
FORMALIZING DIALECTICAL REASONING FOR
COMPROMISE-BASED JUSTIFICATION
Hiroyuki Kido, Katsumi Nitta
Interdisciplinary Graduate School of Science and Engineering, Tokyo Institute of Technology, Tokyo, Japan
Masahito Kurihara
Graduate School of Information and Science, Hokkaido University, Sapporo, Japan
Daisuke Katagami
Faculty of Engineering, Tokyo Polytechnic University, Tokyo, Japan
Keywords: Argument-based reasoning, Compromise, Dialectical thought, Deliberation.
Abstract: Chinese traditional philosophy regards dialectics as a style of reasoning that focuses on contradictions and
how to resolve them, transcend them or find the truth in both. Compromise is considered to be one possible
way to resolve conflicts dialectically. In this paper, we formalize dialectical reasoning as a way for deriving
compromise. Both the definition of the notion of compromise and the algorithm for dialectical reasoning
are proposed on an abstract complete lattice. We prove that the dialectical reasoning is sound and complete
with respect to the compromise. We propose the concrete algorithm for dialectical reasoning characterized
by definite clausal language and generalized subsumption. The algorithm is proved to be sound with respect
to the compromise. Furthermore, we expand an argumentation system to handle compromise arguments, and
illustrate that an agent bringing up a compromise argument realizes a compromise based justification towards
argument-based deliberation.
1 INTRODUCTION
Argumentation in artificial intelligence, often called
computational dialectics, is rooted in Aristotle’s idea
of evaluating argumentation in a dialogue model
(Hamblin, 1970). In contrast, there exist various def-
initions of dialectics in history (Rescher, 2007) and
it leads to various interpretations in various areas to-
day. For instance, psychologist Nisbett interprets di-
alectics as a style of reasoning intended to find a
middle way (Nisbett, 2003), some logicians as for-
mal logic disrespecting the law of noncontradiction
(Carnielli et al., 2007), and some computer scientists
as the study of systems mediating discussions and ar-
guments between agents, artificial and human (Gor-
don, 1995). In particular, Nisbett pointed out that
there is a style of reasoning in Eastern thought, trace-
able to the ancient Chinese, which has been called
dialectical, meaning that it focuses on contradictions
and how to resolve them or transcend them or find the
truth in both. His experiments showed that, compared
with Westerners, Easterners have a greater preference
for compromise solutions and for holistic arguments,
and they are more willing to endorse both of two ap-
parently contradictory arguments. Moreover, he con-
trasted a logical approach and a dialectical approach
for conflicting propositions, and pointed out that the
former one would seem to require rejecting one of the
propositions in favor of the other in order to avoid
possible contradiction, and the latter one would favor
finding some truth in both, in a search for the Middle
Way. We think that the perspective opens up a new
horizon for argumentationinartificial intelligence, es-
pecially in argument-based deliberation and negotia-
tion, because argumentation is a prominent way for
conflict detection, social decision making and con-
sensus building, and the latter two cannot be achieved
without such kinds of thought. However, there is lit-
tle work on computational argumentation directed to
dialectical conflict resolution we mentioned above.
In this paper, we formalize dialectical reasoning
as a way for deriving a compromise. This is based on
the knowledge that a compromise is a possible way
for realizing dialectical conflict resolution, and our
355
Kido H., Nitta K., Kurihara M. and Katagami D..
FORMALIZING DIALECTICAL REASONING FOR COMPROMISE-BASED JUSTIFICATION.
DOI: 10.5220/0003181903550363
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 355-363
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

idea that compromise mechanisms should be calcu-
lated through reasoning mechanism. We give a formal
definition of compromise and an algorithm for dialec-
tical reasoning both on an abstract complete lattice.
We show that the algorithm is sound and complete
with respect to the compromise. We propose a con-
crete and sound algorithm for dialectical reasoning
characterized by definite clausal language and gener-
alized subsumption on the assumption that arguments
are constructed from knowledge bases. We expand
the argumentation system (Prakken, 1997) to han-
dle compromise arguments and illustrate that compro-
mise arguments realize compromise-based justifica-
tion towards argumentation for deliberation.
This paper is organized as follows. Section 2
gives a motivational example of dialectical thought
and Section 3 shows preliminaries. Section 4 defines
a notion of compromise and Section 5 proposes both
abstract and concrete algorithms for dialectical rea-
soning. Section 6 expands an argumentation system
and illustrates the effectiveness of compromise argu-
ments. Section 7 discusses the related works, and Sec-
tion 8 describes the conclusion and future works.
2 MOTIVATIONAL EXAMPLE
Let us consider the simple deliberative dialogue by
which agents A and B try to decide which camera to
buy. Theyare assumed to have their individual knowl-
edge bases from which they make arguments. The
worst situation for them is assumed that they cannot
buy any camera.
A : I want to buy ‘a’ because it is a compact and light
camera. (A
1
=[compact(a), light(a), camera(a),
∀x.compact(x) ∧ light(x) ∧ camera(x) → buy(x),
buy(a)].)
B : We cannot buy ‘a’ because it is out of stock.
(B
1
= [¬inStock(a),∀x.¬inStock(x) → ¬buy(x),
¬buy(a)].)
B : I want to buy ‘b’ because it is high-resolution
camera with a long battery life. (B
2
=
[resolution(b,high), battery(b,long),camera(b),
∀x.resolution(x,high) ∧ battery(x, long) ∧
camera(x) → buy(x),buy(b)].)
A : We cannot buy ‘b’ because it is beyond our bud-
get. (A
2
= [overBudget(b),∀x.overBudget(x) →
¬buy(x),¬buy(b)].)
