
USING DISTRIBUTED CSPs TO MODEL BUSINESS PROCESSES
AGREEMENT IN SOFTWARE MULTIPROCESS
Luisa Parody, Mar´ıa Teresa G´omez-L´opez, Rafael M. Gasca and Diana Borrego
Department of Computer Languages and Systems, University of Seville, Seville, Spain
Keywords:
Business process management, Distributed constraint satisfaction problem, Web services.
Abstract:
A business process consists of a set of activities which are performed in a coordination way to obtain an
objective. Sometimes the definition of this objective using only a classic business processes management is
not possible. When the choreography of the processes cannot be defined with a combination of tasks using
sequences, conditions, ’xor’, ’or’ and ’split’ control flow patterns, another representation and solution are
necessary to be used. This problem makes difficult the decision making in software management projects.
In this paper a way to describe a process agreement is described where the execution and the number of
tasks execution order of the Web Services cannot be defined. As a case study, the resource distribution in
a multiproject development environment is used. In this case, the processes have to achieve an agreement
in function of the business rules that relate the processes. In order to achieve this objective, the Distributed
Constraint Satisfaction Problems are used to model and solve this type of problems.
1 INTRODUCTION
Business Process Management (BPM) has received
considerable attention since it permits to combine di-
fferent tasks to obtain a common objective. A busi-
ness process consists of a set of activities that are per-
formed in coordination in an organizational and tech-
nical environment (Weske, 2007). BPM includes con-
cepts, methods, and techniques to support the design,
administration, configuration, enactment, and analy-
sis of business processes. The bases of BPM are
the explicit representation of business processes with
their activities and the execution constraints between
them. However, the aspect analyzed in this paper is
when the execution order and the constraint relation
between the processes cannot be described with a tra-
ditional business process model in an statical way.
The execution order of the activities will be defined
in function of the data flow for the different instances.
For example if the outputs of a business process A af-
fect to another process B, and the output of process
B affects to business A and there is no order between
them. In this case, the processes have to achieve an
agreement in function of business rules that relate the
processes.They have to share a resource to obtain the
maximum benefit.
The combination of processes may cause the use
of services with private and public information, in
such a way that the decisions cannot be made in an ex-
ternal or centralized way to the processes. That is, the
information is distributed in different nodes although
all of them have to work together. This type of Busi-
ness Process behavior has some aspects in common
with DisCSPs hence we think that some of the advan-
tages of DisCSPs can be adapted to solve the Business
Process Agreement.
A company specialized in Custom Software De-
velopment Products tends to work in a multiproject
environment. The complexity inherent in a software
development management increases in the presence
of several concurrent projects which are performed
by the same organization that must allocate resources
between them. (Navascu´es Fern´andez-Victorio and
Ramos Rom´an, 2008) presents a basic scheme of
business process to this type of companies. The orga-
nization plans the production of a project by means of
the assignment of resources based on its capacity, the
agreements acquired with clients and the global work-
load. In other words, based on the business agree-
ments for each project. In addition, the company has
an internal control system to manage the execution
and change the assignment to deal with internal or ex-
ternal unexpected events in the projects. It is difficult
to determine when the process will end since all its
features cannot be known ”a priori”.
Moreover, the company has to establish the dead-
434
Parody L., Teresa Gómez-López M., M. Gasca R. and Borrego D..
USING DISTRIBUTED CSPs TO MODEL BUSINESS PROCESSES AGREEMENT IN SOFTWARE MULTIPROCESS.
DOI: 10.5220/0003180904340438
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 434-438
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

lines of the projects with each client since the pla-
nning is very important to the success or failure of the
project. The resources management is crucial since
the concurrent projects compete for the resources
existing within the company. To reach a solution, they
have to achieve an agreement ensuring their interests
and giving in some cases. Each project has its own
contract with client established by the business rules,
where time delay and final cost of the project are re-
lated.
The structure of the paper is as follows: Sec-
tion 2 includes some relevant proposals. Section 3
presents some basic concepts related to DisCSP and
its Asynchronous Backtracking Algorithm. Section
4 describes how the algorithms for DisCSPs can be
adapted to our problem. Section 5 shows an example
of combination of Web Services and describes how
our proposal is applied to the example. Section 6
depicts the experimental results. Finally conclusions
and future work are presented.
2 RELATED WORKS
The graphical Standard for modeling business pro-
cesses is Business Process Modeling Notation
(BPMN) proposed by OMG. However, BPMN stan-
dard is not powerful enough since, among other is-
sues, there is an important need of many adaptive pro-
cesses for concurrentactivities to respect coordination
constraints. These require that concurrent activities
coordinate their behaviors in response to exogenous
events. In order to represent the choreography of the
processes in a business process, several graphical lan-
guages have been developed. The most important is
the standard BMPN (Weske, 2007), that can be used
for large number of problems (Wolter and Schaad,
2007).
