
REGION-BASED HEURISTICS FOR AN ITERATIVE
PARTITIONING PROBLEM IN MULTIAGENT SYSTEMS
Thomas Kemmerich
International Graduate School Dynamic Intelligent Systems, University of Paderborn, 33095 Paderborn, Germany
Hans Kleine B
¨
uning
Department of Computer Science, University of Paderborn, 33095 Paderborn, Germany
Keywords:
Region-based heuristic, Partitioning, Multi-objective optimization, Multiagent system, Coordination, External
storage media.
Abstract:
Load balancing or access point selection in wireless networks both are problems where a large set of particles
repeatedly has to be partitioned on another set of objects. In general this partitioning problem involves multiple
contrary objectives. Due to the large number of particles a decentralized approach should be favored. In this
work, such an iterative multi-objective optimization problem is modeled as multiagent system. We propose a
local solution technique based on regions and some special coordination media. Agents select target objects
based on the region they are in. Different region types are considered and a local heuristic is developed. We
show the general potential of regions and experimentally analyze different approaches. All approaches are
able to provide high quality solutions.
1 INTRODUCTION
Repeated partitioning of some elements onto another
set of special elements is a frequently occurring prob-
lem in a variety of different real systems. For instance
when multiple users have to be allocated to some
servers. Another example can be found in Wireless
LANs, where mobile devices have to select an access
point (AP) from a set of reachable APs. In the latter
system, recent AP selection protocols still are unable
to solve the problem appropriately in all settings (Yen
et al., 2009). The used protocols basically make a
mobile device to independently select the AP with the
strongest signal to noise ratio. Since bandwidth at an
AP has to be shared among all participants, one can
easily imagine settings where such simple protocols
will result in unbalanced assignments of devices to
access points, esp. if large numbers of devices are in-
volved. Several works deal with this issue in WLANs,
e.g. (Yen et al., 2009), or (Kasbekar et al., 2006).
1
In this work we consider such a repeated or iter-
ative partitioning problem that involves multiple op-
1
Note that the presented approaches may not directly be trans-
fered to real systems as load balancing has to take into account
traffic patterns, too. However, our results could be considered in
the design of novel AP selection mechanisms.
timization criteria. We model it as dynamic multi-
agent system (MAS) where agents change positions
over time and agents as well as mechanisms should
be as simple as possible. Based on local information,
agents have to partition themselves onto a set of target
objects. The created partitionings are supposed to be
optimized against some contrary objectives.
Up to now, even no efficient central approach to
solve this general problem in scenarios with more
than two targets and an arbitrary number of agents is
known (Goebels, 2007). We conjecture that the prob-
lem is at least NP-hard. Hence, efficient heuristics
have to be developed. As we are interested in local
algorithms in that field, we propose to approach the
problem using regions that are defined based on tar-
get positions. Information about these regions will be
used locally by agents to determine a target assign-
ment. At the same time these local decisions should
lead to good partitionings according to global objec-
tives. Besides our focus on local approaches, we are
also interested in building simple algorithms which
only involve very simple knowledge structures and
reasoning processes. The question is how simple both
can become on the one hand while on the other hand
they still should enable agents to find good solutions.
Section 2 briefly deals with related work. Sec-
200
Kemmerich T. and Kleine Büning H..
REGION-BASED HEURISTICS FOR AN ITERATIVE PARTITIONING PROBLEM IN MULTIAGENT SYSTEMS.
DOI: 10.5220/0003151202000205
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 200-205
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

tion 3 then presents a detailed model of the problem.
Next, we proceed stepwise to develop a local heuris-
tic to solve the given problem. We will first define
the considered Target-Regions in Section 4. These re-
gions are defined based on target positions in static
scenarios and build the basis of the heuristics devel-
oped in this paper. An experimental
2
investigation of
an hypothesis on the solution quality of approaches
that use Target-Regions is given. As Target-Regions
represent a good mean to solve the considered prob-
lem but at the same time are hard to calculate, we have
to approximate them for general scenarios. Therefore,
we propose an approximation technique in Section 5
that will be evaluated, too. Based on these insights
we finally develop the local approach. It will use so-
called storage media which can be considered as co-
ordination objects as they are used by agents to ex-
ternally store information about “good” target assign-
ments. The experimental results show that this local
approach is able to find high quality solutions in gen-
eral settings. In the end, we conclude this work in
Section 6.
