
SIMPLE GENETIC ALGORITHM WITH α-SELECTION
Intrinsic System Model, Fixed Points and the Fixed Point Graph
Andr´e Neubauer
Information Processing Systems Lab, M¨unster University of Applied Sciences
Stegerwaldstraße 39, D-48565 Steinfurt, Germany
Keywords:
Simple genetic algorithm, α-selection, Random heuristic search, Dynamical system model, Infinite population
model, Fixed point graph.
Abstract:
Genetic algorithms (GA) are instances of random heuristic search (RHS) which mimic biological evolution
and molecular genetics in simplified form. These random search algorithms can be theoretically described
with the help of a deterministic dynamical system model by which the stochastic trajectory of a population
can be characterized using a deterministic heuristic function and its fixed points. For practical problem sizes
the determination of the fixed points is unfeasible even for the simple genetic algorithm (SGA). The recently
introduced simple genetic algorithm with α-selection allows the analytical calculation of the unique fixed
points of the dynamical system model. In this paper, an overview of the theoretical results for the simple ge-
netic algorithm with α-selection and its corresponding intrinsic system model is given. Further, the connection
to the fixed point graph is illustrated which describes the asymptotic behavior of the simple genetic algorithm.
In addition to the theoretical analysis experimental results for the simple genetic algorithm with α-selection,
uniform crossover and bitwise mutation are presented.
1 INTRODUCTION
As specific instances of random heuristic search
(RHS), genetic algorithms mimic biological evolu-
tion and molecular genetics in simplified form (Vose,
1999b). Genetic algorithms (GA) process popula-
tions of individuals which evolve according to selec-
tion and genetic operators like crossover and muta-
tion (Holland, 1992). The algorithm’s stochastic dy-
namics can be described with the help of a dynamical
system model introduced by VOSE et al. (Reeves and
Rowe, 2003; Vose, 1999b; Vose, 1999a). The pop-
ulation trajectory is attracted by the fixed points of
an underlying deterministic heuristic function which
also yields the expected next population. However,
even for moderate problem sizes the calculation of the
fixed points is difficult.
The simple genetic algorithm (SGA) with α-
selection recently introduced in (Neubauer, 2009;
Neubauer, 2008a; Neubauer, 2008c; Neubauer,
2008b) allows to explicitly derive the fixed points of
the heuristic function. In this selection scheme, the
best or α-individual is mated with individuals ran-
domly chosen from the current population with uni-
form probability. For the simple genetic algorithm
with α-selection it is further possible to formulate an
intrinsic system model which is compatible with the
equivalence relation imposed by schemata. The in-
trinsic system model provides a means to analyze the
genetic algorithm’s exploitation and exploration of
the search space due to the mixing operation caused
by crossover and mutation irrespective of the fitness
function.
This paper gives an overview of the theoretical re-
sults for the simple genetic algorithm with α-selection
and its intrinsic system model. It further outlines the
connection to the fixed point graph which describes
the asymptotic behavior of the simple genetic algo-
rithm. In addition to the theoretical analysis experi-
mental results are presented. The paper is organized
as follows. The simple genetic algorithm with α-
selection is described as a specific instance of random
heuristic search in Sect. 2 based on the notion of the
best individual randomly mating with other individ-
uals in the current population. In Sect. 3 the corre-
sponding dynamical system model is derived based
on which the intrinsic system model of the simple ge-
netic algorithm with α-selection is formulated in Sect.
4. Simulation results for the simple genetic algorithm
with α-selection, uniform crossover and bitwise mu-
281
Neubauer A..
SIMPLE GENETIC ALGORITHM WITH a-SELECTION - Intrinsic System Model, Fixed Points and the Fixed Point Graph.
DOI: 10.5220/0003113802810288
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 281-288
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

tation are presented showing a close agreement be-
tween theory and experiment. The fixed point graph
of the simple genetic algorithm with α-selection is il-
lustrated in Sect. 5. A brief conclusion and an outline
of future research is given in Sect. 6.
2 SIMPLE GENETIC
ALGORITHM WITH
α-SELECTION
In this section, the simple genetic algorithm with α-
selection, uniform crossover and bitwise mutation is
described following the notation and definition of the
simple genetic algorithm (SGA) in (Vose, 1999b). It
is assumed that the genetic algorithm is used for the
maximization of a fitness function f : Ω → R which is
defined over the search space Ω = Z
ℓ
2
= {0, 1}
ℓ
con-
sisting of binary ℓ-tuples (a
0
,a
1
,.. .,a
ℓ−1
).
