
EVALUATING THE COST OF SUPPORTING INTERACTION AND
SIMULATION THROUGH THE ENVIRONMENT
Flavien Balbo, Fabien Badeig
Universit
´
e Paris-Dauphine, LAMSADE, Place du Mar
´
echal de Lattre de Tassigny, 75016 Paris, France
Universit
´
e Paris Est, GRETIA, INRETS, 2 Rue de la Butte Verte, 93160 Noisy le Grand, France
Julien Saunier
Universit
´
e Paris Est, LEPSiS, UMR INRETS LCPC, 58 Bld Lef
`
ebvre, 75015 Paris, France
Keywords:
Environment, Evaluation, Communication, Activation.
Abstract:
The environment has emerged as a powerful first-order abstraction in Multi-Agent Systems (MAS), as well as
a critical building block. One benefit is to reduce the complexity of the agents by delegating to the environment
a part of the tasks of the system. This delegating process provides a flexible way to exchange information and
to coordinate the agents thanks to the environment. The counterpart is a centralization of a part of the MAS
processes inside the environment.
In this paper, we present the modeling of an environment for multi-agent communication and simulation. Our
proposition enables the addition of advanced features to the MAS like multi-party communications (communi-
cation) and contextual activation (simulation). We evaluate the cost of this environment process and compare
it to the execution of the same tasks in the agents for communication and simulation.
1 INTRODUCTION
In (Weyns et al., 2007), the authors give the follow-
ing definition of a multi-agent system (MAS) environ-
ment: “The environment is a first-class abstraction
that provides the surrounding conditions for agents
to exist and that mediates both the interaction among
agents and the access to resources”. The environment
is a critical building block in the multi-agent systems
that encapsulates its own responsibilities. The agents
interact in their environment and the effects of their
actions are observed and evaluated through this envi-
ronment. Thus, the environment provides observabil-
ity and accessibility services.
The relation between the environment and the
agents is traditionally based on a perception - decision
- action cycle (Weiss, 1999) which is repeated by the
agents during their life time. The three phases of the
cycle are executed in each agent. The perception be-
ing the agent ability to observe its environment, its re-
sult is the computation of what can be called contexts.
A context is defined as a set of information that can be
used to characterize a situation. This set of informa-
tion includes percepts and messages that are obtained
by the agent and its own state. Thanks to the context
computation, the agent decides to execute the suitable
action. The relation between the environment and the
agents based on this perception - decision - action cy-
cle does not exploit the potential of the environment
that remains a static entity. This relation can be en-
hanced by delegating the perception process to the en-
vironment (Weyns et al., 2004; Badeig et al., 2007;
Saunier and Balbo, 2009; Kesaniemi et al., 2009).
The objective is to support advanced features that are
difficult to obtain without the environment.
We have proposed an environment modelling and
the adequate platform that are based on the delega-
tion of the perception process to the environment. Our
proposition supports two advanced features: 1) Multi-
Party Communications (MPC) (Branigan, 2006) takes
into account dyadic interaction (one to one), group
interaction (one to many) and overhearing (many to
one/many) within the same interaction process; 2)
Contextual activation (Laberge, 1975) applied to the
simulation process consists in activating the agents di-
rectly according to their context.
126
Balbo F., Badeig F. and Saunier J..
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE ENVIRONMENT.
DOI: 10.5220/0003182001260135
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 126-135
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

In our proposition, despite the delegation process
to the environment, the agents keep their autonomy
because the decision process and the action process
remain in the agents. The perception phase of the
cycle is modified to take into account the relation
with the environment. That means that the environ-
ment computes the contexts for the agents, and that
the agents can modify this computation process of
the environment to suit their needs: the agents de-
cides which contexts are important for them and act
by modifying in consequence the computation pro-
cess that is executed by the environment.
In our proposition, in the MPC case, the environ-
ment mediates the communication: the context is the
information about the agent receiver, the message and
any other environment information which is relevant
to this communication. if the context is validated,
the environment addresses the messages to the related
agents. In the simulation case, the environment is
the scheduler that manages the agent activation: the
context is the subset of information accessible to the
agents. The environment activates an agent in a spe-
cific context and according to this context, the agent
performs the suitable action.
To adapt the perception process to each agent, the
environment needs ‘tools‘ to compute their contexts.
In our proposition, these tools are filters that reify
the relation between an agent (described in the envi-
ronment) and its contexts. A filter contains the con-
straints on the context related to an action of an agent.
This action is the reception of a message for com-
munication filters and a specific agent action to per-
form after validation for activation filters. The agents
modify their relation to the environment thanks to the
addition and removal of their filters in the environ-
ment. This process is dynamic and the environment
activates only its current filters. These choices (ad-
dition/removal) belong to the decision process that is
managed by each agent.
The externalization of the computation of the per-
ception process improves qualitatively the design of a
MAS. The dynamic filter management by the agents
gives more flexibility to the MAS design. More de-
tails on qualitative improvement are given in (Saunier
and Balbo, 2009) for communication and in (Badeig
et al., 2007) for simulation. The counterpart is a cen-
tralization of a part of the MAS processes inside the
environment. In this paper, we evaluate the cost of
this centralization for computing agent contexts, in
comparison to the execution of equivalent solutions
for communication and simulation.
Section 2 motivates the delegating process of tasks
to the environment for communication and simulation
and introduces an illustrative example with different
examples issued of a crisis management application.
Section 3 presents the environment model. Section
4 provides a theoretical evaluation. In section 5, we
provide an empirical evaluation, and we conclude in
section 6.
