN FPGA
347

Figure 4: The Instructions-block is divided into the source
part and the time management part. The source part is a
memory, which gives an instruction for each value of PC.
The time management increases the PC after some clock
cycles in the clock wire. The number of clock cycles which
are necessary to increase the program-counter (PC) by 1 is
given by each instruction individually.
of the connection from another neuron to this neu-
ron. With this information, the input spike can be
calculated according to equation (4).
• Four inputs to select the parameters a, b, c, d.
The multiplexer Sel input has 2 outputs and 2·n in-
puts, where n is the number of neurons in a neural net-
work. For each neuron in the network, there are two
connections to the multiplexer sel input. One input
carries the information whether the predecessor neu-
ron spikes and one input carries the information, con-
taining the weight of the connection between the two
neurons. When summing up the input spikes from
other neurons, this multiplexer chooses a neuron, and
read in its spike. Then, it selects the next neuron, to
read in its spike and sum all spikes up according to
formula (4). The multiplexer next to mem tmp selects
which number (if any) should be stored in mem tmp.
The instructions-block provides the circuit with
instructions, which control what the circuit does. Fig-
ure 4 provides an overview of the Instructions-block.
The first sub-block is the source-block. This block
consists of a memory, which is initialized with some
predefined content before the circuit begins to run
and it is read only. The 7 bit program counter PC is
connected to the address input of the memory-block
source. For each value of PC, there is a 64 bit value on
the output of the source-block: The instruction. The
instruction is one of the outputs of the instructions-
block, but it is used in the time management-block as
well. In the whole circuit, only some parts of this 64
bit value are used to control the function of blocks,
memories and to control the multiplexers.
The time management is built of two functions.
The clock divider divides the clock by the 4 bit wide
number on its second input. So, the clock divider’s
output end instruction is a clock with a reduced fre-
quency. The counter-block increases its value after
each cycle of the end instruction. It starts with 0 and
counts up. The resulting output signal of the counter
is the program counter (PC), which affects the mem-
ory source. The output end instruction causes the
memories mem 0, mem 1 and mem 2 in Figure 3 to
store the next value. Since the end instruction wire
determines, when an instruction ends, a whole cycle
of end instruction is often just called cycle.
4 CONCLUSIONS
The first attempt was straightforward to implement
and it was easy to understand the underlying func-
tion. But for the goal to implement a lot of neurons
in a relatively small FPGA, this model is not suffi-
cient. The second model described in this paper is
much more efficient, as it makes it possible to im-
plement a model of a neural network 10 times higher
than in traditional implementation. The limiting fac-
tor are the embedded multipliers. In this work, it is
not possible to create the desired macrofunctions just
out of logic and without the use of these multipliers.
However, the system computes much faster than real-
time. While designing this model, there was always a
focus on real-time compatibility, very important when
this network is needed to simulate a group of neurons,
which have to interact with the outside world.
All the designs in this paper work correctly. First,
the hardware design was logically validated with
Modelsim software, then was performed a timing
analysis with Altera TimeQuest software. After all
these software validations, the hardware was tested
in one Altera DE2 board containing one Cyclone II
FPGA, EP2C35F672C6, resulting in a computation
speed 109 times faster than real-time. The resource
usage of the circuit is very high since the processing
of floating point instructions is very resource inten-
sive, making a parallel simulation of more than 10
neurons impossible with the used device (low-cost Al-
tera FPGA). Table 2 shows the resource usage for of
the two models which were described in this paper. It
is important to emphasize that this work was imple-
ment on a low-cost and low-density FPGA Design.
There are some solutions to overcome the hard-
ware limitations: considering that the processing time
is only 10 % of the real time, each module might be
used 10 times, raising the number of neurons in the
network. Another possibility consists in using exter-
nal memories -containing large bandwidth- to store
the synaptic weights, as in the latest FPGAs models.
This work showed an efficient hardware imple-
mentation of a neural model. The current implemen-
tation runs a very accurate simulation of the biologi-
cal reality. One of the results of this project is a neural
model consisting out of 10 neurons, 100 times faster
ICFC 2010 - International Conference on Fuzzy Computation
348
Table 2: Resource usage.
First implementation Second implementation Board ressources
Total combinatorial functions 7287 1664 33216
Registers 3819 755 33216
Embeded 9 bit multipliers 42 7 70
than real time, for further research and development.
However, higher density FPGAs with higher
bandwidth would make it possible to simulate larger
networks. The latest FPGA model from the same
manufacturer has 36 times more logical elements than
the device used in this work.
ACKNOWLEDGEMENTS
The authors would like to thank FAPEMIG for fund-
ing the project, the laboratory of intelligent systems
of CEFET-MG for the technical support and for mak-
ing available its infra-structure, which made this work
possible.
REFERENCES
Edelman, G. M. (1987). Neural darwinism: The theory of
neuronal group selection. Basic Books, New York.
Floreano, D., Epars, Y., Zufferey, J., and Mattiussi, C.
(2006). Evolution of Spiking Neural Circuits in Au-
tonomous Mobile Robots. International Journal of
Intelligent Systems, 21(9):1005–1024.
Florian, R. (2006). Spiking Neural Controllers for Pushing
Objects Around. LECTURE NOTES IN COMPUTER
SCIENCE, 4095:570.
Friston, K. (2010). The free-energy principle: a uni-
fied brain theory? Nature Reviews Neuroscience,
11(2):127–138.
Hadders-Algra, M. (2000). The neuronal group selection
theory: a framework to explain variation in normal
motor development. Developmental Medicine and
Child Neurology, 42(08):566–572.
Izhikevich, E. (2003). Simple model of spiking neurons. In
IEEE transaction on neural networks.
Izhikevich, E. (2004). Which Model to Use for Cortical
Spiking Neurons? IEEE Transactions on Neural Net-
works, 15(5):1063.
Izhikevich, E., Gally, J., and Edelman, G. (2004). Spike-
timing dynamics of neuronal groups. Cerebral Cortex,
14(8):933.
Izhikevich, E. M. (2007). Dynamical Systems in Neuro-
science: The geometry of Excitability and Bursting.
MIT Press, Cambridge, London, ISBN 0262090430,
9780262090438, 441 pp.
Maguire, L., McGinnity, T., Glackin, B., Ghani, A., Bela-
treche, A., and Harkin, J. (2007). Challenges for large-
scale implementations of spiking neural networks on
FPGAs. Neurocomputing, 71(1-3):13–29.
Rice, K., Bhuiyan, M., Taha, T., Vutsinas, C., and Smith, M.
(2009). FPGA Implementation of Izhikevich Spiking
Neural Networks for Character Recognition. In 2009
International Conference on Reconfigurable Comput-
ing and FPGAs, pages 451–456. IEEE.
Soares, G. E., Borges, H. E., and Gomes, R. M. (2010).
Synthesis of Frequency Generator via Spiking Neu-
rons Network: a Genetic Algorithm Approach. In-
ternational Conference on Bio-Inspired Computing:
Theory and Applications.
Thomas, D. and Luk, W. (2009). FPGA accelerated sim-
ulation of biologically plausible spiking neural net-
works. In 2009 17th IEEE Symposium on Field Pro-
grammable Custom Computing Machines, pages 45–
52. IEEE.
AN EFFICIENT IMPLEMENTATION OF A REALISTIC SPIKING NEURON MODEL ON AN FPGA
349
