
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO
REALITY USING THE PLUG&LEARN ARCHITECTURE
Frank G
¨
uttler, Wolfgang Rabe, J
¨
orn Hoffmann, Martin Bogdan
Department of Computer Engineering, Universit
¨
at Leipzig, Johannisgasse 26, 04109 Leipzig, Germany
Ralf Der
Max Planck Institute for Mathematics in the Sciences, Inselstraße 22, 04103 Leipzig, Germany
Keywords:
Robotics, Self-organization, Neural networks.
Abstract:
Simulations for robots like the robot simulator LPZROBOTS allow a fast proof of theoretical concepts using
self-organizing neural networks. This publication presents a hardware platform as a solution to transpose
these theoretical results to real robots without the time consuming reimplementation of algorithms and with-
out the loss of computational power a standard desktop PC offers. This is shown by the example of the
THREECHAINED TWOWHEELED robot which gains embodiment and shows the same emergent behaviour in
comparison to the simulated counterpart.
1 INTRODUCTION
The rapid technical progress in the fields of sensor,
mechanotronic, and processing technology gives rise
to more and more complex robotic systems. The two
major problems in these fields are first the control of
such objects under complex environmental conditions
and second the technical realization. The controller
has to learn to maximally exploit the physical pecu-
liarities of the body in its interaction with the environ-
ment. This can be related to the general idea of em-
bodiment (Pfeifer and Scheier, 1999), meaning that
the brain, body and environment form a common dy-
namical system that can not be simply divided into
separate operational units (Lichtensteiger, 2003). Of
course, such a complex dynamical system is conve-
nient to nearly any kind of dynamics. Using the phe-
nomenon of self-organization is an established objec-
tive in the embodied intelligence approach (Pfeifer
and Bongard, 2006) and in the dynamical systems
theory as applied to robotics, e.g. (Tschacher and
Dauwalder, 2003).
Another kind of self-motivated learning approach
to get is to let the robot gain maximal informa-
tion about itself and its environment as first done by
(Schmidhuber, 1990). From information theory, it is
well known that information theoretic measures used
in the sensorimotor loop is beneficial (Polani et al.,
2006), (Lungarella and Sporns, 2005). Cooperative
and emergent behaviour can be observed if the infor-
mation measure in the sensorimotor loop is high (Ay
et al., 2008; Der et al., 2008) being self-organized in
an interesting matter.
The realization of agents which are able of self-
organizing their behaviour forms a major challenge
for the engineering of real artificial systems. How-
ever, this implies that control principles found in the-
ory have to be proofed. For this simulations are in-
tended, wherein the real robots are imitated, e.g. the
robot simulator LPZROBOTS. This is suitable for
many control principles, but it is not clarified if these
can cope with robots in reality.
It’s evident that the research in this field is di-
verged into work with simulated and real robots.
Whereas using simulations, the proof of concepts are
investigated quite expeditious. However, we believe
that real robots make this investigations much more
difficult and time-consuming. This has many known
reasons, first of all that the used hardware platform
of the robot is too distinct related to the simulated
counterpart, e.g. that the used motors and sensors
in reality are not ideal as in simulation due to their
missing exact characteristic curves or the varied con-
trol of such used periphery. Additionally, it’s a time
consuming challenge to transfer the control principles
used in the simulation to the real hardware platform.
350
Güttler F., Rabe W., Hoffmann J., Bogdan M. and Der R..
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO REALITY USING THE PLUG&LEARN ARCHITECTURE.
DOI: 10.5220/0003086103500357
In Proceedings of the International Conference on Fuzzy Computation and 2nd International Conference on Neural Computation (ICNC-2010), pages
350-357
ISBN: 978-989-8425-32-4
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)
Unfortunately these platforms often lack computa-
tional power and furthermore need specialized code
for their special units like Float-Pointing-Unit (FPU)
or Digital-Signal-Processor (DSP), e.g the BunnyBot
platform (Wolf et al., 2009), CotsBots (Bergbreiter
and Pister, 2003) or LEGO Mindstorms (Vamplew,
2004).
The major problem is to get the sophisticated algo-
rithms into the robots, which is in most cases impos-
sible, e.g. information measure based theories which
need an extreme computational power. For exam-
ple, the Beobot platform ensures this by four 1.1GHz
CPUs (Chung et al., 2010). But the realized compu-
tational power is much lower than a standard Desktop
PC offers and they are not practical. Additionally, off-
the-shelf analysis tools cannot be used.
