ON SPEECH RECOGNITION PERFORMANCE UNDER
NON-STATIONARY ECHO CANCELLATION
Mahdi Triki
Philips Research Laboratories, Eindhoven, The Netherlands
Keywords:
Acoustic echo cancellation, Acoustic echo suppression, Non-stationary environment, Automatic speech recog-
nition, Speech enhancement.
Abstract:
During the last decades, performance of speech recognizers significantly increased for large vocabulary tasks
and adverse environments. To reduce interference, acoustic echo cancellation has been proposed and exten-
sively investigated. Particular attention was paid to the convergence proprieties and the capability to handle
double talk. However, in time-varying environment, the echo canceller has the additional task to track the vari-
ations of the propagation channel. With this respect, it has been established that algorithms that exhibit fast
convergence do not provide necessarily good tracking performances. In such an environment, performance
assessment is also challenging and the ‘experiment’ design is crucial to provide consistent and interpretable
results. In the present paper, we reproduce time-varying artifacts by altering the surrounding acoustic en-
vironment (using a moving person/robot). The movement characteristics (discrete/continuous) and location
(line-of-sight/background) emphasizes different room/algorithms characteristics and provides deeper insights
on the system behavior.
1 INTRODUCTION
During the last three decades, performance of speech
recognizers significantly increased even for large vo-
cabulary tasks (X. Huang and Hon, 2001). The upper-
bound performances of recognizers are generally
achieved when a close-talk microphone is recording
the speech signal, i.e., when no competing speaker,
noise sources and/or reverberation affect the origi-
nal clean speech signal. Many desired settings may
require the speaker to be either far from the micro-
phones or surrounded by one or many noise sources,
or both. Indeed, for many applications, close-talk
recordings (headset solutions) are not desired for aes-
thetic and/or convenience reasons; while in various
environments (e.g. in living-room, car, hospital), sur-
rounding noise cannot be neglected. In these situ-
ations, speech recognizers dramatically fail to reach
the minimal threshold of performance that the usabil-
ity is requiring, even with a small vocabulary size.
Often, prior information about the nuisance
sources (e.g. radio, background music) is available.
These information could be exploited to alleviate
noise, enhance the desired source, and increase the
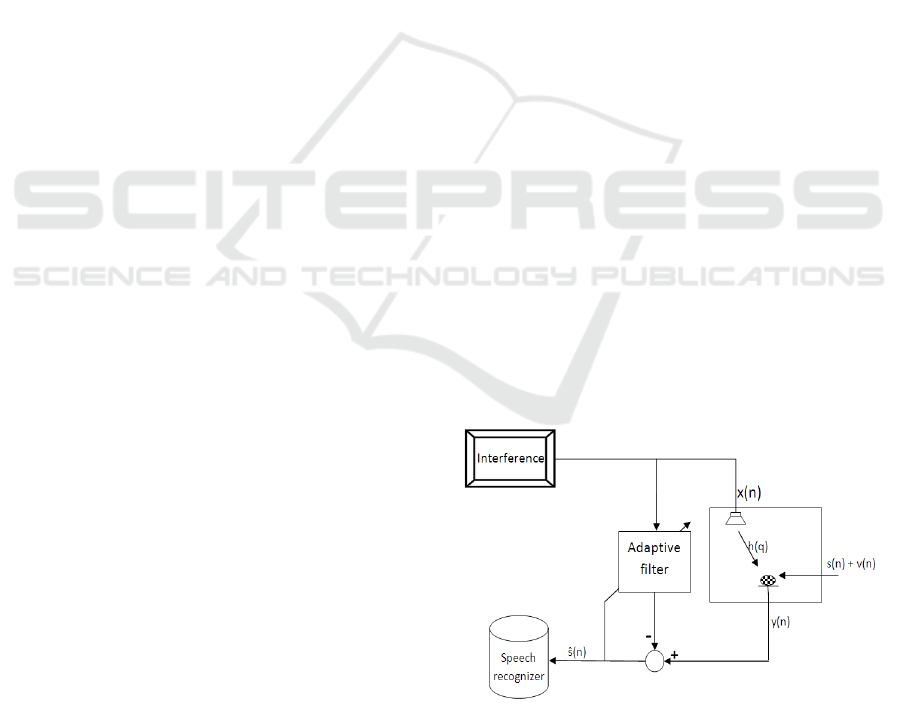
recognition accuracy. Typically, the interference is
predicted (using an appropriate adaptive processing),
Figure 1: AEC: problem statement.