2 RELATED WORK
The problem underlying the iterative partitioning task
considered in this work is based on the Online Parti-
tioning Problem (Goebels, 2007). In (Ducatelle et al.,
2009), the authors solve a similar problem using a
communication-based and a reactive approach.
The iterative problem considered in this work de-
mands an assignment of agents to targets and thereby
in a sense a formation of groups. In contrast to
clustering or (iterative) graph partitioning (Fj
¨
allstr
¨
om,
1998), where elements are clustered according to
some metrics, an additional constraint applies in our
problem as targets have to be in different groups.
In the area of RoboCup Rescue, task allocation
algorithms are investigated, too. In (Sedaghat et al.,
2006), a simple partitioning technique that divides
a map in regular regions in combination with an
auction-based mechanism is shown to be an effective
mean to solve their task allocation problem.
The local heuristic developed in this work is
based on a framework that incorporates external stor-
age media in the reasoning process of a capacity-
constrained multiagent systems (MAS) (Kemmerich
and Kleine B
¨
uning, 2010a). Knowledge of agents is
stored on passive external storage media (SM) that are
located within the environment. Hence, storage media
2
Source code, evaluation scripts, and configuration files of all
experiments conducted in this work are available for download at
http://www.upb.de/cs/ag-klbue/en/staff/kemmerich/icaart10.tgz
a
4
t
1
target
communication radius of a
2
m
t
2
t
3
storage
medium
sensor/actor
radius of a
read/
write
1
m
m
r
a
2
agent
with job
(remaining
duration 5)
3
m
a
5
a
7
a
9
a
8
1
5
a
1
3
a
3
2
1
1
2
3
2
a
6
1
2
Figure 1: MAS with agents, jobs, targets, and external stor-
age media.
become a mean for the coordination of agents. Stor-
age media are comparable to coordination artifacts as
introduced in (Omicini et al., 2004). These artifacts
are also meant to support coordination in MAS and fi-
nally resulted in the A&A meta-model (Omicini et al.,
2008). In that context, environments as first class ab-
stractions in MAS to support coordination, coopera-
tion, and interaction between agents recently gain an
increasing interest (Parunak and Weyns, 2007).
3 PROBLEM STATEMENT
Figure 1 illustrates the considered MAS which, be-
sides using a grid environment, is basically in a line
with (Kemmerich and Kleine B
¨
uning, 2010a). It con-
sists of a set of agents A = {a
1
,...,a
n
}, a set of tar-
gets T = {t
1
,...,t
m
}, and a set M = {m
1
,...,m
q
} of
external storage media which will be used for coor-
dination purposes later in this work. All entities are
placed in a 2-dimensional Euclidean grid environment
E as defined in Definition 1.
Definition 1 (A,T -Grid-Environment)
An A,T -Grid-Environment E is a rectangular grid
environment containing |A| agents, |T | targets, and a
set of storage media M . Each object is located within
one cell of the grid, i.e. no two objects intersect. Let
c = size(E ) denote the total number of cells in the
grid. Then we call an A,T -Grid-Environment full, if
and only if c = |A| + |T |, and sparse otherwise.
Each agent works on a job located in the environ-
ment. Each job j ∈ J requires ct( j) ∈ [min
t
,max
t
]
time steps and is executed till completion. Job posi-
tions and durations are chosen uniformly at random.
If a job is done, the environment assigns the agent to
a newly created random job. Accordingly, this proce-
dure leads to dynamically changing agent positions
while target and storage media positions are fixed.
Agents interact locally with storage media by reading,
writing, and deleting information items. The model
REGION-BASED HEURISTICS FOR AN ITERATIVE PARTITIONING PROBLEM IN MULTIAGENT SYSTEMS
201

further limits the internal memory capacity of agents
and storage media using a ring buffer. This implies
that information might be overridden. The neighbor-
hood N
a
of agent a consists of up to k agents that are
nearest to a within a given communication radius.
Let p : A → T be a total function that maps el-
ements from A to elements from T . Then a parti-
tioning of two non-empty sets A and T is defined as
a multiset S
A,T
= {S
1
,S
2
,...,S
|T |
} having S
i
= {a ∈
A | p(a) = t
i
}.