Each A
1
,A
2
,B
1
, and B
2
is the argument that is a for-
mal description of the informal statement preceding
the argument. Both B
1
and A
1
, and A
2
and B
2
defeat
each other due to their logical inconsistency. Further,
A
1
and B
2
defeat each other due to the existence of al-
ternatives. In this situation, neither A
1
nor B
2
is justi-
fied by argumentation semantics, in other words, nei-
ther A
1
nor B
2
is nonmonotonic consequence. This
leads to the evaluation that both the options buy(a)
and buy(b) are unacceptable as a choice of A and B
and it is hard to prioritize these options within the
scope of logic. Of course, outside the scope of logic,
decision theory and game theory allow agents to pri-
oritize these options in different ways. However, it
is the case that they have to choose from the given
options under the situation that neither A nor B has
any other alternative options. On the other hand, in
real life, we often work out new options by giving up
some of our concerns and try to break such a stalemate
peacefully. Let us consider the following argument.
A : How about ‘c’ because it is user-friendly camera
with a long battery life. (A
3
= [userFriendly(c),
battery(c,long),camera(c),userFriendly(x) ∧
battery(x,long) ∧ camera(x) → buy(x),buy(c)].)
The option buy(c) concluded by A
3
reflects each
agent’s concerns partly, not completely, under the
background knowledge compact(x) ∧ light(x) →
userFriendly(x). For A, A
3
reflects user-friendliness
derived from the knowledge and the attributes that A’s
initial option buy(a) has. For B, A
3
reflects height
of resolution that B’s initial option buy(b) has. Ar-
guments are constructed from knowledge bases using
various kinds of reasoning. From the viewpoint of
logic, the question we are interested in here is: What
type of reasoning is needed to make the argument
with the compromise? Obviously, induction and ab-
duction do not address the compromise because they
aim to make up for lacks of knowledge so as to ex-
plain all of given examples. In the above dialogue,
one possible inductive hypothesis is a general rule
∀x.camera(x) → buy(x) when, for example, buy(a)
and buy(b) are assumed to be examples. The rule r :
∀x.userFriendly(x)∧battery(x,long)∧camera(x) →
buy(x) that allows A to make A
3
is not a hypothesis of
these reasoning, and therefore, the derivation of the
rule is outside of the scope of these reasoning. Deduc-
tion neither address the compromise because it aims
to derive all necessary conclusions of given theory. In
the above dialogue, deduction only derives the cam-
eras satisfying each agent’s concerns completely, not
partly. Therefore, deriving buy(c) is outside the scope
of deductive reasoning. We think agents need another
type of reasoning that finds a middle ground among
agents’ concerns such as r. We think that the studies
of such reasoning open up a new horizon for argumen-
tation in artificial intelligence especially in argument-
based deliberation or negotiation.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
356

3 PRELIMINARIES
A complete lattice is a 2-tuple of a set and a binary
relation of the set. Both of them are abstract in the
sense that the internal structures are unspecified.
Definition 1 (Complete Lattice). Let < L,> be a
quasi-ordered set. If for every S ⊆ L, a least upper
bound of S and a greatest lower bound of S exist, then
< L,> is called a complete lattice.
The abstract argumentation framework (Dung,
1995), denoted by AF, gives a general framework for
nonmonotonic logics. The frameworkallows us to de-
fine various semantical notions of argumentation ex-
tensions that intended to capture various types of non-
monotonic consequences. The basic formal notions,
with some terminological changes, are as follows.
Definition 2. (Dung, 1995) The abstract argu-
mentation framework is defined as a pair AF =<
AR,defeat > where AR is a set of arguments, and de-
feat is a binary relation on AR, i.e. defeat ⊆ AR×AR.
• A set S of arguments is said to be conflict-free if
there are no arguments A,B in S such that A de-
feats B.
• An argument A ∈ AR is acceptable with respect to
a set S of arguments iff for each argument B ∈ AR:
if B defeats A then B is defeated by an argument
in S.
• A conflict-free set of arguments S is admissible iff
each argument in S is acceptable with respect to
S.
• A preferred extension of an argumentation frame-
work AF is a maximal (with respect to set inclu-
sion) admissible set of AF.
An argument is justified with respect to AF if it is
in every preferred extension of AF, and is defensible
with respect to AF if it is in some but not all preferred
extensions of AF (Prakken and Sartor, 1997).
The argumentation system (Prakken, 1997) uses
Reiter’s default logic (Reiter, 1980) for defining inter-
nal structures of argumentsand defeat relations in AF.
The language consists of a first-order language L
0
and
a set of defeasible rules ∆ defined below. Informally,
L
0
is assumed to be divided into two subsets; one is
the set F
c
of contingent facts and the set F
n
of neces-
sary facts. A default theory is a set F
c
∪ F
n
∪ ∆ where
F
n
∪ F
c
is consistent. We extract some necessary def-
initions of the argumentation system (Prakken, 1997).
Definition 3. (Prakken, 1997)
• Let ϕ
1
,...,ϕ
n
,ψ ∈ L
0
. A defeasible rule is an ex-
pression of the form
ϕ
1
∧ · · · ∧ ϕ
j
∧ ∼ ϕ
k
∧ · · · ∧ ∼ ϕ
n
⇒ ψ
ϕ
1
∧ ··· ∧ ϕ
j
is called the antecedent, ∼ ϕ
k
∧
·· · ∧ ∼ ϕ
n
is called the justification and ψ is called
the consequent of the rule. For any expression
∼ ϕ
i
in the justification of a defeasible rule, ¬ϕ
i
,
classical negation of ϕ
i
, is an assumption of the
rule. And an assumption of an argument is an as-
sumption of any rule in the argument.
• Let ϕ
1
,...,ϕ
n
,ψ ∈ L
0
. Defeasible modus ponens,
denoted by DMP, is an inference rule of the form
ϕ
1
∧ · · · ∧ ϕ
j
∧ ∼ ϕ
k
∧ · · · ∧ ∼ ϕ
n
⇒ ψ ϕ
1
∧ · · · ∧ ϕ
j
ψ
• Let Γ be a default theory. An argument based
on Γ is a sequence of distinct first-order formu-
lae and/or ground instances of defaults [ϕ
1
,...,ϕ
n
]
such that for all ϕ
i
:
– ϕ
i
∈ Γ; or
– There exists an inference rule ψ
1
,...,ψ
m
/ϕ
i
∈
R such that ψ
1
,...,ψ
m
∈ {ϕ
1
,...,ϕ
i−1
}.