The approach of the PLUG&LEARN architecture
presented in this paper concerns and solves this prob-
lems by establishing an easy comparison for real
robots against their simulated counterparts. This is
possible due to the fact that the differences between
the two sides simulation and reality are minimized to
a level which has not to deal with hardware platform
specific problems.
At first, in the section 2 the approach presented in
this paper is outlined. After that, the section 3 cleari-
fies the approach to obtain robots with self-organizing
behaviour, including a brief introduction of the used
simulator for this theoretical results. These self-
organizing neural networks are used as an example
for sophisticated algorithms. After the presentation
of the PLUG&LEARN architecture in section 4 a com-
parison between a simulated robot and their real coun-
terpart is shown by example of the THREECHAINED
TWOWHEELED robot (section 5).
2 MODUS OPERANDI
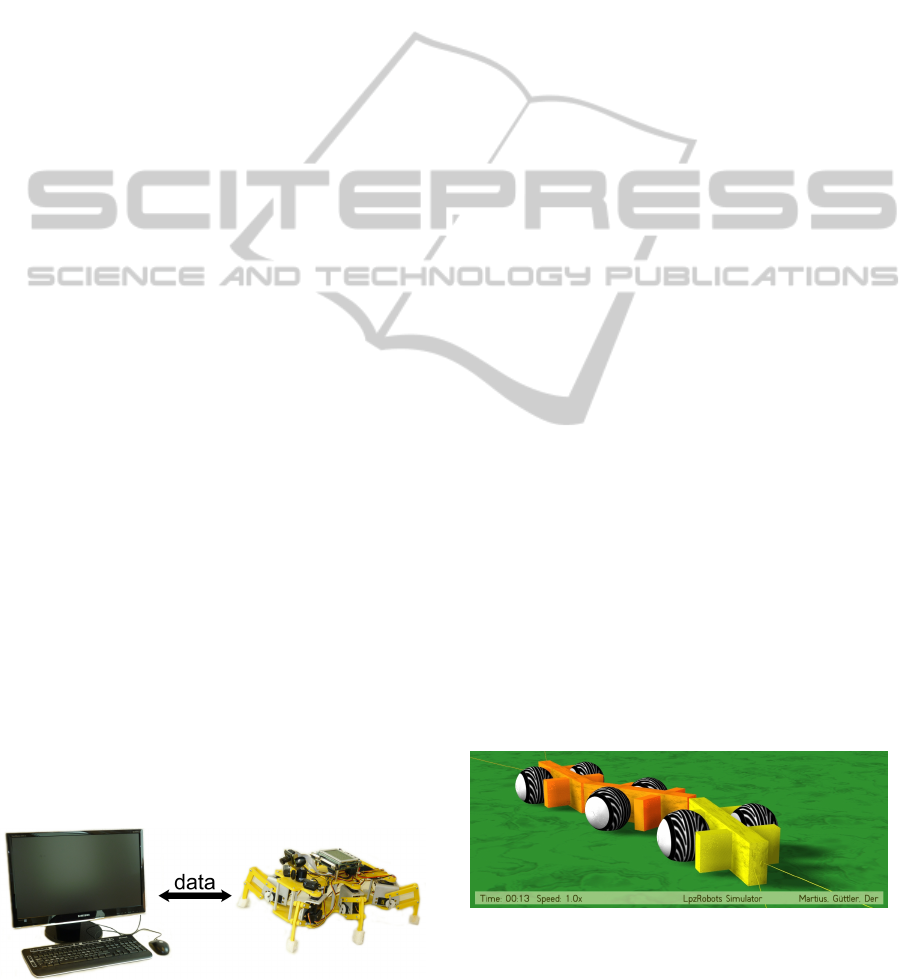
In order to clearify the approach of this paper, the idea
is outlined in this section as shown in Figure 1. In
comparison to other robot platforms here the sophis-
ticated algorithms are computed on the same standard
desktop PC as in the simulation. In order to close
Figure 1: The outlined idea of the PLUG&LEARN architec-
ture in a schematic overview.
the sensorimotor loop, the motor values generated
by the algorithm are transferred as commands to the
robot, who executes the commands. With a defined
frequency, the robot transmits the sensory informa-
tion to the standard desktop PC, where the algorithm
can compute the next step as in the simulation. The
fact that the sophisticated algorithm runs on the stan-
dard desktop PC enables all available computational
power and the use of off-the-shelf-tools. For example,
self-organizing architectures and research can easily
be transferred from simulation to real robots without
rewriting any code.