3 DISTRIBUTED CONSTRAINT
SATISFACTION PROBLEM
In (Yokoo and Hirayama, 2000), Makoto et al. pre-
sented a Distributed Constraint Satisfaction Problem
(DisCSP) as a general formalism for dealing with
problems in multi-agent systems. A DisCSP is a
CSP where the set of variables and constraints of
the problem are distributed between a set of agents.
These agents are in charge to solve their own sub-
problem and must coordinate themselves with the rest
of agents to reach a solution to the global problem
(Abril L´opez et al., 2007).
In order to improve the time to find the best so-
lution, the paper of Redouane Ezzahir et al. (Ezza-
hir et al., 2008) proposes algorithms for solving Dis-
tributed Constraint Optimization Problems (DCOP).
3.1 Backtracking Algorithms to Solve
DisCSPs
There are different proposals to model and solve
DisCSP:
Centralized Backtracking selects a leader agent
among all agents who gather all the information about
variables, their domains, and their constraints (Yokoo
and Hirayama, 2000). If the knowledge about the pro-
blem can be gathered into a single agent, this agent
can solve the problem alone by means of the use of
normal centralized constraint satisfaction algorithms.
Asynchronous algorithms are characterized by the
fact that all agents are active in parallel and only coor-
dinate as needed to ensure consistency if their varia-
bles are involved in the constraints.
In Asynchronous Backtracking (ABT), the prio-
rity order of variables/agents is determined, and each
agent communicates its tentative value assignment
to its neighboring agent via ’ok?’ messages. Each
agent maintains the current value assignment of other
agents from its viewpoint. An agent changes its
assignment if its current value assignment is not con-
sistent with the assignment of higher priority agents.
If there exists no value that is consistent with the
higher priority agents, the agent generates a newcons-
traint (called a nogood), and communicates the no-
good to a higher priority agent, thus the higher prio-
rity agent changes its value making backtracking.
In (Yokoo and Hirayama, 2000) the soundness,
completeness and termination of ABT algorithm is
proved.
3.1.1 Heuristics for Variable Ordering
There are different forms to order the variables to es-
tablish the priority: (a) The highest priority is assig-
ned to the variable that participates in more cons-
traints, called variable degree. There are different
possibilities to establish the next highest priority va-
riable: (a.1) The next variable that participates in
more constraints, without considering the agent who
it belongs to. (a.2) The next variable that participates
in more constraints and belongs to the same agent that
the first one. (b) The highest priority is assigned to
the variables that belong to the fastest agent. (c) The
priority is assigned according to the problem specifi-
cation.
USING DISTRIBUTED CSPs TO MODEL BUSINESS PROCESSES AGREEMENT IN SOFTWARE MULTIPROCESS
435
4 USING DISCSP TO MODEL
BUSINESS PROCESS
AGREEMENTS
Business Process Execution Language for Web Ser-
vices (WS-BPEL) is emerging as the prominent lan-
guage for Modeling Executable Business Processes.
This is due to WS-BPEL provides an appropriate
set of constructs to design a process in an intuitive
way. One of its features is the ability to synchro-
nize concurrent flows within a process by specifying
control links between activities. There could be ad-
ditional types of constraints between concurrent ac-
tivities. The constraint that involves the variables of
the different agents, implying their equality, requires
actions in response to events in order to be coordi-
nated. Such types of constraints between concurrent
activities are called coordination constraints (Wu and
Doshi, 2008). These constraints must adapt to events
to preserve their optimality. Unfortunately, coordi-
nation constraints are not natively supported by WS-
BPEL, its support for designing flexible processes is
limited.
On the other hand, the aim of these types of pro-
blems is to obtain a common objective, which de-
pends on the business agreements of each agent, the
client and on the contract established through busi-
ness rules.
