
PROBABILISTIC PLAN RECOGNITION FOR INTELLIGENT
INFORMATION AGENTS
Towards Proactive Software Assistant Agents
Jean Oh, Felipe Meneguzzi and Katia Sycara
Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, U.S.A.
Keywords:
Proactive assistant agents, Probabilistic plan recognition, Information agents, Agent architecture.
Abstract:
In this paper, we present a software assistant agent that can proactively manage information on behalf of cog-
nitively overloaded users. We develop an agent architecture, known here as ANTicipatory Information and
Planning Agent (ANTIPA), to provide the user with relevant information in a timely manner. In order both to
recognize user plans unobtrusively and to reason about time constraints, ANTIPA integrates probabilistic plan
recognition with constraint-based information gathering. This paper focuses on our probabilistic plan predic-
tion algorithm inspired by a decision theory that human users make decisions based on long-term outcomes.
A proof of concept user study shows a promising result.
1 INTRODUCTION
When humans engage in complex activities that chal-
lenge their cognitive skills and divide their attention
among multiple competing tasks, the quality of their
task performance generally degrades. Consider, for
example, an operator (or a user) at an emergency cen-
ter who needs to coordinate rescue teams for two si-
multaneous fires within her jurisdiction. The user
needs to collect the current local information regard-
ing each fire incident in order to make adequate de-
cisions concurrently. Due to the amount of informa-
tion needed and the constraints that the decisions must
be made urgently the user can be cognitively over-
loaded, resulting in low quality decisions. In order
to assist cognitively overloaded users, research on in-
telligent software agents has been vigorous, as illus-
trated by numerous recent projects (Chalupsky et al.,
2002; Freed et al., 2008; Yorke-Smith et al., 2009).
In this paper, we present an agent architecture
known here as ANTicipatory Information and Plan-
ning Agent (ANTIPA) that can recognize the user’s
high-level goals (and the plans towards those goals)
and prefetch information relevant to the user’s plan-
ning context, allowing the user to focus on problem
solving. In contrast to a reactive approach to assis-
tance that uses certain cues to trigger assistive actions,
we aim to predict the user’s future plan in order to
proactively seek information ahead of time in antici-
pation of the users’s need, offsetting possible delays
and unreliability of distributed information.
In particular, we focus on our probabilistic plan
recognition algorithm following a decision-theoretic
assumption that the user tries to reach more valuable
world states (goals). Specifically, we utilize a Markov
Decision Processes (MDP) to predict a stochastic user
behavior, i.e.,the better the consequence of an action
is, the more likely the user takes the action. We first
present the algorithm for a fully observable setting,
and then generalize the algorithm for partially observ-
able environments where the assistant agent may not
be able to fully observe the user’s current states and
actions.
The main contributions of this paper are as fol-
lows. We present the ANTIPA architecture that en-
ables the agent to perform proactive information man-
agement by seamlessly integrating information gath-
ering with plan recognition. In order to accommo-
date the user’s changing needs, the agent continuously
updates its prediction of the user plan and adjusts
its information-gathering plan accordingly. Among
the components of the ANTIPA architecture, this pa-
per is focused on describing our probabilistic plan
recognition algorithm for predicting the user’s time-
constrained needs for assistance. For a proof of con-
cept evaluation, we design and implement an abstract
281
Oh J., Meneguzzi F. and Sycara K..
PROBABILISTIC PLAN RECOGNITION FOR INTELLIGENT INFORMATION AGENTS - Towards Proactive Software Assistant Agents.
DOI: 10.5220/0003187102810287
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 281-287
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

game that is simple yet conveys the core characteris-
tics of information-dependent planning problem, and
report promising preliminary user study results.
