
AUTOMATIC FACE RECOGNITION
Methods Improvement and Evaluation
Ladislav Lenc and Pavel Kr´al
Department of Computer Science and Engineering, University of West Bohemia, Plzeˇn, Czech Republic
Keywords:
Face recognition, Self organizing maps, Eigenfaces.
Abstract:
This paper deals with Automatic Face Recognition (AFR), which means automatic identification of a person
from a digital image. Our work focuses on an application for Czech News Agency that will facilitate to identify
a person in a large database of photographs. The main goal of this paper is to propose some modifications
and improvements of existing face recognition approaches and to evaluate their results. We assume that about
ten labelled images of every person are available. Three approaches are proposed: the first one, Average
Eigenfaces, is a modified Eigenfaces method; the second one, SOM with Gaussian mixture model, uses Self
Organizing Maps (SOMs) for image reduction in the parametrization step and a Gaussian Mixture Model
(GMM) for classification; and in the last one, Re-sampling with a Gaussian mixture model, several resize
filters are used for image parametrization and a GMM is also used for classification. All experiments are
realized using the ORL database. The recognition rate of the best proposed approach, SOM with Gaussian
mixture model, is about 97%, which outperforms the “classic” Eigenfaces, our baseline, by 27% in absolute
value.
1 INTRODUCTION
Automatic Face Recognition (AFR) consists of au-
tomatic identification of a person from a digital im-
age or from a video frame by a computer. It has
been the focus of many researchers during the past
few decades. AFR can be used in several applica-
tions: to facilitate access control to buildings; to sim-
plify the digital photo organization task; surveillance
of wanted persons; etc.
A huge amount of algorithms for face recogni-
tion were proposed. Most of them perform well un-
der certain “good” conditions (face images are well
aligned, the same pose and lighting conditions, etc.).
However, their performance is significantly degraded
when these conditions are not accomplished. Many
methods have been introduced to handle these limi-
tations, but none of them perform satisfactorily in a
fully uncontrolled environment. AFR thus still re-
mains an open issue under general conditions.
The main goal of this paper is to propose some
modifications and improvements of existing face
recognition approaches. We would like to adapt ex-
isting methods to some particularities of our facial
ORL corpus: 1) the number of training examples are
strongly limited. However, this number is greater than
one training example; 2) the face pose
1
and the face
size (see Figure 1) may vary; 3) lighting conditions of
the images can also differ; 4) the time of acquisition
differs
2
. The recognition accuracy of the proposed
approaches will be evaluated and compared using the
ORL face database.
The outcomes of this work are designed to be used
by the Czech News Agency (
ˇ
CTK) in the following
application.
ˇ
CTK owns a large database (about 2 mil-
lions) of photographs. A significant number of pho-
tos is manually annotated (i.e. the photo identity is
known). However, other photos are unlabelled; the
identities are thus unknown. The main task of our
application consists of the automatic labelling of the
unlabelled photos. This application must also han-
dle cases when one new photograph is added into the
database (automatic labelling of this picture). The
system must also guarantee the cases when the image
is not well aligned and its pose varies. Note that we
assume that about ten labelled images of every person
are available.
This paper is organized as follows. The next sec-
tion presents a short review of automatic face recog-
1
It means the face orientation to the camera
2
The images are taken in the interval of 2 years.
604
Lenc L. and Král P..
AUTOMATIC FACE RECOGNITION - Methods Improvement and Evaluation.
DOI: 10.5220/0003182206040608
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 604-608
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

nition. Section 3 describes the different methods we
propose. Section 4 gives experimental results of our
methods. In the last section, we discuss the research
results and we propose some future research direc-
tions.
2 SHORT REVIEW OF FACE
RECOGNITION APPROACHES
Early face recognition approaches were based on
normalized error measures between significant face
points. One of the first method was designed by Bled-
soe (Bledsoe, 1966). Coordinates of important face
points were manually labelled and stored in the com-
puter. The feature vector was composed of the dis-
tances between these points. Vectors were classified
by the Nearest Neighbour rule. The main drawback
of such methods is the need of manually labelling of
important face points. On the other hand, variations
of the face pose, lighting conditions and other factors
can be handled due to this manual marking. Another
fully automatic method using similar measurements
was designed by Kanade (Kanade, 1977). In this case,
the labelling of important face points is automatic.
