
AN ADAPTIVE SINGLE FREQUENCY PHASE VOCODER FOR
LOW-POWER HEART RATE DETECTION
Development of a Fast and Low-power Heart Rate Estimation Algorithm for Mobile
Phone Applications
Walter Karlen, Guy Dumont
Electrical and Computer Engineering in Medicine (ECEM), The University of British Columbia, Vancouver, Canada
Chris Petersen, Jennifer Gow, J. Mark Ansermino
Pediatric Anesthesia Research Team (PART), BC Children’s Hospital, Vancouver, Canada
Keywords:
Pulse detection, Heart rate estimation, Mobile phones, Embedded systems, Photoplethysmography, Vocoder.
Abstract:
Mobile phones can be used as a platform for clinical decision making in resource-poor and remote areas. Their
limited battery and computational resources, however, demand efficient and low-power algorithms. We present
a new algorithm for the fast and economical estimation of heart rate (HR) from the photoplethysmogram (PPG)
recorded with a pulse oximeter connected to a mobile phone. The new method estimates the HR frequency by
adaptively modeling the PPG wave with a sine function using a modified phase vocoder. The obtained wave is
also used as an envelope for the detection of peaks in the PPG signal. HR is either computed using the vocoder
center frequency or the peak intervals in a histogram. Experiments on a mobile device show comparable
speed performance with other time domain algorithms. Preliminary tests show that the HR computed from
the vocoder center frequency is robust to Noise in the PPG. The instantaneous HR calculated with the vocoder
peak detection method was more sensitive to short-term HR variations than the vocoder center frequency
method. These results point to further developments using a combination of both HR estimation methods that
will enable the robust implementation of adaptive phase vocoders into mobile phone applications.
1 INTRODUCTION
Mobile health technology is a rapidly advancing field
that holds great promise for improving medical ser-
vices and changing the way that health care is de-
livered. A common theme in this area is the use of
general purpose consumer devices, in particular smart
phones. An increasing number of health care applica-
tions use these mobile platforms to interface directly
to physiological sensors, such as heart rate (HR) de-
tectors. While this reduces or eliminates the cost of
custom embedded hardware, features such as an in-
creased noise level, limited battery and computational
resources, and the requirement for on-line processing
challenge the accurate, real-time detection of physio-
logical parameters, such as HR peaks.
In this paper, we consider the extraction of heart
rate (HR) from a photoplethysmography (PPG) signal
that originates from an oximeter sensor interfaced to
a smart phone. We propose a novel approach to com-
pute HR from the PPG signal based on a dynamically
adapted, single frequency phase vocoder algorithm.
This algorithm is intended to form a core engine for
more complex mobile signal analyzers within a fully
functional low-cost, smart phone-based pulse oxime-
ter.
1.1 Related Work
The traditional methods used for peak detection in the
ECG signal for HR estimation, which have a long his-
tory in biomedical signal processing, can be applied
to PPG signals. HR estimation algorithms operate ei-
ther in the time or the frequency domain. Common
time domain algorithms include linear and non-linear
filters, artificial neural networks, genetic algorithms,
filter banks, and heuristic methods based on nonlin-
ear transforms. Frequency domain algorithms include
various wavelet and Fourier transforms. However, not
all of these methods are suitable for on-line computa-
30
Karlen W., Dumont G., Petersen C., Gow J. and Mark Ansermino J..
AN ADAPTIVE SINGLE FREQUENCY PHASE VOCODER FOR LOW-POWER HEART RATE DETECTION - Development of a Fast and Low-power
Heart Rate Estimation Algorithm for Mobile Phone Applications.
DOI: 10.5220/0003134200300035
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2011), pages 30-35
ISBN: 978-989-8425-37-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

tion (Kohler et al., 2002). In particular, algorithms
must be computationally efficient for mobile applica-
tions, where power and computational resources are
limited. Algorithms are commonly trimmed in or-
der to achieve computational efficiency (Kohler et al.,
2002). However, this comes at the expense of accu-
racy and performance. Our aim was to design an ac-
curate HR estimation algorithm for PPG that requires
low processing power so as to be suitable for battery-
powered mobile applications.