2 RELATED WORK
Plan recognition refers to the task of identifying a
user’s high-level goals (or intentions) by observing
the user’s current activities (Armentano and Amandi,
2007). The majority of existing work in plan recog-
nition relies on a plan library that represents a set of
alternative ways to solve a domain-specific problem,
and aims to find a plan in the library that best explains
the observed behavior. In order to avoid the cumber-
some process of constructing elaborate plan libraries
of all possible plan alternatives, recent work proposed
the idea of formulating plan recognition as a plan-
ning problem using classical planners (Ram
´
ırez and
Geffner, 2009) or decision-theoretic planners (Baker
et al., 2009). In this paper, we develop a plan recog-
nition algorithm using a decision-theoretic planner.
A Markov Decision Process (MDP) is a rich
decision-theoretic model that can concisely represent
various real-life decision-making problems (Bellman,
1957). In cognitive science, MDP-based cognition
models have been proposed to represent computation-
ally how people predict the behavior of other (ratio-
nal) agents (Baker et al., 2009). Based on the as-
sumption that the observed actor tries to achieve some
goals, human observers predict that the actor would
act optimally towards the goals; the MDP-based mod-
els were shown to reflect such human observers’ pre-
dictions. In this paper, we use an MDP model to de-
sign a software assistant agent to recognize user be-
havior. In this regard, we can say that our algorithm
is similar to how human assistants would predict the
user’s behavior.
A Partially Observable MDP (POMDP) approach
was used in (Boger et al., 2005) to assist demen-
tia patients, where the agent learns an optimal pol-
icy to take a single best assistive action in the current
context. In contrast, ANTIPA separates plan recogni-
tion from the agent’s action selection (e.g.,gathering
or presenting information), which allows the agent
to plan and execute multiple alternative information-
gathering (or information-presenting) actions, while
reasoning about time constraints.
3 THE ANTIPA ARCHITECTURE
In order to address the challenges of proactive infor-
mation assistance, we have designed the ANTIPA ar-
chitecture (Oh et al., 2010) around four major mod-
ules: observation, cognition, assistance, and interac-
tion as illustrated in Figure 1.
Plan
recognition
Workload
estimation
Cognition
Information
management
Policy
management
Assistance
Keyboard
…
…
Feedback
…
Observation
negotiate
retrieve
Info. presenter
…
Warning alert
Interaction
Predicted
user plan
Figure 1: The ANTIPA agent architecture.
Observation Module receives various inputs from
the user’s computing environment, and translates
them into observations suitable for the cognition mod-
ule. Here, the types of observations include the key-
board and mouse inputs or the user feedback on the
agent assistance.
Cognition Module uses the observations received
from the observation module to model the user be-
havior. For instance, the plan recognition submod-
ule continuously interpret the observations to recog-
nize the user’s plans for current and future activities.
At the same time, in order to prevent overloading the
user with too much information, the workload estima-
tion submodule is responsible for assessing the user’s
current mental workload. Here, workload can be es-
timated using various observable metrics such as the
user’s job processing time to determine the level of
assistance that the user needs.
Assistance Module is responsible for deciding the ac-
tual actions that the agent can perform to assist the
user. For instance, given a predicted user plan, an
information management module can prefetch spe-
cific information needed in the predicted user plan,
while the policy management module can verify the
predicted plan according to the policies that the user
must abide by. Our focus here is on information
management. In order to manage information effi-
ciently, we construct an information-gathering plan
that must consider the tradeoff between obtaining
the high-priority information (which is most relevant
to user plan) and satisfying temporal deadline con-
straints (indicating that information must be obtained
before the actual time when the user needs it).
Interaction Module decides when to offer certain in-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
282

formation to the user based on its belief about the rel-
evance of information to the user’s current state, as
well as the format of information that is aligned with
the user’s cognitive workload. In order to accomplish
this task, the interaction module receives retrieved in-
formation from the information management module,
and determines the timing for information presenta-
tion based on the user mental workload assessed by
the cognition module.
Note that the focus this paper is on the plan recog-
nition module to identify the user’s current plan and
predict its future steps. Thus, we shall not go into
further detail about the other modules, except where
necessary for the understanding of plan recognition.