Each binary ℓ-tuple (a
0
,a
1
,..., a
ℓ−1
) =
a
0
a
1
...a
ℓ−1
will be identified with the integer
a = a
0
· 2
ℓ−1
+ a
1
· 2
ℓ−2
+ . .. + a
ℓ−1
· 2
0
leading
to the search space Ω = {0,1, ...,n − 1} with
cardinality |Ω| = n = 2
ℓ
. The fitness values are
given by f(a) = f
a
. Based on the binary number
representation the bitwise modulo-2 addition a ⊕ b,
bitwise modulo-2 multiplication a ⊗ b and bitwise
binary complement a are defined. Vice versa,
the integer a ∈ Ω is viewed as a column vector
(a
0
,a
1
,... ,a
ℓ−1
)
T
. The all-one ℓ-tuple 1 corresponds
to the integer n − 1 = 2
ℓ
− 1. The indicator function
is defined by [i = j] = 1 if i = j and 0 if i 6= j.
2.1 Algorithm
The simple genetic algorithm with α-selection works
over populations P(t) defined as multisets of r indi-
vidual binary ℓ-tuples a(t) ∈ Ω. For the creation of
offspring individuals in each generation t genetic op-
erators like crossover χ
Ω
and mutation µ
Ω
are applied
to parental individuals (see Fig. 1).
2.2 α-Selection
For the α-selection scheme let
b(t) = argmax{ f
i
: i ∈ P(t)} (1)
be the best individual or α-individual in the current
population P(t). In the simple genetic algorithm with
α-selection the α-individual b(t) is mated with indi-
viduals randomly chosen from the current population
P(t) with uniform probability r
−1
.
t := 0;
initialize population P(0);
while end of adaptation 6= true do
select α-individual b(t) as first parent;
for the creation of r offspring do
select second parent c(t) randomly;
apply crossover χ
Ω
and mutation µ
Ω
a(t + 1) := µ
Ω
(χ
Ω
(b(t), c(t)));
end
increment t := t + 1;
end
Figure 1: Simple genetic algorithm with α-selection
(Neubauer, 2009; Neubauer, 2008a; Neubauer, 2008c;
Neubauer, 2008b).
2.3 Mixing
The crossover operator χ
Ω
: Ω × Ω → Ω randomly
generates an offspring ℓ-tuple a = (a
0
,a
1
,... ,a
ℓ−1
)
according to a = χ
Ω
(b,c) with crossover probabil-
ity χ from two ℓ-tuples b = (b
0
,b
1
,... ,b
ℓ−1
) and
c = (c
0
,c
1
,... ,c
ℓ−1
). With the crossover mask m ∈ Ω
the ℓ-tuples
a = b⊗ m⊕ m⊗ c (2)
or
a = b⊗ m⊕ m⊗ c (3)
are generated one of which is chosen as offspring a
with equal probability 2
−1
. For uniform crossover
the crossover mask m is randomly chosen from Ω
according to the probability distribution vector χ =
(χ
0
,χ
1
,... ,χ
n−1
)
T
with (Vose, 1999b)
χ
m
=
1− χ+ χ · 2
−ℓ
, m = 0
χ· 2
−ℓ
, m > 0
. (4)
The bitwise mutation operator µ
Ω
: Ω → Ω,
which randomly flips each bit of the ℓ-tuple a =
(a
0
,a
1
,... ,a
ℓ−1
) with mutation probability µ, is de-
fined with the help of the mutation mask m ∈ Ω ac-
cording to µ
Ω
(a) = a ⊕ m. The mutation mask m is
randomly chosen from Ω according to the probability
distribution vector µ = (µ
0
,µ
1
,... ,µ
n−1
)
T
with (Vose,
1999b)
µ
m
= µ
1
T
m
· (1− µ)
ℓ−1
T
m
. (5)
A typical value of the mutation probability is µ ∼
1
ℓ
.