2 MOTIVATIONS
2.1 Communication
Recent research on multi-party communications
(Branigan, 2006; Saunier and Balbo, 2009) shows
how multi-agent communications can take advantage
of the complexity of the human communication pro-
cess. The main issue in supporting MPC is to take
into account dyadic interaction (one to one), group
interaction (one to many) and overhearing (many to
one/many) within the same interaction process. The
sender does not know all the agents that might be in-
terested in its messages. For example, an agent can
listen to messages without the agreement/knowledge
of the sender through overhearing. For a recipient, the
usefulness of a message may depend on the context of
the sender, the context of the message, and the context
of the recipient itself.
These challenges are related to the way the re-
cipients are chosen. MPC requires knowledge of the
needs of both the sender and the recipients. From the
sender viewpoint (direct interaction), it is a connec-
tion problem: which agents are related to my mes-
sage? The problem is to map the senders needs (infor-
mation, capabilities, resources, ...) to the address of
related agents. From the recipient viewpoint (indirect
interaction), it is a data extraction problem: which
messages are related to me? The problem is to map
the recipients needs to the content of the messages.
For each message, these problems have to be simulta-
neously solved by the communication infrastructure.
The environment is able to solve these problems by
mediating the communication in order to find all the
receivers of each message. Nevertheless, in the cog-
nitive agents community, few works explicitly present
the environment as an interaction support. For direct
interaction, the environment is often associated to an
infrastructure that supports point to point communi-
cation. For indirect interaction, cognitive agents use
specific services that are based on the management
of a shared collection of data (e.g. (Picco and Bus-
chini, 2002)) that may be understood as a part of the
environment. There is therefore a separation between
the solutions to realize direct and indirect interaction
although the environment provides a suitable frame-
work to unify them (Platon et al., 2005).
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE
ENVIRONMENT
127

If the computation of the context does not take into
account ambient conditions, it can classically be done
inside the agents. This solution implies that the agents
receive all messages and filter them. An evaluation of
the environment support consists in the cost compar-
ison of the context filtering either in each agent after
the reception or in the environment during the trans-
mission process.
2.2 Agent-based Simulation
In a simulation, the scheduling policy defines the acti-
vation order of the agents. Once activated, the agents
behave according to their context. How the agents are
activated and what information is available to com-
pute the agent context depend on the agent-based sim-
ulation (ABS) framework.
In most ABS frameworks, a scheduler activates
the agents one after the other and each activated agent
computes its context to choose one action to execute
at each simulation step. The classical ABS frame-
works are designed to support this activation process.
For example, in the platforms CORMAS (Bousquet
et al., 1998) and MASON (Luke et al., 2005), the
scheduler activates a standard method for each agent.
This method is specialized by the designer to adapt
the agent behavior. In the Logo-based multi-agent
platforms such as TurtleKit (Gutknecht and Ferber,
2001) or the STARLOGO system
1
, an agent has an au-
tomaton that determines the next action to perform.
The choice of these platforms to be agent-
oriented, with a light environment support, implies
that the computation of the context is repetitive be-
cause it is computed in each agent at each time cy-
cle during the simulation execution. This computa-
tion is done in each agent even if the agent context
does not change between two time cycles and/or if
several agents share the same context during a time
cycle. Here, the evaluation consists in the cost com-
parison of the context filtering either in each agent
after the activation or in the environment during the
scheduling process.
Example. In this paper, we consider a crisis man-
agement application where several emergency ser-
vices must be coordinated in order to reduce the crisis
effects. A crisis situation is a dynamic phenomenon
defined by the initial situation, which depends on
place and time, and by the impact on population and
infrastructure. We focus our example on a specific
point which is the victim evacuation. This task con-
sists in coordinating two agents playing the role medi-
cal porter. The goal of the medical porters is to shift a
1
http://education.mit.edu/starlogo/
victim to an emergency vehicle. This action requires
one medical porter with the skill medical monitoring
and one medical porter with the skill victim handling.
The first skill allows the medical porter to monitor the
victim and to inform the hospital of the evolution of
the victim health. The second skill is necessary to
handle correctly the victim.
Each simulation component (agents, messages
and objects) is situated on a grid, i.e. a two-
dimensional space. In this example, we consider that
the victims belong to the set of the objects because
they are not autonomous. The agents (medical porter)
act in this environment and cooperate in order to evac-
uate victims. A medical porter can move randomly
or towards a given direction, and it possesses only
one skill. It can either monitor or handle a victim,
but the two skills are required to evacuate the victim.
The agents can communicate in order to find a partner
with the complementary skill. Each agent has a field
of perception that limits its perception of the environ-
ment. A medical porter is able to perform one of the
following actions in a time cycle of simulation: 1) the
action move randomly, 2) the action move towards a
location, 3) the action wait, and 4) the action evacuate
a victim.
We use this application along the paper to illus-
trate our study of the cost of the environment support-
ing interaction and simulation.
3 ENVIRONMENT MODELING
To support multi-party communications and contex-
tual activation, we propose to use the environment as a
privileged intermediary to control interaction (EASI,
Environment as Active Support for Interaction) and
activation (EASS, Environment as Active Support for
Simulation). The EASS model (Badeig et al., 2007)
embeds the EASI model (Saunier and Balbo, 2009).
The environment manages meta-informations on the
MAS (agents, messages, context) and uses them to
compute the agent context(s). In this section, we
give the background elements to understand the as-
sessment of the cost of the environment. More details
about the models can be found in [?]
3
.
The environment model EASI is thus defined by
hΩ,D, P,F i with:
• Ω = {A ∪ M S G ∪ O} = {ω
1
,...,ω
m
} the set of
entities (with A the set of agents, M SG the set of
messages and O the set of objects, i.e. all entities
that are not agents or messages),
• D = {d
1
,...,d
m
} the set of domain descriptions of
the properties,
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
128
• P = {p
1
,..., p
n
} the set of properties,
• F = { f
1
,..., f
k
} the set of filters.