The considered problem demands a repeated par-
titioning of agents to targets. The goal is to find good
partitionings in each iteration using only local infor-
mation that optimize three contrary objectives:
1. create a uniform distribution, i.e. assign approx-
imately
|A|
|T |
agents to each target
2. minimize the distance sum between agents and
selected targets
3. minimize the costs that are produced according to
a cost model
To measure the quality of a partitioning estab-
lished in iteration , we use a function f : S
A,T
→
[0,1] that is calculated from a global perspective. In
this work, Equation 1 realizes this function and cal-
culates the weighted sum of the first two normalized
objective values. Weights α and β in general must be
greater or equal to zero and sum to one. If not stated
otherwise, we will use α = β =
1
2
. Note that crite-
ria three (costs) is not considered in this formula as it
does not directly influence the pure partitioning qual-
ity. For a discussion on how costs could be modeled
and for a brief cost analysis, we refer to the extended
version of this paper (Kemmerich and Kleine B
¨
uning,
2010b).
f (S
A,T
) = α ·
∏
S
i
∈S
A,T
|S
i
|
|A|
|T |
|T |
+β ·
∑
a∈A
δ(a,τ(a))
∑
a∈A
δ(a, p(a))
(1)
The first term of Equation 1 represents the distribu-
tion objective value derived from a partitioning S
A,T
.
It is normalized against an optimal uniform distribu-
tion. The second term normalizes the distance sum
of S
A,T
against the minimal possible distance sum.
Here, τ : A → T is used which returns the nearest
target of an agent (ties are broken by selecting the tar-
get t
i
with the lowest index i). The Euclidean dis-
tance between an agent and a target is calculated by
δ : A × T → R
+
. It is particularly noticeable that
agents cannot calculate partitioning qualities on their
own due to partial observability of the environment.
The overall goal of the agents then is to maximize
the average partitioning quality over some iterations k
as expressed by
q =
1
k
k
∑
=1
f (S
A,T
). (2)
4 TARGET-REGIONS
We now propose the basic mechanism upon which the
final local heuristic will be based on. Therefore, we
first define the term Target-Regions:
Definition 2 (Target-Region)
A Target-Region TR(t) for any target t in a full A-T -
Grid-Environment is defined by a set of cells C
t
. The
set consists of target t’s cell and all cells of agents
that, in an optimal solution, are assigned to t.
Based on this definition, the basic idea is very simple:
given Target-Regions and a full environment, agents
create partitionings by just selecting the target of the
region they are located in. The corresponding algo-
rithm then reads as follows:
Algorithm 1: Executed by each agent a ∈ A.
1: Determine current agent position pos(a)
2: Determine Target-Region TR(t) at pos(a)
3: Assign agent a to target t
Obviously, the decision making itself cannot be
simpler besides having an build-in oracle that makes
the agents know the best target to select at any time.
Also the knowledge structure is very simple as it is
only composed of one position and one target infor-
mation item. Hence this idea fits well to our intentions
of building simple algorithms.
In addition, this simple approach will — by def-
inition of Target-Regions and since target positions
are fixed — result in optimal solutions in full envi-
ronments. The reasons therefore are that i) agent po-
sitions in full environments can also be considered to
be fixed and ii) that agents are anonymous in the qual-
ity function defined in Equation 1. Accordingly, such
a full scenario reduces to a static one, which means
that TR provide optimal partitionings in each iteration
and thus also result in an optimal average partitioning
quality.
Although these regions were calculated for a full
and thus static scenario, we also propose to solve the
general iterative partitioning problem, which usually
involves less agents, with the help of these static re-
gions. Since we then work in so-called sparse envi-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
202

ronments, Target-Regions by definition may not pro-
vide optimal solutions in all iterations.
At this point, two questions arise: the first ques-
tion concerns the potential of static Target-Regions as
a mean to solve the iterative problem in sparse envi-
ronments. The second question is about the complex-
ity of determining Target-Regions in static scenarios.
We investigate question one using Hypothesis 1.
Hypothesis 1. Let agents in an A-T -Grid-Environ-
ment repeatedly create partitionings based on Target-
Regions. Then the resulting average partitioning qual-
ity according to Equation 2 is expected to be
1. high if agents are distributed uniformly, and
2. low if agents are distributed according to a normal
distribution.
The solution quality further depends on the ratios be-
tween the number of agents, targets, and the size of
the environment.
