
Multi-Agent Systems: Theory and Application in
Organization Modelling
Joaquim Filipe
Escola Superior de Tecnologia do Instituto Politécnico de Setúbal
Rua Vale de Chaves, Estefanilha, 2910 Setúbal, Portugal
joaquim.filipe@estsetubal.ips.pt
1 Introduction
Organisations are multi-agent systems, eventually including both human and artificial
agents. Organisations are also seen as multilayered Information Systems (IS)
themselves, including an informal subsystem, a formal subsystem and a technical
system as shown in figure 1.
Fig. 1. Three main layers of the real information system [10].
We aim at improving the technical subsystem within the constraints defined by the
other two. Organisational information systems are inherently distributed, nowadays,
thus communication and coordination are major problems in this kind of information
systems. Perhaps motivated by the difficult problems there is currently a strong
interest on this area, which is an active research field for several disciplines, including
Distributed Artificial Intelligence (DAI), Organisational Semiotics and the Language-
Action Perspective, among others. Our approach integrates elements from these three
perspectives.
The Epistemic-Deontic-Axiologic (EDA) designation refers to the three main
components of the agent structure described in this paper. Here we propose an agent
model which, contrary to most DAI proposals, not only accounts for intentionality but
is also prepared for social interaction in a multi-agent setting. Existing agent models
emphasise an intentional notion of agency – the supposition that agents should be
INFORMAL IS: a sub-culture where meanings are established, intentions are understood,
beliefs are formed and commitments with responsibilities are made, altered and discharged
FORMAL IS: bureaucracy where form and rule replace meaning and intention
TECHNICAL IS: Mechanisms to automate part of the formal
system
Filipe J.
Multi-Agent Systems: Theory and Application in Organization Modelling.
DOI: 10.5220/0004466200030014
In Proceedings of the 4th International Workshop on Enterprise Systems and Technology (I-WEST 2010), pages 3-14
ISBN: 978-989-8425-44-7
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

understood primarily in terms of mental concepts such as beliefs, desires and
intentions. The BDI model [9] is a paradigm of this kind of agent.
We claim that the cognitive notions that constitute the basis of intentional models
show only one face of the coin, the other one being social agency. It is required that
an adequate agent model, able to function in a multi-agent setting, should emphasise
social agency and co-ordination, within a semiotics framework. Our approach focuses
on organisational agents who participate in organisational processes involving the
creation and exchange of signs, i.e. knowledge sharing, in a way that is inherently
public, thus depending on the agent’s social context, i.e. its information field [10], to
support co-ordinated behaviour. An information field is composed by all the agents
and objects involved in a certain activity and sharing a common ontology.
A realistic social model must be normative: both human agents and correctly
designed artificial agents ought to comply with the different kinds of norms that
define the information field where they operate, although exceptions may occur.
Private representations of this shared, normative, knowledge are translations of the
public knowledge into specific agent mental structures. When designing an artificial
agent, the designer must adopt a private knowledge representation paradigm to set up
the agent’s internal knowledge in such a way that it fits the normative shared
ontology.
We postulate that norms are the basic building blocks upon which it is possible to
build co-ordination among organised entities and co-ordinated actions are the crux of
organised behaviour. We claim that although organised activity is possible either with
or without communication, it is not possible without a shared set of norms. Therefore,
these socially shared norms define an information field that is a necessary condition
for heterogeneous multi-agent co-ordination including both artificial agents and
humans.
2 The Normative Structure of the EDA Model
Norms are typically social phenomena. This is not only because they stem from the
existence of some community but also because norms are multi-agent objects [5]:
• They concern more than one individual (the information field involves a
community)
• They express someone’s desires and assign tasks to someone else
• Norms may be regarded from different points of view, deriving from their
social circulation: in each case a norm plays a different cognitive role, be it a
simple belief, a goal, a value, or something else.
Social psychology provides a well-known classification of norms, partitioning them
into perceptual, evaluative, cognitive and behavioural norms. These four types of
norms are associated with four distinct attitudes, respectively [10]:
• Ontological – to acknowledge the existence of something;
• Axiologic – to be disposed in favour or against something in value terms;
• Epistemic – to adopt a degree of belief or disbelief;
• Deontic – to be disposed to act in some way.
