
THE MAMDANI CONTROLLER IN PREDICTION
OF THE SURVIVAL LENGTH IN ELDERLY GASTRIC
PATIENTS
Hang Zettervall, Elisabeth Rakus-Andersson
Department of Mathematics and Science, Blekinge Institute of Technology, 371 79 Karlskrona, Sweden
Henrik Forssell
Blekinge Competence Center, 371 81 Karlskrona, Sweden
Keywords: Fuzzy control, Mamdani controller, Survival length for gastric cancer patients.
Abstract: Strict analytic formulas are the tools derived for determining the formal relationships between a sample of
independent variables and a variable which they affect. If we cannot formalize the function tying the
independent and dependent variables then we will utilize fuzzy control actions. The algorithm is particularly
adaptable to support the problem of prognosticating the survival length for gastric cancer patients. We thus
formulate the objective of the current paper as the utilization of fuzzy control action for the purpose of
making the survival prognoses.
1 INTRODUCTION
Expert-knowledge designs IF-THEN together with
assumptions of fuzzy set theory have given rise to
the creation of fuzzy control (Mamdani and Assilian,
1973; Nguyen et al., 2002; Andrei, 2005).
Typical applications of fuzzy control have
mostly concerned technical processes but, in the
current paper, we intend to prove fuzzy control to
make prognoses of the survival length in patients
with diagnosis gastric cancer.
In the first trials of survival approximation a
survival curve from censored data was introduced
(Kaplan and Meier, 1958). The model was used in
cancer patient examinations to estimate the length of
living (Newland et al., 1994). The Cox regression
(Cox, 1972) of life length prediction was developed
in such studies as logistic Cox regression (Sargent,
2001). The statistics-based models predicting the
survival were compared by Everitt and Rabe-
Hesketh (2001) who found such model
disadvantages as the lack of normal distribution or
missing values among survival times.
The development of computational intelligence
brought neural networks as a tool of approximating
the life length for cancer patients (Burke et al., 2001;
Grumett et al., 2003).
We prove the action of Mamdani controller,
which has not been adapted yet to estimation of
survival. We count on reliable results to place the
controller among other life approximation models.
2 VARIABLE FUZZIFICATION
Fuzzy control model is applied when we cannot
formalize the functional connection between
independent and dependent variables.
We expect to evaluate the survival length in
patients with diagnosis “gastric cancer”. Variable Z
= “survival length” is affected by X = “age” and Y =
“CRP-value”, selected as the most essential markers
of making the prognosis. Since the formula
(
)
yxfz ,
=
, x∈X, y∈Y, z∈Z, is not known then we
will test the action of fuzzy control.
All variables are divided into levels, which are
expressed by lists of terms. The terms are
represented by fuzzy sets, restricted by the
parametric s-functions lying over the variable
domains
[
]
maxmin
, xx
,
[
]
maxmin
, yy
and
[]
maxmin
, zz
.
283
Zettervall H., Rakus-Andersson E. and Forssell H..
THE MAMDANI CONTROLLER IN PREDICTION OF THE SURVIVAL LENGTH IN ELDERLY GASTRIC PATIENTS.
DOI: 10.5220/0003134402830286
In Proceedings of the International Conference on Bioinformatics Models, Methods and Algorithms (BIOINFORMATICS-2011), pages 283-286
ISBN: 978-989-8425-36-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

We introduce five levels into
X
,
Y
and
Z
,
denoted by X
i
, Y
j
and Z
k
, i, j, k = 0,...,4.
A family of fuzzy set membership functions
corresponding to X
i
will be expressed by the
parametric
s
-class functions
()
x
i
X
μ
split in
()
xleft
i
X
μ
and
()
xright
i
X
μ
(Rakus-Andersson,
2007; Rakus-Andersson et al., 2010) where
()
()()
()
()
()
()
()
()
()
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
⋅+≤≤⋅+−
−
⋅+−≤≤⋅+−
=
⋅+−
⋅+−−
,
if21
,
if2
min
2
min
2
2
minmin
2
min
min
ihxxihx
ihxxihhx
xleft
XX
h
h
ihxx
X
h
XX
h
ihhxx
X
X
X
X
X
X
XX
i
μ
(1)
and
()
()
()
()
()
()()
()
()
()
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
⋅++≤≤⋅++
⋅++≤≤⋅+
−
=
⋅++−
⋅+−
.
if2
,
if21
min
2
min
2
2
minmin
2
min
min
ihhxxihx
ihxxihx
xright
XXX
h
h
ihhxx
X
h
X
h
ihxx
X
X
X
XX
X
X
X
i
μ
(2)
Formulas (1) and (2) are affected by
min
x
and by
the parameter value h
X
, which measures the length
between the beginnings of two adjacent functions X
i
.