For argument A, ϕ is a conclusion of A, denotedby
ϕ ∈ CONC(A), if ϕ is a first-order formula in A.
ϕ is an assumption of A, denoted by ϕ ∈ ASS(A),
if ϕ is an assumption of a default in A.
• Let A
1
and A
2
be two arguments.
– A
1
rebuts A
2
iffCONC(A
1
)∪CONC(A
2
)∪F
n
⊢
⊥ and A
2
is defeasible and A
1
is strict.
– A
1
undercuts A
2
iff CONC(A
1
) ∪ F
n
⊢ ¬φ and
φ ∈ ASS(A
2
).
In the definition of defeasible rule, special sym-
bol ∼, called weak negation, is introduced in order
to represent unprovable propositions. It makes that
the language of the system has the full expressiveness
of default logic. In DMP, assumptions in defeasible
rules are ignored, and the ignorance can be correctly
disabled by undercutting. An argument is a deduction
incorporating default reasoning using defeasible rules
and DMP ∈ R . R is assumed to consist of all valid
first-order inference rules plus DMP. We say that an
argument is strict if there exist only valid first-order
inference rules in the argument. Otherwise, the ar-
gument is defeasible. Symbols ⊥ and ⊢ represent a
logical contradiction and a logical consequence rela-
tion, respectively. Rebutting caused by priorities of
defeasible rules is excluded from original definition.
Definition 2 takes no account of the aspect of
proof theory that gives a way to determine whether
an individual argument is justified or defensible. We
extract some necessary definitions of the proof theory
for argumentation system, called the dialectical proof
theory (Prakken, 1999).
Definition 4. (Prakken, 1999)
FORMALIZING DIALECTICAL REASONING FOR COMPROMISE-BASED JUSTIFICATION
357
• A dialogue is a finite nonempty sequence of moves
moves
i
= (Player
i
,Arg
i
) (i > 0), such that
1. Player
i
= P iff i is odd; and Player
i
= O iff i is
even;
2. If Player
i
= Player
j
= P and i 6= j, then Arg
i
6=
Arg
j
;
3. If Player
i
= P(i > 1), then Arg
i
strictly defeats
Arg
i−1
;
4. If Player
i
= O, then Arg
i
defeats Arg
i−1
.
• A dialogue tree is a tree of dialogues such that
if Player
i
= P then the children of move
i
are all
defeaters of Args
i
• A player wins a dialogue if the other player can-
not move. And a player wins a dialogue tree if it
wins all branches of the tree.
• An argument A is a provably justified argument if
there is a dialogue tree with A as its root, and won
by the proponent.
The condition 1 in the definition of a dialogue re-
quires that the proponent begins and then the players
take turns. Condition 2 prevents the proponent from
repeating moves and condition 3 and 4 are burdens
of proof for P and O. In the definition of a dialogue
tree, all defeaters for every arguments of P are con-
sidered. The idea of the definition of win is that if
P’s last argument is undefeated, it reinstates all previ-
ous arguments of P that occur in the same branch of a
tree, in particular the root or the tree. It is proved that
arguments are justified iff the arguments are provably
justified (Prakken, 1999).
4 SEMANTICS FOR REASONING
In this section, we give a declarative definition of rea-
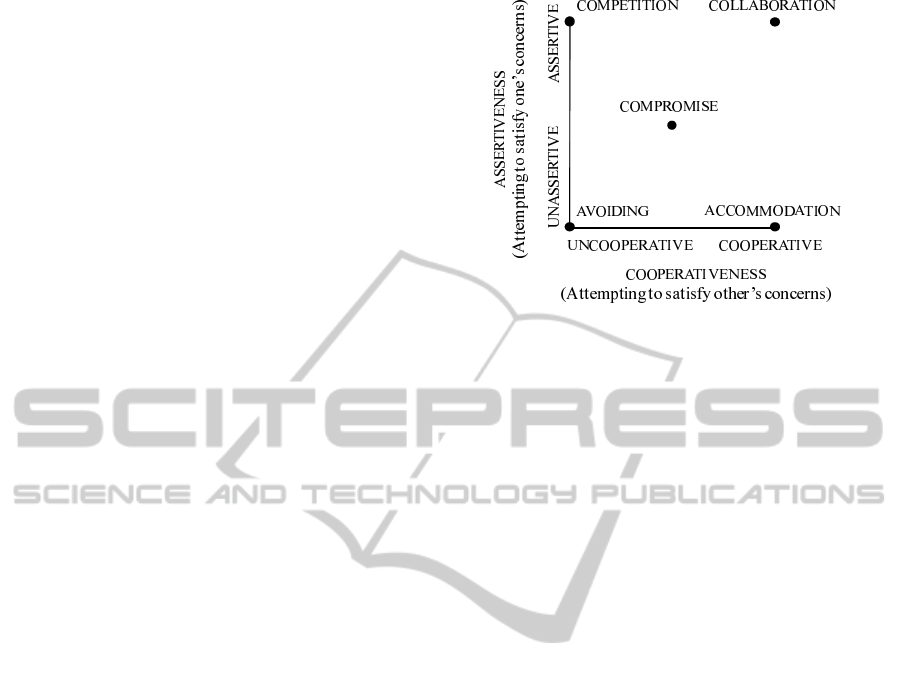
soning. Figure 1 shows the classification of our con-
flict handling modes into 5 groups (Thomas, 1992).