2 ALGORITHM DEVELOPMENT
Since cardiac signals are quasi periodic, a time-
frequency transformation algorithm could be appro-
priate to extract HR. However, Fourier or wavelet
based transformations on time series require segmen-
tation of the signal, which is not always practical in an
on-line, low-cost system. Their relatively high pro-
cessing power and memory usage requirements add
to this unsuitability. Instead, we propose to operate in
the time domain, using a methodology inspired by the
phase vocoder originally developed for the compres-
sion of voice signals in telecommunications (Flana-
gan et al., 1965). In this method, a vocoder models
the input signal with one or multiple sinusoidal waves
that vary in time. The parameters that have to be es-
timated are the time varying amplitude and frequency
of each sine wave that comprises the original signal.
The phase vocoder can be seen as a filter bank con-
sisting of a series of band-pass filters with successive
center frequencies (Dolson, 1986).
In our case, we are solely interested in the dom-
inant frequency in the signal (the heart beat). It is,
therefore, sufficient to represent the input signal by
only one sinusoidal wave that varies over time. The
filter-bank with a distinguished set of frequencies is
replaced with a single band-pass filter whose center
frequency is adapted over time. This can be achieved
by scanning the incoming signal and computing the
difference in phase. The obtained frequency parame-
ter, where the system eventually locks-in, can be seen
as a filtered frequency of the incoming signal that
would correspond to an averaged HR. The method
can also find the location in time of each heart beat
by using the output sine wave as an envelope to locate
maximal peaks in the input waveform.
2.1 Algorithm Description
The raw PPG signal is high-pass filtered to remove
the baseline using a second-order Butterworth filter
with a cut-off frequency at 0.5 Hz (Figure 1-1). The
filtered signal is then routed into two parallel streams.
The signal is multiplied by a sine wave in one stream
and by a cosine wave in the other (Figure 1-2). Co-
sine and sine waves have the same unitary amplitude
and frequency w
v
. The frequency w
v
is set to the es-
timated vocoder frequency of the previous iteration
(Figure 1-8). The two parallel streams are, therefore,
identical with the exception of the π/2 shifted phase
of the multiplying waveform. This step creates a new
signal that is composed of two periodic signals with
shifted frequencies of ±w
v
as follows:
cos(w
v
∗t) ∗cos(w
s
∗t) =
cos((w
s
−w
v
) ∗t) + cos((w
s
+ w
v
) ∗t),
(1)
where w
s
is the frequency of the incoming wave at
timestep t. Next, each of the two streams is fed to
a moving average low-pass filter (Figure 1-3). The
application of this heterodyning step has two effects.
First, input frequencies in proximity of the vocoder
frequency w
v
are shifted down close to DC and are
allowed to pass the filter. All other frequency compo-
nents will also be shifted but they will not go through
the low-pass filter. Secondly, the heterodyning pro-
vides a way to compute the time-varying amplitude
and frequency of the resulting signal in the next step.
The two filtered waveforms are subsequently trans-
formed from Cartesian to Polar coordinates to obtain
a single amplitude r
v
and phase θ
v
(Figure 1-4). The
amplitude is calculated as the square root of the sum
of the squares of the two heterodyned signals as fol-
lows:
r
v
= 4 ∗
q
y
2
sin
∗y
2
cos
, (2)
where y
sin
and y
cos
are the heterodyned signals for the
sine and the cosine streams, respectively. Similarly,
θ
v
at each point in time t is the angle whose tangent
is the ratio of the vertical to the horizontal position as
follows:
θ
v
= arctan(
y
sin
y
cos
). (3)
The phase is subsequently unwrapped. The real time-
varying frequency of the original wave is then esti-
mated by computing the difference between the ac-
tual and previous phase (Figure 1-5), and subtracting
it from the current center frequency (Figure 1-6) as
follows:
ˆw
s
= w
v
= w
(t
−1
)
v
−∆θ, (4)
where ∆θ = θ
(t
−1
)
v
−θ
v
. The amplitude and the newly
computed center frequency are used to compute the
vocoder output y
out
(Figure 1-7) as follows:
y
out
= r
v
∗sin(2 ∗π ∗w
v
∗t). (5)
The output signal frequency w
v
is also used to esti-
mate the instantaneous HR. Algorithm 1 shows a pos-
sible implementation of the adaptive single-frequency
phase vocoder in pseudo C code.