3 THE GENERAL APPROACH TO
SELF-ORGANIZATION
Consider a robot which produces in each instant t =
0, 1, 2, . . . of time the vector of sensor values x
t
∈ R
n
where x
t
= (s
t1
, . . . , s
tn
) are n sensors, s
ti
measuring
the angle of the joint or the velocity of the motor i at
time t. The controller is given by a function K : R
n
→
R
m
mapping sensor values x ∈ R
n
to motor values y ∈
R
m
y = K (x) (1)
for variables being at time t. For the example demon-
strated in figure 2 as well as in section 5 we have
y
t
=
y
t
le f t
y
t
right
(2)
being the target velocity of the wheel left and right
and x
t
the measured velocities at time t. Our con-
troller has to be adaptive, i.e. it depends on a set of
parameters c ∈ R
C
, here c ∈ R
2
. In the cases con-
sidered explicitly below the controller is realized by a
one layer neural back propagation network defined by
the pseudolinear expression
K
i
(x) = g (z
i
) (3)
Figure 2: The THREECHAINED TWOWHEELED robot
in the 3D physically realistic robot simulator called
LPZROBOTS. The chain consists (here) of three robots
jointed to each other. Each robot has two wheels y
t
∈ R
2
and therefore two measured velocities x
t
∈ R
2
.
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO REALITY USING THE PLUG&LEARN
ARCHITECTURE
351

where g(z) = tanh (z) and
z
i
=
∑
j
c
i j
x
j
+ H
i
(4)
being H a bias (threshold).
Due to the non-linearities obtained by g(z) in ad-
dition with pseudo-chaotic inputs from the feedback
sensors the whole system turns into very highly non-
trivial system. The behaviours are generated essen-
tially by an interplay of neuronal and synaptic dynam-
ics.
3.1 World Model and Sensorimotor
Dynamics
We assume that our robot has a minimum ability for
cognition. This is realized by an additional world
model F : R
n
× R
m
→ R
n
mapping the actions y of the
robot on the new sensor values, i.e.
x
t+1
= F (x
t
, y
t
) + ξ
t
(5)
where ξ
t
is the model error. The model F can be
learned by the robot using any learning algorithm of
supervised learning.
In the case considered below we have x, y ∈ R
n
and
we assume that the response of the sensor is linearly
related to the motor command, i.e. we write
x
t+1
= Ay
t
+ B + ξ
t
(6)
where A is a n×m matrix, B a column, and ξ the mod-
elling error. The model is learned by gradient descent
as
∆A = ε
M
ξy
T
(7)
both ξ and y taken at time t. The model learning is
very fast so that the model parameters change rapidly
in time hence different world situations are modelled
by relearning. Furthermore the model only is to rep-
resent the coarse response of the world to the actions y
of the robot. The behavior is organized such that this
reaction is more or less predictable. Hence the world
model mainly is to give a qualitative measure of these
response properties.
With these notions we may write the dynamics of
the sensorimotor loop in the closed form
x
t+1
= ψ (x
t
) + ξ
t
(8)
where in our specific case
ψ(x) = AK (x) (9)
3.2 Realizing Self-organization
As is well known from physics, self-organization re-
sults from the compromise between a driving force
which amplifies fluctuations and a regulating force
which tries to re-stabilize order in the system. In
our paradigm for both, the reality and simulation, the
destabilization is achieved by increasing the sensitiv-
ity of the sensory response induced by the actions
given by the controller. Since the controls (motor val-
ues) are based on the current sensor values, increasing
the sensitivity in this sense means amplifying small
changes in sensor values over time which drives the
robot towards a chaotic regime.
The counteracting incentive is obtained from the
requirement that the consequences of the actions
taken are still predictable. This should keep the robot
in ”harmony” with the physics of its body and the
environment. More details may be found in (Hesse,
2009; Martius, 2010).
The robot (see figure 2) is driven into a working
regime where the noise and external forces are able
to switch between the behaviours of the robot, e.g.
from one direction to the opposing one. Furthermore
the robot may discern between light and heavy mov-
able objects. He is able to synchronize between other
coupled robots resulting in composed emergent be-
haviours, see section 5.2.1. This working regime is
also called the effective bifurcation point. In this re-
gion the robot executes long distance sweeps of dif-
ferent lengths into both directions without loosing its
sensitivity to perturbations (Der et al., 2008).
3.3 The Robot Simulator LPZROBOTS
These and other results were mainly acquired through
the 3D physically robot simulator LPZROBOTS de-
veloped by the Robotics Group for Self-Organization
of Control (Martius et al., 2007). Videos about the
research results gathered with the robot simulator
LPZROBOTS can be found under (Der et al., 2010).