3 DYNAMICAL SYSTEM MODEL
In the dynamical system model (Vose, 1999b) the
dynamics of the simple genetic algorithm is com-
pactly formulated by defining the population vector
ICEC 2010 - International Conference on Evolutionary Computation
282

p = (p
0
, p
1
,... , p
n−1
)
T
. Each component
p
i
=
1
r
∑
j∈P
[ j = i] (6)
gives the proportion of the element i∈ Ω in the current
population P. The population vector p is an element
of the simplex
Λ =
(
p ∈ R
n
: p
i
≥ 0∧
∑
i∈Ω
p
i
= 1
)
. (7)
For a population of size r the number of possible pop-
ulation vectors is given by
n+r−1
r
. In the limit of in-
finite populations with r → ∞ the population vectors
are dense in the simplex Λ. For simplicity we will take
the simplex Λ as the defining region of the population
vector p which is strictly valid only for large popula-
tions with r ≫ 1 in the sense of an infinite population
model.
The simple genetic algorithm is now described as
an instance of RHS τ : Λ → Λ according to p(t + 1) =
τ(p(t)) with τ depending on the random selection and
genetic operators. As outlined in (Vose, 1999b) τ
can be equivalently represented by a suitable heuristic
function G : Λ → Λ which for a given population vec-
tor p yields the probability distribution G (p). This
probability distribution
G (p)
i
= Pr{individual i is sampled from Ω} (8)
is used to generate the next population p(t+1) in gen-
eration t + 1 from the population p(t) in generation t
as illustrated in Fig. 2. The transition probabilities of
the RHS τ are given by the formula (Vose, 1999b)
Pr{τ(p) = q} = r!
∏
i∈Ω
G (p)
rq
i
i
(rq
i
)!
. (9)
p(t)
p(t + 1)
G (p(t))
G
τ
sample in Ω
Figure 2: Simple genetic algorithm as RHS τ with heuristic
function G .
The trajectory p, τ(p), τ
2
(p), ... approximately
follows the trajectory p, G (p), G
2
(p), ... of the de-
terministic dynamical system defined by the heuristic
function G with
E{τ(p)} = G (p) . (10)
Because of the corresponding mean quadratic devia-
tion
E{kτ(p) − G (p)k
2
} =
1
r
·
1− kG (p)k
2
(11)
the RHS τ behaves like the deterministic dynamical
system model in the limit of infinite populations with
r → ∞. As illustrated by experimental evidence the
RHS τ shows punctuated equilibria, i.e. phases of rel-
ative stability nearby a fixed point ω = G (ω) of the
heuristic function G disrupted by sudden transitions
to another dynamical equilibrium near another fixed
point. We call this the fixed point hypothesis of ge-
netic algorithms.
3.1 Heuristic
In the simple genetic algorithm with α-selection the
α-individual
b = argmax{ f
i
: i ∈ Ω∧ p
i
> 0} (12)
is selected as the first parent for creation of a new off-
spring, whereas the second parent is chosen uniformly
at random from the current population according to
the probability distribution p
j
over Ω with j ∈ Ω. The
heuristic function G (p) follows to
G (p)
i
=
∑
j∈Ω
p
j
· Pr{µ
Ω
(χ
Ω
(b, j)) = i} . (13)
The probability distributions for crossover χ
Ω
and
mutation µ
Ω
lead to
Pr{µ
Ω
(χ
Ω
(b, j)) = i} = (14)
∑
u,v∈Ω
µ
v
·
χ
u
+ χ
u
2
· [b⊗ u⊕ u⊗ j = i⊕ v] .
By defining the n× n mixing matrix (Vose, 1999b)
M
i, j
=
∑
u,v∈Ω
µ
v
·
χ
u
+ χ
u
2
· [i⊗ u⊕ u⊗ j = v] (15)
this yields Pr{µ
Ω
(χ
Ω
(b, j)) = i} = M
i⊕b,i⊕ j
and fi-
nally
G (p)
i
=
∑
j∈Ω
p
j
· M
i⊕b,i⊕ j
. (16)
With the permutation matrix (σ
b
)
i, j
= [i⊕ j = b] and
the twist (M
∗
)
i, j
= M
i⊕ j,i
of the symmetric mixing
matrix M = M
T
the new population vector is given
by
q = G (p) = σ
b
· M
∗
· σ
b
· p . (17)
This dynamical system model is illustrated in Fig. 3.
SIMPLE GENETIC ALGORITHM WITH a-SELECTION - Intrinsic System Model, Fixed Points and the Fixed Point
Graph
283

p
q
σ
b
M
∗
σ
b
Figure 3: Dynamical system model of the simple genetic
algorithm with α-selection (Neubauer, 2008a).
3.2 Mixing Matrix
The calculation of the mixing matrix M can be carried
out efficiently with the help of the WALSH transform
(Vose and Wright, 1998). For a matrix M the WALSH
transform is
b
M = W · M · W with the n × n WALSH
matrix W
i, j
= n
−1/2
· (−1)
i
T
j
. The WALSH matrix W
is symmetric and orthogonal, i.e. W
−1
= W
T
= W.