Note that if agents are normally distributed then they
are concentrated within a certain part of the environ-
ment. This may lead to situations where no or only
a small number of agents is located in some Target-
Regions. Accordingly, bad distribution values and
thus bad overall partitioning qualities result. Hence,
in the remainder of this work we concentrate on uni-
formly distributed agents. In addition, the results
of an empirical analysis fully support Hypothesis 1.
The corresponding experiments compare optimal so-
lutions for settings with two targets to those obtained
using Algorithm 1 and static Target-Regions in sparse
environments.
3
Details can be found in the extended
paper (Kemmerich and Kleine B
¨
uning, 2010b).
The second question concerning the complexity
of calculating Target-Regions is not yet answered.
As by definition, Target-Regions are based on opti-
mal solutions, their construction requires to optimally
solve the partitioning problem. However, as already
mentioned we conjecture that solving such static sce-
narios with more than two targets is at least NP-
hard, since no efficient algorithm is known (Goebels,
2007). Thus, the problem of determining Target-
Regions is conjectured to be at least NP-hard, too.
3
We considered settings with two targets, because no
polynomial-time algorithm that provably returns an optimal so-
lution for settings with an arbitrary number of targets is known
(Goebels, 2007). Accordingly, validating Hypothesis 1 for general
settings is computationally intractable. However, we are aware of
a central-instance polynomial-time algorithm for settings with two
targets which we used in the evaluation.
5 APPROXIMATION OF
TARGET-REGIONS
As the experiments conducted for validating Hypoth-
esis 1 resulted in high quality solutions for uniformly
distributed agents and because the construction of
Target-Regions is assumed to be at least NP-hard, we
propose to use approximated Target-Regions. The
presented approximation is based on a local algorithm
that is known as Exchange Target Strategy (ETS)
(Goebels, 2007). Hence, we call the approximated
regions ETS-Target-Regions.
5.1 ETS-Target-Regions
According to (Goebels, 2007), the Exchange Target
Strategy (ETS) is a good mean to find high qual-
ity partitionings of agents to targets in settings with
static positions. The basic idea of the ETS is as fol-
lows. Initially, agents are (randomly) assigned to tar-
gets. Then, agents repeatedly communicate assign-
ment and distance information. They exchange target
assignments with neighboring agents if this locally
improves the distance objective. Thus, the distribu-
tion objective is fixed based on the initial assignment
while the distance objective gradually improves until
it converges. More details on ETS can be found in the
extended version of the paper or in (Goebels, 2007).
Although ETS provides high quality solutions on
average, worst cases leading to poor solutions or lo-
cal optima can be constructed (Goebels, 2007). In
addition, the costs produced by repeated information
exchange may become relatively high.
To approximate Target-Regions, we propose to
use the Exchange Target Strategy (ETS). We define
the resulting regions in Definition 3.
Definition 3 (ETS-Target-Region)
An ETS-Target-Region ETS-TR(t) for any target t in
a full A-T -Grid-Environment is defined by a set of
cells that consists of target t’s cell and all cells whose
agents are assigned to t after the Exchange Target
Strategy has converged.
Note that ETS-Target-Regions (ETS-TR) in this work
are those that have evolved after 2000 iterations of the
ETS approach, as hand-made experiments indicated
that this value was by far sufficient for convergence
in all considered scenarios. Convergence in this con-
text means that no further improvement of the overall
solution quality was observed after 2000 iterations.
We developed an approach that first calculates
ETS-Target-Regions for a full environment. The re-
sulting ETS-TR then are mapped to the cells of the
REGION-BASED HEURISTICS FOR AN ITERATIVE PARTITIONING PROBLEM IN MULTIAGENT SYSTEMS
203
grid environment, i.e. each cell obtains an informa-
tion about the region it belongs to. In a second phase,
this initialized environment then can be used with the
desired number of agents. Each agent simply selects
the target that is identified by the information stored
at the agent’s current position.
Again, we simulated this approach and compared
the results to optimal solutions for settings with two
targets. We calculated an average error, which we de-
fined as the average difference between the optimal
solution value and the solution value obtained using
the ETS-Target-Regions over all iterations. We found
that ETS-TR with an appropriate ratio between the
number of agents and the environment size is roughly
1% or less in seven out of nine simulated scenar-
ios. Accordingly, we can conclude that ETS-TR are a
good mean to approach the iterative partitioning prob-
lem, too. A more detailed description and the experi-
mental evaluation can be found in the extended paper
(Kemmerich and Kleine B
¨
uning, 2010b).