The vertical and the horizontal axes represent the
strength of assertiveness and that of cooperativeness,
respectively. Competition, collaboration, avoiding,
and accommodation are explained as assertive and
uncooperative mode, assertive and cooperative mode,
unassertive and uncooperative mode, and unassertive
and cooperative mode, respectively. Compromise is a
mode taking the middle attitude among the four. In
terms of importance in computational argumentation,
we focus on the notion of compromise and give more
concrete interpretation that compromise is a statement
satisfying each agent’s statement at least partly, not
completely. Our idea here is that we formally define
the notion of compromise using a complete lattice.
We impose two conditions, incompleteness and rel-
evance, as fundamental requirements to be compro-
Figure 1: Two-dimensional taxonomy of conflict handling
modes (Thomas, 1992).
mise. The incompleteness requires that compromise
must not satisfy each agent’s statement completely
and the relevance requires that compromise must sat-
isfy each agent’s statement at least partly. Further,
we impose additional two conditions, collaborative-
ness and simplicity, in order to capture our intuitions
about compromise. The collaborativeness requires
that compromise must retain a common ground that
all agents commonly have in advance. The simplicity
requires that compromise does not include any redun-
dant statements.
Definition 5 (Compromise). Let < L,> be a com-
plete lattice and X
1
,...,X
n
,Y be elements of L satisfy-
ing inf{X
i
| 1 ≤ i ≤ n} ≁ ⊥. Y is a compromise among
X
1
,...,X
n−1
, and X
n
iff
1. incompleteness: ∀X
i
(Y X
i
); and
2. relevance: ∀X
i
(inf{X
i
,Y} ≁ ⊥); and
3. collaborativeness: Y inf{X
j
| 1 ≤ j ≤ n}; and
4. simplicity: Y ∼ sup{inf{X
i
,Y} | 1 ≤ i ≤ n}.
Definition 5 says that there is no compromise
among X
i
(1 ≤ i ≤ n) if their common lower element
is only bottom. Intuitively, the condition states that
there is no common ground among X
i
(1 ≤ i ≤ n). The
incompleteness states that Y is not upper than X
i
, for
all X
i
. The relevance states that there exists a common
nonbottom greatest lower bound of {X
i
,Y}, for all X
i
.
The collaborativeness states that the common lower
element of all X
i
is also lower than Y and the sim-
plicity states that any lower element of Y is common
lower element of Y and X
i
.
Example 1 (compromise based on entailment). Let
L be propositional language that has all well-formed
formulae composed of alphabets A and B, and be
a satisfiability relation on L. < L,> is a com-
plete lattice shown in Figure 2. ⊤ and ⊥ denote
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
358

Figure 2: Complete lattice < L,>.
false and true, respectively, in accordance with com-
mon usage in inductive logic programming. Defini-
tion 5 is characterized as follows: 1. ∀X
i
(Y 2 X
i
),
2. ∀X
i
(2 X
i
∨ Y), 3. Y X
1
∨ · ·· ∨ X
n
, and 4. Y ≡
(X
1
∨Y) ∧ ·· · ∧ (X
n
∨Y). X ≡ Y denotes X Y and
Y X. Each of A∨ B,(A∨B) ∧(¬A∨ ¬B), and B is a
compromise between ¬A∧ B and A.
5 DIALECTICAL REASONING
5.1 Abstract Dialectical Reasoning
In this section, we give a procedural definition of di-
alectical reasoning that derives compromise. As with
the definition of compromise, the algorithm is formal-
ized on an abstract complete lattice < L,>. The
algorithm describes common procedures with which
each concrete dialectical reasoning complies.
The inputs of Algorithm 1 are X
1
,...,X
n
∈ L. Al-
gorithm 1 calculates a set of lower elements of each
X
i
(1 ≤ i ≤ n) at line 4. For every Y ∈ Y
i
, if Y satis-
fies the conditions given at line 6 then Y is collected
in W
i
at line 7. At line 12, the least upper bound of
{W
i
| 1 ≤ i ≤ n} is calculated and collected in Z. If
the least upper bound satisfies the condition at line
16 then it is eliminated from Z. In summary, the
overall reasoning process has two primal phases: de-
riving lower elements Y
i
of given X
i
(1 ≤ i ≤ n) and
the common upper element Z of the lower elements
Y
i
(1 ≤ i ≤ n). Note that we cannot detail the proce-
dures at lines 4, 6, 12 and 16 in Algorithm 1 anymore
because the complete lattice < L,> in Algorithm 1
is abstract. One of the algorithms with the concrete
procedures for dialectical reasoning will be given in
Algorithm 2. In Algorithm 1, we assume that these
derivation and the comparison are computable, i.e.,
there exist algorithms that can return the right answers
to the procedures at lines 4, 6, 12 and 16.
Theorem 1 (Soundness and Completeness). Let <
Algorithm 1: Dialectical Reasoning on < L, >.
Require: inf{X
i
| 1 ≤ i ≤ n} ≁ ⊥
1: Z :=
/
0
2: for i := 1 to n do
3: W
i
:=
/
0
4: compute Y
i
= {Y | Y X
i
}
5: for all Y ∈ Y
i
do
6: if Y ≁ ⊥ and Y inf{X
j
| 1 ≤ j ≤ n} then
7: W
i
= W
i
∪ {Y}
8: end if
9: end for
10: end for
11: for all (W
1
,...,W
n
) ∈ W
1
× ... × W
n
do
12: compute Z ∼ sup{W
i
| 1 ≤ i ≤ n}
13: Z = Z ∪ {Z}
14: end for
15: for i := 1 to n do
16: if Z X
i
then
17: Z = Z \ {Z}
18: end if
19: end for
20: return Z
L, > be a complete lattice and X
1
,...,X
n
,Z ∈ L
that satisfy inf{X
i
| 1 ≤ i ≤ n} ≁ ⊥. Z is a com-
promise among X
1
,...,X
n−1
, and X
n
iff Z is an ele-
ment of the output of Algorithm 1 where the inputs
are X
1
,...,X
n−1
, and X
n
.
