
NEONATAL SEIZURE DETECTION
USING BLIND ADAPTIVE FUSION
Huaying Li and Aleksandar Jeremic
Department of Electrical and Computer Engineering, McMaster University, Hamilton, ON, Canada
Keywords:
Seizure detection, Distributed detection, Neonatal seizures, Biomedical signal processing.
Abstract:
Seizure is the result of excessive electrical discharges of neurons, which usually develops synchronously and
happens suddenly in the central nervous system. Clinically, it is difficult for physician to identify neonatal
seizures visually, while EEG seizures can be recognized by the trained experts. Usually, in NICUs, EEG
monitoring systems are used in stead of the expensive on-site supervision. However, it is a waste of time
to review an overnight recording, which motivates the researchers to develop automated seizure detection
algorithms.
Although, there are few detection algorithms existed in the literature, it is difficult to evaluate these mathemat-
ical model based algorithm since their performances vary significantly on different data sets. By extending
our previous results on multichannel information fusion, we propose a distributed detection system consisting
of the existing detectors and a fusion center to detect the seizure activities in the newborn EEG. The advantage
of this proposed technique is that it does not require any priori knowledge of the hypotheses and the detec-
tor performances, which are often unknown in real applications. Therefore, this proposed technique has the
potential to improve the performances of the existing neonatal seizure detectors.
In this paper, we first review two newborn EEG models, one of which is used to generate neonatal EEG signals.
The synthetic data is used later for testing purpose. We also review three existing algorithms on this topic and
implement them to work as the local detectors of the system. Then, we introduce the fusion algorithms applied
in the fusion center for two different scenarios: large sample size and small sample size. We finally provide
some numerical results to show the applicability, effectiveness, and the adaptability of the blind algorithms
in the seizure detection problem. We also provide the testing results obtained using the synthetic to show the
improvement of the detection system.
1 INTRODUCTION
A seizure is defined clinically as a paroxysmal alter-
ation in neurologic function, i.e., behavioural, mo-
tor, or autonomic function. It is a result of exces-
sive electrical discharges of neurons, which usually
develop synchronously and happen suddenly in the
central nervous system (CNS). It is critical to recog-
nize seizures in newborns, since they are usually re-
lated to other significant illnesses. Seizures are also
an initial sign of neurological disease and a potential
cause of brain injury (Volpe, 2001).
In hospitals, a physician usually orders more lab-
oratory tests when it is difficult to use the current test
results to judge if a surgical operation is necessary
or not. Similarly, in the seizure detection problem,
multiple detectors can be used in order to accurately
determine if there are seizure activities in the EEG or
not. These multiple detectors observe the common
phenomenon, the neonatal EEG, and make decisions
on their own observations. The decisions are sent
to a central processor, named as the fusion center.
In the fusion center, the final decision is made by
combining the received decisions in some way. The
phenomenon, multiple local detectors, and the fusion
center are the basic components of a distributed de-
tection system. Usually, when the local decision rules
are fixed, the fusion center requires the perfect knowl-
edge on the prior information of the phenomenon and
the performances of the detectors to optimally fuse
the local decisions. However, such knowledge is not
always available in real applications.
In our previous work, we proposed a blind algo-
rithm for the distributed detection problem with M
hypotheses. The advantage of this proposed fusion
rule is that it does not require the prior knowledge of
the hypotheses or the performances of the local detec-
tors. In this work, we propose to combine the existing
365
Li H. and Jeremic A..
NEONATAL SEIZURE DETECTION USING BLIND ADAPTIVE FUSION.
DOI: 10.5220/0003294903650371
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 365-371
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

single seizure detectors to form a distributed detection
system and apply our previously proposed blind algo-
rithm on multichannel information fusion. First, we
formulate the set of nonlinear equations consisting of
the unknown a priori probabilities of the binary hy-
potheses and the unknown probabilities of false alarm
and missed detection. Then, we estimate these un-
knowns using the corresponding multinominal dis-
tribution, maximum likelihood estimation and actual
count of decisions made by different detectors. Fi-
nally, we present the analytical expression of overall
error probability when the true values of the parame-
ters are given and explore the effect of our blind algo-
rithm to the overall seizure detection. To the evalua-
tion purposes, we use a proposed neonatal EEG model
(Rankine et al., 2007) to generate neonatal EEG sig-
nals.