The WALSH transform of a vector v yields
b
v = W · v.
In Fig. 4 the WALSH matrix W is illustrated for n =
2
6
= 64.
Figure 4: Illustration of the WALSH matrix W for n = 2
6
=
64.
For crossover and bitwise mutation the WALSH
transform of the mixing matrix M is given by (Vose,
1999b)
b
M
i, j
= [i⊗ j = 0]· (18)
(1− 2µ)
1
T
(i⊕ j)
2
∑
k∈Ω
i⊗ j
χ
k⊕i
+ χ
k⊕ j
with
Ω
k
= {i ∈ Ω : i⊗ k = 0} . (19)
Due to the factor [i⊗ j = 0] the components
b
M
i, j
are
nonzero only if i⊗ j = 0 or j ∈ Ω
i
, respectively. The
WALSH transform of the twist of the mixing matrix
can be calculated from
M
∗∧
i, j
=
b
M
i⊕ j, j
. (20)
4 INTRINSIC SYSTEM MODEL
The matrix σ
b
·M
∗
·σ
b
of the dynamical system model
of the simple genetic algorithm with α-selection in
Eq. (17) depends on the mixing matrix M and the
α-individual b. Because of σ
−1
b
= σ
b
this yields the
equivalent formulation
σ
b
q = M
∗
· σ
b
p . (21)
The permuted population vector σ
b
p develops ac-
cording to the matrix M
∗
which is independent of
the α-individual b. The matrix M
∗
defines the in-
trinsic system model of the genetic algorithm with α-
selection (Neubauer, 2008a).
4.1 Fixed Point
The fixed points of the intrinsic system model are
obtained from the eigenvectors of M
∗
to eigenvalue
λ = 1, i.e.
ω = M
∗
· ω . (22)
The fixed points of the heuristic function G of the dy-
namical system model follow from the permutation
σ
b
ω for a given α-individual b. For the fixed point
analysis of the dynamical system model it therefore
suffices to analyze the intrinsic system model shown
in Fig. 5.
p
q
M
∗
Figure 5: Intrinsic system model of the genetic algorithm
with α-selection (Neubauer, 2008a).
To this end, the WALSH transform of both sides of
the equation q = M
∗
· p is taken yielding
b
q = W · q = W · M
∗
·W ·W · p = M
∗∧
·
b
p . (23)
For an eigenvector v with eigenvalue λ it follows
M
∗
· v = λ · v and equivalently M
∗∧
·
b
v = λ ·
b
v, i.e. the
matrix M
∗
and its WALSH transform M
∗∧
have the
same eigenvalues with eigenvectors which are also re-
lated by the WALSH transform.
For crossover and mutation the WALSH transform
of the mixing matrix fulfills
b
M
i, j
∝ [i⊗ j = 0], i.e.
b
M is
separative. M
∗∧
= M
∧∗∗
is a lower triangular matrix
the spectrum of which is given by the first column of
b
M (Vose, 1999b). Since the spectrum of M
∗
and its
WALSH transform M
∗∧
are the same this yields the
eigenvalues
λ
i
=
M
∗∧
i,i
=
b
M
0,i
. (24)
ICEC 2010 - International Conference on Evolutionary Computation
284
For crossover and bitwise mutation the eigenvalues
are given by
λ
i
=
(1− 2µ)
1
T
i
2
·
∑
k∈Ω
i
(χ
k
+ χ
k⊕i
) . (25)
Because of λ
0
= 1 and
0 ≤ λ
i
≤
1
2
− µ <
1
2
(26)
for 1 ≤ i ≤ n − 1 there exists a single eigenvector ω
which is a unique fixed point of the intrinsic system
model. For uniform crossover the eigenvalues are ob-
tained from
λ
i
= (1− 2µ)
1
T
i
·
χ· 2
−1
T
i
+
1− χ
2
(27)
for 1 ≤ i ≤ n − 1. The fixed points of the heuristic
function G of the simple genetic algorithm with α-
selection are obtained from the permutation σ
b
ω for a
given α-individual b. According to the fixed point hy-
pothesis the population will stay near this fixed point
σ
b
ω and converge to a new fixed point if a better α-
individual is found.