5.2 Sparse-ETS-Target-Region
Algorithm
As indicated in Section 5.1, ETS-TR are a promising
mean to solve our iterative partitioning task. How-
ever, it is impractical to consider a full A-T -Grid-
Environment or to apply an approach that calculates
ETS-Target-Regions to initialize the cells. In this sec-
tion we thus introduce a local algorithm for sparse
environments that approximates ETS-Target-Regions.
Therefore, we use so-called storage media for coordi-
nation (Kemmerich and Kleine B
¨
uning, 2010a). Stor-
age media (SM) are located at fixed positions in the
environment and can be used by agents to store infor-
mation externally.
The Sparse ETS-Target-Region (S-ETS-TR) ap-
proach can basically be divided into two phases. In
the first phase, each agent locally executes the ETS
algorithm for a fixed number of iterations i
max
. Af-
ter each ETS iteration, every agent a stores its current
target assignment combined with its current position
pos(a) on a storage media in its vicinity. Therefore,
it must be guaranteed that each agent can always in-
teract with a storage media. Then, the combination
of all information stored on all storage media from
a global perspective represents approximated ETS-
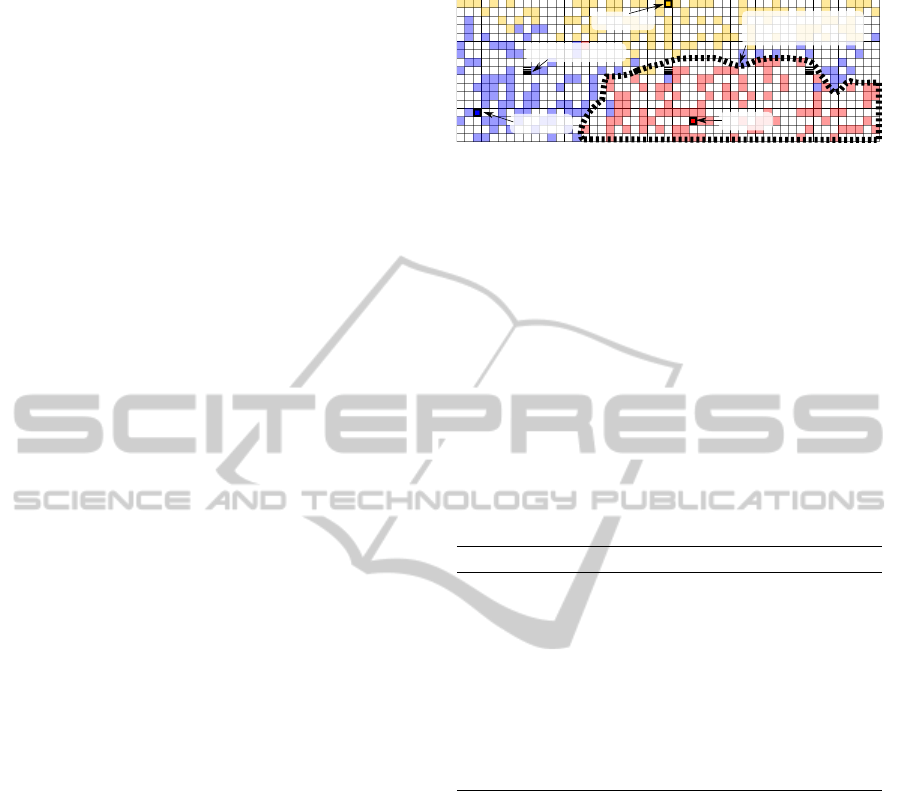
Target-Regions, as sketched in Figure 2.
In the second phase agents stop to execute the ETS
algorithm. Instead, they retrieve a target assignment
from the nearest SM based on the information stored
at the media. These information approximate ETS-
Target-Regions. Depending on the parameters, there
will be positions without target assignment informa-
Target 1
Target 2
Target 3
Storage medium
approximated
ETS-Target-Region
Figure 2: Exemplary target assignment information (col-
ored boxes) stored on the storage media after some S-ETS-
TR iterations.
tion (white boxes in Figure 2). If this happens, a given
position must be classified according to locally avail-
able information. Therefore, a SM executes a simple
classification algorithm that uses a counting argument
based on eight surrounding positions. The resulting
classification basically corresponds to the most often
selected target in the surrounding. It is returned and
stored on the storage media for later use.