Entity: An entity ω
i
∈ Ω is defined by he
r
,e
d
i
where e
r
is a reference to an element of the MAS
and e
d
is the description of that element. An ele-
ment of the MAS can be an agent, a message or an
object. A reference is its physical address on the plat-
form or other objects (such as URL, mailbox, etc.).
The description e
d
is a set of couples hp
i
,v
j
i where
p
i
∈ P and v
j
is the value of the property for the en-
tity. Any agent of the MAS has its own processing
and knowledge settings. It is connected to the envi-
ronment thanks to its description that the environment
stores and updates. This description e
d
is used for the
routing of the informations to the agent with the ref-
erence e
r
(EASI) or its activation (EASS). The agents
can modify their description dynamically.
Property: A property p
i
∈ P : Ω →
d
j
∪ {unknown,null} is a function whose description
domain d
j
∈ D can be quantitative, qualitative or a
finite set of data. The unknown value is used when
the value of the property cannot be set, and null is
used to state that the property is undefined in the
given description. In order to simplify the notation,
only the value of the description domain d
j
is given
to specify a property.
Filter: A filter identifies the entities according to
their description (e
d
) and realizes the interaction be-
tween the concrete objects (e
r
). A filter f
j
∈ F is
a tuple f
j
= h f
a
,[ f
m
],[ f
C
],n
f
i with n
f
the filter name.
The assertion f
a
: A → {true, f alse} identifies the re-
lated agents, the assertion f
m
: M SG → {true, f alse}
identifies the related messages, and f
C
: P (Ω) →
{true, f alse} is an optional set of assertions identify-
ing other entities of the context. A filter is considered
valid for any tuple hagent,[message],[context]i such as
f
a
(agent)[∧ f
m
(message)][∧ f
C
(context)] is true.
The choice of the action specializes the filter. Ev-
ery agent a whose description validates f
a
is activated
if there exists a set of entities in the context such that
f
C
is true. After its activation, the agent validates the
action related to this context and executes it (or not).
It is a communication filter if the action is to add the
message m that satisfies f
m
in the message box of the
agent a. The agents can add and remove dynamically
the filters. Thus, they adapt their relation with the en-
vironment according to their needs.
In a crisis simulation, the agents have observable
properties: their identifier, which is unique, their loca-
tion, their availability (true/false values) which spec-
ifies if an agent rescues a victim, their skill (posi-
tion/monitoring), their field of vision, and their inter-
nal time. The messages have the following properties:
their identifier that is unique, their sender identifier,
the message type (’request’/’accept’), their location
which is the location of the sender when the message
is put in the environment, and the skill required by
the sender in the case of communication. The victims
have three properties: their identifier, their location
and their status (stretcher/vehicle). The victims to be
evacuated must be diagnosed; this is expressed by the
property diagnosed (true/false values). The following
table sums up the properties of the MAS components
descriptions:
property Medical porter Message Victim
id x x x
location x x x
availability x
vision x
time x x
skill x x
id
sender
x
type x
id
v
x
status x
diagnosed x
In the simulation example, let f
e
be a communica-
tion filter related to the following context: an agent is
interested by a message if it is available ( f
a
), if the re-
quest message is close to the agent a and a has the re-
quested skill ( f
m
) and if the victim has been diagnosed
( f
c
). In this example, f
c
contains one entity which is
a victim identified by the property id
v
of the message.
The request messages have information about the vic-
tim location and the skill of the medical porter.
The processing of the context is traditionally done
by the agents, but in EASI and its extension EASS it
is done by the environment. In this way, the computa-
tion can be done with information that is shared by the
agents (the entities descriptions) and with a degree of
mutualization. However, it implies the centralization
of the computation and the management of the infor-
mation update. Now, we propose to evaluate the cost
of this centralization.
4 THEORETICAL ASSESSMENT
The theoretical assessment is the comparison between
the processing by the environment of a communi-
cation filter for n
a
agents and the processing by n
a
agents of all the messages. In order to take into ac-
count the context dynamics, this theoretical assess-
ment also studies the update process of the MAS.
The theoretical assessment is based on two criteria.
The first, noted Cost
T
, is the number of tests per-
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE
ENVIRONMENT
129

formed during the filtering process and the second,
noted Cost
M
, is the number of resulting messages.
The objective is to identify in which cases it is better
to mediate the communication through the environ-
ment than to manage it in the agents.
Following the definition given in section 3, a filter
f has tests related to one agent description ( f
a
), one
message description ( f
m
) and a subset of entities ( f
c
).
To simplify the explanation, we assume there is only
one entity to match f
c
and this entity cannot be an
agent. This last assumption implies that there is no
additional cost for the update process if the message
processing is executed by the agents. The following
generic filter illustrates our assessment, it is shown in
a classical “if” structure:
Tests N
i f ∧
i=1..n
T
m
i
(?m) (1)
and ∧
i=1..n
T
a
i
(?a) (2)
and ∧
i=1..n
T
a,m
i
(?a,?m) (3)
and ∧
i=1..n
T
c
i
(?c) (4)
and ∧
i=1..n
T
m,c
i
(?m,?c) (5)
and ∧
i=1..n
T
a,c
i
(?a,?c) (6)
The elements ?a,?m and ?c are variables that re-
spectively match an agent, a message and an entity.