The unique fixed point ω of the intrinsic system
model can be determined explicitly with the help of
the WALSH transform. Due to the relation
b
ω = M
∗∧
·
b
ω and the lower triangular matrix M
∗∧
the WALSH
transform of the fixed point can be recursively calcu-
lated according to
b
ω
i
=
1
1−
b
M
0,i
·
i−1
∑
j=0
b
M
i⊕ j, j
·
b
ω
j
(28)
for 1 ≤ i ≤ n− 1 starting with
b
ω
0
= n
−1/2
(29)
which ensures
∑
i∈Ω
ω
i
= 1. The unique fixed point
ω is then obtained via the inverse WALSH transform
ω = W ·
b
ω.
The transition in one generation t from popula-
tion vector p(t) to population vector p(t + 1) of the
random heuristic search τ in Fig. 2 can be detailed
for the simple genetic algorithm with α-selection as
shown in Fig. 6. Under the assumption of the fixed
point hypothesis for the intrinsic system model the
permuted population vector σ
b(t)
p(t) will stay near
the unique fixed point ω. The population in gener-
ation t + 1 is therefore approximately sampled from
the search space Ω according to the probability dis-
tribution σ
b(t)
ω with time-independent fixed point ω
and α-individual b(t) as illustrated in Fig. 7.
p(t)
p(t + 1)
σ
b(t)
M
∗
σ
b(t)
p(t)
σ
b(t)
σ
b(t)
σ
b(t)
M
∗
τ
sample in Ω
Figure 6: Simple genetic algorithm with α-selection as RHS
τ with intrinsic system model M
∗
.
p(t) p(t + 1)
σ
b(t)
ω
ω
σ
b(t)
b(t)
τ
sample in Ω
Figure 7: Simple genetic algorithm with α-selection as RHS
τ with unique fixed point ω.
4.2 Convergence
The matrix M
∗
defining the intrinsic system model of
the simple genetic algorithm with α-selection has the
real eigenvalues λ
0
= 1 and 0 ≤ λ
i
≤
1
2
− µ <
1
2
for
1 ≤ i ≤ n− 1. The corresponding JORDAN canonical
form of M
∗
is given by
J = S
−1
M
∗
S . (30)
This matrix J consists of simple JORDAN sub-
matrices J
ν
i
(λ
i
) along the main diagonal and zeros
elsewhere, i.e.
J = diag
J
ν
0
(λ
0
),J
ν
1
(λ
1
),...,J
ν
κ−1
(λ
κ−1
)
(31)
with the κ distinct eigenvalues λ
i
each of algebraic
multiplicity ν
i
. The n columns s
j
of the JORDAN
canonical form J form a basis, i.e. the permuted pop-
ulation vector can be formulated as follows
σ
b(t)
p(t) =
n−1
∑
j=0
c
j
(t) · s
j
. (32)
SIMPLE GENETIC ALGORITHM WITH a-SELECTION - Intrinsic System Model, Fixed Points and the Fixed Point
Graph
285

The trajectory of the permutated population vec-
tor σ
b(t)
p(t) can be obtained from the intrinsic sys-
tem model of the genetic algorithm with α-selection
according to
σ
b(t)
p(t) = (M
∗
)
t
· σ
b(0)
p(0) . (33)
Using the expansion of this vector in the basis formed
by the columns of the JORDAN canonical form J this
leads to (Vose, 1999b)
σ
b(t)
p(t) = (34)
κ−1
∑
i=0
υ
i+1
−1
∑
j=υ
i
s
j
·
min{t, j−υ
i
}
∑
k=0
t
k
· λ
t−k
i
· c
j−k
(0)
with
υ
i
=
i−1
∑
j=0
ν
j
. (35)
The convergence of the permuted population vec-
tor σ
b(t)
p(t) to the unique stable fixed point ω of the
intrinsic system model of the simple genetic algo-
rithm with α-selection is determined by the eigenval-
ues λ
i
. Because of the single eigenvalue λ
0
= 1 with
algebraic multiplicity ν
0
= 1 and therefore υ
0
= 0,
υ
1
= 1 it follows
σ
b(t)
p(t) = s
0
· c
0
(0)+ (36)
κ−1
∑
i=1
υ
i+1
−1
∑
j=υ
i
s
j
·
min{t, j−υ
i
}
∑
k=0
t
k
· λ
t−k
i
· c
j−k
(0)
for t ≥ 1. With the remaining eigenvalues λ
i
for
1 ≤ i ≤ n− 1 the convergence properties of the sim-
ple genetic algorithm with α-selection can be charac-
terized by introducing the time constants τ
i
according
to
λ
t
i
= e
−t/τ
i
(37)
leading to
τ
i
= −
1
ln(λ
i
)
≤
2
1+ 2µ
< 2 (38)
by taking into account 0 ≤ λ
i
≤
1
2
−µ <
1
2
. Due to this
upper bound on the time constants τ
i
for 1 ≤ i ≤ n− 1
the permuted population vector σ
b(t)
p(t) rapidly con-
verges to the unique stable fixed point ω of the intrin-
sic system model of the simple genetic algorithm with
α-selection.