One of the first successful approaches is Prin-
cipal Component Analysis (PCA), so called Eigen-
faces (Turk and Pentland, 1991). Eigenfaces is a sta-
tistical method that takes into account the whole im-
age as a vector. Image vectors are put together and
create a matrix. Eigenvectors of this matrix are cal-
culated. Face images can then be expressed as a lin-
ear combination of these vectors. Each image is rep-
resented as a set of weights for corresponding vec-
tors. Eigenfaces perform very well when images are
well aligned and have approximately the same pose.
Changing lighting conditions, pose variations, scale
variations and other dissimilarities between images
decrease the recognition rate rapidly (Sirovich and
Kirby, 1987).
Another group of approaches use Neural Net-
works (NNs). Several NNs topologieswere proposed.
One of the best performing methods based on neu-
ral networks is presented in (Lawrence et al., 1997).
Image is first sampled into a set of vectors. Vectors
created from all labelled images are used as a train-
ing set for a Self Organizing Map (SOM). Image vec-
tors of the recognized face are used as an input of the
trained SOM. Output of the SOM is then used as an
input of the classification step, which is a convolu-
tional network. This network has a few layers and
ensures some amount of invariance to face pose and
scale.
A frequently discussed type of face recognition
algorithms is elastic bunch graph matching (Wiskott
et al., 1999; Bolme, 2003). This algorithm is based
on Gabor Wavelet filtering. Feature vectors are cre-
ated from Gabor filter responses as significant points
in the face image. Bunch graph is created and is
consequently matched against the presented images.
Another method which utilizes Gabor wavelets is the
method proposedby Kepenekci in (Kepenekci, 2001).
It uses wavelets in a different manner. Fiducial points
are not fixed. Their locations are assumed to be at the
maxima of Gabor filter responses. The main advan-
tage of Gabor wavelets is some amount of invariance
to lighting conditions.
3 METHODS DESCRIPTION
3.1 Average Eigenfaces
A classic Eigenfaces approach uses only one training
image. Our contribution is to adapt this method for
the case of more training examples being available.
We create one reference example from all training im-
age samples. In this preliminary study, we compute
from all training examples an average value of the in-
tensity at each pixel. These images are used for prin-
cipal component analysis.
3.2 SOM with a Gaussian Mixture
Model
Current face recognition methods are composed
of two steps: parametrization and classification.
Parametrization is used to reduce the size of the origi-
nal image with the minimal loss of discriminating in-
formation. The parametrized image is then used for
classification step instead of the original one.
We use self organizing maps in the parametriza-
tion step in order to reduce the size of the feature
vectors. The second step is a classification by the
Gaussian mixture model. The use of the SOM in the
parametrization is motivated by the work proposed
in (Lawrence et al., 1997). Authors use also SOMs
in the first step, while the classification model differs.
3.2.1 Parametrization with a SOM
Input images are represented as two dimensional ar-
rays of pixel intensities. We consider grayscale pic-
tures where each pixel is represented by a single in-
tensity value. Each image can be also seen as a sin-
gle dimensional vector of size w ∗ h, where w and h
are image width and height, respectively. For the di-
mension reduction a self organizing map is used. The
AUTOMATIC FACE RECOGNITION - Methods Improvement and Evaluation
605

image is first sampled and a set of vectors is created
by the following way. A rectangular sliding window
is used.
The sampling procedure uses a rectangular sliding
window which scans over the image. At each posi-
tion, a vector containing intensity values of pixels, is
created. The size of the created vector is l = ww∗wh,
where ww an wh are window width and height, re-
spectively. The vectors obtained from all images are
used as a training set for self organizing map. The
trained SOM (standard SOM training algorithm) is
then used for image parametrization. Each input vec-
tor is associated with the closest node of the SOM and
its position is used to compute the resulting parameter
vector. Values of this vector are created as an average
value of the node vector associated with this position.