Proof. (Soundness) If Z is an output of Algorithm 1,
Z obviously satisfies the condition of incompleteness
due to the conditionat line 16 in Algorithm 1. Further,
if Z is an output of Algorithm 1, there exists at least
one Y
i
X
i
for all X
i
such that Y
i
≁ ⊥,Y
i
inf{X
j
|
1 ≤ j ≤ n}, and Z ∼ sup{Y
i
| 1 ≤ i ≤ n}. Now we let
W
i
∼ Y
i
. Since Z ∼ sup{W
i
| 1 ≤ i ≤ n} and X
i
W
i
,
inf{X
i
,Z} W
i
. Since inf{X
i
,Z} W
i
and W
i
≁ ⊥,
inf{X
i
,Z} ≁ ⊥ for all X
i
. Therefore, relevance holds.
Since inf{X
i
,Z} W
i
and W
i
inf{X
j
| 1 ≤ j ≤ n},
inf{X
i
,Z} inf{X
j
| 1 ≤ j ≤ n} for all X
i
. Therefore,
collaborativeness holds. Since Z inf{X
i
,Z} for all
X
i
, Z sup{inf{X
i
,Z} | 1 ≤ i≤ n}. On the other hand,
since Z ∼ sup{W
i
| 1 ≤ i ≤ n} and inf{X
i
,Z} W
i
for all X
i
, Z sup{inf{X
i
,Z} | 1 ≤ i ≤ n}. Hence,
Z ∼ sup{inf{X
i
,Z} | 1 ≤ i ≤ n}, and therefore, sim-
plicity holds. (Completeness) It is sufficient to show
that, for all compromises Z among X
1
,...,X
n−1
, and
X
n
, (1) Z X
i
for all X
i
, and (2) there exists at least
one Y
i
X
i
for all X
i
such that Y
i
≁ ⊥, Y
i
inf{X
j
|
1 ≤ j ≤ n} , and Z ∼ sup{Y
i
| 1 ≤ i ≤ n}. The condi-
tion of incompleteness directly satisfies condition (1).
Nowwe letY
i
∼ inf{X
i
,Z}. Then,Y
i
≁ ⊥,Y
i
inf{X
j
|
1 ≤ j ≤ n}, X
i
Y
i
, and Z ∼ sup{Y
i
| 1 ≤ i ≤ n} are
satisfied, and therefore, condition (2) is satisfied.
FORMALIZING DIALECTICAL REASONING FOR COMPROMISE-BASED JUSTIFICATION
359

5.2 Concrete Dialectical Reasoning
We give a concrete and sound algorithm for dialectical
reasoning characterized by definite clausal language
and generalized subsumption. Generalized subsump-
tion is a quasi-order on definite clauses with back-
ground knowledge expressed in a definite program,
i.e., a finite set of definite clauses. It is approxi-
mation of relative entailment, i.e., logical entailment
with background knowledge, and it can be reduced to
ordinary subsumption with empty background knowl-
edge (Nienhuys-Cheng and de Wolf, 1997). The read-
ers are referred to (Buntine, 1988) for the definition.
Let L
1
be a definite clausal language, such that L
1
has
finite constants, finite predicate symbols and no func-
tion symbols, D ⊆ L
1
be a set of definite clauses that
have the same literal in their head, and ≥
B
be gener-
alized subsumption with respect to B where B ⊆ L
1
is a definite program. Algorithm 2 is the algorithm for
dialectical reasoning on complete lattice < D,≥
B
>.
Algorithm 2: Dialectical Reasoning on < D, ≥
B
>.
Require: B ∪ {X
i
} are satisfiable for all X
i
and
inf{X
i
| 1 ≤ i ≤ n} ≁ ⊥.
1: Z :=
/
0
2: for i := 1 to n do
3: W
i
:=
/
0
4: compute Y
i
⊆ {Y | Y is a tautology, or there
exists SLD-derivation of Y
′
with X
i
as a top
clause and members of B as input clauses and
Y ∈ ρ
m
L
(Y
′
).
5: for all Y ∈ Y
i
do
6: if Y is a definite clause, Y
+
α /∈ L and Y ⊒
{(X
1
∨ · · · ∨ X
n
)
+
θ} ∪ M then
7: W
i
:= W
i
∪ {Y}
8: end if
9: end for
10: end for
11: for all (W
1
,...,W
n
) ∈ W
1
× ... × W
n
do
12: compute LGS Z of {{W
+
i
σ
i
} ∪ N
i
| 1 ≤ i ≤ n}
13: Z := Z ∪ {Z}
14: end for
15: for i := 1 to n do
16: if Z ⊒ {X
+
i
φ
i
} ∪ O
i
then
17: Z := Z \ {Z}
18: end if
19: end for
20: return Z
The inputs of Algorithm 2 are B,D, X
1
,...,X
n
∈
D, and iteration number m for refinement operator ρ
L
for subsumption. ρ
L
denotes a downward refinement
operator for < C ,⊒> where C is a set of clauses. The
readers are referred to (Nienhuys-Cheng and de Wolf,
1997) for the definition of ρ
L
. In summary, ρ
L
is
a function whose input is a clause and output is a
set of clauses which the input clause subsumes. The
derivation is achieved by substituting functions, con-
stants or variables, or adding new literals for the in-
put clause. ρ
m
L
in Algorithm 2 means that ρ
L
is it-
erated m-time where an element of the output of ρ
i
L
is returned to the input of ρ
i+1
L
. Clause X subsumes
clause Y, denoted by X ⊒ Y in Algorithm 2, if there
exists a substitution θ such that Xθ ⊆ Y. For defi-
nite clause X, X
+
denotes a head of X and X
−
de-
notes a set of the literals in the body of X. S de-
notes a set of negations of formulae in set S. α,θ,σ
i
,
and ϕ
i
denote Skolem substitution for Y with respect
to B, Skolem substitution for X
1
∨ ·· · ∨ X
n
with re-
spect to B ∪ {Y}, Skolem substitution for W
i
with
respect to B ∪ {W
i
| 1 ≤ j ≤ n}, and Skolem substi-
tution for X
i
with respect to B ∪ {X
j
| 1 ≤ j ≤ n},
respectively. L,M,N
i
, and O
i
are the least Herbrand
models of B ∪Y
−
α,B ∪(X
1
∨·· · ∨X
n
)
−
θ,B ∪W
−
i
σ
i
,
and B ∪ X
−
i
φ
i
, respectively. For simplicity, we do not
explicitly describe the procedures for calculating the
Skolem substitutions and the least Herbrand models.