The h
X
quantity is adjusted to the number of X-
functions and to the distance between x
min
and x
max
.
The functions of Y
j
, j = 0,…,4, are constructed as
similar to (1) and (2) for the accommodated values
of parameters h
Y
and Y
min
to the conditions of Y.
The Z
k
’s functions
()
z
k
Z
μ
, k = 0,…,4, are split
in
()
zleft
k
Z
μ
,
(
)
zmiddle
k
Z
μ
and
()
zright
k
Z
μ
as
()
()
()
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⋅+≤≤⋅+−
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅+−≤≤⋅+−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
⋅+−
⋅+−−
,
if21
,
if2
min
4
min
2
4
min
2
min
2
2
2
min
2
min
khzzkhz
khzzkhz
zleft
ZZ
h
khzz
Z
h
Z
h
h
khzz
Z
Z
Z
h
Z
ZZ
Z
Z
Z
h
k
μ
(3)
()
,
2
if1
minmin
kh
h
zzkhz
zmiddle
Z
Z
Z
Z
k
⋅++≤≤⋅+
=
μ
(4)
and
(
)
(
)
()
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⋅++≤≤⋅++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅++≤≤⋅++
⎟
⎠
⎞
⎜
⎝
⎛
−
=
⋅++−
⋅++−
.
if2
,
if21
min
4
3
min
2
2
4
3
min
2
min
2
min
2
2
min
khhzzkhz
khzzkhz
zright
ZZZ
h
h
khhzz
Z
h
Z
h
khzz
Z
Z
Z
ZZ
ZZ
Z
h
Z
Z
h
k
μ
(5)
The parameter h
Z
allows designing five functions
of fuzzy sets from Z over [z
min
, z
max
].
Variable X will be restricted over [0, 100]. We
thus state
0
min
=
x
,
25
=
X
h
and
4,...,0=i
. For the
terms of “age” we will get by (1) and (2) the set of
membership functions sketched in Fig. 1.
-
20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120
0.2
0.4
0.6
0.8
1.0
(
)
x
i
X ""
μ
x
4
X
3
X
2
X
1
X
0
X
Figure 1: The membership functions for ”age”.
By inserting parameters of y
min
and h
Y
in (1) and
(2), where x is replaced by y, we generate the
membership functions for “CRP-value” over [0, 50]
with
15
=
Y
h
and j = 0,...,4 to plot them in Fig. 2.
y
-10 0 10 20 30 40 50 60 70
0.2
0.4
0.6
0.8
1.0
(
)
y
j
Y ""
μ
0
Y
1
Y
3
Y
4
Y
2
Y
Figure 2: The membership functions for ”CRP-value”.
The output variable
Z
takes the values in [0, 5].
We determine
1
=
Z
h
and set
4,...,0=k
in (3), (4)
and (5) to initialize the functions depicted in Fig. 3.
0 1 2 3 4 5
0.2
0.4
0.6
0.8
1.0
(
)
z
k
Z ""
μ
z
0
Z
4
Z
3
Z
2
Z
1
Z
Figure 3: The membership functions for the ”survival
length”.
BIOINFORMATICS 2011 - International Conference on Bioinformatics Models, Methods and Algorithms
284
3 THE LOGICAL RULES
IF-THEN AND OUTPUT
DEFUZIFICATION
After the fuzzification procedure we determine rules,
which link the states of two input variables to the
state of the output variable. We design Table 1 with
entries filled with terms of “survival length”.
Table 1: Rule base of fuzzy controller estimating “survival
length”.
X
i
\Y
j
Y
0
Y
1
Y
2
Y
3
Y
4
X
0
X
1
X
2
Z
2
X
3
Z
2
Z
1
Z
1
Z
1
Z
0
X
4
Z
1
Z
1
Z
0
Z
0
Z
0
Some entries in the table are empty, since the
essential data was lacking for younger people.
We want to make the survival prognosis for
()
yx,
, x∈X, y∈Y. Value
x
can belong to more than
one fuzzy set
i
X
with different membership degrees
()
x
i
X
μ
. Element
y
associated to x is a member of
some
j
Y
with degrees
(
)
y
j
Y
μ
. By means of the IF-
THEN statements from Table 1 we determine the
contents of rules
Rule
()
:
:, lyx
R
If
x
is
li
X
:
and
y
is
lj
Y
:
, then
z
is
lk
Z
:
,
(6)
where l is the rule number.
To evaluate the influence of the input variables
on the output consequences we estimate
()
(
)()
(
)
yx
lYlyx
jl
i
X
::,
,min
:
μ
μ
α
=
(7)
for each
li
X
:
and
lj
Y
:
concerning the choice of (x,y).