A main advantage compared to many other Open-
Source simulators (e.g. Gazebo simulator, 2008) is
that the robot simulator LPZROBOTS uses much more
realistic rigid body dynamics provided by the Open
Dynamics Engine (ODE) to achieve results close to
reality (Smith, 2005). For example, LPZROBOTS sup-
ports the use of materials in order to get more realistic
frictions. So as to obtain bodies with correct move-
ment, the ODE considers not only contacts with colli-
sion and friction completely, it also provides common
types of motors, joints and limits in a realistic man-
ner.
The robot simulator LPZROBOTS is provided by
the comprehensive LpzRobots package and can be
found under (Martius et al., 2007). It also con-
tains the SELFORG package which includes the self-
organizing neural networks in order to control the ro-
ICFC 2010 - International Conference on Fuzzy Computation
352

bots. A more detailed description of LPZROBOTS can
be found in (Martius, 2010).
4 THE PLUG&LEARN
ARCHITECTURE
The major disadvantage of simulators is that they can-
not reflect the reality in all details. This applies also
to the robot simulator LPZROBOTS, whereas the real
robots take a major role for the research to proof
the theoretical concepts gathered with the simulator.
For this reason this publication presents a solution to
compare these behavioural results of simulated self-
organizing robots (Der et al., 2008) with their real
counterparts under the premise of self-organizing be-
haviour.
The task transposing simulated robots into reality
is usually a very long and complex way accompanied
by many problems. One of a major problem is that
real robots use in most cases a completely different
hardware platform than the standard desktop PC run-
ning the simulation whereby the robot is controlled
by e.g. a self-organizing neural network. Addition-
ally, real hardware is not build up uniform as in the
simulator, e.g. driving the motors and reading out
the sensors in reality are not as easy as in simulation
hence there is a real communication demand between
the periphery and the used hardware. Because of
the different architecture (e.g. ARM, AVR32) of the
used hardware platform on the one hand the code for
the neural network has usually to be entirely rewrit-
ten. On the other hand, if the code is written for the
PC and robot platform in general way, the code can-
not be specialized enough in order to run in realtime
for big neural networks. Remember, the simulation
timesteps can take as much time as needed, but in
reality not. Furthermore the used hardware platform
must have the needed computation power in order to
control the robot with big neural networks. Though
such hardware platforms consume much electrical en-
ergy which have to be supplied by the battery pack, by
what either the available utilization time of the robot
is shortened or the heaviness of the robot is further in-
creased through a bigger battery pack.
Another crucial point is the restricted availability
of off-the-shelf analysis tools used in the simulation,
for real robots these tools are not as usable as in simu-
lation because the data to be analyzed has to be trans-
ferred to the standard desktop PC. However, this im-
plies that if analyzing a big neural network in real-
time a huge amount of data has to be transferred via
cable or remote connection. If using a cable the robot
lacks mobility, whereas the use of remote connections
limits the bandwidth and therefore not all data can be
used for realtime analysis.
An important aspect related to the reproducibility
of simulated results in reality is that these differences
between a simulator and a common hardware plat-
form are too heavy. It’s very complicated to obtain the
same or similar test conditions. In order to overcome
all these problems mentioned the PLUG&LEARN ar-
chitecture is introduced. The PLUG&LEARN archi-
tecture minimizes these differences with respect to the
robot simulator LPZROBOTS to a level, which allows
a fast transposition from simulated robots into reality.
The PLUG&LEARN architecture is realized by
several components, both software and hardware. The
software framework is directly integrated in the com-
prehensive software package LpzRobots which also
contains the robot simulator LPZROBOTS.
With the PLUG&LEARN architecture each robot
can contain many sensors and motors as shown in
Figure 3. They are managed by one or more Embed-
ded Controller Boards (ECB). A robot may consist
of more than one ECB in order to extend the com-
posed robot design. This resulting generic structure
of the robots constrain a wireless communication be-
tween the ECB and the standard desktop PC where
the ECBROBOTS package ensures that the robots are
controlled by a self-organizing neural network pro-
vided by the SELFORG framework. ECBROBOTS is
able to manage more than one robot at the same time
which is restricted only by the limited bandwidth of
the wireless communication. The PLUG&LEARN ar-
chitecture supports the use of more than one commu-
nication channel in order to extend the communica-
tion bandwidth as shown in Figure 4.
motor values
motor values
motor values
sensor values
sensor values
sensor values
Robot 1 Robot 2
. . .
Robot m
standard desktop PC
Controller 2
Controller mController 1
ECB 1.1
ECB 1.2
.
.
.
ECB 1.n
Sensors
Motors
. . .
. . .
ECB 2.1
ECB 2.2
.
.
.
ECB 2.n
Sensors
Motors
. . .
. . .