AN ADAPTIVE SINGLE FREQUENCY PHASE VOCODER FOR LOW-POWER HEART RATE DETECTION -
Development of a Fast and Low-power Heart Rate Estimation Algorithm for Mobile Phone Applications
31

1
5
7
43
8 6
2
r
θ
w
z
∆θ
z
Figure 1: Operation of the adaptive single-frequency phase
vocoder: (1) high-pass filter to remove DC value, (2) het-
erodyning the input with both a sine and a cosine wave in
parallel, and a (3) low-pass filter, (4) converting the two sig-
nals from rectangular to polar coordinates and unwrapping
the angular-position values, (5) subtracting successive un-
wrapped angular-position values, (6) subtracting the phase-
difference from the previous center frequency to obtain the
new center frequency, (7) generating the vocoder output
wave for peak detection, and (8) feeding the center fre-
quency back into the heterodyne function.
Algorithm 1: Adaptive Phase Vocoder.
1: initialization
2: while TRUE do
3: val = input
4: val ← highpass(val)
5: y
sin
← lowpass(val ∗sin( f req
−1
∗t));
6: y
cos
← lowpass(val ∗cos( f req
−1
∗t));
7: phase ← unwrap(atan2(y
sin
,y
cos
), phase
−1
)
unwrap the phase
8: ampl ← 4 ∗
√
y
sin
∗y
sin
+ y
cos
∗y
cos
9: f req ← f req
−1
−(phase
−1
−phase) adjust
frequency to lock onto the waveform
10: if f req < 0.00001 then clamp to avoid
negative frequency values
11: f req ← 0.00001
12: end if
13: end while
To detect the location of the HR peaks, the mono-
phone sinusoidal vocoder output y
out
is used as an in-
dicator of the approximate location of the peaks in
the actual PPG waveform. The simple form of the
vocoder waveform reduces the problem of detecting
peaks in the noisy PPG signal to a straight-forward
search for the maximum amplitude within the tem-
poral interval of a positive half cycle of the vocoder
output signal. The time elapsed from the previously
detected peaks is binned into a moving histogram of
heart rate intervals. This serves to eliminate artifacts
caused by motion and other spurious effects, with the
largest histogram bin giving a direct representation of
the instantaneous HR. The sensitivity of this peak de-
tection method can be adjusted by offsetting the si-
nusoidal vocoder signal; a positive or negative offset
adjustment will result in a wider or narrower positive
half cycle interval, respectively.
2.2 Algorithm Validation
In order to test the algorithm, following institutional
review board approval, data was gathered from nine
children (1-7 years old, 14 kg ± 6.2) who underwent
general anesthesia. The recordings obtained included
ECG, capnometry, and PPG signals. All signals were
recorded with Collect S/5 software (Datex-Ohmeda,
Finland) using a sampling frequency of 300Hz. An 8-
minute segment of reliable recording of spontaneous
breathing was selected from each case. These seg-
ments are available from the on-line database Cap-
noBase.org (Karlen et al., 2010).
The ECG waveform was used as the reference
recording for computing HR. A technician indepen-
dently validated the reference measurement using the
CapnoBase Signal Evaluation Tool (Karlen et al.,
2010). The mean HR of a sliding window was calcu-
lated. The window size was set to 20 s; a size that cor-
responds to that commonly used in commercial pulse
oximeters.
The performance of the adaptive algorithm was
assessed using the normalized root mean square
(NRMS) error (%) of the calculated HR from the
vocoder output frequency. The NRMS error corre-
sponds to the square root of the sum of the squares
of the differences between the test and reference HR
measurements, divided by the sum of the reference
measurements:
NRMS error =
q
∑
n
i=1
(x
re f
i
−x
alg
i
)
2
∗n
∑
n
i=1
x
re f
i
. (6)
A measurement error was calculated for each test
measurement by comparing it with the reference mea-
surement that was nearest to it in time. The first 50s
were used to initialize the high-pass filters and the
vocoder sliding window, and so were not analyzed.