4.3 Experimental Results
In this section, the ONEMAX problem with fitness
function
f
i
= 1
T
i (39)
is considered, i.e. f
i
denotes the number of 1’s in the
binary representation of i ∈ Ω. A simple genetic algo-
rithm with α-selection using uniform crossover, bit-
wise mutation and random initial population is used
with the strategy parameters ℓ = 10, n = 2
ℓ
= 1024,
χ = 0.75, µ = ℓ
−1
and r = 100. The unique fixed point
ω of the intrinsic system model is shown in Fig. 8.
0 100 200 300 400 500 600 700 800 900 1000
0
0.05
0.1
0.15
0.2
0.25
i
ω
i
Figure 8: Fixed point of the intrinsic system model of the
simple genetic algorithm with α-selection.
The EUCLIDean distance of the simulated and per-
muted population vector σ
b(t)
p(t) in generation t to
the fixed point ω is given by
σ
b(t)
p(t) − ω
=
s
∑
i∈Ω
σ
b(t)
p(t)
i
− ω
i
2
.
(40)
In Fig. 9 this EUCLIDean distance is shown for one
simulation run. The permuted population vector
σ
b(t)
p(t) rapidly converges to the unique fixed point
ω of the intrinsic system model of the simple ge-
netic algorithm with α-selection and stays close to
this fixed point.
5 FIXED POINT GRAPH
The stable fixed points of the simple genetic algorithm
with α-selection are given by
ω
b
= σ
b
ω (41)
with the unique fixed point ω of the intrinsic system
model and b ∈ Ω. As shown in Sect. 4.3 the trajectory
of the simple genetic algorithm with α-selection stays
near the fixed points σ
b
ω according to the fixed point
hypothesis.
We will now formulate the connection of the dy-
namical system model and its fixed points to the fixed
ICEC 2010 - International Conference on Evolutionary Computation
286

0 10 20 30 40 50 60 70 80 90 100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
kσ
b(t)
p(t) − ωk
Figure 9: EUCLIDean distance kσ
b(t)
p(t) − ωk over gener-
ation t for the simple genetic algorithm with α-selection.
point graph which describes the asymptotic behavior
of the simple genetic algorithm (Vose, 1999b). Due
to the nature of this paper as a position paper, the fol-
lowing is more speculative than the preceding results.
To this end, let F be the set of fixed points ω
b
= σ
b
ω
with b ∈ Ω, i.e.
F = {ω
0
,ω
1
,..., ω
n−1
} (42)
= {σ
0
ω,σ
1
ω,... ,σ
n−1
ω} .