Let T
x
i
be a test on a x entity and T
x,y
i
a test between
two entities. For the filter example f
e
: an agent (?a) is
interested by a request message (?m) (1) if it is avail-
able (2), if this request message is close to the agent
and the agent ?a has the skill specified in the message
(3) and if the victim to evacuate (?c) (5) is diagnosed
(4). T
a
1
(?a) is the result of the first test on an agent
related to its availability and ∧
i=1..n
T
a
i
(?a) are all the
tests on the agent receiver. T
a,m
1
(?a,?m) is the result
of the first test on an agent and a message related to
the requested skill and ∧
i=1..n
T
a
i
(?a,?m) are all the
tests on the receiver and the message.
Evaluation of the Number of Tests. A filter is
composed of two types of tests. The first type is a
comparison between the value of a property and a
constant: the tests (1)(2)(4). The second type of test
implies a matching process: the tests (3)(5)(6). For
each of these types the cost in number of tests is re-
lated to the number of entities that have to be tested
and on the result of the previous tests on the same set
of entities. For example, the number of agents that
is tested by T
a
2
(?a) is related to the number of agents
that have validated the test T
a
1
(?a). Let t
i
be the per-
centage of entities that validates the test i.
Let |C
i
| be the number of tests and C
i
be the num-
ber of evaluated tests of (i), the value of C
i
is:
C
i
=
1 +
|C
i
|
∑
j=1
j
∏
k=1
t
k
if |C
i
| > 1
1 if |C
i
| = 1
0 if |C
i
| = 0
The cost of a filter is the sum of the costs of its
tests (sequentially validated). The following table
gives the cost of the generic filter if one message has
to be processed by the environment (column E) or by
the n
a
agents (column A) .
N E A tested entities
(1) C
1
n
a
∗C
1
n
m
= 1
(2) n
a
∗C
2
n
a
∗C
2
all the agents
in E and each
agent individu-
ally (A)
(3) p
2
∗ n
a
∗C
3
p
2
∗ n
a
∗C
3
p
2
= percent-
age of agents
that have the re-
quested state
(4) n
c
∗C
4
(p
2
∗ p
3
∗
n
a
)∗ n
c
∗C
4
n
c
=number of
entities that are
tested in (4).
p
3
= percent-
age of agents
that are related
to the message.
(5) p
4
∗ n
c
∗C
5
(p
2
∗ p
3
∗
n
a
) ∗ (p
4
∗
n
c
) ∗C
5
p
4
=percentage
of entities re-
lated to the con-
text (4)
(6) (p
2
∗ p
3
∗
n
a
) ∗(p
5
∗
p
4
∗n
c
)∗C
5
(p
2
∗ p
3
∗
n
a
) ∗ (p
5
∗
p
4
∗n
c
)∗C
5
p
5
=percentage
of entities vali-
dating (5)
There are two differences between these two pro-
cessing: 1) the factorization of the tests if the process-
ing is executed by E; 2) the implicit elimination of the
agents if the processing is executed by the agents. If
the processing is executed by E the tests are factor-
ized, for example (1) is executed only once and is re-
peated for n
a
agents. Each test (i) that is false implies
an elimination of the agent that executes the the pro-
cessing. For example in (5) only the subset of agents
where the test (4) is validated continue the processing.
Following the hypothesis that the filtering and the
shared information are the same, the matching done
by the agents is more costly than by the environment
for the tests (1)(4)(5) and are the same for (2)(3)(6).
We conclude that the mediation by environment is al-
ways better than the broadcast when at least one agent
is interested in the message. Nevertheless the im-
plicit agent elimination implies that if the agents do
not share all information some part of the filter evalu-
ation can be less costly for the agents than for the en-
vironment. This parameter will be empirically tested
in section 5.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
130

Moreover, the environment and the agents need
the same information to process the filters and the re-
sult has to be balanced by the cost of the access to this
information.
Evaluation of the Number of Messages. If the ex-
change of information is done via messages, there are
two types of messages to take into account: 1) the
messages related to the interactions in the MAS such
as the request messages in our example f
e
; 2) the
messages related to the update process.
Firstly we evaluate the number of messages that
are the result of the interaction in the MAS. Let n
m
be the number of messages sent by the agents, let p
r
be the average percentage of agents that have to re-
ceive the messages. If the matching process is exe-
cuted by the environment then each message is sent
to the environment, and the environment transmits it
to the p
r
∗n
a
receivers. The total number of messages
is therefore n
m
(1 + p
r
∗ n
a
). If the matching process
is executed by the agents, then each message is sent
to all the agents which locally execute the matching
process. The total number of messages is therefore
n
m
∗ n
a
. Except if p
r
is close to 1 which means that
the message is related to all the agents, the environ-
ment mediation is less costly. The more the selection
is important, the more the mediation by the environ-
ment is beneficial.
Secondly we evaluate the number of messages that
are the result of the update process of the MAS. To
simplify, we consider only the update process of the
descriptions of the agents and not of the context, al-
though the principle is the same. In our example, it
implies that the state of the victims is not updated (or
that its cost is the same if it is computed by the envi-
ronment or by the agents). When an agent is updated
all its properties are updated in the environment. Re-
member that the filter example does not contain tests
on the state of the agents to compute the context ( f
c
).
Hence, the computation by the agents does not im-
ply additional costs because we suppose the agents
do not need to access updated information about the
other agents, which is an underestimation of the cost
of the ”agent” solution.
When the communication is mediated by the en-
vironment, the agents update their descriptions by
putting in the environment new descriptions that re-
place the old ones. This action is associated to the
sending of a message. One agent can make between
0 and n updates during a time period. Let f req
a
be
the average frequency of the description update dur-
ing a time period. There is therefore f req
a
∗n
a
update
messages if the interaction is mediated by the environ-
ment during the reference time period.
