
HIVE-BDI: EXTENDING JASON WITH SHARED BELIEFS
AND STIGMERGY
Matteo Barbieri and Viviana Mascardi
Department of Computer Science (DISI), University of Genova, Genova, Italy
Keywords:
BDI agents, MASs, Stigmergy, Belief sharing, Agent coordination.
Abstract:
The classic BDI model focuses on the internal functioning of a single-agent architecture. Neither shared
beliefs nor spontaneous and indirect coordination via the environment are supported. We describe Hive-BDI,
an extension of the Jason BDI-style language with shared beliefs implemented via the logic-based coordination
language ReSpecT and with stigmergy obtained via digital pheromones. A case study where robots roaming
an unknown environment collaborate for creating a map demonstrates the feasibility of our approach.
1 INTRODUCTION
The classic BDI model (Rao and Georgeff, 1991) fo-
cuses on the internal functioning of a single-agent ar-
chitecture: the way events taking place in the envi-
ronment are perceived and the way agents can orga-
nize themselves by sharing mental attitudes are not
addressed. No form of spontaneous and indirect coor-
dination via the environment (stigmergy (Bonabeau,
1999)) is supported, and information belonging to an
agent’s private set of beliefs can be shared only by ex-
plicit communication. Many extensions of this basic
model to cope with groups, teams and organizations
formation have been proposed in the literature (Hep-
ple et al., 2008), and the research interest in achieving
agent coordination via stigmergy has increased in the
last ten years (Valckenaers et al., 2001; Parunak et al.,
2002; Ricci et al., 2007).
The usefulness of a BDI framework supporting
both belief sharing and stigmergy is easy to under-
stand. Imagine a simple scenario where several robots
governed by rational agents are roaming an unknown
environment, collecting data as they move and pro-
cessing them in order to create a shared map. In the
classic BDI model, a previously designated coordina-
tor agent should act as a “shared blackboard” so that
all information collected by every agent in the system
can coexist in the belief base of a single agent. If an
agent needed information about an area inspected by
another agent, he should query the coordinator. Also,
two or more agents that wanted to coordinate in order
to define a joint strategy should adopt sophisticated
negotiation protocols mediated by the coordinator.
Instead of an adaptation of the existing BDI
model, a new model where each agent, still retain-
ing his personal belief base, can also access a shared
knowledge base might prove suitable for avoiding
bottlenecks and for ensuring fault-tolerance. Shared
information should be immediately available to every
other agent in the MAS or in the group of registered
agents and coordination should be achieved via the
environment.
Despite of the advantages of beliefs sharing and
stigmergy, to the best of our knowledge none among
the most widespread BDI frameworks has been ex-
tended yet to support both features. To overcome
this limitation we designed and implemented Hive-
BDI that extends Jason (Bordini et al., 2007) with
shared beliefs by taking advantage of the logic-based
coordination language ReSpecT (Omicini and Denti,
2001), and with stigmergy by introducing digital
pheromones.
The paper is organized in the following way: Sec-
tion 2 describes the technologies upon which Hive-
BDI grounds and analyses the related work; Section
3 gives hints on the Hive-BDI implementation and
briefly discusses Hive-BDI at work; Section 4 con-
cludes.
479
Barbieri M. and Mascardi V..
HIVE-BDI: EXTENDING JASON WITH SHARED BELIEFS AND STIGMERGY.