Under the restriction for L
1
we impose, there exists
a finite least Herbrand model on L
1
and it is com-
putable by fixed operator T
P
(Emden and Kowalski,
1976). We assume the results of the operator.
The computation at line 4 in Algorithm 2 is equiv-
alent to the computation of Y from X
i
and B, such that
X
i
≥
B
Y. This is based on the proposition that, for all
X,Y ∈ D, X ≥
B
Y iff there exists an SLD-deduction
of Y, with X as top clause and members of B as
input clauses (Nienhuys-Cheng and de Wolf, 1997).
In the algorithm, SLD-deduction is split into SLD-
derivation and subsumption, and refinement operator
ρ
L
for < L
1
,⊒> calculates subsumption. ρ
L
is com-
putable because of its locally finiteness (Nienhuys-
Cheng and de Wolf, 1997). At line 6, the algorithm
evaluates whether Y is a definite clause, Y ≁
B
⊥ and
Y ≥
B
inf{X
i
| 1 ≤ i ≤ n}. For decidability, general-
ized subsumption is translated to decidable ordinary
subsumption based on the proposition that if the least
Herbrand model of B ∪Y
−
σ is finite, then X ≥
B
Y iff
X ⊒ {Y
+
σ} ∪ M, for all X,Y ∈ D (Nienhuys-Cheng
and de Wolf, 1997). At line 12, the algorithm com-
putes the least generalization, under generalized sub-
sumption, of {W
i
| 1 ≤ i ≤ n} by alternatively comput-
ing the least generalization, under subsumption, de-
noted by LGS, of {{W
+
i
σ
i
} ∪ M
i
| 1 ≤ i ≤ n}. At line
16, the algorithm evaluates Z 6≥
B
X
i
for all X
i
by trans-
lating generalized subsumption to ordinary subsump-
tion. Therefore, the following proposition holds.
Proposition 1. Dialectical reasoning on < D,≥
B
>
is sound with respect to compromise on < D,≥
B
>.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
360

Example 2 (dialectical reasoning on < D,≥
B
>).
Consider the following two clauses and the back-
ground knowledge.
• X
1
= compact(x) ∧ light(x) ∧ camera(x) →
buy(x)
• X
2
= resolution(x, high) ∧ battery(x,long) ∧
camera(x) → buy(x)
• B = {compact(x)∧light(x) → user-Friendly(x)}
Following each Y
i
(i = 1, 2) is SLD-deducible with X
i
as top clause because X
i
subsumes Y
i
.
• Y
1
= battery(x,long) ∧ compact(x) ∧ light(x) ∧
camera(x) → buy(x)
• Y
2
= user-Friendly(x) ∧ resolution(x,high) ∧
battery(x,long) ∧ camera(x) → buy(x)
ρ
L
derivesY
1
from X
1
by adding literals ¬battery(y,z)
and substituting {y/x,z/long} into X
1
. ρ
L
derives Y
2
from X
2
by adding literal ¬userFriendly(y) and sub-
stituting {y/x} into X
2
. For simplicity, these literals
are arbitrary chosen to satisfy the condition at line 6
in Algorithm 2. Following L
1
,L
2
, and M are the least
Herbrand models of B ∪Y
−
1
{x/a} , B ∪Y
−
2
{x/b} , and
B ∪(X
1
∨ · · · ∨ X
n
)
−
{x/c}, respectively.
• L
1
= {battery(a,long), compact(a),light(a),
camera(a),user-Friendly(a)}
• L
2
= {user-Friendly(b),resolution(b,high),
battery(b,long),camera(b)}
• M = {compact(c),light(c),user-Friendly(c),
camera(c), resolution(c, high),battery(c,long)}
We let σ
1
= {x/d} and σ
2
= {x/e}. Then, the least
Herbrand models N
i
of B ∪Y
−
σ
i
are as follows.
• N
1
= {battery(d, long),compact(d), light(d),
camera(d),user-Friendly(d)}
• N
2
= {user-Friendly(e),resolution(e,high),
battery(e,long), camera(e)}
Then, following Z is the least upper bound, under sub-
sumption, of {{Y
+
i
σ
i
}∪ N
i
| 1 ≤ i ≤ n}, and therefore,
the least upper bound, under generalized subsump-
tion, of {Y
1
,Y
2
}.
• Z = user-Friendly(x) ∧ battery(x, long) ∧
camera(x) → buy(x)
By similar evaluation,Z turns out to be a consequence
of the dialectical reasoning.
In this paper, we focus on defining a concrete and
sound algorithm for dialectical reasoning, and we do
not address the problem with the search space reduc-
tion using various biases. We assume the results of
Example 2 in the next section.
6 COMPROMISE-BASED
JUSTIFICATION
6.1 Handling Compromise Arguments
In contrast to reasoning about what to believe, i.e.,
theoretical reasoning, reasoning about what to do, i.e.,
practical reasoning, is closely-linked to agents’ goals
or desires because it depends not only on their be-
liefs, but also on their goals. We assume that agents
have their common goal G described by a first-order
formula with zero or more free variables. Obviously,
compromise should be effective only in practical rea-
soning. In order to handle compromise arguments in
the argumentation system, we distinguish practical ar-
guments from theoretical argumentsbased on whether
the arguments satisfy a agents’ common goal or not.