4 PLAN RECOGNITION
Based on the assumption that a human user intends
to act rationally, we use a decision-theoretic model
to represent a human user’s reasoning about conse-
quences to maximize her long-term rewards. We first
assume that the agent can fully observe the user’s cur-
rent state and action, and knows the user’s starting
state. These assumptions will later be relaxed as de-
scribed in Section 4.4.
4.1 MDP-based User Model
We take a Markov Decision Process (MDP) to repre-
sent the user’s planning process. An MDP is a state-
based model of a sequential (discrete time) decision-
making process for a fully observable environment
with a stochastic transition model, i.e.,there is no un-
certainty regarding the user’s current state, but transi-
tioning from one state to another is nondeterministic
(Bellman, 1957). The user’s objective, modeled in an
MDP, is to create a plan that maximizes her long-term
cumulative reward.
Formally, an MDP is represented as a tuple
hS, A, r, T, γi where S denotes a set of states; A, a set of
actions; r : S ×A → R, a function specifying a reward
(from an environment) of taking an action in a state;
T : S ×A × S → R, a state transition function; and γ, a
discount factor indicating that a reward received in the
future is worth less than an immediate reward. Solv-
ing an MDP generally refers to a search for a policy
that maps each state to an optimal action with respect
to a discounted long-term expected reward.
4.2 Goal Recognition
The first part of our algorithm recognizes the user’s
current goals from a set of candidate goals (or re-
Algorithm 1: An algorithm for plan recognition.
1: function PREDICT-USER-PLAN (MDP Φ, goals
G, observations O)
2: t ← Tree()
3: n ← Node()
4: addNodeToTree(n,t)
5: current-state s ← getLastObservation(O)
6: for all goal g ∈ G do
7: π
g
← valueIteration(Φ, g)
8: w
g
← Equation (1)
9: BLD-PLAN-TREE(t, n, π
g
, s, w
g
, 0)
warding states) from an observed trajectory of user
actions. We define set G of possible goal states as
all states with positive rewards such that G ⊆ S and
r(g) > 0, ∀g ∈ G.
Initialization. The algorithm initializes the proba-
bility distribution over the set G of possible goals,
denoted by p(g) for each goal g in G, proportion-
ally to the reward r(g): such that
∑
g∈G
p(g) = 1 and
p(g) ∝ r(g). The algorithm then computes an optimal
policy π
g
for each goal g in G, considering a positive
reward only from the specified goal state g and zero
rewards from any other states s ∈ S ∧ s 6= g. We use
a variation of the value iteration algorithm (Bellman,
1957) for solving an MDP (line 7 of Algorithm 1).
Goal Estimation. Let O
t
= s
1
, a
1
, s
2
, a
2
, ..., s
t
, a
t
de-
note a sequence of observed states and actions from
time steps 1 through t where s
t
0
∈ S, a
t
0
∈ A, ∀t
0
∈
{1, ...,t}. Here, the assistant agent needs to estimate
the user’s targeted goals.
After observing a sequence of user states and ac-
tions, the assistant agent updates the conditional prob-
ability p(g|O
t
) of that the user is pursuing goal g
given the sequence of observations O
t
. The condi-
tional probability p(g|O
t
) can be rewritten using the
Bayes rule as:
p(g|O
t
) =
p(s
1
, a
1
, ..., s
t
, a
t
|g)p(g)
∑
g
0
∈G
p(s
1
, a
1
, ..., s
t
, a
t
|g
0
)p(g
0
)
.(1)
By applying the chain rule, we can write the condi-
tional probability of observing the sequence of states
and actions given a goal as:
p(s
1
, a
1
, ...,s
t
, a
t
|g) = p(s
1
|g)p(a
1
|s
1
, g)p(s
2
|s
1
, a
1
, g)
... p(s
t
|s
t−1
, a
t−1
, ...,s
1
, g).