then subtracted from the received signal (as illustrated
in Figure 1).
The enhancement scheme is referred to as Acous-
tic Echo Cancellation (AEC). AEC was extensively
investigated for both enhancement (J. Benesty and
Gay, 2001) and recognition (J. Picone and Hartwell,
1988) applications. The reported results assume gen-
erally the coupling between the interfering source and
the received echo (the propagation channel) station-
ary. In reality however, this coupling may be time-
varying due to the movement of the desired speaker,
316
Triki M..
ON SPEECH RECOGNITION PERFORMANCE UNDER NON-STATIONARY ECHO CANCELLATION.
DOI: 10.5220/0003182903160321
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 316-321
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

other persons present in the same room, or due to the
variations of physical parameters (e.g. temperature).
In such a case, the adaptive processing will have the
additional task of tracking the variation of the prop-
agation channel. With this respect, it has been es-
tablished that adaptive algorithms that exhibit good
convergence properties in stationary environments do
not necessarily provide good tracking performance
in a non-stationary environment; because the conver-
gence behavior of an adaptive filter is a transient phe-
nomenon, whereas the tracking behavior is a steady-
state property (Haykin, 2002; Triki, 2009).
In this paper, we address some issues related to
the performance evaluation of echo-cancellation in
time-varying environments. Generally, experimen-
tal evaluation should produce meaningful, consistent
and interpretable results. In time-varying environ-
ments, the assessment is particularly challenging and
the ‘experiment’ design is crucial. On one hand, mim-
icking the user experience (moving user/capturing-
device) is difficult to reproduce and to interpret. On
the other hand, simulating the impulse responses
offers flexibility and reproducibility, but gives re-
sults that are difficult to interpolate to real-world en-
vironment. Alternatively, we reproduce the time-
varying artifacts by altering the surrounding acous-
tic environment (while keeping the source and cap-
turing devices fixed). These alterations are intro-
duced by moving person/robot. The movement char-
acteristics (discrete/continuous) and location (line-of-
sight/background) represent degrees of freedom that
emphasis various room/algorithms characteristics and
provide deeper insights on the system behavior.
The remainder of this paper is organized as fol-
lows. In section 2, the experimental setup used for
the data acquisition and performance analysis is de-
scribed. Acoustic echo cancellation and noise sup-
pression building blocks are investigated in sections 3
and 4 respectively. Finally, a discussion and conclud-
ing remarks are provided in section 5.
2 EXPERIMENTAL SETUP
Throughout this paper, we evaluate different speech
preprocessing schemes in order to isolate their per-
formance impact on the recognition rate and motivate
further refinements. In the following, we present our
experimental setup to assist this progressive unfolding
of the speech preprocessing design. Namely, we will
describe the data collection procedure, and specify the
characteristics of our data recording space (reproduc-
ing a living-room environment).
2.1 Data Collection
Defining a formal data collection process is necessary,
as it ensures that gathered data is both defined and ac-
curate and that subsequent findings and decisions are
valid. The aim of the present work is to investigate
the effect of the extrinsic variabilities (noise, rever-
beration, interference) on the recognition rate. Thus,
the data should be collected such to reduce the effect
of intrinsic variabilities (that may bias the final con-
clusions). Specifically, particular attention was paid
to:
• Linguistic accent: we have chosen North Ameri-
can native speakers (American or Canadian). The
choice was motivated by the fact that our recog-
nition system (that we use for the evaluation) was
trained (optimized) for this particular accent.