To evaluate the computational load of the algo-
rithm executed on a mobile device, we built a pro-
totype device consisting of a PureLight medium soft
sensor connected to an Xpod OEM module (Nonin,
Plymouth, USA) (Figure 2). The module was con-
nected to a 2
nd
generation iPod Touch (Apple, Cuper-
tino, USA). The iPod Touch displayed the PPG wave-
form and recorded the continuous data stream. The
PPG was recorded with a 16bit resolution at a sam-
pling rate of 75 Hz. The algorithm was implemented
in C and embedded into the iOS application software,
called Phone Oximeter
1
, to process the raw PPG sig-
nal in real-time. The computational load was mea-
1
http://www.phoneoximeter.org
BIODEVICES 2011 - International Conference on Biomedical Electronics and Devices
32

Figure 2: Phone Oximeter (Mobile phone pulse oximeter)
application. 1) Soft finger probe; 2) Nonin Xpod OEM
pulse oximeter module; 3) raw PPG waveform display on
iPod Touch; 4) SpO2 value computed by the Xpod module;
5) HR computed by the adaptive vocoder algorithm.
sured in microseconds using interrupts during pro-
gram execution.
For comparison, we implemented into the iOS ap-
plication two other HR estimation methods. The first
used the Pan-Tompkins algorithm (Pan and Tomp-
kins, 1985). This time domain based method makes
use of a cascade of band-pass filter, integrator, squar-
ing, and differentiators. An adaptive threshold was
applied to detect the heart beat pulses. The second
method calculated the power spectral density with a
Fast Fourier Transform (FFT) algorithm from (Press
et al., 1992) that was implemented in the C library
from (Goldberger et al., 2000). A 50s window size
was selected, border effects were reduced using a
Hamming windowing function, and the maximum
power band was chosen to estimate the HR. The FFT
was recalculated every second by shifting the window
by 75 samples.
3 RESULTS
The parameters used in the adaptive vocoder algo-
rithm are shown in Table 1.
With an average NRMS error of 3.33% (Table
2), the HR calculated directly from the vocoder out-
put frequency was accurate. However, two cases ex-
hibited higher NRMS error than the others (0030l
Table 1: Algorithm configuration parameters.
Parameter Value
heterodyne low-pass cut-off frequency 0.04 Hz
initial vocoder frequency w
(0)
v
50 Hz
initial vocoder amplitude r
(0)
v
1
number of histogram bins 32
Table 2: Normalized root mean square (NRMS) error be-
tween the reference HR obtained from ECG and the HR
estimated by the vocoder frequency or vocoder peak detec-
tion method respectively. The last column is the mean ECG
HR used for calculating the NRMS error.
Case HR NRMS error mean HR
[%] [bpm]
vocoder vocoder ECG
freq peak
0009l 3.4979 1.7496 92.5807
0015l 0.5915 0.6440 108.454
0018l 0.5170 1.2345 127.149
0023l 2.3822 1.3859 92.3054
0028l 2.4448 2.8312 66.4234
0030l 6.8719 4.3432 107.406
0032l 2.3679 2.8300 77.2644
0035l 2.9794 1.4727 102.547
0038l 8.3220 1.2452 108.462
Average 3.3305 1.9707 98.0658
and 0038l). Closer inspection of these cases illus-
trates that reduced performance of the vocoder fre-
quency HR is mainly due to its low responsiveness to
a rapidly changing HR of more than 10bpm (Figure 3
and 4).
With an average NRMS error of 1.97% (Table 2),
the HR calculated from the vocoder peak detection
using histograms was more accurate than the vocoder
frequency estimations. The disagreement between
ECG reference HR and HR obtained from vocoder
peak detection resulted from a delay in the HR estima-
tion of the latter; a 5s to 10s delay observed through-
out these cases can be attributed to the size of the his-
togram for HR calculation. Cases 0028l, 0030l, and
0032l showed greater decreases in performance than
the mean of the cases. In these cases, the poor quality
of the PPG signal prevented the vocoder peak detec-
tion algorithm from accurately estimating HR (Figure
3). The vocoder peak detection was able to track fast
variations and compensate for the low responsiveness
of the direct vocoder frequency calculation.