Consequences of all rules R
(x, y):l
become fuzzy
sets
conseq
lyx
R
:),(
, which are stated in Z as
()
()
()
()
(
)
zz
lZlyx
conseq
R
klyx
::,
,min
:,
μαμ
=
.
(8)
We aggregate the consequence sets
conseq
lyx
R
:),(
in
one common set
),( yx
conseq
allocated in Z over a
continuous interval [z
0
, z
n
] due to
()
()
()
(
)
zz
conseq
R
l
conseq
lyxyx :,),(
max
μμ
=
.
(9)
In order to assign a crisp value z to the selected
pair (x, y) we defuzzify the consequence fuzzy set
(9) in Z. We are furnished with the formula
()
()
()
∫
∫
⋅
==
n
n
z
z
conseq
z
z
conseq
dzz
dzzz
yxfz
0
0
,
μ
μ
.
(10)
Example
Let
77
=
x
and
16
=
y
. Age 77 belongs to fuzzy set
3
X
= “old”. Therefore, for i = 3, h
X
= 0.25 and x
min
= 0 the membership degree
()
=77
3
X
μ
9872.0
.
In
4
X
= “very old”
()
0128.077
4
=
X
μ
. CRP-
value y = 16 fits for sets:
1
Y
= “low” with
(
)
16
1
Y
μ
991.0
=
and
2
Y
= “medium” with
()
009.016
2
=
Y
μ
.
In accordance with (6) we find the rules
()
:
1:16,77
R
IF X is X
3
and Y is Y
1
THEN Z is Z
1
,
()
:
2:16,77
R
IF X is X
3
and Y is Y
2
THEN Z is Z
1
,
()
:
3:16,77
R
IF X is X
4
and Y is Y
1
THEN Z is Z
1
,
()
:
4:16,77
R
IF X is X
4
and Y is Y
2
THEN Z is Z
0
.
For
()
() ()
(
)
,9872.016,77min
1:1:1:16,77
13
=
=
YX
μ
μ
α
()
,009.0
2:16,77
=
α
()
0128.0
3:16,77
=
α
and
()
=
4:16,77
α
009.0
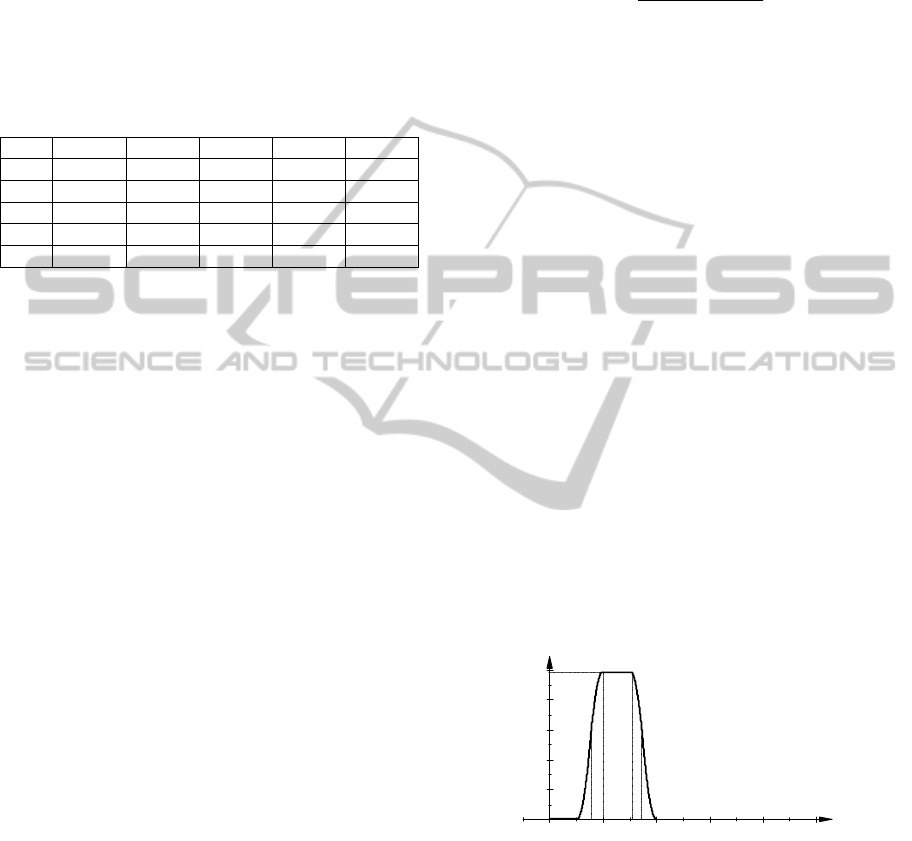
, due to (7), we establish consequence sets (8)
to determine the final consequence
),( yx
conseq
,
which fits for (9) and is shown in Fig. 4.
z
(
)
z
conseq
μ
0
z
1
z
2
z
3
z
4
z
5
z
6
z
Figure 4: The consequence set conseq
(77,16)
in Z.