• Speech rate changes: the variation of the speech
rate was alleviated with a two step simulation
approach: first we collect the input data, next
the various tasks are reproduced using a dummy-
head.
• Additive noise: the data collection was performed
in a noise-free and low-reverberent environment.
North-American native speakers (4 males, 1 female)
were asked to participate in the data collection pro-
cess. Two dictionaries were defined:
• Controls dictionary, e.g., ‘switch on’, ‘is there any
sport program tonight’.
• Artist names dictionary, e.g., ‘Madonna’, ‘Tokio
Hotel’, ‘Laura Pausini’...
The recordings were performed in a noise-free and
low-reverberant room (see Figure 2). The speakers
were seated in a comfortable chair while they read
aloud one-by-one a list of items. The items were dis-
played using a PowerPoint presentation at constant
speed (12 items per minute). The speech signal was
captured at 48 kHz.
2.2 Data Recording
We have investigated the recognition accuracy in a
living-room environment. The recordings were car-
ried out in a four-by-six meters demonstration room.
(see Figure 3 and Figure 5 for schematic representa-
tion). The room reverberation time is T
60
≈ 300 ms.
In order to account for speech rate variabilities,
the control/search commands (recorded during the
data collection phase) were reproduced by a KE-
MAR (Knowles Electronics Manikin for Acoustic Re-
search). The KEMAR was placed at 3 meters dis-
tance from the TV set. The audio signal was captured
ON SPEECH RECOGNITION PERFORMANCE UNDER NON-STATIONARY ECHO CANCELLATION
317

Figure 2: Data collection room.
Figure 3: Recording room.
by an omnidirectional microphone. The signal was
recorded at 48 kHz, then downsampled to 8 kHz (to
meet the specifications of the speech recognition en-
gine). The omnidirectional microphone was placed at
30 cm distance from the KEMAR loudspeaker. Dur-
ing the recordings, CNN channel was turned on (the
average Signal-to-Interference-Ratio (SIR) was about
10 dB). The North-American accent of CNN speakers
makes the TV interference further challenging.
3 ACOUSTIC ECHO
CANCELLATION FOR ASR
Acoustic echo arises when an interfering sound (here
produced by a TV) is picked up by a microphone,
together with its sound wave reflection into the sur-
rounding walls and objects. Usually, the received
signal is decomposed into direct sound, reflections
that arrives shortly after the direct sound (commonly
called early reflections), and reflections that arrive af-
ter the early reverberation (called late reverberation
and often approximated as white, diffuse, exponen-
tially decaying additive noise) (Habets, 2007). Sev-
eral adaptive schemes were proposed to estimate the
room reverberation and compensate for the interfer-
ing TV echo. Among them, the class of the Recur-
sive Least-Squares (RLS) algorithms (Haykin, 2002)
(and their frequency domain implementation (Shynk,
1992)) have shown to exhibit a fast convergence, and
reduced sensitivity to the color of the input signal.
Motivated by the application requirements (fast con-
vergence) and the input characteristics (speech con-
tent), an RLS real-time solution was implemented to
update the echo-canceller scheme, and used to reduce
the interference (TV signal) prior to recognition.
We first consider a stationary (time-invariant) en-
vironment. In such configuration, the echo-paths do
not change, and only the steady-state convergence of
the AEC is focal. For recognition performance analy-
sis, we distinguish the substitution, insertion and dele-
tion error rates, defined as:
substitute =
#substituted commands
#total commands
inserte =
#inserted commands
#total commands
delete =
#deleted commands
#total commands
where # denotes the cardinality operator. Intuitively,
insertion and deletion errors refer respectivelyto false
positive and false negative detection errors, while a
substitution occurs when a command is well detected
but misrecognized. The recognition was performed
using a Philips Speech Recognition system. The mod-
els used by the engine were trained with US-English
speech data.