By the MDP problem definition, the state transi-
tion probability is independent of the goals. By the
Markov assumption, the state transition probability is
also independent of any past states except the current
state, and the user’s action selection depends only on
PROBABILISTIC PLAN RECOGNITION FOR INTELLIGENT INFORMATION AGENTS - Towards Proactive
Software Assistant Agents
283

the current state and the specific goal. Using these
conditional independence relationships, we get:
p(s
1
, a
1
, ..., s
t
, a
t
|g) = p(s
1
)p(a
1
|s
1
, g)p(s
2
|s
1
, a
1
)
... p(s
t
|s
t−1
, a
t−1
), (2)
where the probability p(a|s, g) represents the user’s
stochastic policy π
g
(s, a) for selecting action a from
state s given goal g that has been computed at the ini-
tialization step.
By combining Equation 1 and 2, the conditional
probability of a goal given a series of observations can
be obtained. We use this conditional probability to
assign weights when constructing a tree of predicted
plan steps. That is, a set of likely plan steps towards a
goal is weighted by the conditional probability of the
user pursuing the goal.
Handling Changing Goals. The user may change
a goal during execution, or the user may interleave
plans for multiple goals at the same time. Our al-
gorithm for handling changing goals is to discount
the values of old observations as follows. The like-
lihood of a sequence of observations given a goal
is expressed in a product form such that p(O
t
|g) =
p(o
t
|O
t−1
, g) × ... × p(o
2
|O
1
, g) × p(o
1
|g). In or-
der to discount the mass from each observation
p(o
t
|O
t−1
, g) separately, we first take the logarithm
to transform the equation to a sum of products, and
then discount each term as follows:
log[p(O
t
|g)] = γ
0
log[p(o
t
|O
t−1
, g)] +
... +γ
t−1
log[p(o
1
|g)],
where γ is a discount factor such that the most re-
cent observation is not discounted and the older ob-
servations are discounted exponentially. Since we are
only interested in relative likelihood of observing the
given sequence of states and actions given a goal,
such a monotonic transformation is valid (although
this value no longer represents a probability).
4.3 Plan Prediction
The second half of the algorithm is designed to pre-
dict the most likely sequence of actions that the user
will take in the future. Here, we describe an algo-
rithm for predicting plan steps for one goal. Using
the goal weights that have been computed earlier us-
ing Equation 1, the algorithm combines the predicted
plan steps for all goals as shown in Algorithm 1.
Initialization. The algorithm computes an optimal
stochastic policy π for the MDP problem with one
specific goal state. This policy can be computed by
solving the MDP to maximize the long-term expected
Algorithm 2: Recursive building of a plan tree.
function BLD-PLAN-TREE(plan-tree t, node n, policy
π, state s, weight w, deadline d)
for all action a ∈ A do
w
0
← π(s, a)w
if w
0
> threshold θ then
n
0
← Node(action a, priority w
0
, deadline d)
add new child node n
0
to node n
s
0
← sampleNextState(state s, action a)
BLD-PLAN-TREE(t, n
0
, π, s
0
, w
0
, d + 1)
rewards. Instead of a deterministic policy that spec-
ifies only the best action that results in the maxi-
mum reward, we compute a stochastic policy such
that probability p(a|s, g) of taking action a given state
a when pursuing goal g is proportional to its long-
term expected value v(s, a, g):
p(a|s, g) ∝ β v(s, a, g),
where β is a normalizing constant. The intuition for
using a stochastic policy is to allow the agent to ex-
plore multiple likely plan paths in parallel, relaxing
the assumption that the user always acts to maximize
her expected reward.
Plan-tree Construction. From the last observed user
state, the algorithm constructs the most likely future
plans from that state. Thus, the resulting output is a
tree-like plan segment, known here as a plan-tree, in
which a node contains a predicted user-action asso-
ciated with the following two features: priority and
deadline. We compute the priority of a node from
the probability representing the agent’s belief that the
user will select the action in the future; that is, the
agent assigns higher priorities to assist those actions
that are more likely to be taken by the user. On the
other hand, the deadline indicates the predicted time
step when the user will execute the action; that is, the
agent must prepare assistance before the deadline by
which the user will need help.