Formula (10) constitutes a basis of an estimation
of the survival length expected when assuming
“age” = 77 and “CRP-value” = 16. Over interval [z
0
,
z
6
] = [0, 2], which contains characteristic points z
0
=
0, z
1
= 0.533, z
2
= 0.75, z
3
= 0.96, z
4
= 1.54, z
5
= 1.75
and z
6
= 2, we compute the z-prognosis
THE MAMDANI CONTROLLER IN PREDICTION OF THE SURVIVAL LENGTH IN ELDERLY GASTRIC
PATIENTS
285

05.1)16,77(
2
75.1
2
5335.0
0
2
75.1
2
5335.0
0
5.0
2
2009.0
5.0
2
2009.0
===
∫
⎟
⎠
⎞
⎜
⎝
⎛
−
++
∫
∫
⎟
⎠
⎞
⎜
⎝
⎛
−
++
∫
dz
z
dz
dzz
z
dzz
fz
"
"
The result converges with the physician’s own
judgment. For each pair (x,y) we can arrange new
actions of the fuzzy control algorithm to estimate the
patient’s period of surviving.
4 CONCLUSIONS
Fuzzy control system is a powerful method, which
mostly is applied to technologies controlling
complex processes by means of human experience.
In this work we have proved that the expected values
of patients’ survival lengths can be estimated even if
the mathematical formalization between independent
and dependent variables is unknown. For each x and
each y belonging to continuous spaces X and Y
respectively, we can repeat the control algorithm in
order to cover the space of pairs over the Cartesian
product of X and Y with a continuous surface.
We should emphasize that the Mamdani control
system does not need any special assumptions such
as distributions of variables, regularity and others,
which are necessary to be fulfilled in statistical
survival tests (see discussion in Section 1).
The authors’ special contribution is the
mathematically formalized design of membership
functions assisting variable levels.
ACKNOWLEDGEMENTS
The authors thank Blekinge Research Board for the
grant funding the accomplishment of the current
research.
REFERENCES
Andrei, N., 2005. Modern control theory: a historical
perspective. Research Institute for Informatics, Centre
for Advanced Modelling and Optimization, Romania,
http://www.ici.ro/camo/neculai/history.pdf
Burke, H. B., Goodman, P.H., Rosen, D. B., Henson, D.
E., Weinstein, J. N., 2001. Artificial neural networks
improve the accuracy of cancer survival prediction.
Cancer, 91, 857–862.
Cox, D., 1972. Regression models and life tables. J Roy
Stat Soc B, 4, 187–220.
Everitt, B., Rabe-Hesketh, S., 2001. Analyzing Medical
Data Using S-PLUS, Springer, New York.
Grumett, S., Snow, P., Kerr, D., 2003. Neural networks in
the prediction of survival in patients with colorectal
cancer. Clin Colorect Cancer, 2, 239–244.
Kaplan, E., Meier, P., 1958. Nonparametric estimation
from incomplete observations. Journal American
Statistical Association, 53, 457–481.
Mamdani, E. H., Assilian, S., 1973. An experiment in
linguistic synthesis with a fuzzy logic controller. Int. J.
Man-Machine Studies 7, 1–13.
Newland, R. C., Dent, O. F., Lyttle, M. N., Chapuis, P. H.,
Bokey, E. L., 1994. Pathologic Determinants of
survival associated with colorectal cancer with lymph
node metastases. A multivariate analysis of 579
patients. Cancer, 73(8), 2076-2082.
Nguyen, H. T., Prasad, N. R., Walker, C. L., Walker, E.
A., 2002. A First Course in Fuzzy and Neural Control,
Chapman & Hall/CRC.
Rakus-Andersson, E., 2007. Fuzzy and Rough Techniques
in Medical Diagnosis and Medication, Springer,
Berlin Heidelberg.
Rakus-Andersson, E., Zettervall, H., Erman, M., 2010.
Prioritization of weighted strategies in the multi-player
games with fuzzy entries of the payoff matrix. Int. J.
of General Systems, Vol, 39, Issue 3, 291-304.
Sargent, D. J., 2001. Comparison of artificial networks
with other statistical approaches. Cancer, 91, 1636–
1942.
BIOINFORMATICS 2011 - International Conference on Bioinformatics Models, Methods and Algorithms
286