Figure 4 illustrates the recognition accuracy as a
function of the order(length) of the FIR echo can-
celler. We observe that without echo-cancellation
(L = 0), the recognition system do not reach the us-
ability threshold. Moreover, the recognition perfor-
mance increases with the AEC length: the longer the
AEC, the better the echo-path modeling, and the fur-
ther the echo is suppressed. However for AEC length
( L > 1024 ), only minor additional gain was observed
(particularly for ‘substitute’ and ‘delete’ measures ):
in this region, modeling errors are small compared to
estimation and adaptation errors.
Next, we investigate non-stationary (time-varying)
scenarios. We have defined and compared the recog-
nition accuracy in four settings:
• No-mvt: no interferent person (stationary propa-
gation)
• Back-mvt: an interferent person continuously
moving on the background region (Fig 5.(a)). In
such scenario, the direct sound and early reverber-
ation are still time-invariant, only late reverbera-
tion varies.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
318
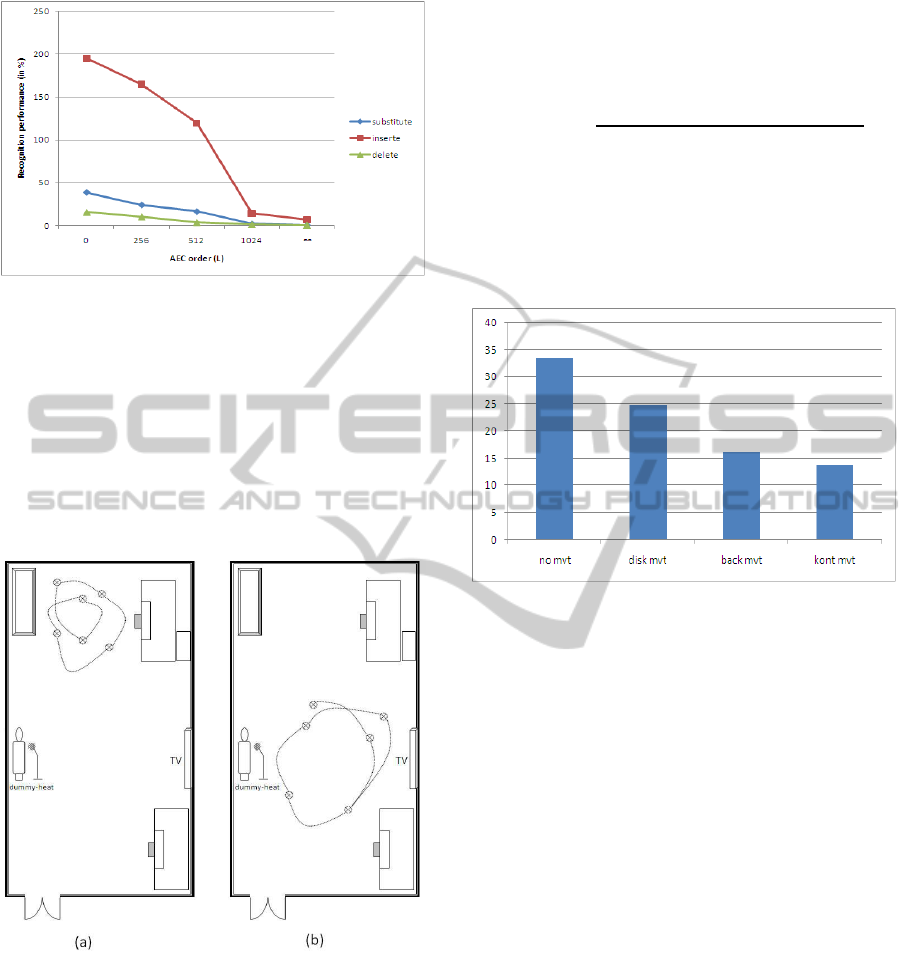
Figure 4: Recognition performances (in %) for processed
(echo-cancelled) signal function of the AEC order (L).