Algorithm 2 summarizes the S-ETS-TR approach.
Details on the data structures and on the classification
algorithm as well as on the experimental results are
given in the extended paper.
Algorithm 2: Executed by each agent a ∈ A.
1: procedure SPARSE-ETS-TARGET-REGIONS
2: m ← nearest SM
3: if current iteration < i
max
then Phase 1
4: t ← target assignment of an ETS iteration
5: m.STORE-INFO(t, pos(a))
6: else Phase 2
7: t ← m.CLASSIFY-POSITION(pos(a))
8: if t is set then assign agent to t
9: else keep last target assignment
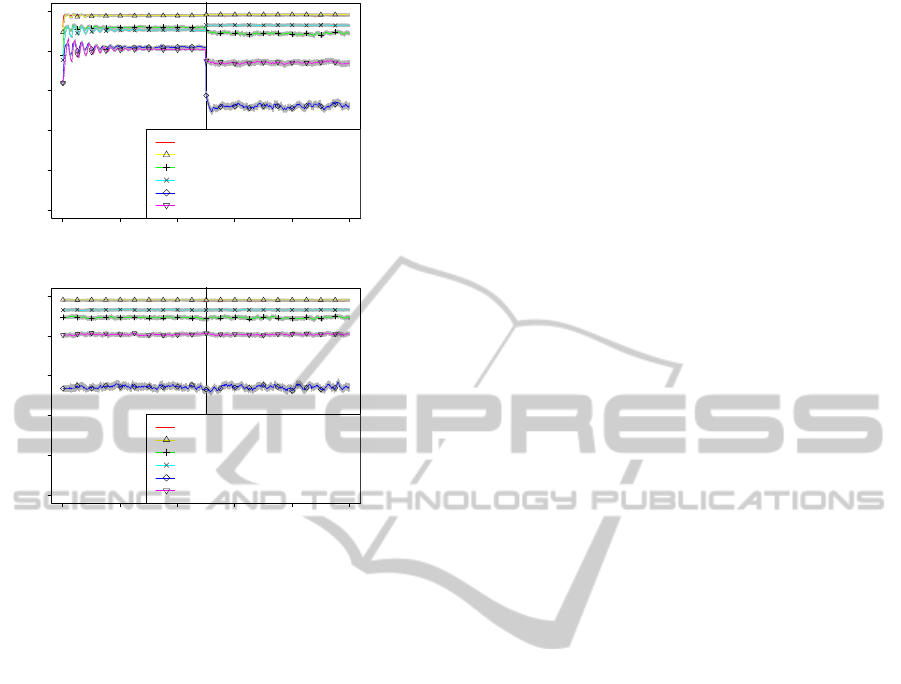
Figure 3 briefly summarize the latter results. It
illustrates the process of both ETS-based approaches
and shows 95% confidence intervals. The vertical line
at iteration 500 marks the beginning of the second
phase. It is particularly noticeable that phase one of
S-ETS-TR may produce higher solution values as op-
timization is performed in each iteration by executing
the ETS algorithm. Performance decreases in the sec-
ond phase depending on the settings, esp. in settings
with a higher target to agent ratio. However, with a
lower ratio, the results in the second phase become
even better (e.g. for 5 targets and 500 agents).
Comparing the average partitioning quality q, we
observe that the local S-ETS-TR heuristic is able to
produce high quality solutions that are on a level with
the real ETS-TR approach from Section 5.1. This is
particularly interesting as the very simple classifica-
tion technique misclassifies between 5% and 23% of
the cells compared to real ETS-Target-Regions.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
204
0 200 400 600 800 1000
0.0 0.2 0.4 0.6 0.8 1.0
Iteration
solution quality
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
2 targets, 100 agents (q=0.97646)
2 targets, 500 agents (q=0.98113)
5 targets, 100 agents (q=0.88665)
5 targets, 500 agents (q=0.92793)
16 targets, 100 agents (q=0.52215)
16 targets, 500 agents (q=0.73970)
●
(a) S-ETS-TR
0 200 400 600 800 1000
0.0 0.2 0.4 0.6 0.8 1.0
Iteration
solution quality
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
2 targets, 100 agents (q=0.97611)
2 targets, 500 agents (q=0.98028)
5 targets, 100 agents (q=0.89079)
5 targets, 500 agents (q=0.93000)
16 targets, 100 agents (q=0.54179)
16 targets, 500 agents (q=0.80675)
●
(b) ETS-TR
Figure 3: Solution qualities with 95% confidence intervals.