According to (Vose, 1996; Vose, 1999b) the RHS
τ can be modeled by a meta level MARKOV chain C
over the fixed points ω
b
= σ
b
ω. Let ρ = p
0
,p
1
,... ,p
l
be a path of length l of population vectors in the sim-
plex Λ. The corresponding cost of this path is defined
as
|ρ| =
l
∑
k=1
α
p
k−1
,p
k
(43)
with
α
p,q
=
∑
k∈Ω
q
k
· ln
q
k
(G (p))
k
. (44)
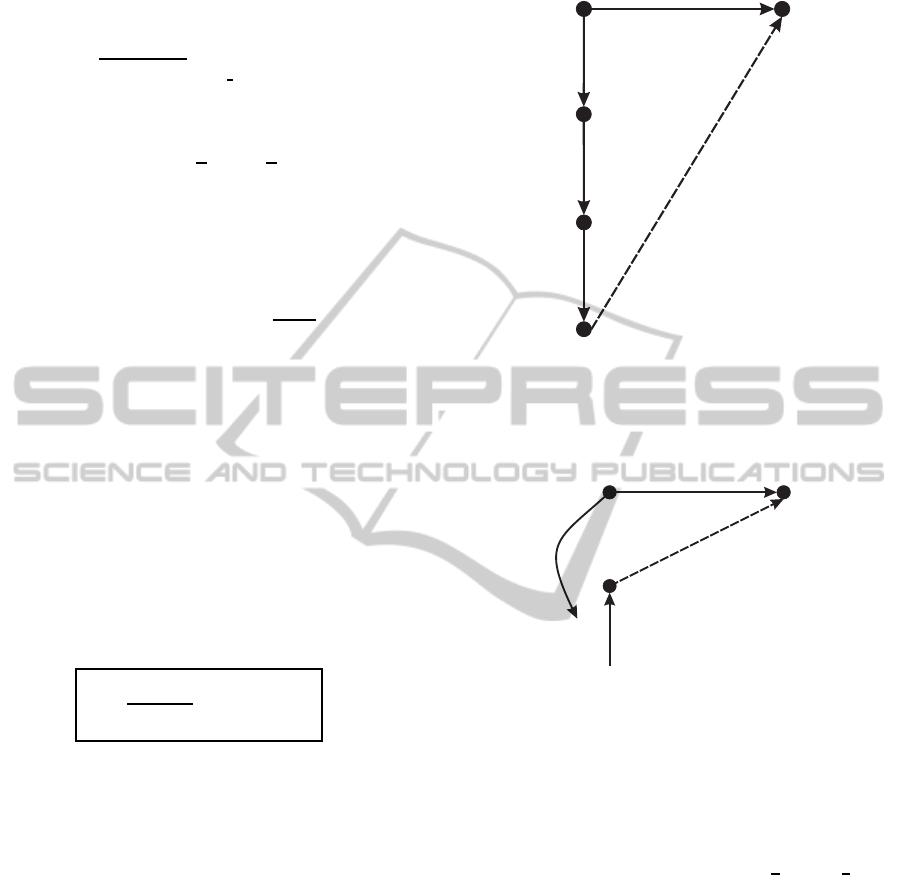
ω
0
ω
i
ω
j
ρ
ω
i
,ω
j
ρ
ω
j
,ω
i
ρ
ω
0
,ω
i
ρ
ω
i
,ω
0
ρ
ω
0
,ω
j
ρ
ω
j
,ω
0
Figure 10: Fixed point graph of the simple genetic algo-
rithm with α-selection as RHS τ.
The fixed point graph shown in Fig. 10 is defined
as the complete directed graph on the set of stable
fixed points F with weights
ρ
ω
i
,ω
j
= inf
|ρ| : ρ is a path from ω
i
to ω
j
. (45)
For infinite population size r → ∞ the steady state
distribution of the simple genetic algorithm as RHS
τ converges to the steady state distribution of the
Markov chain C over F . For the determination of
this steady state distribution we consider the so-called
tributary. The tributary T
k
is defined as the tree con-
taining every vertex of F with all its edges pointing
towards the root ω
k
. The cost of the tributary T
k
is
given by the sum of its edge weights ρ
ω
i
,ω
j
. As shown
by VOSE in (Vose, 1996; Vose, 1999b) for an infinite
population size r → ∞ the steady state distribution of
the simple genetic algorithm is given by the root ω
ι
of
the minimum cost tributary T
ι
(provided it exists).
Due to the simple structure of the dynamical sys-
tem model of the simple genetic algorithm with α-
selection and its stable fixed points ω
b
= σ
b
ω future
research will focus on the derivation of this steady
state distribution for the simple genetic algorithm
with α-selection. In view of the rapid convergence of
the simple genetic algorithm with α-selection, paths
ρ = ω
i
,p,ω
j
of length l = 2 from fixed point ω
i
= σ
i
ω
to fixed point ω
j
= σ
j
ω with interior point p ∈ Λ are
considered. The corresponding cost of this path is
given by
|ρ| = α
ω
i
,p
+ α
p,ω
j
or equivalently
|ρ| =
∑
k∈Ω
p
k
· ln
p
k
(G (ω
i
))
k
(46)
+
∑
k∈Ω
(ω
j
)
k
· ln
(ω
j
)
k
(G (p))
k
.
By taking into account
G (ω
i
)
k
= (ω
i
)
k
= ω
i⊕k
(47)
and
(ω
j
)
k
= ω
j⊕k
(48)
if follows
|ρ| =
∑
k∈Ω
p
k
·ln
p
k
ω
i⊕k
+
∑
k∈Ω
ω
j⊕k
·ln
ω
j⊕k
(G (p))
k
.