The recursive process of predicting and construct-
ing a plan tree from a state is described in Algo-
rithm 2. The algorithm builds a plan-tree by travers-
ing the most likely actions (to be selected by the user)
from the current user state according to the policy
generated from the MDP user model. We create a new
node for an action if the policy prescribes a higher
probability to the action than some threshold θ; ac-
tions are pruned otherwise. After adding a new node,
the next state is sampled according to the stochastic
state transition of the MDP, and the routine is called
recursively for the sampled next state. The resulting
plan-tree represents a horizon of sampled actions for
which the agent can prepare appropriate assistance.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
284
3
6
0
4 5
21
11
E S S
N
W S EE
Time step
4-1
4-5 5-8
8-11
4-3 3-6 6-7
7-8
Root
node
N: North
E: East
W: West
S: South
Information
needed for action S:
keycode to move
from room 8 to 11
1 2 3
Current position: 4
Destination: 11
E
5-…
pruned
0 1 2
3 4 5
6 7 8
Node for action S at
time step 3
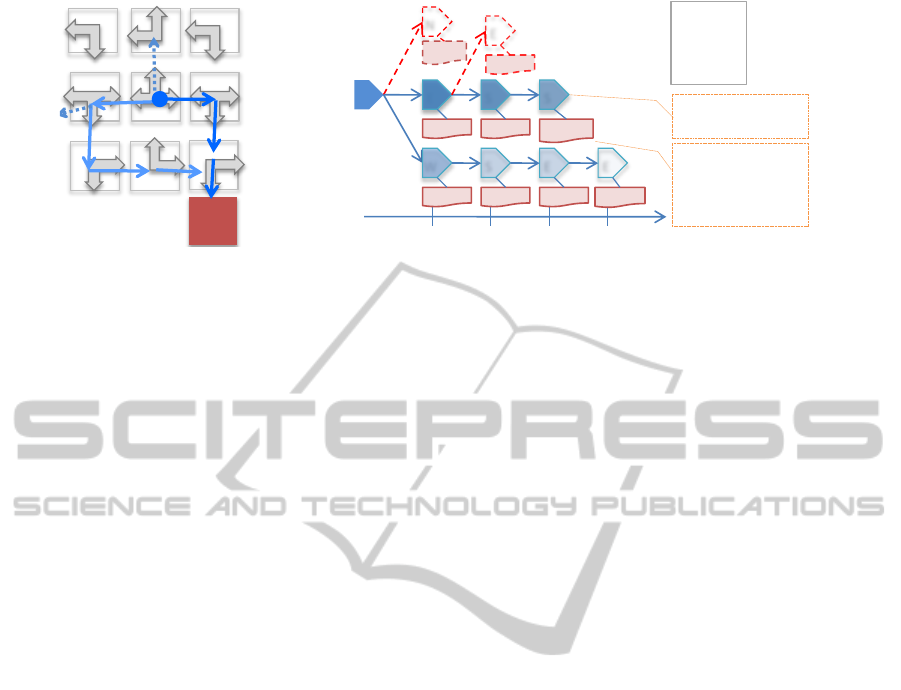
Figure 2: An example of a navigation problem (left) and a predicted user plan (right).
Illustrative Example. Figure 2 shows an example
where the user is navigating a grid to reach a destina-
tion (left). All available actions in a room are drawn
in boxed arrows. A stochastic state transition is omit-
ted here but we assume each action fails with some
probability, e.g.,the turning to the east action may fail,
resulting in the user’s current position unchanged. Let
us assume that the user needs information about a tar-
get location whenever making a move, e.g.,a key code
is required to move from one room to another. In
this problem, the agent generates a plan-tree of pos-
sible future user actions associated with relevant key
code information that the user will need for those ac-
tions (right). A node is shaded to reflect the predicted
probability of the user taking the associated action
(i.e.,the darker, the more likely), and the time step
represents the time constraint of information gather-
ing. The predicted plan (right) thus illustrates alterna-
tive plan steps towards the destination, putting more
priorities on shorter routes.