2 SIGNAL MODEL
2.1 Local Detectors
Several neonatal EEG seizure detection algorithms
exist in the literature. In this paper we implemented
the following three algorithms that have been pro-
posed for the neonatal seizure detection:
Liu’s Algorithm. In(Liu, 1992) the authors fo-
cused on the rhythmic characteristic of neonatal EEG
seizure and proposed a detection algorithm using au-
tocorrelation analysis. Due to the periodicity of EEG
seizure, its autocorrelation function has more peaks
with similar periodicity of the original signal. In con-
trast, normal neonatal EEG does not have clear pe-
riodicity, so its autocorrelation usually has irregular
peaks. A scoring system described in (Liu, 1992) can
be used to determine the degree of periodicity of the
EEG signal quantitatively in order to identify the ex-
istences of the seizure activities.
Gotmans’s Algorithm. In (Gotman, 1997) the au-
thors proposed three different seizure detection meth-
ods to detect three types of seizures: rhythmic dis-
charges, multiple spikes, and very slow rhythmic dis-
charges, respectively. In this paper, we only focus on
the rhythmic discharge detection since it could iden-
tify 90% of the seizures detected by all three detection
algorithms. The rhythmicity of a signal can be repre-
sented in the frequency domain by a high and narrow
peak at the frequency of that signal. Therefore, in the
spectrum of the EEG segment containing seizure ac-
tivities, a large distinct peak is expected to appear at
the main frequency of EEG seizure.
Local
Detector LD
Local
Detector LD
Local
Detector LD
Phenomenon
Fusion
Center
u
u
u
1
2
n
y
1
y
2
y
n
u
0
1
2
n
Figure 1: Parallel Distributed Detection System.
Celka’s Algorithm. The algorithm reviewed in this
section was proposed in (Celka and Colditz, 2002).
They performed the singular spectrum analysis and
the information theoretic-based signal subspace se-
lection to examine the complexity of the EEG signal.
This detection algorithm has three main steps: Pre-
processing, singular spectrum analysis, and minimum
description length.
2.2 Distributed Detection System
Each of the algorithms reviewed in the previous sec-
tion can be considered as a single detector. Since the
statistical properties of neonatal EEG can vary signif-
icantly from patient to patient, it is difficult to evalu-
ate the performance of existing single detectors since
they are all based on mathematical models whose per-
formances change on different data sets. Thus, it mo-
tivates us to combine the existing single detectors and
utilize their strengths by extending previous results
on blind multichannel information fusion (Liu et al.,
2007). Figure 1 shows the structure of a typical paral-
lel distributed detection system with N detectors. The
role of the local detectors LD
n
is to make local deci-
sion u
n
based on their own observations y
n
. All the lo-
cal decisions are then sent to the fusion center, where
the global decision u
0
is made based on a fusion rule
in order to minimize the overall probability of error.
In this work, we only focus on the case of three local
detectors, i.e, N = 3, unless otherwise stated. Addi-
tional detectors can be added into the system when-
ever more information is required to make final deci-
sion. Although increasing the number of detectors has
the potential to reduce the detection error probability,
it also increases the computational cost.
2.3 Local Detectors
The local detectors LD
n
havetheir own decision rules.
We use the three algorithms reviewed in Section 2.1
to formulate the local decision rules.
We perform hypothesis testings (local decisions)
with two hypotheses:
H
0
: The EEG signal does not contain seizure
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
366

H
1
: The EEG signal contains seizure
for the local detector LD
n
. The local decisions u
n
,
n = 1,2,3, are made by
u
n
=
(
0, thenth detector favorsH
0
1, thenth detector favorsH
1
(1)
We use P(H
0
) and P(H
1
) to denote the a priori prob-
ability of the hypothesis H
0
and H
1
, respectively.
A common assumption used here is the lo-
cal observations y
n
are conditionally independent,
given the unknown hypothesis H
i
, i.e., P(y
j
,y
k
|H
i
) =
P(y
j
|H
i
)P(y
k
|H
i
) for all j 6= k and all i.
In a more general problem, the binary hypothesis
testings could be replaced by the hypothesis testings
with more hypotheses, i.e., M = 3.