ECB m.1
ECB m.2
.
.
.
ECB m.n
Sensors
Motors
. . .
. . .
Figure 3: The PLUG&LEARN architecture in a schematic
overview. Each composed robot contains many sensors
and motors, which are managed by several Embedded Con-
troller Boards (ECBs). The composed robot design requires
that each ECB communicates wireless with the standard
desktop PC where ECBROBOTS ensures that the robots are
controlled by a self-organizing network.
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO REALITY USING THE PLUG&LEARN
ARCHITECTURE
353

ECB
ECB
Controller
Controller
Controller
Message Dispatcher
1: motor values
7: sensor values
Communication Channel
Communication Channel
Communication Channel
2: dispatch motor values
6: collect sensor values
ECB
3: motor values
4: request values
5: sensor values
Figure 4: Schematic overview of the communication se-
quences in order to establish the sensorimotor loop. The
Controller computes new motor values (1) which are dis-
patched to the Communication Channels (2). Each Channel
can both serve multiple Controllers and manage multiple
ECBs. It transmits the motor values to the ECB, this is done
sequentially for all ECBs managed by this Communication
Channel. When the time is close to the configurable react-
ing time, the Communication Channels transmit a “request
values” message to the ECBs (4) whereup the ECBs sends
the new sensor values back (5). After collecting all sensor
values (6) they are delivered to the Controller (7).
Using a wireless communication leads to the chal-
lenge that the communication may be interrupted by
loss of data packages which is reduced by the used
underlying wireless protocol. In the case of a packet
loss two methods are provided by the PLUG&LEARN
architecture. First, given that some Communication
Channels (see figure 4) finish earlier than other ones
by reason that this channels manage less ECBs than
other ones, they have enough time in order to request
new sensor values from the ECB with data packet loss
again. All that even goes so far as an ECB of a robot
can be addressed again when other ECBs of this robot
have not sent their sensor values yet. Second, if the
first method does not help, the self-organizing neural
network gets older sensor values which effect is dis-
cussed in section 5.3.
4.1 The Embedded Controller Board
The ECB could be marked as the heart of a robot.
Not only all periphery is connected with this ECB,
it can communicate wireless with other remote hard-
ware, e.g. the standard desktop PC. It provides volt-
age regulators in order to supply both the ECB and
the periphery. There are several busses served by the
ECB which can be used to attach external periphery.
In addition the ECB can read out analog sensors and
drive servo motors itself. Many data links are lead
through in order to clip on an extension board which
is able to enhance the capabilities of the ECB in addi-
tion.
4.2 PLUG&LEARN for Motors and
Sensors
One of the advantages of the PLUG&LEARN archi-
tecture is that there is no reprogramming needed if
new sensors or motors are attached to the robot. The
firmware running on the ECB and on other periphery
like the motorboard is designed to detect and integrate
new modules into the sensorimotor loop without any
help.
This leads to the assumption that at least the self-
organizing neural network should be reconfigured.
The architecture of such networks allows the control
software ECBROBOTS to configure the network once
again without any help. This self-organizing neural
networks are usable for any kind of robot in order to
create customized behaviour based on the structure
of the robot, e.g. alignment of the joints and mo-
tors (Martius, 2010). This kind of feature is so-called
PLUG&PLAY brain, which reaches for real robots in
combination with the PLUG&LEARN architecture a
next level.
An interesting point is that the recognition of new
motors and sensors does not require a restart of the
self-organizing neural network. This is possible when
the network is initialized with a higher number of mo-
tors and sensors than really used in the beginning. So
if this maximum number is not exceeded by attach-
ing new motors and sensors, the already computing
self-organizing neural network is able to learn how to
interact with them, using them for the new emerging
behaviour of the robot. This takes usually less than 1
minute (Der et al., 2010). Using a higher maximum
number of motors and sensors is naturally supported
by ECBROBOTS, also their rescan is possible at the
push of button.
4.3 PLUG&LEARN for Segmented
Robot Components
While every ECB can control a bunch of motors
and sensors itself, a robot may consist of more
than one ECB. Exploiting their wireless communi-
cation capabilities, these ECBs do not need to be
connected to each other. Thus the robots can be
constructed in a generous and preferred way utiliz-
ing the modularity of the PLUG&LEARN architec-
ture. The PC software package ECBROBOTS allows
to configure which ECBs belong to one robot con-
trolled by one self-organizing neural network. An
example of such a modularized robot is the THREE-
CHAINED TWOWHEELED robot driven by only one
self-organizing neural network described in section
5.2.2.