4

Fig. 2. The EDA Agent Knowledge-Base Structure.
An EDA agent is a knowledge-based system whose knowledge base structure is
based on the following three components: the Epistemic, the Deontic and the
Axiologic.
The epistemic model component is where the knowledge of the agent is stored, in
the form of statements that are accepted by that agent. Two types of knowledge are
stored here: declarative knowledge – statements relative to the agent beliefs – and
procedural knowledge – statements concerning the know-how of the agent, e.g. their
plans and procedural abilities.
The importance of norms to action has determined the name we have chosen for
the model component where the agent goals are represented. An agent goal may be
simply understood as the desire to perform an action (which would motivate the
designation of conative) but it can also be understood, especially in a social context,
as the result of the internalisation of a duty or social obligation (which would
motivate the designation of deontic). We have adopted the latter designation not only
because we want to emphasise the importance of social obligations but also because
personal desires can be seen as a form of ‘generalised’ obligation established by an
agent for himself. This provides a unification of social and individual drives for
action, which simplifies many aspects of the model.
The axiologic model component contains the value system of the agent, namely a
partial order that defines the agent preferences with respect to norms. The importance
of the agent value system is apparent in situations of conflict, when it is necessary to
violate a norm. This preference ordering is dynamic, in the sense that it may change
whenever the other internal components of the agent model change, reflecting
different beliefs or different goals.
3 Intentions and Social Norms in the EDA Model
The multi-agent system metaphor that we have adopted for modelling organisations
implies that organisations are seen as goal-governed collective agents, which are
composed of individual agents.
In our model individual agents are autonomous, heterogeneous, rational, social
agents. Therefore, they are compelled to make decisions and act in a way that,
although not entirely deterministic, is constrained by their rationality. Actually their
behaviour would be predictable if we knew all the details of their EDA model
EDA Agent Knowledge-Base
Epistemic
Component
Deontic
Component
Axiologic
Component
5

components, the environment stimuli, their perception function and also the reasoning
machine they use, because the ultimate goal of a rational agent is to maximize its
utility.
Typically, artificial intelligence (AI) agent models consider intelligent agent
decision processes as internal processes that occur in the mind and involve
exclusively logical reasoning, external inputs being essentially data that are perceived
directly by the agent. This perspective does not acknowledge any social environment
whatsoever. In this paper we start from a totally different perspective, by emphasising
the importance of social influences and a shared ontology on the agent decision
processes, which then determines agents’ activity. We shall henceforth refer to agent
as ‘it’ although the EDA model also applies to human agents. In any case, we are
particularly interested in the situations where information systems are formally
described, thus making it possible for artificial agents to assist or replace human
agents.
An important role of norms in agent decision processes is the so-called cognitive
economy: by following norms the agent does not have to follow long reasoning chains
to calculate utilities – it just needs to follow the norms.
However, instead of adopting a whole-hearted social sciences perspective, which
is often concerned merely with a macro perspective and a statistical view of social
activity, we have adopted an intermediate perspective, where social notions are
introduced to complement the individualistic traditional AI decision models: a
psycho-social perspective, whereby an agent is endowed with the capability of
overriding social norms by intentionally deciding so.
Our model enables the relationship between socially shared beliefs with agent
individual, private, beliefs; it also enables the analysis of the mutual relationships
between moral values at the social level with ethical values at the individual level.
However, we have found particularly interesting analogies in the deontic component,
specifically in the nature of the entities and processes that are involved in agent goal-
directed behaviour, by inspecting and comparing both the social processes and
individual processes enacted in the deontic component of the EDA model.
This was motivated by the close relationship between deontic concepts and agency
concepts, and represents a direction of research that studies agency in terms of
normative social concepts: obligations, responsibilities, commitments and duties.
These concepts, together with the concepts of power/influence, contribute to facilitate
the creation of organisational models, and are compatible with a vision of
organisations as normative information systems as well as with the notion of
information field that underlies the organisational semiotics approach, on which the
work presented in this paper is inspired.