• Kont-mvt: an interferent person is continuously
moving on line-of-sight region (Fig 5.(b)). Thus,
all the room reverberation components (direct,
early, and late) are varying.
• Disk-mvt: an interferent person is moving on the
line-of-side region in a discrete fashion (step -
‘immobile’ 5 seconds - step ...).
Figure 5: Recording scenarios for AEC tracking analysis.
In these scenarios,the echo-paths are altered by the
presence of an external disturbance (moving persons).
However, equivalent artifacts may occur when the po-
sition of the source (desired speaker) or the capturing
microphone varies. The predefined scenarios have a
double advantage. First, they are simple to simulate
and reproduce. Second, they decorrelate the effects of
the variation of early vs. late reverberation, as well as
the convergence vs. tracking capabilities of the AEC
solutions.
As the insertion errors could be handled to some
extend, for instance, by a ‘press-to-speak’ button, we
limit our attention to the substitution and the deletion
errors and we define the recognition error rate as:
RER =
#substituted + deleted commands
#total commands
= substitute + delete
Figure 6 compares the recognition error rate gain, i.e,
RER
Gain
= RER
noisy signal
− RER
with AEC
computed for the four previously described scenarios.
Figure 6: RER
Gain
(in %) for the different non-stationary
scenarios.
One may notice that despite the RLS algo-
rithm has a relatively good steady-state performance
(scenario ‘No-mvt’) and rapid convergence (sce-
nario ‘Disk-mvt’), its tracking capabilities (scenarios
‘Back-mvt’ and ‘Kont-mvt’) is not sufficient to cap-
ture continuous variations of the propagation chan-
nel. To alleviate this problem, spectral-based post-
processing is proposed and investigated in the follow-
ing section.
4 ACOUSTIC ECHO AND NOISE
SUPPRESSION FOR ASR
We have observed that using solely adaptive FIR fil-
ters to perform echo cancellation would require a
large number of coefficients. This results in large
memory requirements and large convergence time.
Moreover, perfect tracking of the non-stationarities
in the propagation channel is problematic. Thus, ad-
ditional measures have to be taken to guarantee ro-
bustness. In communication systems, spectral post-
processing has been proposed at the AEC output. The
basic idea is to estimate the amplitude spectrum of the
desired signal and combine it with the phase available
ON SPEECH RECOGNITION PERFORMANCE UNDER NON-STATIONARY ECHO CANCELLATION
319
from the degraded signal for reconstructing the en-
hanced signal. In practice, a time-varying gain filter is
designed to reconstruct the desired signal. A number
of well-known gain functions G
n
( f) can be formu-
lated as (Etter and Moschytz, 1994; Tashev, 2006):
G
n
( f) =
(
h
1− γ
|R
n
( f)|
|Y
n
( f)|
α
i
β
if γ
|R
n
( f)|
|Y
n
( f)|
α
< 1
0 otherwise
(1)
where Y
n
and R
n
denote the amplitude spectrum of the
receivedand the remaining noise signals. The remain-
ing noise signal originates both from the remaining
interference (after echo cancellation) and the ambient
noise. These approaches have been relatively success-
ful due to their implementation simplicity and their
robustness against non-ideal circumstances. They
were extensively investigated and optimized for com-
munication systems. Particularly, it has been shown
that oversubtraction(γ> 1), smoothing the gain factor
G
n
, and constraining the gain minimum (i.e. G
n
( f) =
min(G
min
,G
n
( f)) enhances the audio quality and re-
duces the musical noise (M. Berouti and Makhoul,
1979).