DOI: 10.5220/0003291504790482
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 479-482
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 BACKGROUND AND RELATED
WORK
Belief Sharing in BDI Settings. Some approaches
and methodologies for belief sharing in MASs already
exist: Glinton et al. (Glinton et al., 2010) present a
formal model and methodology for analyzing and de-
signing two types of multi-agent belief sharing mod-
els, based on Potts and Random Cluster Statistical
Mechanics models respectively, and distinguished by
the mechanism used for information exchange. Other
works by the same research group address the be-
lief sharing problem by taking a perspective of strat-
egy optimization (Velagapudi et al., 2007; Velagapudi
et al., 2008). However, very few attempts to address
belief sharing in BDI languages and frameworks have
been made. According to a recent paper by Hepple
et al. (Hepple et al., 2008) that analyses the state-of-
the-art in agent organization in BDI languages, only
Pynadath et al.’s TEAMCORE (Pynadath et al., 2000)
takes belief sharing as a characterizing feature for
agent organizations ((Hepple et al., 2008), p. 82, Ta-
ble 1). An approach similar to Pynadath’s one is dis-
cussed in (Vieira et al., 2007) where, as examples of
advanced communication features, Vieira et al. show
plans that allow agents to reach shared beliefs and en-
sure that agents are kept informed of the adoption of
their goals by other agents.
Stigmergy in Cognitive MASs. Stigmergy
(Bonabeau, 1999) is a mechanism of spontaneous,
indirect coordination between agents, where the trace
left in the environment by an action stimulates the
performance of a subsequent action, by the same
or a different agent. Stigmergy can be integrated
in a MAS as a different method of communication
between agents, which exchange information by al-
tering the environment releasing digital pheromones
(Dorigo et al., 1996).
We are aware of only three works dealing with
stigmergy in MASs consisting of cognitive agents. In
(Ricci et al., 2007), the impact of stigmergy on the
structure and organization of MASs based on cog-
nitive agents is explored. Coffey and Clark present
the structure of a hybrid architecture for robot control
where a BDI-style planning layer manipulates a plan
library in which plans are comprised of hierarchical,
suspendable and recoverable teleo-reactive programs
(Coffey and Clark, 2006). A shared belief store can
be used by groups of agents. A foraging agent sce-
nario where an ant-style pheromone-laying algorithm
directs the agent’s search by guiding it away from pre-
viously explored areas in a pseudo-random walk is
used to demonstrate the approach. Because of the in-
tegration of shared beliefs and stigmergy, Coffey and
Clark’s work is very close to ours, although it uses a
very different infrastructure. Finally, in (Piunti and
Ricci, 2009) Piunti and Ricci investigate the use of
cognitive artifacts in MAS, as computational entities
designed to store, process and make available infor-
mation relevant for agents to coordinate their coop-
erative distributed activities. The feasibility of their
proposal has been experimented in Ja-Ca (Jason +
CArtAgO, a platform for developing artifact-based
environments for MAS (Ricci et al., 2008)). Although
their work does not explicitly deal with stigmergy, it
is worth mentioning since it might easily support it
and because it is based on Jason, as ours.
Jason. Jason (Bordini et al., 2007) is a Java-based
interpreter for an extended version of AgentSpeak
(Rao, 1996) which allows a high level of customiza-
tion. Our main extension to Jason affected the Be-
liefBase class - as far as belief sharing is concerned
- and the Environment class - as far as the digital
pheromones are concerned. The purpose of Belief-
Base class is to manage the agent’s beliefs. Three
methods handle tuple addition, removal and lookup
(checking whether a tuple exists in the belief base).
The Environment class implements the simulated en-
vironment in which agents are situated. Its purpose
is to update agents’ percepts and react to their ac-
tions upon itself. The default Jason library includes
two classes which may be used to implement an envi-
ronment represented as a grid: GridWorldModel and
GridWorldView.
ReSpecT. ReSpecT (Omicini and Denti, 2001) is a
logic-based coordination language aimed at defining
the behavior of tuple centers in order to coordinate
autonomous computational entities, such as software
agents. Written in Java, its package includes sev-
eral components, in particular it provides Java classes
for the creation and management of Tuple Centers,
namely blackboards where agents can write data in
the form of tuples. There are five main primitive op-
erations which can be executed upon a ReSpecT Tu-
ple Center (TC): out(T) writes a new tuple T on the
TC; rd(T) retrieves a tuple X unifying with T from
the TC (blocking); in(T) extracts a tuple X unifying
with T thus deleting it from the TC (blocking); rdp(T)
is the non-blocking variant of rd(T); and inp(T) is the
non-blocking variant of in(T).