As will be explained in more detail in the next section, an essential aspect of the
EDA model is that the Deontic component is based on the notion of generalised goal
as a kind of obligation, that encompasses both social goals (social obligations) and
individual goals (self obligations). Following a traditional designation in DAI, we
designate those individual generalised goals that are inserted in the agenda as
achievement goals, as in [4]. Figure 3 describes the parallelism between mental and
social constructs that lead to setting a goal in the agenda, and which justifies the
adoption of the aforementioned generalised obligation. Here, p represents a
proposition (world state).
()Bp
α
represents p as one of agent
α
’s beliefs.
()Op
β
α
6

Fig. 3. Social and Individual goals parallelism in the EDA model.
represents the obligation that
α
must see to it that p is true for
β
.
()Op
α
α
represents
the interest that
α
has on seeing to it that p is true for itself – a kind of self-imposed
obligation. In this diagram
(,)
p
WD
α
∈Ε
means, intuitively, that proposition p is
one of the goals on
α
’s agenda.
Interest is one of the key notions that are represented in the EDA model, based on
the combination of the deontic operator ‘ought-to-be’ [14] and the agentive ‘see-to-it-
that’ stit operator [1]. Interests and Desires are manifestations of Individual Goals.
The differences between them are the following:
• Interests are individual goals of which the agent is not necessarily aware,
typically at a high abstraction level, which would contribute to improve its
overall utility. Interests may be originated externally, by other agents’
suggestions, or internally, by inference: deductively (means-end analysis),
inductively or abductively. One of the most difficult tasks for an agent is to
become aware of its interest areas because there are too many potentially
advantageous world states, making the full utility evaluation of each potential
interest impossible, given the limited reasoning capacity of any agent.
• Desires are interests that the agent is aware of. However, they may not be
achievable and may even conflict with other agent goals; the logical
translation indicated in the figure,
() ( ())Op BOp
αα
ααα
∧
, means that desires
are goals that agent
α
ought to pursue for itself and that it is aware of.
However, the agent has not yet decided to commit to it, in a global
perspective, i.e. considering all other possibilities. In other words, desires
Individual Goal
Social
Obligation
Interest
()Op
α
α
Duty
()Op
β
α
Origin:
- Other agents
- Inference
Origin:
- Social roles
- Inference
Desire
() ())(Op BOp
αα
αα
α
∧
Demand
() ())(Op BOp
ββ
αα
α
∧
Intention
(,)pWD
α
∈Ε
Agenda
Achievement
Goals
External Internal (in EDA)
Awarene
s
7

become intentions only if they are part of the preferred extension of the
normative agent EDA model [7].
It is important to point out the strong connection between these deontic concepts
and the axiologic component. All notions indicated in the figure should be interpreted
from the agent perspective, i.e. values assigned to interests are determined by the
agent. Eventually, external agents may consider some goal (interest) as having a
positive value for the agent and yet the agent himself may decide otherwise. That is
why interests are considered here to be the set of all goals to which the agent would
assign a positive utility, but which it may not be aware of. In that case the
responsibility for the interest remains on the external agent.
Not all interests become desires but all desires are agent interests. This may seem
contradictory with a situation commonly seen in human societies of agents acting in
others’ best interests, sometimes even against their desires: that’s what parents do for
their children. However, this does not mean that the agent desires are not seen as
positive by the agent; it only shows that the agent may have a deficient axiologic
system (by its information field standards) and in that case the social group may give
other agents the right to override that agent. In the case of artificial agents such a
discrepancy would typically cause the agent to be banned from the information field
(no access to social resources) and eventually repaired or discontinued by human
supervisors, due to social pressure (e.g. software viruses).
In parallel with Interests and Desires, there are also social driving forces
converging to influence individual achievement goals, but through a different path,
based on the general notion of social obligation. Social obligations are the goals that
the social group where the agent is situated require the agent to attain. These can also
have different flavours in parallel to what we have described for individual goals.
• Duties are social goals that are attached to the particular roles that the agent is
assigned to, whether the agent is aware that they exist or not. The statement
()Op
β
α
means that agent
α
ought to do p on behalf of another agent
β
.