To have the total cost according to the number of
Figure 1: Comparison of the cost with p
r
= 0.6 and n
a
=
100.
messages criteria we have to sum these costs. Let
Cost
E
M
= n
m
(1 + p
r
n
a
)+ f req
a
n
a
be the total environ-
ment cost and Cost
A
M
= n
m
n
a
be the total agents cost.
To compare these two costs, we study the sign
of the subtraction of the two costs Cost
M
= Cost
E
M
−
Cost
A
M
in order to find when the environment medi-
ation is more costly than the local computation in
function of the number of messages and of the fre-
quency of the update process. The resulting formula
is Cost
M
= n
m
(1 + n
a
(p
r
− 1)) + f req
a
n
a
. Figure 1
gives the plan corresponding to this function in the
three dimensional space (message, agent update, cost)
if the number of agents (n
a
) and the average propor-
tion of receiver (p
r
) are respectively fixed to 100 and
0.6. These assessment parameters are unfavourable
to the mediation by the environment: 1) the cost of
the update process is not taken into account when the
context is computed by the agents; 2) the agents are
interested by more than half the messages. Neverthe-
less we can see that there are few cases in which the
use of the environment is more costly than the local
matching according to the number of messages crite-
ria.
The function Cost
M
(n
m
, f req
a
) = 0 enables to find
the number of messages dedicated to the interaction
in the MAS (m) that have to be mediated by the envi-
ronment to compensate the cost of the update process
( f req
a
). The relation between these two parameters
is n
m
= −(n
a
/(1 + n
a
(1 − p
r
))) ∗ f req
a
, the value of
n
m
is therefore inversely proportional to the propor-
tion of the agents interested in the messages. Figure 2
illustrates this proposition. The environment area rep-
resents the cases where it is better to use the environ-
ment than to mediate the messages in function of the
number of messages. For instance, with f req
a
= 2,
if there is more than 5 messages related to the inter-
action in the MAS, then it is better to use the envi-
ronment to mediate the communication even if that
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE
ENVIRONMENT
131

Figure 2: Comparison of the number of messages in func-
tion of the agent update frequency with p
r
= 0.6 and n
a
=
100.
means that there are f req
a
n
a
= 200 messages related
to the update process.
This study has been done in the worst case for
the environment because the agents are not taken into
account to evaluate the interaction context ( f
c
). If it
were the case, there would be no modification of the
update cost of the environment. However, when the
matching is executed by agents, the number of mes-
sages in the update process would be increased by
f req
a
(n
a
− 1) (the cost of broadcasting the descrip-
tion updates), thus improving the comparative envi-
ronment performance.
In this section the assessment has been done with
the hypothesis that the agents have the same informa-
tion to evaluate a filter. In the next section, we depict
how these results relate to real experimentation where
this hypothesis is not valid.
5 EMPIRICAL ASSESSMENT
In section 4, we have shown that using the environ-
ment to compute the contexts is less costly than com-
puting them locally in the agents when the agents up-
date frequency is not too high. In other words, the en-
tities dynamics is the parameter that determines which
solution is the best for a multi-agent system. This
section consists in evaluating the cost of the context
computing on a real example that is a simulation of
the victim evacuation in the crisis situation. The sim-
ulation run-time results aggregate the previous calcu-
lations.
A prototype of our ABS framework has been im-
plemented as a plugin for the multi-agent platform
Madkit (Gutknecht and Ferber, 2001). This plugin is
composed of an environment component with an API
that enables the agents to add/retract/modify their de-
scriptions and filters. We have chosen to implement
the matching process within a Rules-Based System
(RBS). The instantiation of the model into a RBS is
straightforward: the descriptions are the facts of the
rule engine, and the filters are its rules. Rule firing is
based on the efficient RETE algorithm (Forgy, 1982).
It is a network-based algorithm designed to speed the
matching of patterns with data. RETE uses a static
discrimination network, generated by the language
compiler, that represents data dependencies between
rule conditions.
We compare our model which encompasses con-
textual activation by the environment with a model
which encompasses a classical activation process to
evaluate the cost of supporting the simulation process
through the environment. We have tested two sim-
ulation scenarios, without and with communication,
using ten filters: seven filters for contextual activa-
tion ( f
1
to f
7
), two filters for communication ( f
recept
and f
accept
) and one filter for classical activation
f
classicalactivation
. Except for the filter f
classicalactivation
,
each activation filter allows to activate an agent med-
ical porter in a specific context to perform an action.
The filter f
classicalactivation
is used in the scenarios S
1
and S
3
in order to simulate a classical activation pro-
cess. This filter activates each agent once by simula-
tion cycle. It does not take into account the context.
The scenarios are defined below. S
1
and S
2
are
scenarios without inter-agent communication, and S
3
and S
4
are scenarios with inter-agent communication:
• –S
1
– { f
classical activation
} + Local Agent Context
Analysis (LACA),
• –S
2
– { f
1
, f
2
, f
3
, f
4
, f
5
},
• –S
3
– { f
classical activation
} + LACA + Broadcast,
• –S
4
– { f
1
, f
2
, f
3
, f
4
, f
5
, f
6
, f
7
} + { f
recept
, f
accept
}
S
1
illustrates a classical scenario with an activation
phase and a local agent context analysis; S
2
is a sce-
nario with a contextual activation inside the environ-
ment. We describe the filters of S
2
. The filter f
1
al-
lows to activate the action move randomly that is trig-
gered when a medical porter has no victim next to it
(context victim seeking). The filters f
2
and f
3
corre-
spond to the association of the action move towards
a location with the contexts closest victim discovery
( f
2
) and handled victim discovery ( f
3
). The context
closest victim discovery happens when an agent per-
ceives the closest victim to evacuate in its perception
field. The context closest victim discovery depicts the
situation where an agent medical porter perceives a
victim that is handled by another medical porter. The
filter f
4
activates the action wait and triggers when a
medical porter is alone close to a victim to evacuate
(context victim proximity). The filter f
5
corresponds
to the association between the action evacuate victim
and the context rescue victim. This context appears
when two medical porters with the complementary
skill are close to a victim ready to be evacuated. This
context is related to the following information: the
availability of the porters, the location of the porter
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
132
and the victim. The comparison between S
1
and S
2
enables to study the cost of the activation process.