2.4 Fusion Center
After receiving the local decisions, the fusion center
makes the global decision by applying an optimal fu-
sion rule in order to minimize the final error probabil-
ity. For a binary hypothesis testing problem, the error
probability P
e
is given by
P
e
= P(H
0
)P(u
0
= 1|H
0
) + P(H
1
)P(u
0
= 0|H
1
) (2)
The authors provided the optimality criterion for N
local detectors in the sense of minimum error prob-
ability in (Varshney, 1986). We recall it here for the
case of N = 3.
u
0
=
(
1, if w
0
+
∑
3
n=1
w
n
> 0
0, otherwise
(3)
where, w
0
= log
P
1
P
0
(4)
and w
n
=
(
log((1− P
m
n
)/P
f
n
), if u
n
= 1
log(P
m
n
/(1− P
f
n
)), if u
n
= 0
(5)
The probabilities of false alarm and missed detec-
tion of the nth local detector are denoted as P
f
n
and
P
m
n
, respectively. The optimal fusion rule tells us that
the global decision u
0
is determined by the a priori
probability and the detector performances, i.e., P
1
,
P
f
n
and P
m
n
. However, they are all unknown in our
seizure detection problem, which is usually the case
in many other real applications (Mirjalily, 2003; Liu
et al., 2007). In order to make the final decision, we
need to utilize the information available to us: the lo-
cal binary decisions u
n
.
Suppose the decision combination {u
1
= i, u
2
=
j and u
3
= k} is represented by ℓ = (ijk)
2
, where
i, j,k = 0 or 1 (Mirjalily, 2003). In our system, the
number of all the possible local decision combina-
tions is 2
3
and will be denoted as L in the remainder of
this paper. The joint probability of decision {u
1
= i,
u
2
= j and u
3
= k} is also the occurrence probability
of the ℓth decision combination, given by
P
ℓ
= Pr(u
1
= i, u
2
= j, u
3
= k)
= P(u
1
= i|H
1
)P(u
2
= j|H
1
)P(u
3
= k| H
1
)P
1
(6)
+P(u
1
= i|H
0
)P(u
2
= j|H
0
)P(u
3
= k| H
0
)(1−P
1
)
P(u
n
= i|H
1
) =
(
1− P
m
n
, if i = 1
P
m
n
, if i = 0
(7)
P(u
n
= i|H
0
) =
(
P
f
n
, if i = 1
1− P
f
n
, if i = 0
(8)
In this nonlinear system, only seven out of eight
equations are independent since
∑
P
ℓ
= 1 and there are
seven unknowns P
1
, P
f
n
and P
m
n
, for n = 1,2,3. Thus,
it can be solved theoretically when P
ℓ
are known. Al-
though P
ℓ
is usually unavailable in practice, it could
be replaced by empirical probability defined as
P
ℓ
= Pr(u
1
= i,u
2
= j,u
3
= k)
≃
number ofu
1
= i,u
2
= j,u
3
= k
number of local decisionsN
t
(9)
where N
t
is the number of decisions made by one of
the local detectors. Eq. (9) is true usually when the
number of decisions is large (Liu et al., 2007).
The analytical solution to the above nonlinear
equations is given in (Mirjalily, 2003). However, the
usage of Eq. (9) is limited when the number of deci-
sions is not large enough. In our particular case the
number of seizures occurring can be rather small and
thus can yield inaccurate estimation results. To es-
timate those unknown probabilities in this situation,
let us first define the random variable X
ℓ
to repre-
sent the number of occurrences of the ℓth decision
combination. Recall P
ℓ
is the corresponding occur-
rence probability, defined earlier in Eq. (6). Let X =
(X
1
,X
2
,.. . ,X
L
) denote the occurrence numbers of all
eight decision combinations, which are multinomially
distributed with probability mass function (Liu et al.,
2007)
P(X
1
= x
1
,..., X
L
= x
L
|N
t
) =
N
t
!
x
1
!...x
L
!
P
x
1
1
...P
x
L
L
(10)
and var(X
ℓ
) = N
t
P
ℓ
(1− P
ℓ
), cov(X
s
X
ℓ
) = −N
t
P
s
P
ℓ
for s = 1,. .. , L and s 6= ℓ.
We also define a 7-dimensional vector p,
named performance vector, contain the true val-
ues of the a priori probability and the false
NEONATAL SEIZURE DETECTION USING BLIND ADAPTIVE FUSION
367
alarm and missed detection probabilities, i.e., p =
[P(H
1
) P
f
1
P
f
2
P
f
3
P
m
1
P
m
2
P
m
3
]. Suppose z
ℓ
is the esti-
mate of the ℓth occurrence probability and
z
ℓ
= f
ℓ
(p) + e
ℓ
, ℓ = 1, .. .,L (11)
where e
ℓ
is the estimation error. Now we define a vec-
tor z = [z
1
z
2
... z
L
]
T
, f(p) = [ f
1
(p) f
2
(p) ... f
L
(p)]
T
,
and e = [e
1
e
2
... e
L
]
T
. Thus, the nonlinear system of
probability equations can be rewritten in the matrix
format as
z = f(p) + e (12)
where z, f(p) and e are the matrices of the estimates
of the occurrence probabilities, their true values, and
the estimation error, respectively. Since the distribu-
tion of the occurrences of the decision combinations
is given by Eq. (10), we could apply maximum likeli-
hood estimator to find the unknownparameters which
make the observed outcome most likely to happen.