Agent
β
may be another individual agent or a collective agent, such as the
society to which
α
belongs. Besides the obligations that are explicitly
indicated in social roles, there are additional implicit obligations. These are
inferred from conditional social norms and typically depend on
circumstances. Additionally, all specific commitments that the agent may
agree to enter also become duties; however, in this case, the agent is
necessarily aware of them.
• Demands are duties that the agent is aware of
1
. This notion is formalised by
the following logical statement:
() ( ())Op BOp
ββ
ααα
∧
. Social demands
motivate the agent to act but they may not be achievable and may even
conflict with other agent duties; being autonomous, the agent may also decide
that, according to circumstances, it is better not to fulfil a social demand and
rather accept the corresponding sanction. Demands become intentions only if
they are part of the preferred extension of the normative agent EDA model –
see [7] section 5.7 for details.
1
According to the Concise Oxford Dictionary, demand is “an insistent and peremptory request,
made as of right”. We believe this is the English word with the closest semantics to what we need.
8
• Intentions: Whatever their origin (individual or social) intentions constitute a
non-conflicting set of goals that are believed to offer the highest possible
value for the concerned agent. Intentions are designated by some authors [11]
as psychological commitments (to act). However, intentions may eventually
(despite the agent sincerity) not actually be placed in the agenda, for several
reasons:
o They may be too abstract to become directly executed, thus requiring
further means-end analysis and planning.
o They may need to wait for their appropriate time of execution.
o They may be overridden by higher priority intentions.
o Required resources may not be ready.
The semantics of the prescriptive notions described above may be partially
captured using set relationships as depicted in figure 4, below.
Fig. 4. Set-theoretic relationships among deontic prescriptive concepts.
When an agent decides to act in order to fulfil an intention, an agenda item is
created – we adopt the designation of achievement goal. Achievement goals are
defined as in [4] as goals that are shared by individuals participating in a team that has
a joint persistent goal. Following the terminology of [4] agent
α
has a weak
achievement goal, relative to its motivation (which in our case corresponds to the
origin and perceived utility of that goal), to bring about the joint persistent goal
γ
if
either of the following is true:
•
α
does not yet believe that
γ
is true and has
γ
being eventually true as a
goal (i.e.
α
has a normal achievement goal to bring about
γ
)
•
α
believes that
γ
is true, will never be true or is irrelevant (utility below the
motivation threshold), but has a goal that the status of
γ
be mutually
believed by all team members.
However we do not adopt the notion of joint persistent goal for social co-
ordination, as proposed by Cohen and Levesque [4] because their approach has a
number of shortcomings, not only theoretical but also related to the practical
feasibility of their model, which are well documented in [12].