The adaptive vocoder algorithm including peak
detection required an average of 47.33 us to pro-
cess a new value, which was slower than the Pan-
Tompkins algorithm (Table 3). Both were signifi-
cantly faster than the inter-sampling distance of 13.3
AN ADAPTIVE SINGLE FREQUENCY PHASE VOCODER FOR LOW-POWER HEART RATE DETECTION -
Development of a Fast and Low-power Heart Rate Estimation Algorithm for Mobile Phone Applications
33
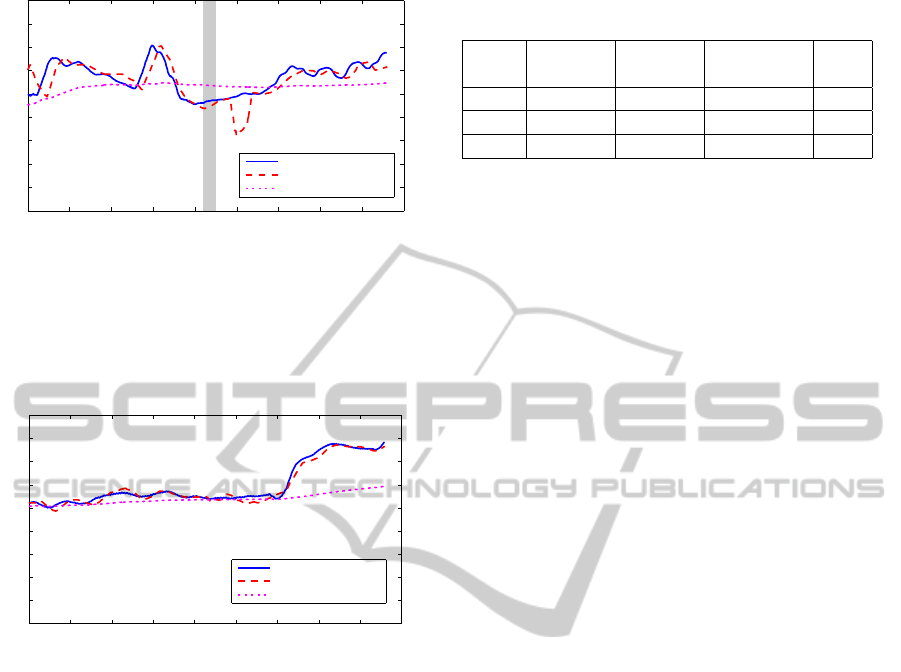
PPG Artifacts
50 100 150 200 250 300 350 400 450 500
60
70
80
90
100
110
120
130
140
150
time [s]
heart rate [bpm]
Case 0030l
HR (ECG)
HR (vocoder peak)
HR (vocoder freq)
Figure 3: HR agreement comparison for Case 0030l. The
HR calculated by the vocoder peak method is degraded af-
ter a time offset (at 300s) when the raw PPG signal was cor-
rupted with noise over a certain period of time (gray bar).
The HR estimated by the vocoder frequency is smoothed
out and does not respond quickly to large variations in HR.
50 100 150 200 250 300 350 400 450 500
60
70
80
90
100
110
120
130
140
150
time [s]
heart rate [bpm]
Case 0038l
HR (ECG)
HR (vocoder peak)
HR (vocoder freq)
Figure 4: HR agreement comparison for Case 0038l. The
HR estimated by the vocoder frequency does not respond
rapidly to a large permanent change in HR after 350s. The
HR calculated by the vocoder peak method is accurately
following the ECG HR trend.
ms. The algorithms can be computed in real-time on
the phone while sufficient processing power is avail-
able for other computing tasks. The FFT HR esti-
mation method was about 40 times slower than the
vocoder algorithm (Table 3).
4 DISCUSSION
We can conclude from these preliminary tests that the
major design criteria of accuracy and on-line capabili-
ties for a mobile phone HR estimation algorithm were
met. With an average accuracy of 1.97% NRMS, the
HR prediction is acceptable for a mobile device. The
speed tests show that the proposed algorithm achieves
this within the range of traditional filtering methods
and faster than frequency domain-based approaches.
The adaptive vocoder frequency output filtered
short variations in HR and PPG artifacts effectively.
Table 3: Algorithm execution time per sample on the iPod
Touch calculated over 16 measurements of one minute.