An argument is called practical if it satisfies agents’
common goal, and otherwise it is called theoretical.
Definition 6 (Practical Argument). Let G be a goal
and A be an argument. A is a practical argument
for G if there exists a ground substitution α such that
CONC(A) ∪ F
n
Gα.
A ground substitution is a mapping from a finite
set of variables to terms without variables. We expand
the notion of compromise into practical arguments.
A compromise argument is a practical argument that
uses dialectical reasoning.
Definition 7 (Compromise Argument). Let G be a
goal and A,B,·· · ,M and N be distinct practical ar-
guments for G. A is a compromise argument among
B,· ·· , M and N if a ∈ CONC(A) is a compromise
among b ∈ CONC(B),...,m ∈ CONC(M) and n ∈
CONC(N).
The rebutting and the undercutting shown in Defi-
nition 3 can be viewed as theoretical in the sense that
the grounds of conflicts are logical contradiction. On
the other hand, practical arguments conflict each other
due to the existence of alternatives. Such practical
conflict occurs when they satisfy a same goal in dif-
ferent ways. We define the notion of defeat based on
the three perspectives: the rebutting, the undercutting
and the existence of alternatives.
Definition 8 (Defeat). Let G be a goal and A and B
be distinct arguments. A defeats B iff
• A rebuts B and B does not rebut A; or
• A undercuts B; or
• Both A and B are practical arguments for G such
that they have distinct substitutions α and β for
G, respectively, and B is not a compromise among
arguments, one of which is A.
FORMALIZING DIALECTICAL REASONING FOR COMPROMISE-BASED JUSTIFICATION
361

We say that A strictly defeats B iff A defeats B and B
does not defeat A.
6.2 An Illustrative Example
We detail the motivational example about camera de-
cision in Section 2. Both agents A and B are assumed
to have their common goal G ≡ buy(x) ∧ camera(x)
and the following individual knowledge bases, de-
noted by Γ
A
= F
A
n
∪F
A
c
∪∆
A
and Γ
B
= F
B
n
∪F
B
c
∪∆
B
,
respectively.
• F
A
n
= {camera(a),camera(c),overBudget(b),
∀x.compact(x) ∧ light(x) ∧ camera(x) → buy(x)
(= X
1
),∀x.overBudget(x) → ¬buy(x),
takeShoot(b,200)}
• F
A
c
= {compact(a),userFriendly(c)(= f
1
),
battery(c,long),∀x.compact(x) ∧ light(x) →
userFriendly(x)(= r
1
),∀x∀y.takeShoot(x,y)∧ >
(300,y) → ¬battery(x,long)(= r
2
)}
• ∆
A
= {∼ ¬light(x) ⇒ light(x)(= d
1
)}
• F
B
n
= {camera(b),¬inStock(a),
∀x.resolution(x,high) ∧ battery(x, long) ∧
camera(x) → buy(x)(= X
2
),∀x.¬inStock(x) →
¬buy(x), price(b,$200), ∀x∀y.price(x,y)∧ ≥
($300, y) → withinBudget(x)(= r
3
)}
• F
B
c
= {resolution(b,high)(= f
2
)}
• ∆
B
= {∼ ¬battery(x, long) ⇒ battery(x, long)
(= d
2
)}
Further, only deductive reasoning, DMP, and dialecti-
cal reasoning on < D,≥
B
> can be used for construct-
ing arguments. Agents construct arguments only
from their own individual knowledge bases with op-
ponent’s arguments previously stated. They advance
argumentation by constructing dialogue trees whose
roots are practical arguments, which means that they
try to justify their own practical arguments for G
straightforwardly. For readability, we express argu-
ments using proof trees to visualize the reasoning.
Deductive reasoning, DMP, and dialectical reasoning
are expressed by ‘—,’ ‘·· ·,’ and ‘= =,’ respectively.
Following A
1
,A
2
and A
3
, that A
2
strictly defeats A
1
and A
3
defeats A
1
, form a dialogue tree.
A
1
:
d
1
{x/a}
. . . . . . .. ..
light(a) compact(a) cam(a) X
1
buy(a)
A
2
:
¬inStock(a) ¬inStock(x) → ¬buy(x)
¬buy(a)
A
3
:
d
2
{x/b}
...... . . . .. .......
battery(b,long) f
2
cam(b) X
2
buy(b)
buy(a) concluded by A
1
is rated as unacceptable be-
cause A cannot win the dialogue tree. Then, in turn,
B tries to make a practical argument for G. Follow-
ing A
3
,A
4
,A
5
and A
6
with A
1
, that A
4
defeats A
3
, A
5
strictly defeats A
4
, A
6
strictly defeats A
3
, and A
1
de-
feats A
3
, form a dialogue tree.
A
4
:
∼ withinBudget(b) ⇒ ¬buy(b)
............. ....... .. .. .. . . . . . . .
¬buy(b)
A
5
:
price(b,$200) ≥ ($300,$200) r
3
withinBudget(b)
A
6
:
takeShoot(b,200) > (300,200) r
2
¬battery(b,long)
Neither B can win the dialogue tree. Thus, buy(b) is
rated as unacceptable. Neither of them can make an-
other practical argument for G using only deductive
reasoning and DMP. However, A can construct fol-
lowing compromise argument A
7
between A
1
and A
3
using dialectical reasoning in combination with these
reasoning. X
1
,X
2
, and Z in A
7
are same as Example
2.
A
7
:
X
1
X
2
r
1
Z f
1
battery(c,long) cam(c)
buy(c)
Neither A and B can make any defeating arguments
against A
7
. Thus, A
7
forms the dialogue tree by itself
and buy(c) is rated as acceptable . Note that the argu-
ment concluding buy(c) cannot be constructed from
Γ
1
∪ Γ
2
without dialectical reasoning.