Interests
Desires
Duties
Demands
Intentions
Agenda
Achiev.
Goals
9
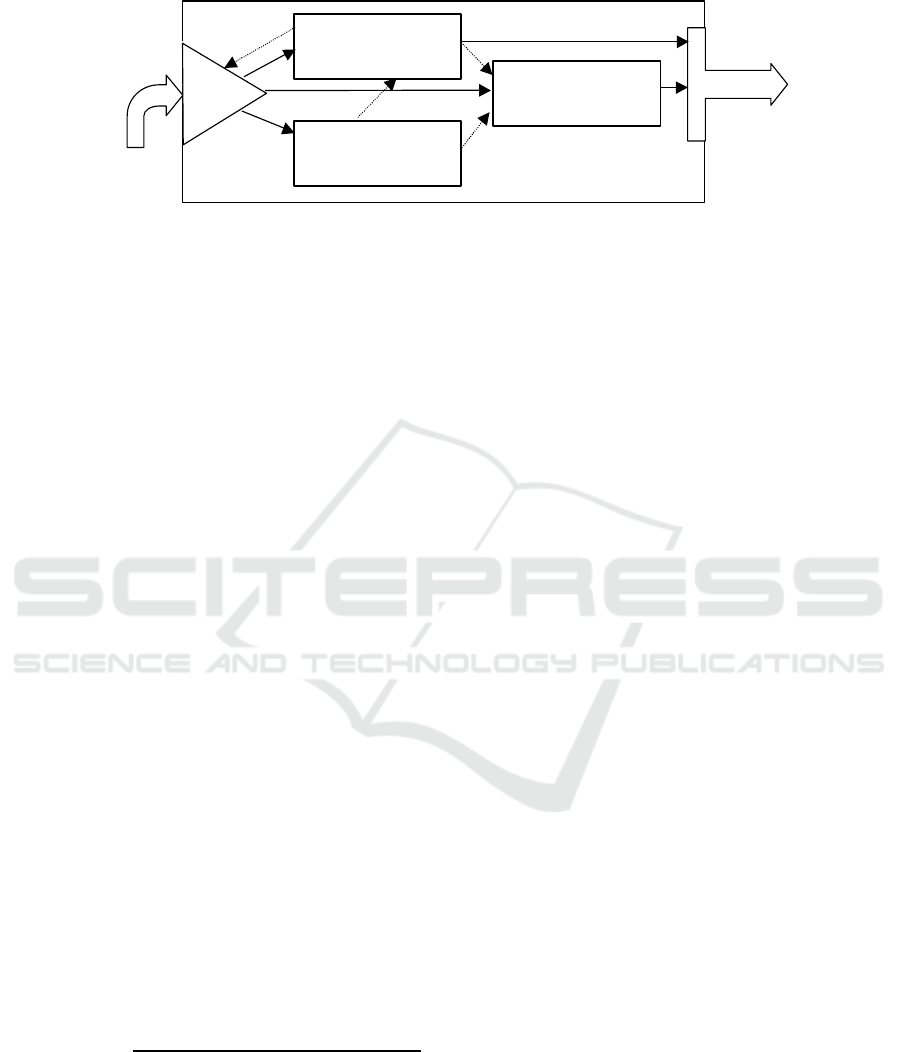
Fig. 5. The EDA model component relationships.
4 The EDA Model Internal Architecture
Using the social psychology taxonomy of norms, and based on the assumption that
organisational agents’ behaviour is determined by the evaluation of deontic norms,
given the agent epistemic state, with axiological norms for solving eventual interest
conflicts, we propose an intentional agent model, which is decomposed into three
main components: the epistemic, the deontic and the axiologic. Additionally there are
two external interfaces: an input (perceptual) interface, through which the agent
receives and pragmatically interprets messages from the environment and an output
(acting) external interface through which the agent acts upon the environment, namely
sending messages to other agents
2
.
A socially shared ontology is partially incorporated in an agent cognitive model
whenever it is needed, i.e. when the agent needs to perform a particular role. In this
case, beliefs are incorporated in the Epistemic component, obligations and
responsibilities are incorporated in the Deontic component and values (using a partial
order relation of importance) are incorporated in the Axiologic component – all
indexed to the particular role that the agent is to play.
Figure 5 depicts the EDA model and its component relationships.
Ψ is a pragmatic function that filters perceptions, according to the agent ontology,
using perceptual and axiologic norms, and updates one or more model
components.
∑ is an axiologic function that is used mainly in two circumstances: to help decide
which signs to perceive, and to help decide which goals to put in the agenda and
execute.
Κ is a knowledge-based component, where the agent stores its beliefs both
explicitly and implicitly, in the form of potential deductions based on logical
reasoning.
Δ is a set of plans, either explicit or implicit, the agent is interested in and may
choose to execute.
The detailed description of each component, including its internal structure, is
provided in [7]. In this paper we focus on the system behaviour. The next sections
2
In this paper we restrict our attention to the semiotic, symbolic, types of agent activity, ignoring
substantive physical activities.
action
perception
Axiological Component
∑
(values)
Epistemic Component
Κ
(knowledge)
Deontic Component
Δ
(behavior)
Ψ
10

show how in EDA we specify ideal patterns of behaviour and also how we represent
and deal with non-ideal behaviours.
5 Organisational Modelling with Multi-Agent Systems using the
EDA Model
The EDA model may apply to both human and artificial agents, and is concerned with
the social nature of organisational agents:
-
Firstly, because it accounts for a particular mental structure (Epistemic-
Deontic-Axiologic) that is better, for our purposes, than other agent mental
structures proposed in the literature to model agent interaction. Specifically,
we intend to use it for modelling information fields where social norms
influence individual agents and are used by an agent to guide inter-subjective
communication and achieve multi-agent co-ordination.