Vocoder Vocoder Pan- FFT
freq peak Tompkins
[us] [us] [us] [us]
Mean 41.25 47.33 28.84 1937
SD 0.9 0.8 0.45 4.06
However, the algorithm was not able to detect large,
rapid changes in HR and lock into the new frequency
in a reasonable amount of time. The vocoder respon-
siveness could be improved by tuning the cut-off fre-
quency of the low-pass filter shown in Figure 1-3. On
the other hand, the vocoder peak detection method
was able to rapidly track changes in HR. However,
this attribute made it more vulnerable to errors when
the PPG was corrupted with noise.
It is, therefore, evident that the advantages and
drawbacks of the two approaches are complemen-
tary. A logical step would be the combined use of
these vocoder based HR extraction methods. A sys-
tem that detects short-term variations with the peak
detection and long-term trends with the vocoder fre-
quency could provide increased diagnostic informa-
tion.
A desired improvement to the vocoder peak HR
estimation algorithm is to reduce the delay that was
introduced by the histogram detection algorithm. We
also plan to increase its robustness to poor quality
PPG signals by adding a signal quality index to the al-
gorithm. Active detection of poor signal will prevent
the erroneous HR output and increase overall estima-
tion performance.
Although we compared processing speed of dif-
ferent HR estimation algorithms when embedded into
a mobile device, we did not compare the estimation
performance between these methods in this study. We
plan to proceed with a performance comparison as
soon we have implemented the suggested improve-
ments in a prototype device. This will allow us to
conduct clinical studies for validation on an increased
number of cases.
5 CONCLUSIONS
A novel approach to compute HR based on a dynam-
ically adapted, single frequency phase vocoder algo-
rithm was proposed. Initial experiments showed good
accuracy and low computational costs for the sug-
gested approach. The robustness of the algorithm to-
wards noise in the plethysmogram waveform was an-
other strength. This makes the algorithm suitable to
process on-line PPG signals that are recorded from an
BIODEVICES 2011 - International Conference on Biomedical Electronics and Devices
34

oximeter sensor interfaced to a smart phone. We in-
tend to use the algorithm as a core engine for more
complex mobile signal analyzers (i.e. for the estima-
tion of heart rate variability or respiratory rate) within
a smart phone based pulse oximeter. The suggested
algorithm has the potential to be applied to other pe-
riodic signals whose frequency range has to be deter-
mined in real-time.
REFERENCES
Dolson, M. (1986). The Phase Vocoder: A Tutorial. Com-
puter Music Journal, 10(4):14–27.
Flanagan, J. L., Meinhart, D. I. S., Golden, R. M., and
Sondhi, M. M. (1965). Phase Vocoder. The Journal
of the Acoustical Society of America, 38(5):939–940.
Goldberger, A. L., Amaral, L. A. N., Glass, L., Hausdorff,
J. M., Ivanov, P. C., Mark, R. G., Mietus, J. E., Moody,
G. B., Peng, C.-K., and Stanley, H. E. (2000). Phys-
ioBank, PhysioToolkit, and PhysioNet: Components
of a New Research Resource for Complex Physiologic
Signals. Circulation, 101(23):e215—-e220.
Karlen, W., Turner, M., Cooke, E., Dumont, G., and Anser-
mino, J. M. (2010). CapnoBase: Signal database and
tools to collect, share and annotate respiratory signals.
In Annual Meeting of the Society for Technology in
Anesthesia (STA), page 25, West Palm Beach.
Kohler, B., Hennig, C., and Orglmeister, R. (2002). The
principles of software QRS detection. IEEE Engineer-
ing in Medicine and Biology Magazine, 21(1):42–57.
Pan, J. and Tompkins, W. J. (1985). A real-time QRS de-
tection algorithm. IEEE transactions on bio-medical
engineering, 32(3):230–6.
Press, W., Teukolsky, S., Vetterling, W., and Flannery, B.
(1992). Numerical recipes in C: the art of scientific
computing. Cambridge University Press, New York,
2nd edition.
AN ADAPTIVE SINGLE FREQUENCY PHASE VOCODER FOR LOW-POWER HEART RATE DETECTION -
Development of a Fast and Low-power Heart Rate Estimation Algorithm for Mobile Phone Applications
35