ICFC 2010 - International Conference on Fuzzy Computation
354

5 THE THREECHAINED
TWOWHEELED ROBOT
In this section the THREECHAINED TWOWHEELED
robot as an example for transposing simulated self-
organizing robots into reality is presented, see Figure
5. This robot uses the PLUG&LEARN architecture
described in section 4 and is a composition of three
individual two wheeled robots, see figure 5.
5.1 Machinery
Every two wheeled robot of the chain has a speed mo-
tor with gear mechanism for each wheel. These mo-
tors are directly controlled by a self developed mo-
torboard connected to the ECB via the “two wire
interface”-bus. This motorboard includes a current
limitation in order to allow the configuration of max-
imum force transmitted to the wheels. If the current
utilized by the motors is over a configurable defined
value, the four quadrant chopper of the motorboard
switches the motor into idle speed, thus wheelspins
can be avoided which is discussed in section 5.3.
Additional sensors can be mounted at the robot
case, e.g. infrared sensors. They put the controller
in a position to recognize walls or barriers previ-
ous to a possible collision. The THREECHAINED
TWOWHEELED robot has in summation 6 infrared
sensors, 3 on front of the first robot and 3 on back
of the last robot. The top of the cases of the robots
are assigned to hold more sensory devices such as a
camera. If additional sensors are attached, they are
automatically recognized and integrated into the sen-
sorimotor loop.
5.2 Application Cases
The PLUG&LEARN architecture allows the opera-
tion of two mainly different application cases, using
one SELFORG controller for either each robot or all
Figure 5: The THREECHAINED TWOWHEELED robot de-
signed after the simulated counterpart. It consists of 3
robots, each one individually controlled by a separate ECB.
The robot can be seen in action in the corresponding videos
(Gttler et al., 2010).
robots. These use cases are easy configured with the
PC software package ECBROBOTS. Mixed use cases
are also possible.
5.2.1 Decentralized Control
The first configuration is obtained by the use of one
SELFORG controller for each robot of the THREE-
CHAINED TWOWHEELED robot. Therefore each
controller gets a robot with 2 degrees of freedom and
2 corresponding motor speed sensors. The first and
the last robot can have additionally 3 infrared sen-
sors each, but are not considered in the preliminary
comparison to the simulated results obtained in (Der
et al., 2008). This results show that the synchroniza-
tion effects observed with the simulated counterpart
(see figure 2) can also be noticed in reality, see the
two corresponding videos (Gttler et al., 2010). The
robot moves not only into one direction but also keeps
explorative enough in order to invert its direction of
motion after some time. If the robot collides with a
barrier each TWOWHEELED robot often changes the
velocity resulting in that they become synchronous
after some time and therefore the chain moves away
from the barrier. The arising coherent motions of the
chain is an emerging phenomenon based on this syn-
chronization. This tends to explorative behaviours ex-
ploring the spatial extensions of a room the chain is
put into. The generated behavioural patterns are sim-
ilar in comparison with the simulation, especially the
wiggly line.
5.2.2 Centralized Control
In this use case the THREECHAINED TWOWHEELED
robot is controlled by only one SELFORG controller.
As an result we obtain a complex composed robot
with 6 degrees of freedom, 6 motor speed sensors and
6 infrared sensors. Future research studies are needed
in order to investigate if similar explorative behaviour
as in the decentralized case can be observed.
5.3 Crucial Points
Compared to the simulated counterpart the THREE-
CHAINED TWOWHEELED robot produces similar ex-
plorative behaviour but with some difficulties. The
first is that in the simulation the number of compu-
tation updates both of the physics engine ODE and
the self-organizing controller is exact 10 ms in order
to obtain a realistic simulation. This number can’t
and don’t needs to be achieved with real robots due
to the higher response times from the ECBs that ap-
proaches 15-30 ms combined with the fact that trans-
mitting new motor values to the ECBs and then re-
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO REALITY USING THE PLUG&LEARN
ARCHITECTURE
355

ceiving the sensor values must be handled with two
separate communication sequences resulting in about
10-15 updates per second for the controller, depen-
dent on the configured reacting time for the motors.
This reacting time is very important and can vary for
the used motors and sensors, going up to 100 ms. As
for example, the motorboard has a pid regulation to
obtain the motor speed given by the self-organizing
neural network. As is well known from measures, this
achievement of the correct speed takes some time ex-
ceeding 100 ms. This has to be recognized for the
control of real robots with self-organizing neural net-
works in order to get comparable test conditions of
simulation and reality.