7 RELATED WORKS
The prime difference between dialectical reasoning
and inductive or abductive reasoning is that whereas
the consequence of dialectical reasoning satisfies in-
completeness, given in definition 5, inductive and ab-
ductive hypotheses satisfy completeness. Moreover,
dialectical reasoning differs from deductive reason-
ing in the sense that the consequences of dialectical
reasoning are not necessarily deducible. For instance,
in Example 1, Z is not a semantical consequence of
B ∪{X
1
,X
2
}, although Z is a compromise between X
1
and X
2
. However, if the complete lattice is character-
ized by satisfiability relation, then any compromise is
a semantical consequence of the premises. Nonethe-
less, dialectical reasoning has significance because
neither of other reasoning mechanisms address what
compromise is and how agents infer compromise.
In (Amgoud et al., 2008), the authors introduce
the notion of concession as an essential element of
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
362

argument-based negotiation. They define concession
as a given offer supported by an argument that has
suboptimal state in argumentation. Thus, in contrast
to our approach, concession is not realized by reason-
ing mechanism. Similarly, game theory does not ad-
dress the rational generation of a new option although
it gives the way for rational choices. In (Sawamura
et al., 2003), the authors introduce seven dialectical
inference rules into dialectical logic DL and weaker
dialectical logic DM (Routley and Meyer, 1976) in or-
der to make concession and compromise from an in-
consistent theory. The authors, however, do not show
an underlying principle of these rules. Further, con-
trary to the philosophical opinion (Sabre, 1991), the
set of the premises of each inference rules is restricted
to logical contradiction. In contrast, we give the un-
derlying principle of dialectical reasoning by defining
abstract reasoning on a complete lattice. Further, as
shown in Example 2, we do not restrict the premises
to contradiction.
8 CONCLUSIONS AND FUTURE
WORKS
We defined compromise on an abstract complete lat-
tice, and proposed a sound and complete algorithm
for dialectical reasoning with respect to compromise.
Then, we proposed the concrete algorithm for the di-
alectical reasoning characterized by definite clausal
language and generalized subsumption. The concrete
algorithm was proved to be sound with respect to the
compromise. We expanded the argumentation sys-
tem proposed by Prakken (Prakken, 1997) to handle
compromise arguments, and illustrated that a compro-
mise argument realizes a compromise-based justifica-
tion towards argument-based deliberation.
We plan to elaborate more applicable algorithms
by incorporating language and search biases into our
algorithms. Furthermore, recently, some kinds of
practical reasoning are proposed for argument-based
reasoning (Bench-Capon and Prakken, 2006). How-
ever, there is little work that focuses on the rela-
tion between phases of argumentation and reasoning.
Especially, compromise should be taken at the final
phase of deliberation or negotiation. We will enable
agents to use appropriate reasoning depending on the
phase of argumentation.
REFERENCES
Amgoud, L., Dimopoulos, Y., and Moraitis, P. (2008). A
general framework for argumentation-based negoti-
ation. In Proc. of The 4th International Workshop
on Argumentation in Multi-Agent Systems (ArgMAS
2007), pages 1–17.
Bench-Capon, T. J. M. and Prakken, H. (2006). Justifying
actions by accruing arguments. In Proc. of The First
International Conference on Computational Models
of Argument (COMMA 2006), pages 247–258.
Buntine, W. (1988). Generalized subsumption and its appli-
cations to induction and redundancy. Artificial Intelli-
gence, 36:146–176.
Carnielli, W., Coniglio, M. E., and Marcos, J. (2007). Log-
ics of Formal Inconsistency, volume 14, pages 1–93.
Springer, handbook of philosophical logic, 2nd edi-
tion.
Dung, P. M. (1995). On the acceptability of arguments
and its funedamental role in nonmonotonic reasoning,
logic programming, and n-person games. Artificial In-
telligence, 77:321–357.
Emden, M. H. V. and Kowalski, R. A. (1976). The seman-
tics of predicate logic as a programming language.
Journal of the Association for Computing Machinery,
23:733–742.
Gordon, T. F. (1995). The Pleadings Game – An Artifi-
cial Intelligence Model of Procedural Justice. Kluwer
Academic Publishers.
Hamblin, C. L. (1970). Fallacies. Methuen.
Nienhuys-Cheng, S.-H. and de Wolf, R. (1997). Foundation
of Inductive Logic Programming. Springer.
Nisbett, R. E. (2003). The Geography of Thought: How
Asians and Westerners Think Differently ... and Why.
FREE PRESS.
Prakken, H. (1997). Logical Tools for Modelling Legal
Argument: A Study of Defeasible Reasoning in Law.
Kluwer Academic Publishers.
Prakken, H. (1999). Dialectical proof theory for defeasible
argumentation with defeasible priorities (preliminary
report). In Proc. of The 4th ModelAge Workshop ‘For-
mal Models of Agents’, pages 202–215.
Prakken, H. and Sartor, G. (1997). Argument-based ex-
tended logic programming with defeasible priorities.
Journal of Applied Non-classical Logics, 7:25–75.
Reiter, R. (1980). A logic for default reasoning. Artificial
Intelligence, 13:81–132.
Rescher, N. (2007). Dialectics – A Classical Approach to
Inquiry. ontos verlag.
Routley, R. and Meyer, R. K. (1976). Dialectical logic, clas-
sical logic, and the consistency of the world. Studies
in East European Thought, 16(1-2):1–25.
Sabre, R. M. (1991). An alternative logical framework for
dialectical reasoning in the social and policy sciences.
Theory and Decision, 30(3):187–211.
Sawamura, H., Yamashita, M., and Umeda, Y. (2003).
Applying dialectic agents to argumentation in e-
commerce. Electronic Commerce Research, 3(3-
4):297–313.
Thomas, K. W. (1992). Conflict and conflict management:
Reflections and update. Journal of Organizational Be-
havior, 13:265–274.
FORMALIZING DIALECTICAL REASONING FOR COMPROMISE-BASED JUSTIFICATION
363