S
3
and S
4
are the extensions of respectively the
scenarios S
1
and S
2
with the communication filters
f
recept
and f
accept
, and the associated activation fil-
ters f
6
and f
7
. The filters f
recept
and f
accept
provide
the support for the communication process: f
recept
en-
ables the reception of the request messages and f
accept
enables the reception of their answer(s). When the
agents communicate, the simulation has to manage
two new agent actions that are activated by the filters
f
6
and f
7
. The filter f
6
is related to the action con-
tact: an agent puts a request message in the environ-
ment and waits for an answer. The filter is activated
when the agent is close to a victim to evacuate but
does not have another agent nearby to evacuate this
victim. The filter f
7
is related to the action coordina-
tion: an agent answers to the contact agent and moves
towards the victim location. The context of this fil-
ter is the reception of a request message containing
the location of the victim. The comparison between
S
3
and S
4
enables to study the cost of the activation
when the medical porters use communication proto-
col to contact another medical porter with the skill
required.
Activation. We have run three series of simulations
characterized by two parameters: number of agents
medical porters and field of vision. For each series
of simulations, we evaluate our model using the aver-
age run-time over 50 simulations with similar param-
eters. In the first group, we have experimented with 5
medical porters with the skill “health monitoring”, 5
medical porters with the skill “victim handling” and 5
victims, in the second group with 15 of each, and in
the third group with 20 of each.
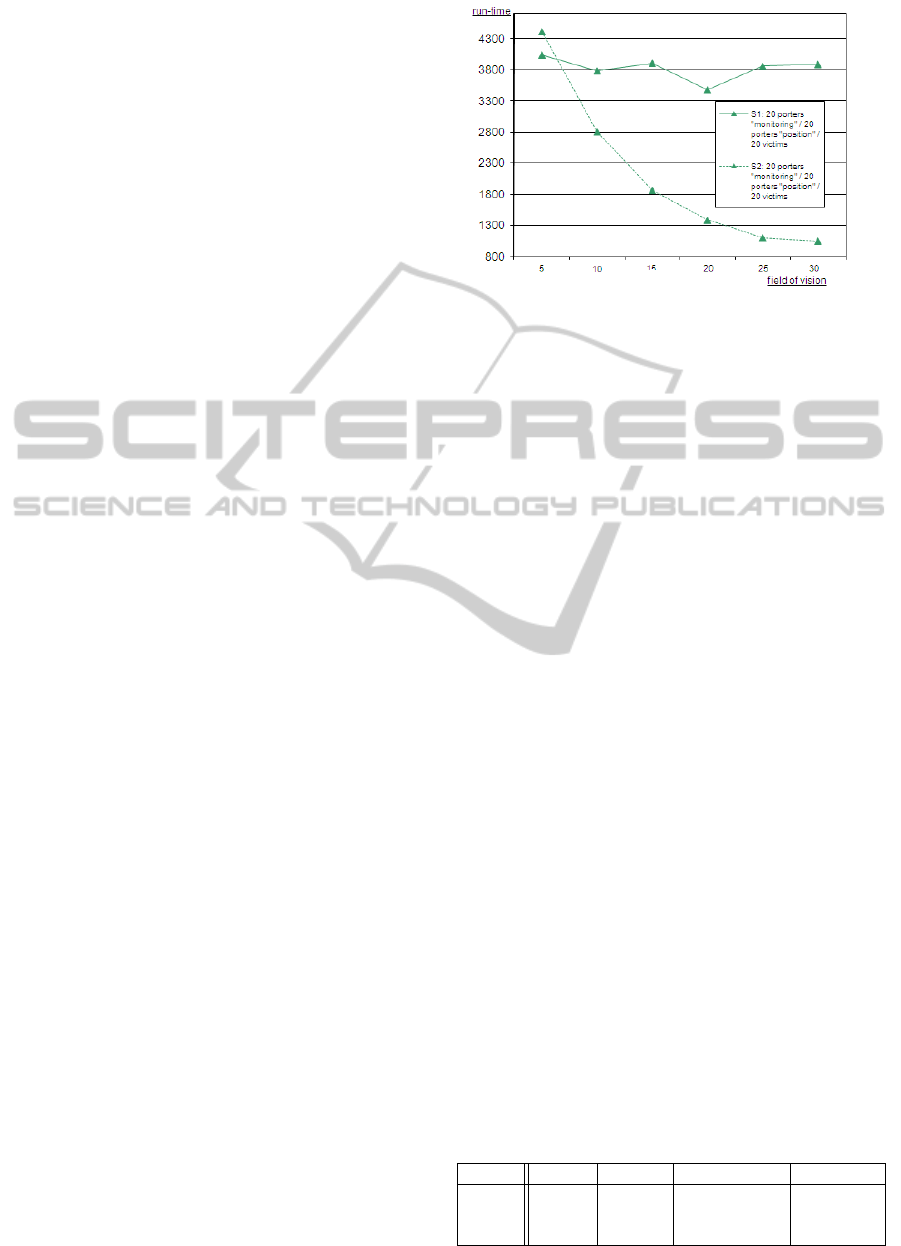
Figure 3 shows the result for the third experiment.