3 HIVE-BDI AT WORK
In this section, we provide a short overview of the
Hive-BDI implementation and an example of use.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
480

More details on both issues can be found in (Barbi-
eri, 2010).
Shared Beliefs. The Hive-BDI shared knowledge
base is implemented with a ReSpecT Tuple Center
to which each agent’s BeliefBase Class connects via
a Socket. The shared knowledge base is composed
of two parts: the Hive Belief Base (referred to as
HiveBB in the sequel) and the Hive Server. Since
the Hive-BDI model still retains personal agent’s be-
liefs which are not accessible from the outside, each
time an operation on agent’s beliefs is invoked, it is
necessary to distinguish whether the belief must be
added, removed or searched for in the shared belief
base or in the agent’s private one. The distinction is
possible thanks to the mustshare annotation that the
Hive-BDI programmer must add to those agent’s be-
liefs that will be stored in the shared belief base. The
HiveBB is implemented as an abstract class that ex-
tends the DefaultBeliefBase Jason class. The Hive
Server is a daemon which can run on a remote ma-
chine and whose purpose is storing shared beliefs and
making them available to the agents in the system.
After deciding that a belief must be shared, a con-
nection with a remote Hive Server is established by
the HiveBB class. Then all information required for
the transaction is encapsulated in an object sent via a
socket to the Hive Server where it is unpacked and the
request is processed. Then another object is created
and filled with response data (the result of requested
operation and additional data.
An agent acts upon his belief base in three
ways: adding, retrieving, deleting a belief to/from his
knowledge base. Adding a new belief to the shared
belief base is a little more complex than just writing
a new tuple to the tuple center: this because in Ja-
son’s default implementation, if we want to add a be-
lief to the Knowledge Base and another belief having
the same functor, arity and arguments but different an-
notations
1
is already present in it, the new belief is not
added: instead its annotations are merged with those
of the belief already present. Retrieving a belief is
actually quite a simple operation to implement, since
the method to override does not really take care of
selecting which belief to return: its task is just to nar-
row down the range of beliefs suitable for unification
with the one passed as parameter. The default imple-
mentation coming with Jason selects beliefs having
the same functor and arity as that one. Finally, dele-
tion of a belief actually deletes the source of the belief
itself from among its annotations. The belief is actu-
ally deleted when it has no more sources. The method
1
Two beliefs having these characteristics will be called
similar.
responsible for belief deletion takes this behavior into
account.
Digital Pheromones. In order to implement a
pheromone-based stigmergy mechanism we cre-
ated a new HouseWorldEnvironment class that in-
cludes properties model and view (whose classes
are respectively HouseWorldModel and HouseWorld-
View, which, in turn, extend GridWorldModel and
GridWorldView). We also defined a new entity
pheromones. Since we need to store information
about the “scent” and intensity of pheromones (i.e.
which agent released it and the intensity of the
trail), the HouseWorldModel class has a private prop-
erty pheromones holding a bi-dimensional array of
Pheromone objects. To make an example, if a cell
of coordinates (3, 7) contains pheromones, all other
information (intensity and scent, in this case) can be
extracted from the object in pheromones[3][7]. Each
time an agent moves in the environment he releases
pheromones in the cell where he ends his move-
ment. The release of pheromones is implemented ba-
sically in two steps inside the addPheromones method
in the HouseWorldModel: first a check is made to
see whether the (x, y) cell where the agent currently
stands is already marked as containing pheromones.
Then a new Pheromone object is created and put
in pheromones[x][y], potentially replacing informa-
tion about pheromones already present in that cell.
The constructor of class Pheromone takes two argu-
ments: a string which identifies the agent releasing
pheromones, and the intensity of the trace left which
determines how long the trace will remain on the cell
before disappearing because of evaporation.