However, it is well established that increasing the
audio quality does not lead necessarily to a better
recognition rate. Indeed, recognizers hinge criti-
cally (only) on spectral information. Any process-
ing leading to spectral distortion (especially time-
varying coloration) may seriously affect their perfor-
mance. Moreover as features extraction is performed
in the log spectral domain, computational stability
issues may arise (e.g. log(x) / x → 0), which is
not always well handled with commercial recogni-
tion engines. Thus, the oversubtraction factor γ set
a tradeoff between noise/interference reduction and
stationary spectral distortion, while the gain dynam-
ics (via the choice of G
min
) leads to a compromise be-
tween the noise/interference tracking capability and
dynamic spectral distortion.
We have implemented three post-processing
methods:
1) spectral magnitude subtraction (α = 1,β = 1).
2) minimum mean square error (MMSE) estimation
(α = 2, β = 1).
3) MMSE estimation in the log-spectral domain
(Ephraim and Malah, 1985).
We have compared the recognition performances af-
ter the post-processing for the four tracking scenar-
ios described in Section 3 (‘No mvt’, ‘Back mvt’,
‘Kont mvt’, ‘Disk mvt’). None of the post-processing
schemes consistently outperforms the others. In the
following, we will limit our attention to the spectral
magnitude subtraction technique as it is easier to im-
plement and to interpret.
Next, we focus on the effect of the gain dynamic
on the recognition accuracy. In communication sys-
tems, it has been noticed that noise suppressors suffer
from the rapid fluctuation of the SNR both in time
and frequency domains. It has been shown that re-
ducing the gain dynamic (by introducing a minimum
gain constraint, i.e., G
n
( f) = min(G
min
,G
n
( f))) re-
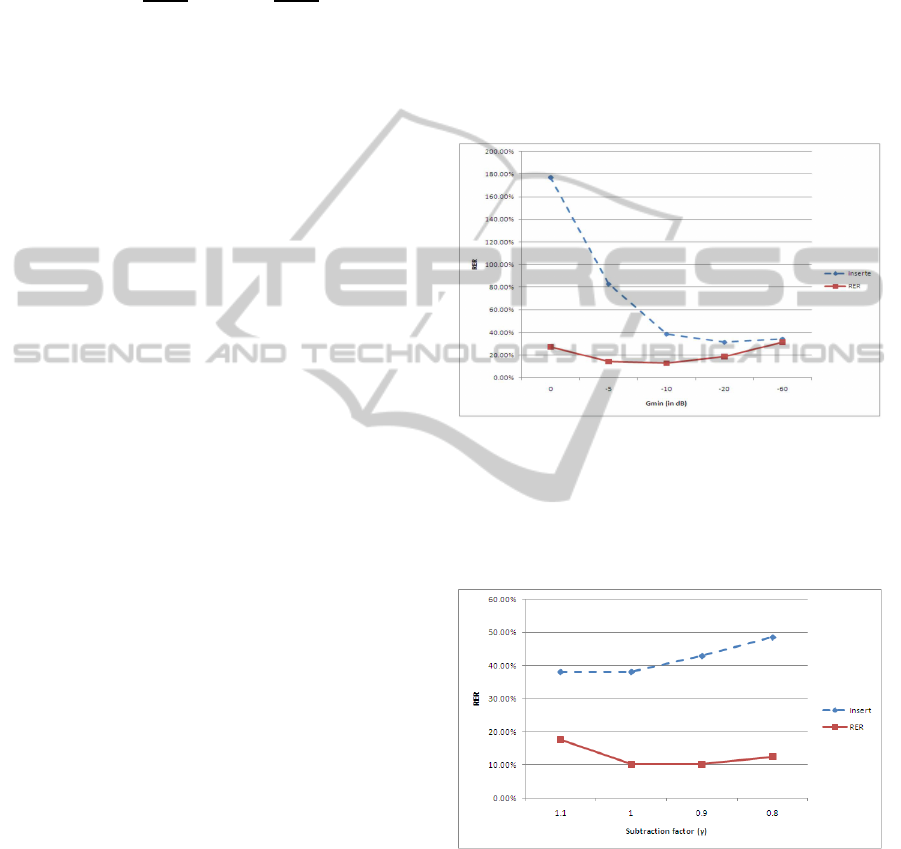
duces auditory artifacts. For speech recognition, our
experiments show that imposing a minimum gain con-
straint is also required. The recognition error rate and
the insertion error rate function of the minimum gain
G
min
are plotted (‘kont mvt’ scenario) in Figure 7. No
oversubtraction was performed (i.e. γ = 1)
Figure 7: Insertion and Recognition Error Rate function of
the minimum gain G
min
(in dB), for the ‘kont mvt’ scenario.