As we can see, the scenario S
2
is faster than the clas-
sical scenario S
1
, except for the lowest field of vision.
For a field of vision from 8 to 30, S
2
run-time curves
(dotted curves) are below S
1
run-time curves (solid
curves). The increase of the field of vision improves
the knowledge of the agents on the environment and
should improve their efficiency: the probability for an
agent to perceive victims and other agents increases.
This is true with the use of the environment in the sce-
nario S
2
, a larger field improves the efficiency of the
agents: as the field of vision increases from 5 to 30,
run-time decreases from around 4000s to 800s. But
with the classical activation process in the scenario
S
1
, the improvement of victim perception barely off-
sets the cost of local context analysis. We can observe
that in most cases, the cost of the context computing
in each agent is more expensive in terms of simula-
tion run-time than the cost of computing the context
Figure 3: Simulation run-time with the strategies S
1
and S
2
for the third group.
inside the environment. The results are similar for the
first and second group of experimentations.
Communication. In the following experimenta-
tion, we compare the use of broadcast and the use
of the environment for the communication. In these
tests, only the communication filters f
recept
and f
accept
of the scenario S
4
are evaluated and compared to the
broadcast of the scenario S
3
. The message exchange
to find partners has been instantiated:
• The agents send “request” messages. The agents
interested in these messages are those which are
close to the sender and have a different skill, if the
victim can be moved. In scenario S
3
, the message
is broadcasted to all the agents, while in S
4
, they
are managed by f
recept
.
• Those agents answer with either an accept or a
reject message through an addressed message. In
scenario S
3
, the message is sent to the agent via
point-to-point communication, while in S
4
, they
are managed by f
accept
.
Each data is an average on 50 simulations. Each
simulation is composed of 2000 steps. We have run
two series of simulations characterized by two param-
eters: number of agents and number of updates during
the simulation.
Firstly, we have tried to use the RETE algorithm to
implement the communication filter, and compared it
to the broadcast and addressed messaging capabilities
of MadKit. The following table sums up the simula-
tion run-time in function of the messaging implemen-
tation: EASI with a RETE tree, MadKit Messaging
support, ad hoc Environment and Broadcast.
Agent RETE Madkit Environment Broadcast
10 4624 1096 125 173
20 15215 4050 394 596
50 83785 26306 2377 4755
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE
ENVIRONMENT
133

These results show that the cost of a RETE tree off-
sets the gains in the message treatment. This discrep-
ancy with the previous results for activation can be
explained by the cost of the addition and removal of
the messages. In the activation part, the entities are
the same all along the simulation, and only rule firing
and description modifications take place.
This has lead us to use an ad hoc implementa-
tion of the environment for communication, which
treats the calculations in the same way as described
in section 4. However, the comparative results show
that the MadKit implementation of the broadcast and
addressed messaging is not efficient because of its
genericity. Therefore, we also re-implemented the
broadcast and point-to-point communications using
the same data structures as the environment, in order
to have a fair comparison between the environment
and the broadcast solutions.
In the following, we compare the two last solu-
tions. Firstly, we study the impact of a variation in the
number of agents. The results shown in Fig. 5 feature
10 to 100 agents. The curve shows a clear advan-
tage of the environment over the broadcast, and that
the more agents there are, the more EASI is compara-
tively interesting (from 27.8% for 10 agents to 53.9%
for 100 agents).
0
5000
10000
15000
20000
25000
30000
35000
0 10 20 30 40 50 60 70 80 90 100
Ag e nt s
Tim e (ms)
Environment
Broadcast
Figure 4: Comparative results of Broadcast and EASI in
function of the number of agents.
In the second phase (Fig. 5),we study the impact
of a variation in the number of updates, for 50 agents.
During each update, all the agents move and in the
case of the Environment implementation, they mod-
ify their description accordingly. The run-time gain
of EASI over broadcast gets from 50.7% for 20 up-
dates to 48.8% for 1000 updates. Therefore, the cost
of the update mechanism is not significant in compar-
ison with the difference in efficiency.
These experimentations show a clear advantage to
the environment over the broadcast, and this result is
backed up by the theoretical results. It shows the ef-
0
1000
2000
3000
4000
5000
6000
0 100 200 300 400 500 600 700 800 900 1000
Upd ates
Tim e (ms)
Broadcast
Environment
B minus E
Figure 5: Comparative results of Broadcast and EASI in
function of the number of description updates.
ficiency of the context computing inside the environ-
ment in comparison with the classical approach where
the context is computed in each agent.
6 DISCUSSION
AND CONCLUSIONS
In the EASI/EASS models, the environment offers a
technical support for communication and activation.
Its processing is the result of the filters triggering ac-
cording to the MAS descriptions. In that way, the
agents add or remove dynamically filters and update
their description. Thanks to the filter triggering, an
agent receives a message or is activated in a specific
context. The processing of the messages and the ac-
tion execution remain to the agents responsibility.
This paper is focused on the cost of the centraliza-
tion, which is closely related to the cost of the update
process. Organizations, such as the agent-group-role
model (Ferber et al., 2002) enable to decrease the cost
but do not take into account ambient criteria like the
location of the agents (e.g. in the simulation). Let us
note that our modeling enables to reproduce a selec-
tion of percepts according to the organisation. Insti-
tutions (see e.g. (Esteva et al., 2004)) generally do
not share the same objective. The focus is on control
and not on the filtering / matchmaking. However, the
technical solutions may be close to ours.