The vectors are used as an input for the classification
step.
3.2.2 Classification with a GMM
Let us call F the set of featuresfor one image obtained
in the parametrization step, let I be the face image.
We use a GMM classifier that computes P(F|I). The
recognized image is then:
ˆ
I = argmax
C
P(I|F) = argmax
C
P(F|I)P(I) (1)
We assume all images to be equiprobable. The prior
probability P(I) can be thus removed from the equa-
tion.
3.3 Re-sampling with a Gaussian
Mixture Model
An alternative way to reduce the feature space is im-
age re-sampling. Image size is reduced using the re-
size filters from ImageMagick library
2
. Intensity val-
ues of the resulting images are directly used as image
vectors. These vectors are classified by a GMM in the
same way as in the previous case.
Different resize filters and the different sizes of
the resulting output vectors are evaluated. The four
ones are interpolated filters, while the last one, Cubic
filter, is a Gaussian filter. The first method, a Point
filter, determines the closest point in the original im-
age to the new pixels position and uses its intensity
value in the resized image. The Box filter computes
an average value of the pixels placed in the ”box” (a
rectangular window of a defined size). The next eval-
uated filter a Triangle filter. This filter takes into ac-
count the distances of the pixels and uses a weighted
average instead of just an average value. Hermite fil-
ter has similar results as the triangle filter, but pro-
duces a smoother round off in large scale enlarge-
ments. More information about resize filters is avail-
able at ImageMagick website
2
.
4 EXPERIMENTAL SETUP
4.1 Corpus
The ORL database which was created in AT & T
Laboratories
1
is used to evaluate the proposed ap-
proaches. The pictures of 40 individuals were taken
between April 1992 and April 1994. For each per-
son 10 pictures are available. Every picture contains
just one face. They may vary due to three follow-
ing factors: 1) time of acquisition; 2) head size and
pose; 3) lighting conditions. The images have black
homogeneous background. The size of pictures is
92 × 112 pixels. Further description of this database
is in(Gross, 2005). Figure 1 shows two examples of
one individual.
All experiments except the classic Eigenfaces
approach are realized using a cross-validation pro-
cedure, where 10% of the corpus is reserved for the
test, and another 10% for the development set.
Figure 1: An example of faces from ORL database
4.2 Experiments
We chose a “classic” Eigenfaces as a baseline for
our experiments. A slightly modified cross-validation
procedure is used in this case. 10% of the corpus is
still reserved for the test. However for the training,
we use only one example from the training pool. All
training examplesare subsequently used. Recognition
error rate of this approach is shown in the first section
of Table 1.
4.2.1 Average Eigenfaces
For creation of the average images ten images of each
person are used. The second section of Table 1 shows
1
http://www.cl.cam.ac.uk/research/dtg/attarchive/
facedatabase.html
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
606
the recognition error rate of this approach. Unfor-
tunately, the error rate of the proposed approach is
higher than the baseline. It is probably due to the
computation of an average of the image factors in the
ORL database (see Section 4.1). We assume that the
recognition rate will be better when the above men-
tioned factors are closer.
4.2.2 Parametrization with a SOM
Original images in ORL database have a size of
92× 112 pixels. A square window of dimension 5× 5
is used for image sampling. This window is moved
by 4 pixels, the overlap is thus 1 pixel. In the sam-
pling step 644 vectors of the size of 25 are created
for every image. These vectors are used to train the
two dimensional self organizing map. Then vectors
from each image are classified by the trained SOM.
For every vector a resulting value is determined as an
average value of the closest node vector. Therefore,
a vector of the size of 644 is created for every image.
These vectors are classified by a GMM with 2 Gaus-
sian mixtures.
The third section of Table 1 shows the recogni-
tion error rate of some sizes of the SOM. Several
SOM topologies are evaluated. However, only the
four best ones are reported in this table. All recogni-
tion scores are very high and outperform significantly
all previously described approaches. The recognition
error rate is reduced to 3.75%. This table also shows
that the size of the SOM is an important clue for face
recognition.