The results of the ETS-TR approach in Figure
3(b) also illustrate the potential of ETS-based Target-
Region approximations in settings with many targets.
However, they are also affected by a dependency on
the ratio between the number of agents and targets as
already stated for Target-Regions in Hypothesis 1.
6 CONCLUSIONS
We constructed a local region-based heuristic to solve
an iterative partition task in a multiagent system. The
potential of the general idea and different region types
were investigated experimentally. Our simulation re-
sults, although more simulations in different settings
should be performed in the future, attribute high po-
tential to region based heuristics. To improve solu-
tion qualities of the local approach, other classifica-
tion techniques should be investigated to reach the
potential that approximated regions can provide. Re-
turning to our intension of building systems that are
able to solve the iterative partitioning problem with
very basic and simple information structures and rea-
soning processes, region-based approaches provide a
promising mean and should be investigated further.
The extended version of this work (Kemmerich
and Kleine B
¨
uning, 2010b) provides additional details
on the approaches and their evaluation and proves
some properties of optimal solutions and Target-
Regions. We also present a formula to estimate so-
lution qualities of the ETS-TR approach and discuss
some cost issues concerning the local heuristic.
REFERENCES
Ducatelle, F., F
¨
orster, A., Di Caro, G., and Gambardella,
L. (2009). New task allocation methods for robotic
swarms. In 9th IEEE/RAS Conference on Autonomous
Robot Systems and Competitions.
Fj
¨
allstr
¨
om, P.-O. (1998). Algorithms for graph partitioning:
A survey. Linkping Electronic Articles in Computer
and Information Science, 3(10).
Goebels, A. (2007). Agent Coordination Mechanisms for
Solving a Partitioning Task. Logos.
Kasbekar, G., Kuri, J., and Nuggehalli, P. (2006). Online
association policies in IEEE 802.11 WLANs. In 4th
International Symposium on Modeling and Optimiza-
tion in Mobile, Ad-Hoc and Wireless Networks (WiOpt
2006), pages 11–20. IEEE.
Kemmerich, T. and Kleine B
¨
uning, H. (2010a). External co-
ordination media in capacity-constrained multiagent
systems. In Proc. IEEE/WIC/ACM Intl. Joint Conf.
on Web Intelligence and Intelligent Agent Technology
(WI-IAT’10), pages 109–116. IEEE Computer Soci-
ety.
Kemmerich, T. and Kleine B
¨
uning, H. (2010b). Region-
based heuristics for an iterative partitioning problem
in multiagent systems (extended version). Technical
Report TR–RI–10–320, University of Paderborn.
Omicini, A., Ricci, A., and Viroli, M. (2008). Arti-
facts in the A&A meta-model for multi-agent sys-
tems. Autonomous Agents and Multi-Agent Systems,
17(3):432–456.
Omicini, A., Ricci, A., Viroli, M., Castelfranchi, C.,
and Tummolini, L. (2004). Coordination arti-
facts: Environment-based coordination for intelli-
gent agents. In Third International Joint Conference
on Autonomous Agents and Multiagent Systems (AA-
MAS’04), pages 286–293. IEEE Computer Society.
Parunak, H. V. D. and Weyns, D. (2007). Guest editors’
introduction, special issue on environments for multi-
agent systems. Autonomous Agents and Multi-Agent
Systems, 14(1):1–4.
Sedaghat, M. N., Nejad, L. P., Iravanian, S., and Rafiee, E.
(2006). Task allocation for the police force agents in
robocuprescue simulation. In RoboCup, volume 4020
of LNCS, pages 656–664. Springer.
Yen, L.-H., Yeh, T.-T., and Chi, K.-H. (2009). Load balanc-
ing in IEEE 802.11 networks. Internet Computing,
13(1):56–64.
REGION-BASED HEURISTICS FOR AN ITERATIVE PARTITIONING PROBLEM IN MULTIAGENT SYSTEMS
205