The use of a shared knowledge has already been
done within agents (for example Sycaras work, e.g.
(Sycara and Wong, 2000)) but in that case the up-
date of the properties is not considered. In this pa-
per, we focus on the cost of the update process that
could limit the interest to centralize specific informa-
tion. Furthermore, middle-agents are generally used
only as a first step to find contacts, and not to manage
all the communications. In our view, the environment
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
134

is a facility, which can be used to facilitate the inter-
action, apply norms, or verify some rules related to
the application design. These roles do not belong to
the same design level as the agents.
Theoretically, we have shown that if the commu-
nication takes the context into account, there is no
strictly dominant solution. It depends on the dynam-
icity of the multi-agent system, the number of agents
and the average percentage of agents interested in
each message. According to the number of tests cri-
teria, we have shown that the environment is always
better than the local context computation. According
to the number of messages criteria, the result has to
take into account the number of messages related to
the MAS activity and the number of messages related
to the update process. We have shown that the en-
vironment solution is generally better to mediate the
communication of the MAS activity and that few mes-
sages to mediate are needed to compensate the cost of
the update process.
To propose an empirical assessment of the cost of
the environment, we have studied the run-time crite-
rion in the crisis simulation example. We compare
the cost of the local context analysis for each agent
to a central and global control ensured by the envi-
ronment, and the cost of communication. The main
conclusion is that the environment cost is significantly
lower than the local agent calculation of the context
perception, except when there are very few agents.
In the future, we intend to investigate different
ways to improve the environment performance. An
ongoing effort concerns the theoretical evaluation of
a RETE-based instantiation of the model. We also
study how to take advantage of the filter and entity
structures to speed up the matching process.
REFERENCES
Badeig, F., Balbo, F., and Pinson, S. (2007). Contextual
activation for agent-based simulation. In ECMS’07,
pages 128–133.
Bousquet, F., Bakam, I., Proton, H., and Page, C. L. (1998).
Cormas: Common-pool resources and multi-agent
systems. In Pobil, A. P. D., Mira, J., and Ali, M., edi-
tors, IEA/AIE (Vol. 2), volume 1416 of Lecture Notes
in Computer Science, pages 826–837. Springer.
Branigan, H. (2006). Perspectives on multi-party dialogue.
Research on Language & Computation, 4 (2-3):153–
177.
Esteva, M., Rodriguez-Aguilar, J., Rosell, B., and Arcos,
J. (2004). Ameli: An agent-based middleware for
electronic institutions. In Jennings, R., Sierra, C.,
Sonenberg, L., and Tambe, M., editors, Proceedings
of the third International Joint Conference on Au-
tonomous Agents and Multi-Agent Systems (AAMAS
2004), pages 236–243. ACM Press.
Ferber, J., Gutknecht, O., Jonker, C., Muller, J., and Treur,
J. (2002). Organization models and behavioural re-
quirements specification for multi-agent systems.
Forgy, C. L. (1982). Rete : A fast algorithm for the many
pattern/many object pattern match problem. Artificial
Intelligence, 19:17–37.
Gutknecht, O. and Ferber, J. (2001). The madkit agent plat-
form architecture. In Revised Papers from the Inter-
national Workshop on Infrastructure for Multi-Agent
Systems, pages 48–55. Springer-Verlag.
Kesaniemi, J., Katasonov, A., and Terziyan, V. (2009). An
observation framework for multi-agent systems. Au-
tonomic and Autonomous Systems, International Con-
ference on, pages 336–341.
Laberge, D. (1975). learning and cognitive processes (Vol.
4), chapter 5 - Perceptual Learning and Attention,
pages 237–273. W.K. Estes.
Luke, S., Cioffi-Revilla, C., Panait, L., Sullivan, K., and
Balan, G. (2005). Mason: A multiagent simulation
environment. Simulation, 81(7):517–527.
Picco, G. P. and Buschini, M. L. (2002). Exploiting tran-
siently shared tuple spaces for location transparent
code mobility. In COORDINATION ’02: Proceedings
of the 5th International Conference on Coordination
Models and Languages, pages 258–273, London, UK.
Springer Verlag.
Platon, E., Sabouret, N., and Honiden, S. (2005). Over-
hearing and direct interactions: Point of view of an
active environment. In Proceedings of Environment
for Multi-Agent Systems, Workshop held at the Fourth
Joint Conference in Autonomous Agents and Multi-
Agent Systems, volume 3830 of Lecture Notes in Arti-
ficial Intelligence, pages 121–138. Springer Verlag.
Saunier, J. and Balbo, F. (2009). Regulated multi-party
communications and context awareness through the
environment. International Journal on Multi-Agent
and Grid Systems, 5(1):75–91.
Sycara, K. and Wong, H. (2000). A taxonomy of middle-
agents for the internet. In ICMAS ’00: Proceedings
of the Fourth International Conference on MultiAgent
Systems (ICMAS-2000), pages 465–466, Washington,
DC, USA. IEEE Computer Society.
Weiss, G., editor (1999). Multiagent Systems: A Modern
Approach to Distributed Artificial Intelligence. The
MIT Press, Cambridge, MA, USA.
Weyns, D., Omicini, A., and Odell, J. (2007). Environment
as a first-class abstraction in multiagent systems. Au-
tonomous Agents and Multi-Agent Systems, 14(1).
Weyns, D., Steegmans, E., and Holvoet, T. (2004). Towards
active perception in situated multi-agent systems. Spe-
cial Issue of Journal on Applied Artificial Intelligence,
18 (9-10):867–883.
EVALUATING THE COST OF SUPPORTING INTERACTION AND SIMULATION THROUGH THE
ENVIRONMENT
135