Table 1: Automatic face recognition error rate for different
parametrization/classifications methods.
Method Error rate
1. Eigenfaces 30.85
2. Average Eigenfaces 53.88
3. SOM & GMM
SOM size Error rate
8x8 4,5
10x10 3,75
12x12 3,25
14x14 3,75
Two level Dimension Reduction. In this experiment,
we would like to evaluate the relation between the re-
duction of the parametrized input vector and the loss
of the recognition accuracy. This means to determine
the minimal feature vector without a significant de-
crease of the performance of our system.
Another SOM is used for this additional vector
reduction in a similar way as in the previous case.
Several SOM topologies are also evaluated. Table 2
shows the recognition rate of this experiment. The re-
sults are not as good as in the previous case, but still
significantly better than our baseline. The best recog-
nition rate is obtained with the SOM topology 10×10
neurons with a vector size 42.
Table 2: Error rates for for two level dimension reduction
with different SOM sizes.
1 level 1 SOM size 2 level SOM size Error rate
10x10 8x8 14,25
12x12 10x10 10,25
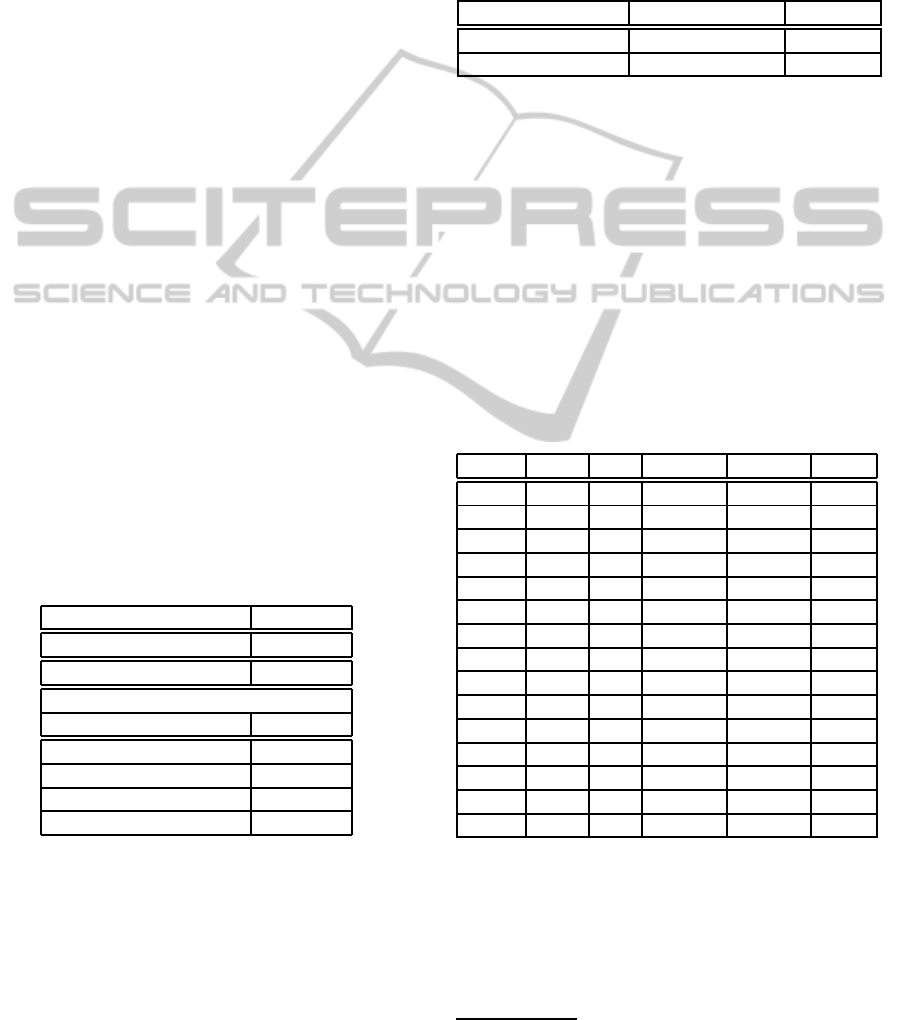
4.2.3 Parametrization by Re-sampling
Table 3 shows recognition rates for different filters
and different image sizes. This table shows that all
filters are almost comparable except the Point filter.