The activitiesthat need this type of coordinationto
obtain the overall goal have some aspects in common
with the features of DisCSPs discussed in Section
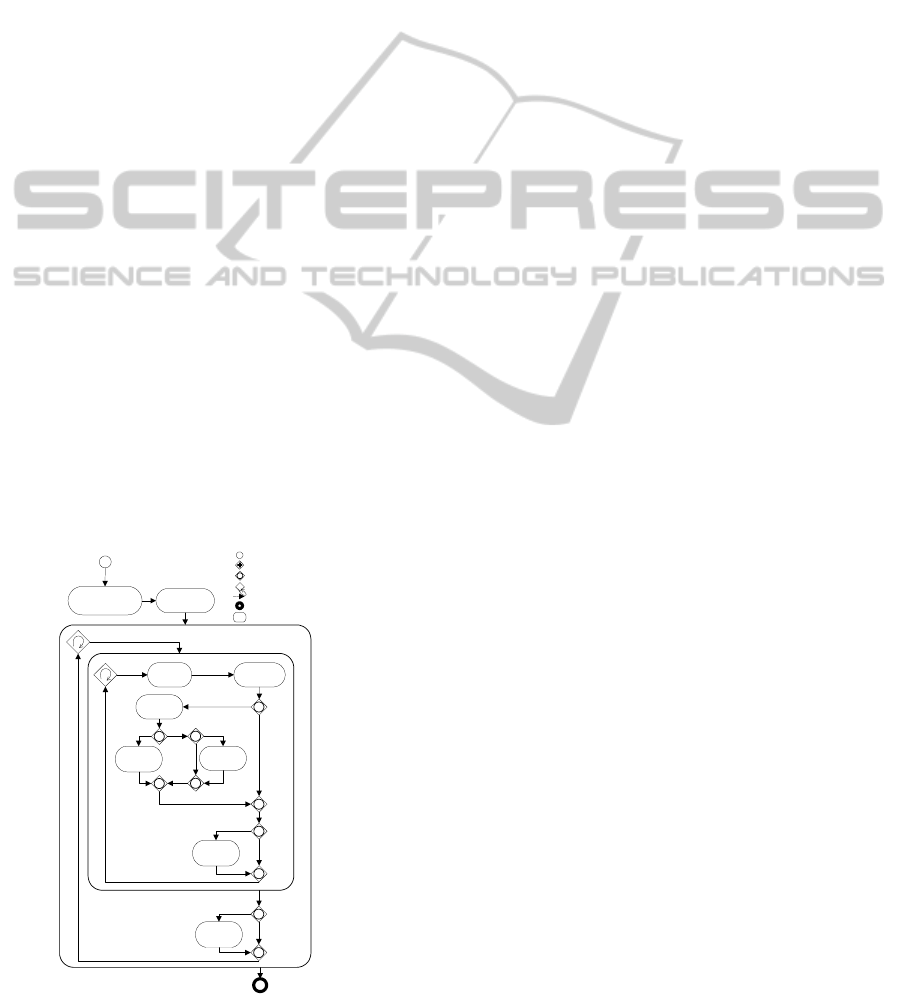
Establish the
order of variables
Initialize
Variables
Update
STAGE
Calculate
OBJECTIVE
Update
SOL
Update
SOL_OP
Check end
iteration
Yes
Yes
No
No
Do
Backtrack
No
Yes
Check end
iteration
No
Yes
Legend:
Parallel - And
Exclusive - Xor
Sequence Flow
Start Event
End Event
Activity
Sequence Flow Looping
Figure 1: Backtrack Business Process.
3. In this paper, our proposal adapts DisCSPs to the
agreement problems between tasks to obtain the ob-
jective. As the algorithm based on the algorithms pre-
sented in Section 3.1, we have designed a new algo-
rithm to make Business Processes. It can be classified
as a mixture of Centralized and Asynchronous Back-
tracking. It is centralized since the Business Process
has the knowledge about the values of the variables,
and it is asynchronous since all the agents are active
in parallel and communicate their consistencies or in-
consistencies asynchronously.Thekey is that the algo-
rithm invokes to an activity that calculates the objec-
tive. Then, we translate this algorithm into a Business
Process (Figure 1).
The most important activity in the BP (Figure 1) is
Calculate OBJECTIVE activity, where each problem
models its way to obtain the overall goal.
5 MOTIVATING EXAMPLE
As an example to illustrate our proposal, a Web Ser-
vice to perform the assignment of people to tasks pre-
sented in the introduction (Section 1) is used. During
the development of a software product, different tasks
or activities take place, giving rise to the software life-
cycle.
Typically, a lifecycle model addresses the phases
of a software project: requirements, design, imple-
mentation, integration, testing, operations and main-
tenance. In our example, the company has to deal
with the performing of the implementation phase of
some different projects concurrently. The staff is
made up of different number of workers on each di-
fferent professional category, who must be assigned
properly to perform the tasks of these projects. The
profits obtained by the company depends on the delay
of project. The fulfillment of the delivery time agreed
with the customer provides the maximum profits for
each project. An optimal staff distribution will do the
sum of profits as maximum as possible. The calcula-
tion of the profits of each project is internally made
within each project separately, so that it is necessary
to get an agreement to achieve the overall goal. For
example, we have three projects. If two workers are
assigned to project 1, it implies that the profit will be
1 million euros and for project 2, the profit will be
0.4 million. But, if these two workers are assigned
to project 2, the profits will be 0.8 and 0.7 million
for project 1 and 2 respectively, so this is the best
assignment to obtain the maximum global profit.