Hive-BDI at Work: Mapping an Unknown En-
vironment. We validated the potential of a model
such as Hive-BDI to implement a MAS where a few
explorer agents coordinated by a leader named queen,
coherently with the Hive metaphor, are able to build
a map of an unknown environment. Explorer agents
represent robots initially placed more or less ran-
domly in the environment whilst the queen has no
physical incarnation. Once the simulation starts, each
explorer begins to map the room he is in, then moves
to the next unexplored room and so on until the whole
environment has been mapped. Each time an agent
perceives pheromones belonging to someone else he
starts following the trail until he meets the agent who
released it: at this point they merge the information
collected up to that moment, adopting a common ref-
erence system for coordinates and thus updating their
beliefs. Figure 1 shows the graphical output of a sim-
ulation run. Blue circles are agents, green tiles rep-
resent pheromone marks released by agents. Differ-
HIVE-BDI: EXTENDING JASON WITH SHARED BELIEFS AND STIGMERGY
481
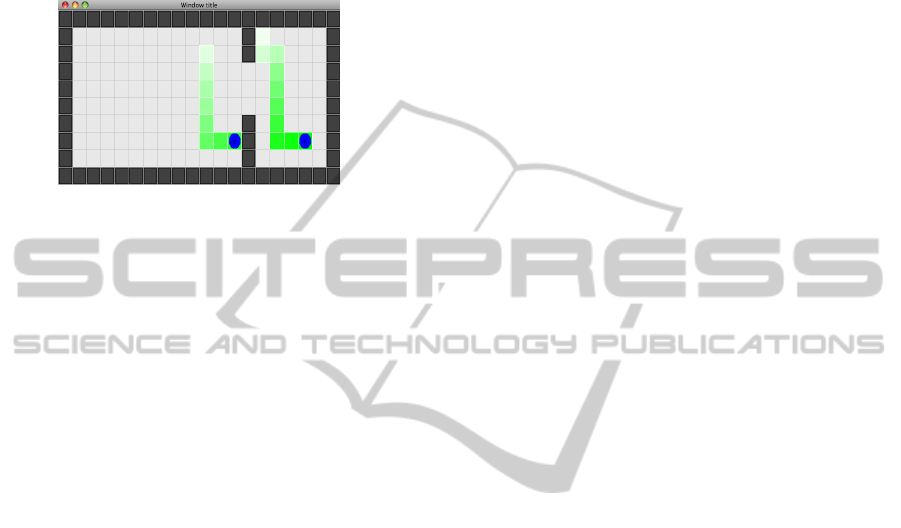
ent shades of green represent pheromones having dif-
ferent intensity. The experiments we carried out on
this simple case study were encouraging and demon-
strated the suitability of the Hive-BDI model and of
its implementation to cope with distributed coordina-
tion problems of this kind.
Figure 1: Screenshot taken from a simulation run.
4 CONCLUSIONS
Hive-BDI is suitable for modeling MASs composed
by a relatively large number of agents with limited
capabilities: the system draws its strength from the
cooperation and coordination of agents, giving birth
to an emerging intelligence.
Of course more complex agents, fully exploiting
the BDI potential, can be part of the MAS: the re-
sult would be a MAS involving agents that, despite
being homogeneous and fully interoperable, can be
clustered in different layers according to their reactiv-
ity/deliberativity. More reactive layers would consist
of many simple agents fully exploiting the Hive-BDI
features whereas more deliberative layers would con-
sist of “pure” Jason agents.
Using simpler entities means having less require-
ments in terms of computational and material re-
sources. This may be a desirable feature in real sce-
narios where software agents control physical robots.
When talking about robots, limited capabilities (e.g.,
limited strength or storage capacity, in the case of a
cleaning robot) may imply limited size, thus allowing
such machines to operate in environments otherwise
precluded to bigger ones.