The second challenge is that the motors are very
powerful and therefore wheelspins can easy occur. In
the simulation the maximum force transmitted to the
wheels is restricted. Additionally, the simulation al-
lows to change the mass of the robot in order to scale
the forces generated by the motors. So as to get sim-
ilar behaviour in reality, the maximum force trans-
mitted to the wheels can be restricted by the maxi-
mum motor current described in section 5.1. This is
very important by reason that the controller needs a
feedback through the motor speed sensors whether the
robot is moving or not and recognizing some barrier
the robot must circumnavigate. This feedback enables
the sensitivity of the sensory response induced by the
actions given by the controller discussed in section
3.2.
One problem is that the wireless communication is
not always stable whereby the self-organizing neural
network gets older sensor values. This is not critical
because the network tries to reduce the weight of this
sensors by time. As a consequence of this the network
learns how to interact with the remain of the robot in
order to create emergent behaviour. When the com-
munication is stable again, the self-organizing neu-
ral network could be a little bit “irritated”, but reinte-
grates the motors and sensors into the self-organizing
process. An example of that can be seen in the videos
(Gttler et al., 2010) where one segment of the THREE-
CHAINED TWOWHEELED robot is temporarily dis-
abled.
Another point is the noise of the sensors. While
in simulation the noise is generated by a pseudo-
random function, in reality the sensors have natural
noise given by physical conditions. This noise is dif-
ferent from the noise generated in simulation, where
for example white normal noise with no shift of the
centre of the gaussian curve is used. In reality the
noise has in most cases a shift depending on the sen-
sor physical properties. They are altered through e.g.
manufacturing processes and therefore differ from
one sensor to another one. This knowledge is im-
portant in order to understand how the synchroniza-
tion effects are established, since the noise together
with the controller weights is accountable for over-
or understeering the motors of the THREECHAINED
TWOWHEELED robot. In the simulation each sensor
gets the same noise type, whereby the simulation is
a more perfect world regardless to the real conditions
of the reality.
Another example for having differences between
the simulation and the reality is that the wheels have
some end play through the gear mechanism. The out-
come of this is that a touching force generated from
the motors cannot be transmitted immediately to the
wheels, the end play has to be passed first. This takes
time and therefore the synchronization of the robots
is more difficult and takes longer than in simulation
because the simulation does not consider end plays.
Additionally, the consideration would make no much
sense since each gear mechanism has a different end
play, changes in time and the gear has to be readjusted
on occasion.
As a consequence for comparisons, there are dif-
ferences between simulated and real robots. This are
especially the different noise and mechanical proper-
ties like end play or the wheelspins which must be
avoided by special electronic regulation. Due to the
higher response times the self-organizing neural net-
work cannot make as much updates as in simulation,
which can delicate affect the properties of the network
and therefore the control of the robot. Many differ-
ences cannot be eliminated in remote future. This is
another example why the reality can never be com-
pletely reflected by the simulation. Because of this
differences, experiments with real robots are essen-
tial in order to proof the theoretical results, as it is
not clear by default if these theoretical concepts stand
one’s ground in reality. Due to the fact that the sophis-
ticated algorithms don’t fit to the available hardware
of real robots, the PLUG&LEARN architecture avoids
this problems thereby computing the algorithms on
the standard desktop PC.
6 CONCLUSIONS AND FURTHER
WORK
This paper presented a solution in order to transpose
simulated self-organizing robots into reality using the
PLUG&LEARN architecture. The architecture is de-
signed to rapidly equip real robots with sophisticated
algorithms running on a standard desktop PC. Up to
the best of own knowledge, this approach is a novel
one in the field of robotics.
ICFC 2010 - International Conference on Fuzzy Computation
356

The advantages are twofold. First, physically cor-
rect simulated robots can be compared with their real
counterparts using the same “brain“. Thus, no code
written for the robot simulator LPZROBOTS needs to
be changed or adapted regarding to self-organizing
neural networks. Second, it allows to use the com-
putational power of a standard desktop PC as well
as easy to deploy extensions or off-the-shelf analysis
tools.
The THREECHAINED TWOWHEELED robot ex-
ample demonstrated the PLUG&LEARN architecture
shows that similar behaviours can be observed in as
reality as in simulation, but with difficulties. These
are caused by the differences between the simulation
and the reality. This implies that it is essential to use
real robots in order to proof theoretical concepts gath-
ered with the simulation. The PLUG&LEARN archi-
tecture minimizes the differences between the simu-
lation and reality to a level whereas a comparison be-
tween simulated and real robots are possible.
As for example, the PLUG&LEARN architecture
is used to drive an artificial human hand (Franke and
Bogdan, 2009). The task is to control this hand with
a self-organizing neural network in order to get emer-
gent motions from which Postures can be derived. A
simulated counterpart in LPZROBOTS is used to proof
theoretical concepts which are then tested with the
real artificial human hand.