The profits that the company obtains by each
project depend on the business agreement between
each project manager, the project’s client, and by the
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
436

contract established through business rules. The cal-
culation of the profits of each project is performed in a
different Web Service. The combination of those cal-
culations will provide the overall profit to maximize.
5.1 Backtracking Algorithm applied to
the Motivating Example
In the particular case of the Software Management
Project, there are three different projects that work
concurrently and need some kind of staff organiza-
tion. Although these projects belong to the same com-
pany, they do not have to reach the same agreements
with clients or the internal contracts. For security and
privacy reasons, they share only the necessary infor-
mation to achieve the overall goal. Each project will
correspond to an agent. These agents have to agree to
maximize the profit of the company, trying to finish
their projects on time with the available staff.
In this section, the proposal presented in Section
4 is applied to the problem of Software Management
Projects.
Considering the cases studied in Section 3.1.1 and
the presented problem, all the variables are involved
in the same number of constraints and there are no
significant differencesin the speed of response time of
the different agents. In this case, to establish the prio-
rity order it is necessary to take into account the over-
all goal of the problem: to maximize the overallprofit.
The variables which belong to the project which gives
the greatest profit will have the highest priority. With
this criterion, the algorithm may find a good solution
quickly and make more efficient bounds.
The most important activity in the BP (Figure 1)
was the Calculate OBJECTIVE activity, in the mo-
tivating problem this activity is Calculate PROFIT.
In this activity there are such parallel flows belong-
ing to each agent. Each flow has two activities: (a)
Solve variables of the agents: it uses the constraints
that the agent has associated to assign consistent val-
ues to variables. (b) Establish the profit: it calls the
Web Service which calculates the profit with the val-
ues assigned to variables in the previous activity.
6 EXPERIMENTAL RESULTS
Table 1 shows the staff distribution given the follow-
ing input: 5, 10 and 6 members of staff with cate-
gories 1, 2 and 3 respectively. The profit obtained
with this distribution is 840500 euros.
Table 1: Results.
Variables P1 P2 P3
num. of T1 4 0 1
num. of T2 8 1 1
num. of T3 1 5 -
7 CONCLUSIONS AND FUTURE
WORK
In this work, a Business Process that adapt the Back-
tracking Algorithm for DisCSP to Business Process is
presented. This proposal arises from the need to coor-
dinate different activities that belong to a Business
Process and work concurrently sharing resources.
Thanks to this adaptation, the activities achieve the
coordination to obtain an overall goal, which, in the
example presented in this paper, is the software multi-
project profit.
One of the main problems in the search of solu-
tions is the size of the search space. A bound could
be established to avoid calling agents and calculate
the profit if we know that we are not going to get a
better result. We could obtain the bound from: (i) the
search space that is already done and (ii) the ”post-
morten” memory (Navascu´es Fern´andez-Victorio and
Ramos Rom´an, 2008) of previous projects.
ACKNOWLEDGEMENTS
This work has been partially funded by the Junta
de Andaluc´ıa by means of la Consejer´ıa de Inno-
vaci´on, Ciencia y Empresa (P08-TIC-04095) and by
the Ministry of Science and Technology of Spain
(TIN2009- 13714) and the European Regional Deve-
lopment Fund (ERDF/FEDER).
REFERENCES
Abril L´opez, M., Barber Sanchs, F., and Salido Gregorio,
M. A. (2007). Particionamiento y Resoluci´on Dis-
tribuida Multivariable de Problemas de Satisfacci´on
de Restricciones. PhD thesis, Universidad Politcnica
de Valencia, Valencia.
Ezzahir, R., Bessiere, C., Benelallam, I., Bouyakhf, H., and
Bela¨ıssaoui, M. (2008). Dynamic backtracking for
distributed constraint optimization. In ECAI, pages
901–902.
Navascu´es Fern´andez-Victorio, J. and Ramos Rom´an, I.
(2008). Un modelo para la simulaci´on h´ıbrida de la
producci´on de software a medida en un entorno mul-
tiproyecto. PhD thesis, Universidad de Sevilla.
USING DISTRIBUTED CSPs TO MODEL BUSINESS PROCESSES AGREEMENT IN SOFTWARE MULTIPROCESS
437

Weske, M. (2007). Business Process Management: Con-
cepts, Languages, Architectures. Springer.
Wolter, C. and Schaad, A. (2007). Modeling of task-based
authorization constraints in bpmn. In BPM, pages 64–
79.
Wu, Y. and Doshi, P. (2008). Making bpel flexible - adapt-
ing in the context of coordination constraints using
ws-bpel. pages 423–430.
Yokoo, M. and Hirayama, K. (2000). Algorithms for dis-
tributed constraint satisfaction: A review. In AAAI,
volume 3, pages 198–212.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
438