(49)
Under the simplifying assumption of paths ρ =
ω
i
,p,ω
j
of length 2 the weights of the fixed point
graph are then approximately given by
ρ
ω
i
,ω
j
= inf
(
∑
k∈Ω
p
k
· ln
p
k
ω
i⊕k
+ (50)
∑
k∈Ω
ω
j⊕k
· ln
ω
j⊕k
(G (p))
k
: p ∈ Λ
)
SIMPLE GENETIC ALGORITHM WITH a-SELECTION - Intrinsic System Model, Fixed Points and the Fixed Point
Graph
287

with
G (p)
k
=
∑
j∈Ω
p
j
· M
b⊕k, j⊕k
(51)
and
b = argmax{ f
i
: i ∈ Ω∧ p
i
> 0} . (52)
Future research will focus on the analytical derivation
of these weights ρ
ω
i
,ω
j
and the determination of the
minimum cost tributary T
ι
leading to the steady state
distribution ω
ι
of the simple genetic algorithm with
α-selection.
6 CONCLUSIONS
The intrinsic system model for the simple genetic al-
gorithm with α-selection simplifies the analysis of the
dynamical system model of genetic algorithms. It
is defined by the mixing matrix M and enables the
derivation of the unique fixed point ω. The simpli-
fications are gained because the fitness function f is
hidden from the mathematical formulation by making
use of the α-individual b. Since b enters the dynam-
ical system model via a permutation σ
b
according to
σ
b
· M
∗
· σ
b
the intrinsic system model can be formu-
lated with the help of the matrix M
∗
.
The intrinsic system model provides a means to
analyze the genetic algorithm’s exploitation and ex-
ploration of the search space Ω irrespective of the
fitness function f. This model is compatible with
the equivalence relation imposed by schemata as
shown in (Neubauer, 2008a) by explicitly deriving
the coarse-grained system model for a given schemata
family. Experimental results for the simple genetic
algorithm with α-selection, uniform crossover and
bitwise mutation presented in this paper show close
agreement to the theoretical predictions with respect
to the rapid convergence of the permuted population
vector σ
b
p to the unique fixed point ω obtained from
the intrinsic system model.
It is further conjectured that the structure of the
dynamical system model of the simple genetic algo-
rithm with α-selection and its intrinsic system model
simplify the determination of the steady state distri-
bution ω
ι
based on the fixed point graph and the min-
imum cost tributary T
ι
. The analysis of the fixed
point graph and the analytical derivation of its weights
ρ
ω
i
,ω
j
will be the focus of future research.
REFERENCES
Holland, J. H. (1992). Adaptation in Natural and Artificial
Systems – An Introductory Analysis with Applications
to Biology, Control, and Artificial Intelligence. First
MIT Press Edition, Cambridge.
Neubauer, A. (2008a). Intrinsic system model of the genetic
algorithm with α-selection. In Parallel Problem Solv-
ing from Nature PPSN X, Lecture Notes in Computer
Science, pages 940–949. Springer.
Neubauer, A. (2008b). Theory of genetic algorithms with α-
selection. In Proceedings of the 1st IAPR Workshop on
Cognitive Information Processing – CIP 2008, pages
137–141.
Neubauer, A. (2008c). Theory of the simple genetic algo-
rithm with α-selection. In Proceedings of the 10th
Annual Genetic and Evolutionary Computation Con-
ference – GECCO 2008, pages 1009–1016.
Neubauer, A. (2009). Simple genetic algorithm with gen-
eralised α
⋆
-selection. In Proceedings of the Inter-
national Joint Conference on Computational Intelli-
gence – IJCCI I2009, pages 204–209.
Reeves, C. R. and Rowe, J. E. (2003). Genetic Algorithms
– Principles and Perspectives, A Guide to GA Theory.
Kluwer Academic Publishers, Boston.
Vose, M. D. (1996). Modeling simple genetic algorithms.
Evolutionary Computation, 3(4):453–472.
Vose, M. D. (1999a). Random heuristic search. Theoretical
Computer Science, 229(1-2):103–142.
Vose, M. D. (1999b). The Simple Genetic Algorithm – Foun-
dations and Theory. MIT Press, Cambridge.
Vose, M. D. and Wright, A. H. (1998). The simple ge-
netic algorithm and the walsh transform – part i, the-
ory – part ii, the inverse. Evolutionary Computation,
6(3):253–273, 275–289.
ICEC 2010 - International Conference on Evolutionary Computation
288