-
Secondly, because the model is based on normative notions that are not only
intended to guide the agent behaviour in a socially accepted way, but also to
identify what sanctions to expect from norm violations, in order to let the
agent take decisions about its goals and actions, especially when co-
ordination is involved. The EDA model is based on the claim that multi-
agent notions such as social commitment, joint intentions, teamwork,
negotiation and social roles, would be merely metaphorical if their normative
character were not accounted for.
Given its social-enabled nature, the EDA agent notion may be used to model and
implement social activities, involving multi-agent co-ordination. However, although
the agent paradigm described in this paper is suited to model team work and joint
problem solving, the major novelty with respect to other current agent models is the
normative flavour. EDA agents are able to co-ordinate on the basis of shared norms
and social commitments. Shared norms are used both for planning and for reasoning
about what is expected from other agents but, internally, EDA agents keep an
intentional representation of their own goals, beliefs and values.
Co-ordination is based on commitments to execute requested services.
Commitments are represented not as joint intentions based on mutual beliefs, as is the
case of the Cohen-Levesque model, upon which the BDI paradigm is based, but as
first-class social concepts, at an inter-subjective level. The organisational memory
embedded in the representation of socially accepted best-practices or patterns of
behaviour and the handling of sub-ideal situations is, in our opinion, one of the main
contributions that a multi-agent system can bring about.
6 Representing Ideal and non-Ideal Patterns of Behaviour
The EDA model is a norm-based model. Norms are ultimately an external source of
action control. This assumption is reflected specially in the Deontic component of the
EDA model.
11

Standard Deontic Logic (SDL) represents and reasons about ideal situations only.
However, although agent behaviour is guided by deontic guidelines, in reality an
agent who always behaves in an ideal way is seldom seen. The need to overcome the
limited expressiveness of SDL, and to provide a way to represent and manipulate sub-
ideal states has been acknowledged and important work has been done in that
direction, e.g. by Dignum et al. [6] and also by Carmo and Jones [2].
Contrary to SDL, the Deontic component of the EDA model is designed to handle
sub-ideal situations. Even in non-ideal worlds, where conflicting interests and
obligations co-exist, we wish to be able to reason about agent interests and desirable
world states in such a way that the agent still is able to function coherently.
Behaviours may be represented as partial plans at different abstract levels. A goal
is a very high abstract plan, whereas a sequence of elementary actions defines a plan
at the instance level. The Deontic component is similar, in this sense, to what Werner
[13] called the agent intentional state.
However, in our model, agent decisions depend both on the available plans and a
preference relationship defined in the axiologic component. This value assignment,
which is essential for determining agent intentions, i.e. its preferred actions, can
change dynamically, either due to external events (perception) or to internal events
(inference), thus dynamically modifying the agent’s intentions.
Although our representation of ideal behaviours is based in deontic logic, we
acknowledge the existence of problems with deontic logic, partially caused by the fact
that the modal ‘ought’ operator actually collapses two operators with different
meanings, namely ‘ought-to-do’ and ‘ought-to-be’. Our solution, inspired in [8] and
[1], is to use a combination of action logic and deontic logic for representing agentive
‘ought-to-do’ statements, leaving the standard deontic operator for propositional,
declarative, statements. Agentive statements are represented as
[
]
:
s
tit Q
α
where
α
stands for an agent and Q stands for any kind of sentence (declarative or agentive).
An ‘ought-to-do’ is represented using the conventional ‘ought-to-be’ modal operator
combined with an agentive statement, yielding statements of the form
[]
:OstitQ
α
or, for short:
()OQ
α
.
The representation of behaviours using this kind of agentive statement has several
attractive properties, including the fact that it is a declarative representation (with all
the flexibility that it provides) and that there exists the possibility of nesting plans as
nested stits.