4.4 Handling Partial Observability
Hitherto we have described algorithms based on the
agent’s full observability on user states. We extend
our approach to handle a partially observable model
for the case when the assistant agent cannot directly
observe the user states and actions. Instead of observ-
ing the user’s states and actions directly, the agent
maintains a probability distribution over the set of
user states, known as a belief state, that represents
the agent’s belief regarding the user’s current state
inferred from indirect observations such as keyboard
and mouse inputs from the user’s computing environ-
ment or sensory inputs from various devices. For in-
stance, if no prior knowledge is available the initial
belief state can be a uniform distribution, indicating
that the agent believes that the user can be in any state.
The fully observable case can also be represented as
a special case of belief state where the whole proba-
bility mass is concentrated in one state. We use the
forward algorithm (Rabiner, 1989) to update a belief
state given a sequence of observations. We omit the
details due to space limitation.
5 EXPERIMENTS
As a proof of concept evaluation, we designed the
Open-Sesame game, that succinctly represents an
information-dependent planning problem. We note
that Open-Sesame is not meant to fully represent a
real-world scenario, but rather to evaluate the abil-
ity of ANTIPA to predict information needs in a con-
trolled environment.
The Open-sesame Game. The game consists of a
grid-like maze where the four sides of a room in the
grid can either be a wall or a door to an adjacent room;
the user must enter a specific key code to open each
door. Figure 2 (left) shows a simplified example. The
key codes are stored in a set of information sources;
a catalog of information sources specifies which keys
are stored in each source as well as the statistical prop-
erties of the source. The user can search for a needed
key code using a browser-like interface. Here, de-
pending on the user’s planned path to the goal, the
user needs a different set of key codes. Thus, the key
codes to unlock the doors represent the user’s infor-
mation needs. In this context, the agent aims to pre-
dict the user’s future path and prefetch the key codes
that the user will need shortly.
Settings. We created three Open-Sesame games: one
6 × 6 and two 7 × 7 grids with varying degrees of dif-
ficulty. The key codes were distributed over 7 infor-
mation sources with varying source properties. The
only type of observations for the agent was the room
color which had been randomly selected from 7 col-
ors (here, we purposely limited the agent’s observa-
tion capability to simulate a partially observable set-
ting). The agent was given the map of a maze, the
user’s starting position, and the catalog of information
PROBABILISTIC PLAN RECOGNITION FOR INTELLIGENT INFORMATION AGENTS - Towards Proactive
Software Assistant Agents
285

Table 1: User study results for with (+) and without (−)
agent assistance.
−agent +agent
Total time (sec) 300 262.2
Total query time (sec) 48.1 10.7
Query time ratio 0.16 0.04
# of moves 13.2 14.6
# of steps away from goal 6.3 3
sources. During the experiments, each human subject
was given 5 minutes of time to solve a game either
with or without the agent assistance. In the experi-
ments, total 13 games were played by 7 subjects.
Results. The results are summarized in Table 1 that
compares the user performance on two conditions:
with and without agent assistance. In the table, the
total time measured the duration of a game; the game
ended when the subject either has reached the goal or
has used up the given time. The results indicate that
the subjects without agent assistance (−agent in Ta-
ble 1) were not able to reach a goal within the given
time, whereas the subjects with the agent assistance
(+agent) achieved a goal within the time limit in 6
out of 13 games. The total query time refers to the
time that a human subject has spent for information
gathering, averaged over all the subjects under the
same condition (i.e.,with or without agent assistance),
and the query time ratio represents how much time a
subject spent for information gathering relative to the
total time. The agent assistance reduced the user’s
information-gathering time to less than
1
4
.
In this experiment, we interpret the number of
moves that the user has made during the game (# of
moves) as the user’s search space in an effort to find
a solution. On the other hand, the length of the short-
est path to the goal from the user’s ending state (# of
steps away from goal) can be considered as the qual-
ity of solution. The size of test subjects is too small
to draw a statistical conclusion. These initial results
are, however, promising since they indicate that intel-
ligent information management generally increased
the user’s search space and improved the user’s per-
formance with respect to the quality of solution.