The worst recognition score of this filter is probably
due to its simplicity. Moreover, the best recognition
rate is obtained by the vector of size of 8× 8. We can
conclude that the recognition accuracy of this experi-
ment is close to the previous one with one level SOM
parametrization.
Table 3: Comparison of the recognition error rate of differ-
ent resize filters and different parametrized vector size with
a GMM classifier
Filter Point Box Triangle Hermite Cubic
2x3 55 40 39,75 38 40,75
3x4 44,75 13,5 16 14 17,75
5x6 20,75 6,25 5 5,25 6,5
6x7 18,5 3,25 3 3 4
7x8 12,5 3,25 3,25 4,5 4
8x10 7,75 2,25 3 2,75 2,5
9x11 5 2,5 2,75 2,75 2,75
10x12 5,25 3 2,75 3,5 3
11x13 5,25 3 3 3,25 3,5
13x16 3,75 3,25 3,5 4 3,75
15x18 3,75 3,75 3,5 4 3,5
17x21 4 4 3,75 4,5 3,75
19x23 4 4,5 4,75 4,25 4,5
21x26 4 3,75 3,75 4 3,75
23x28 4,25 4,5 4,25 4,75 3,75
5 CONCLUSIONS
In this paper, three methods for automatic face recog-
nition are proposed. The recognition accuracy is eval-
uated on the ORL database. Experiments show that
2
http://www.imagemagick.org/Usage/resize/
AUTOMATIC FACE RECOGNITION - Methods Improvement and Evaluation
607

the first approach, an Average Eigenfaces, does not
perform well and it is thus not a good further re-
search direction. However,the two other proposed ap-
proaches, namely SOM with Gaussian mixture model
and Resampling with a Gaussian mixture model, have
very good recognition accuracy. Their recognition er-
ror rate is close to 3%, which outperforms the “clas-
sic” eigenfaces, our baseline, by 27% in absolute
value. Moreover, these scores are also slightly higher
than those reported in (Lawrence et al., 1997) and
in (Kepenekci, 2001). The authors use also ORL
database but different approaches.
The first perspective consists of the evaluation of
the proposed methods on larger corpora (i.e. the
ˇ
CTK
database). We would like also to use another classi-
fier such as Dynamic Bayesian Networks. The last
perspective consists of the combination of classifiers
in order to improve the recognition accuracy of the
separate models.
ACKNOWLEDGEMENTS
This work has been partly supported by the Ministry
of Education, Youth and Sports of Czech Republic
grant (NPV II-2C06009).
REFERENCES
Bledsoe, W. W. (1966). Man-machine facial recognition.
Technical report, Panoramic Research Inc., Palo Alto,
CA.
Bolme, D. S. (2003). Elastic Bunch Graph Matching. PhD
thesis, Colorado State University.
Gross, R. (2005). Face Databases. Springer-Verlag.
Kanade, T. (1977). Computer recognition of human faces.
Birkhauser Verlag.
Kepenekci, B. (2001). Face Recognition Using Gabor
Wavelet Transform. PhD thesis, The Middle East
Technical University.
Lawrence, S., Giles, S., Tsoi, A., and Back, A. (1997).
Face recognition: A convolutional neural network ap-
proach. IEEE Trans. on Neural Networks.
Sirovich, L. and Kirby, M. (1987). Low-dimensional proce-
dure for the characterization of human faces. Journal
of the Optical Society of America, 4.
Turk, M. A. and Pentland, A. P. (1991). Face recognition us-
ing eigenfaces. Computer Vision and Pattern Recog-
nition.
Wiskott, L., Fellous, J.-M., Kr¨uger, N., and von der Mals-
burg, C. (1999). Face recognition by elastic bunch
graph matching. Intelligent Biometric Techniques in
Fingerprint and Face Recognition.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
608