A plan is typically given to the agent at a very abstract level, by specifying the
goal that it ought to achieve. The agent should then be able to decompose it into
simple, executable, actions. This decomposition can be achieved by a means-ends
process. By representing plans declaratively, as behavioural norms, the process
becomes similar to backward chaining reasoning from abstract goals to more specific
ones, until executable tasks are identified, the same way as in goal oriented reasoning
in knowledge-based systems. This similarity enables the adoption of methods and
tools from that area, being especially useful the inference engine concept.
However, the Deontic component does not control the Agenda directly, i.e. it is
not responsible for setting the agent goals directly, because the prospective agent
goals – similar to desires, in the BDI model – must be analysed by the Axiologic
12

component first, which computes their value accordingly to an internal preference
relation, taking into account possible obligation violations.
7 Conclusions
The EDA model is a norm-based, theoretically sound, agent model that takes into
account not only the intentional aspects of agency but also the social norms that
prescribe and proscribe certain agent patterns of behaviour. The main components of
this model (Epistemic, Deontic and Axiological) have a direct relationship with the
types of norms that are proposed in the social psychology theory supporting the
model. In this paper, however, we focused our attention essentially in the Deontic
component, where the normative social aspects are more important, namely where
ideal and sub-ideal behaviours are represented.
We consider agents to be goal-governed systems. All agent goals can be
represented as obligations, encompassing both agent self-imposed obligations and
social obligations – derived from moral obligations or commitments established in the
course of their social activity.
Organizations can be seen as multi-agent systems with the EDA internal
architecture based on deontic agency notions making it easier to understand some
social aspects that in other agent models can only be modelled indirectly through
joint-goals.
References
1. Belnap, N., 1991. Backwards and Forwards in the Modal Logic of Agency. Philosophy and
Phenomenological Research, vol. 51.
2. Carmo, J. and A. Jones, 1998. Deontic Logic and Contrary to Duties. Personal copy of a
pre-print manuscript.
3. Castelfranchi, C., 1993. Commitments: from Individual Intentions to Groups and
Organisations. In Working Notes of AAAI’93 Workshop on AI and Theory of Groups and
Organisations: Conceptual and Empirical Research, pp.35-41.
4. Cohen, P. and H. Levesque, 1990. Intention is Choice with Commitment. Artificial
Intelligence, 42:213-261.
5. Conte, R., and C. Castelfranchi, 1995. Cognitive and Social Action, UCL Press, London.
6. Dignum, F., J-J Ch. Meyer and R.Wieringa, 1994. A Dynamic Logic for Reasoning About
Sub-Ideal States. In J.Breuker (Ed.), ECAI Workshop on Artificial Normative Reasoning,
pp.79-92, Amsterdam, The Netherlands.
7. Filipe, J., 2000. Normative Organisational Modelling using Intelligent Multi-Agent
Systems. Ph.D. thesis, University of Staffordshire, UK.
8. Hilpinen, R., 1971. Deontic Logic: Introductory and Systematic Readings. Reidel
Publishing Co., Dordrecht, The Netherlands.
9. Rao, A. and M. Georgeff, 1991. Modeling Rational Agents within a BDI architecture.
Proceedings of the 2nd International Conference on Principles of Knowledge
Representation and Reasoning (Nebel, Rich, and Swartout, Eds.) pp.439-449. Morgan
Kaufman, San Mateo, USA.
13

10. Stamper, R., 1996. Signs, Information, Norms and Systems. In Holmqvist et al. (Eds.),
Signs of Work, Semiosis and Information Processing in Organizations, Walter de Gruyter,
Berlin, New York.
11. Singh, M., 1990. Towards a Theory of Situated Know-How. 9th European Conference on
Artificial Intelligence.
12. Singh, M., 1996. Multiagent Systems as Spheres of Commitment. Proceedings of the
International Conference on Multiagent Systems (ICMAS) - Workshop on Norms,
Obligations and Conventions. Kyoto, Japan.
13. Werner, E., 1989. Cooperating Agents: A Unified Theory of Communication and Social
Structure. In Gasser and Huhns (Eds.), Distributed Artificial Intelligence, pp.3-36, Morgan
Kaufman, San Mateo, USA.
14. von Wright, G., 1951. Deontic Logic. Mind, 60, pp.1-15.
14