A task for future research is to investigate if e.g.
the information theoretical aspects considered in (Der
et al., 2008) can also be measured for the real coun-
terpart or the centralized control involves the same be-
havioural results as with decentralized control.
REFERENCES
Ay, N., Bertschinger, N., Der, R., G
¨
uttler, F., and Olbrich,
E. (2008). Predictive Information and Explorative Be-
havior of Autonomous Robots. The EPJ B - Con-
densed Matter and Complex Systems, 63(3):329–339.
Bergbreiter, S. and Pister, K. (2003). CotsBots: An Off-the-
Shelf Platform for Distributed Robotics. IROS 2003.
Chung, D., Hirata, R., Mundhenk, T. N., Ng7, J., Peters,
R. J., Pichon, E., Tsui, A., Ventrice, T., Walther, D.,
Williams, P., and Itti, L. (2010). A New Robotics Plat-
form for Neuromorphic Vision: Beobots, volume 2525
of Lecture Notes in Computer Science, pages 325–
340. Springer Berlin/Heidelberg.
Der, R., G
¨
uttler, F., and Ay, N. (2008). Predictive Informa-
tion and Emergent Cooperativity in a Chain of Mobile
Robots. In Artificial Life XI. MIT Press.
Der, R., Martius, G., Gttler, F., Herrman, M., and Hesse,
F. (2010). Videos of Self-Organized Robot Behavior.
http://robot.informatik.uni-leipzig.de/videos.
Franke, M. and Bogdan, M. (2009). A New Lightweight,
Robust and Forceful Finger for an Artificial Limb.
WC2009 - MEDICAL PHYSICS AND BIOMEDICAL
ENGINEERING, pages 339–342.
Gttler, F., Rabe, W., and Bogdan, M. (2010).
Videos of THREECHAINED TWOWHEELED
robot showing Self-Organized Robot Behavior.
http://robot.informatik.uni-leipzig.de/Videos/PLA/
TCTW.
Hesse, F. (2009). Self-Organizing Control for Autonomous
Robots. A Dynamical Systems Approach Based on
the Principle of Homeokinesis. PhD thesis, Georg-
August-Universit
¨
at G
¨
ottingen.
Lichtensteiger, L. (2003). The Need to Adapt and Its Impli-
cations for Embodiment. In Embodied Artificial Intel-
ligence, pages 98–106.
Lungarella, M. and Sporns, O. (2005). Information self-
structuring: Key principle for learning and develop-
ment. In Proceedings 2005 IEEE Intern. Conf. Devel-
opment and Learning, pages 25–30.
Martius, G. (2010). Goal-Oriented Control of Self-
Organizing Behavior in Autonomous Robots. PhD the-
sis, Georg-August-Universit
¨
at G
¨
ottingen.
Martius, G., Der, R., and Gttler, F. (2007). LpzRobots
- Simulation Tool for Autonomous Robots.
http://robot.informatik.uni-leipzig.de/software.
OpenSource-Community (2008). Player/Stage/Gazebo -
free software tools for robot and sensor applications.
http://playerstage.sourceforge.net.
Pfeifer, R. and Bongard, J. (2006). How the Body Shapes
the Way We Think. A New View of Intelligence. MIT
Press.
Pfeifer, R. and Scheier, C. (1999). Understanding Intelli-
gence. MIT Press,Cambridge, MA.
Schmidhuber, J. (1990). A possibility for implementing
curiosity and boredom in model-building neural con-
trollers. In Proceedings of the first international con-
ference on simulation of adaptive behavior on From
animals to animats, pages 222–227, Cambridge, MA,
USA. MIT Press.
Smith, R. (2005). Open Dynamics Engine. http://ode.org/.
Tschacher, W. and Dauwalder, J. (2003). The Dynamical
Systems Approach to Cognition: Concepts and Empir-
ical Paradigms Based on Self-Organization, Embodi-
ment, and Coordination Dynamics. World Scientific
Publishing Company, Singapore.
Vamplew, P. (2004). Lego Mindstorms Robots as a Platform
for Teaching Reinforcement Learning. In AISAT2004,
Hobart, Australia.
Wolf, J., Vicente, A., Gibbons, P., Gardiner, N., and Tilbury,
J. (2009). BunnyBot: Humanoid Platform for Re-
search and Teaching. Buch Progress in Robotics,
44:25 – 33.
TRANSPOSING SIMULATED SELF-ORGANIZING ROBOTS INTO REALITY USING THE PLUG&LEARN
ARCHITECTURE
357