Finally, we investigate the effect of the subtraction
factor γ. In communication systems, it was shown that
oversubtraction γ > 1 improves the audio quality. We
Figure 8: Insertion and Recognition Error Rate function of
the subtraction factor γ, for the ‘kont mvt’ scenario.
observe (in Figure 8) that oversubtraction improves
the insertion at the expense of recognition error rates,
as it allows for further noise subtraction. On the de-
tection region, undersubtraction seems advantageous
as it allows for less spectral distortions.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
320

5 CONCLUDING REMARKS
In the present paper, we have investigated the per-
formance of echo-cancellation for voice control de-
vices operating in non-stationary propagation condi-
tions. Four distinct scenarios have been defined and
analyzed. In addition to be simple to simulate and
to reproduce, these scenarios decouple the effect of
early vs. late reverberation as well as the conver-
gence vs. tracking capabilities of the AEC solutions.
This provides additional insights on reverberation ar-
tifacts/effects, and allows better design of the adaptive
schemes.
Our experimental investigation has confirmed that
AEC systems that exhibit good convergence proper-
ties in stationary environment do not necessarily pro-
vide good tracking performance in non-stationary en-
vironment. We have also shown that spectral sub-
traction based post-processing may alleviate non-
stationary reverberations. Moreover, particular atten-
tion should be paid to limit the gain dynamics and to
the subtraction factor selection.
REFERENCES
Ephraim, Y. and Malah, D. (1985). Speech enhancement
using a minimum mean-square error log-spectral am-
plitude estimator. IEEE Trans. on Acoustic, Speech
and Signal Processing.
Etter, W. and Moschytz, G. (1994). Noise reduction by
noise-adaptive spectral magnitude expansion. Journal
of the Audio Engineering Society.
Habets, E. (2007). Single- and Multi-Microphone Speech
Dereverberation using Spectral Enhancement. PhD
thesis, Technische Universiteit Eindhoven.
Haykin, S. (2002). Adaptive Filter Theory. Prentice Hall.
J. Benesty, T. Gansler, D. M. M. S. and Gay, S. (2001). Ad-
vances in Network and Acoustic Echo Cancellation.
Springer.
J. Picone, M. J. and Hartwell, W. (1988). Enhancing the
performance of speech recognition with echo cancel-
lation. In IEEE Int. Conf. Acoustic, Speech, and Signal
Processing (ICASSP).
M. Berouti, R. S. and Makhoul, J. (1979). Enhancement of
speech corrupted by acoustic noise. In IEEE Int. Conf.
Acoustic, Speech, and Signal Processing (ICASSP),
volume 4, pages 208–211.
Shynk, J. (1992). Frequency-domain and multirate adaptive
filtering. IEEE Signal Processing Magazine.
Tashev, I. (2006). Defeating Ambient Noise: Practical Ap-
proaches for Noise Reduction and Suppression. Tuto-
rial at ICASSP.
Triki, M. (2009). Performance issues in recursive least-
squares adaptive gsc for speech enhancement. In IEEE
Int. Conf. Acoustic, Speech, and Signal Processing
(ICASSP).
X. Huang, A. A. and Hon, H. (2001). Spoken Language
Processing. Carnegie Mellon University.
ON SPEECH RECOGNITION PERFORMANCE UNDER NON-STATIONARY ECHO CANCELLATION
321