As far as the future of this research activity is
concerned, we are working at enhancing the shared
knowledge base class by fully exploiting the ReSpecT
tuple center and we are experimenting Hive-BDI on
other case studies.
To conclude, the possibility given by Hive-BDI to
define conditions in an agent’s plan’s context, refer-
ring to the shared knowledge of the hive cluster rather
than the agent’s personal belief base really allows to
think of the MAS as a single entity, and therefore to
write plans accordingly: this actually would repre-
sent a paradigm shift in Multi Agent System program-
ming.
REFERENCES
Barbieri, M. (2010). Hive-BDI extending BDI agents with
shared memory. Bachelor’s thesis, University of gen-
ova. http://www.disi.unige.it/person/MascardiV/
Download/Barbieri-Matteo.pdf.
Bonabeau, E. (1999). Editor’s introduction: Stigmergy. Ar-
tificial Life, 5(2):95–96.
Bordini, R. H., Wooldridge, M., and H
¨
ubner, J. F. (2007).
Programming Multi-Agent Systems in AgentSpeak us-
ing Jason. John Wiley & Sons.
Coffey, S. and Clark, K. (2006). A hybrid, teleo-reactive
architecture for robot control. In MARS’06.
Dorigo, M., Maniezzo, V., and Colorni, A. (1996). The
Ant System: Optimization by a colony of cooperat-
ing agents. IEEE Transactions on Systems, Man, and
Cybernetics Part B: Cybernetics, 26(1):29–41.
Glinton, R., Sycara, K., Scerri, D., and Scerri, P. (2010).
The statistical mechanics of belief sharing in multi-
agent systems. Inf. Fusion, 11(3):256–266.
Hepple, A., Dennis, L. A., and Fisher, M. (2008). A com-
mon basis for agent organisation in BDI languages. In
LADS 2007.
Omicini, A. and Denti, E. (2001). Formal ReSpecT. Electr.
Notes Theor. Comput. Sci., 48.
Parunak, H. V. D., Brueckner, S., and Sauter, J. A. (2002).
Digital pheromone mechanisms for coordination of
unmanned vehicles. In AAMAS 2002. ACM.
Piunti, M. and Ricci, A. (2009). Cognitive use of artifacts:
Exploiting relevant information residing in MAS en-
vironments. In KRAMAS 2008.
Pynadath, D. V., Tambe, M., Chauvat, N., and Cavedon,
L. (2000). Toward team-oriented programming. In
ATAL’99.
Rao, A. S. (1996). AgentSpeak(L): BDI agents speak out in
a logical computable language. In MAAMAW’96.
Rao, A. S. and Georgeff, M. P. (1991). Modeling rational
agents within a BDI-architecture. In KR’91. Morgan
Kaufmann.
Ricci, A., Omicini, A., Viroli, M., Gardelli, L., and Oliva,
E. (2007). Cognitive stigmergy: Towards a framework
based on agents and artifacts. In E4MAS 2006.
Ricci, A., Viroli, M., and Omicini, A. (2008). The A&A
programming model and technology for developing
agent environments in MAS. In ProMAS 2007.
Valckenaers, P., Van Brussel, H., Kollingbaum, M. J., and
Bochmann, O. (2001). Multi-agent coordination and
control using stigmergy applied to manufacturing con-
trol. In EASSS 2001.
Velagapudi, P., Prokopyev, O., Scerri, P., and Sycara, K.
(2008). A token-based approach to sharing beliefs in
a large multiagent team. In Optimization and Cooper-
ative Control Strategies.
Velagapudi, P., Prokopyev, O., Sycara, K., and Scerri, P.
(2007). Maintaining shared belief in a large multia-
gent team. In FUSION 2007.
Vieira, R., Moreira, A. F., Wooldridge, M., and Bordini,
R. H. (2007). On the formal semantics of speech-act
based communication in an Agent-Oriented Program-
ming language. J. of Art. Intell. Research, 29.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
482