6 CONCLUSIONS
The main contributions of this paper are the fol-
lowing. We presented an intelligent information
agent, ANTIPA, that anticipates the user’s informa-
tion needs using probabilistic plan recognition and
performs information gathering prioritized by the pre-
dicted user constraints. In contrast to reactive assis-
tive agent models, ANTIPA is designed to provide
proactive assistance by predicting the user’s time-
constrained information needs. The ANTIPA archi-
tecture allows the agent to reason about time con-
straints of its information-gathering actions; accom-
plishing equivalent behavior using a POMDP would
take an exponentially larger state space since the
state space must include the retrieval status of all in-
formation needs in the problem domain. We em-
pirically evaluated ANTIPA through a proof of con-
cept experiment in an information-intensive game set-
ting and showed promising preliminary results that
the proactive agent assistance significantly reduced
the information-gathering time and enhanced the user
performance during the games.
In this paper, we have not considered the case
where the agent has to explore and learn about an
unknown (or previously incorrectly estimated) state
space. We made a specific assumption that the agent
knows the complete state space from which the user
may explore only some subset. In real-life scenarios,
users generally work in a dynamic environment where
they must constantly collect new information regard-
ing the changes in the environment, sharing resources
and information with other users. In order to address
such special issues that arise in the dynamic settings,
in our future work we will investigate techniques for
detecting environmental changes, incorporating new
information, and alerting the user of changes in the
environment.
ACKNOWLEDGEMENTS
This research was sponsored by the U.S. Army Re-
search Laboratory and the U.K. Ministry of De-
fence and was accomplished under Agreement Num-
ber W911NF-06-3-0001. The views and conclusions
contained in this document are those of the authors
and should not be interpreted as representing the offi-
cial policies, either expressed or implied, of the U.S.
Army Research Laboratory, the U.S. Government, the
U.K. Ministry of Defence or the U.K. Government.
The U.S. and U.K. Governments are authorized to re-
produce and distribute reprints for Government pur-
poses notwithstanding any copyright notation hereon.
REFERENCES
Armentano, M. G. and Amandi, A. (2007). Plan recognition
for interface agents. Artif. Intell. Rev., 28(2):131–162.
Baker, C., Saxe, R., and Tenenbaum, J. (2009). Action un-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
286

derstanding as inverse planning. Cognition, 31:329–
349.
Bellman, R. (1957). A markov decision process. Journal of
Mathematical Mechanics, 6:679–684.
Boger, J., Poupart, P., Hoey, J., Boutilier, C., Fernie, G., and
Mihailidis, A. (2005). A decision-theoretic approach
to task assistance for persons with dementia. In Proc.
IJCAI, pages 1293–1299.
Chalupsky, H., Gil, Y., Knoblock, C., Lerman, K., Oh, J.,
Pynadath, D., Russ, T., and Tambe, M. (2002). Elec-
tric Elves: Agent technology for supporting human or-
ganizations. AI Magazine, 23(2):11.
Freed, M., Carbonell, J., Gordon, G., Hayes, J., Myers, B.,
Siewiorek, D., Smith, S., Steinfeld, A., and Tomasic,
A. (2008). Radar: A personal assistant that learns to
reduce email overload. In Proc. AAAI.
Oh, J., Meneguzzi, F., and Sycara, K. P. (2010). ANTIPA:
an architecture for intelligent information assistance.
In Proc. ECAI, pages 1055–1056. IOS Press.
Rabiner, L. (1989). A tutorial on HMM and selected
applications in speech recognition. Proc. of IEEE,
77(2):257–286.
Ram
´
ırez, M. and Geffner, H. (2009). Plan recognition as
planning. In Proc. IJCAI, pages 1778–1783.
Yorke-Smith, N., Saadati, S., Myers, K. L., and Morley,
D. N. (2009). Like an intuitive and courteous butler:
a proactive personal agent for task management. In
Proc. AAMAS, pages 337–344.
PROBABILISTIC PLAN RECOGNITION FOR INTELLIGENT INFORMATION AGENTS - Towards Proactive
Software Assistant Agents
287