It means that as long as the occurrence numbers are
known, the ML estimator gives the value of p that
maximize Equation (10).
3 NUMERICAL RESULTS
In this chapter, we present numerical results in order
to show the applicability of the blind adaptive algo-
rithms to the neonatal seizure detection problem. Due
to a possibly non-stationary nature of the EEG sig-
nals, time-dependent approach may be needed in or-
der to correctly estimate the time-varying parameters.
In this case, the number of decisions available for es-
timation may be limited. To this purpose, we evalu-
ate the algorithm for two scenarios: small sample size
and large sample size. We also perform tests using
the surrogate data generated by the models described
in Section 2.1 to show the improvement of the detec-
tion system.
3.1 Large Data Set
Recall that we defined the performance vector as p =
[P(H
1
) P
f
1
P
f
2
P
f
3
P
m
1
P
m
2
P
m
3
] in the previous chap-
ter. In this example, we generate the binary lo-
cal decisions u
n
by using an arbitrarily chosen p =
[0.2 0.08 0.17 0.12 0.23 0.18 0.15]. Applying the
blind adaptive algorithm (Mirjalily, 2003), the global
decision u
0
is then obtained by calculating the non-
linear set of equations. The decision number N
t
is
set to be 1000 and the simulation is performed 5000
times. The estimated unknown probabilities of false
alarm P
f
n
and missed detection P
m
n
are then averaged
0 200 400 600 800 1000
0
0.1
0.2
True Value of P
f
n
= [0.08 0.17 0.12]
P
1
f
= 0.0798
0 200 400 600 800 1000
0
0.2
0.4
False Alarm
P
2
f
= 0.1697
0 200 400 600 800 1000
0
0.1
0.2
Number of decisions
P
3
f
= 0.1197
Figure 2: Averaged False Alarm Rate over 5000 Realiza-
tions.
0 200 400 600 800 1000
0
0.2
0.4
True Value of P
m
n
= [0.23 0.18 0.15]
P
1
m
= 0.2286
0 200 400 600 800 1000
0
0.1
0.2
Missed Detection
P
2
m
= 0.1793
0 200 400 600 800 1000
0
0.1
0.2
Number of decisions
P
3
m
= 0.1477
Figure 3: Averaged Missed Detection Rate over 5000 Real-
izations.
over 5000 realizations, and these are shown in Fig-
ure 2 and 3, respectively. As expected these plots
show that the estimated values of the probabilities
converge to their true values.
In Figure 4, the upper plots show the averaged er-
ror probabilities of the local detectors and the lower
plot shows the averaged overall error probability of
the system. It is clear that by fusing the detection
probabilities the overall performance of the detection
system is much better than any of the local detectors
in terms of low error probability.
3.2 Adaptability to the Changes of
Phenomenon
As we discussed before, the statistical properties of
the neonatal EEG signals are time-dependent. We
present a numerical example to show the adaptabil-
ity of the blind algorithm. We use the same perfor-
mance vector p to generate the local decision u
n
, ex-
cept that the a priori probability P
1
is changed from
0.2 to 0.35 at the 1000th decision. The total number
of decisions is 2000 and the simulation is repeated
1000 times. From Figure 5, it can be seen that the
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
368

0 500 1000
0
0.1
0.2
0.3
0.4
Error1
0.1096
0 500 1000
0
0.1
0.2
0.3
0.4
Error2
0.1716
0 500 1000
0
0.1
0.2
0.3
0.4
Error3
0.1253
0 200 400 600 800 1000
0
0.1
0.2
0.3
0.4
Overall Error Probability
0.0562
Figure 4: Averaged Error Probabilities over 5000 Realiza-
tions.
0 500 1000 1500 2000
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.27490.2749
0.2001
P
1
Number of decisions
P
1
is changed from 0.2 to 0.35 at the 1000th decision
Figure 5: Estimated
ˆ
P
1
when the Statistical Property of the
Signal Change.
algorithm can adapt to the changes of the unknown a
priori probability.
However, since the algorithm is based on the time-
averaging, it adapts to the changes quite slowly. To
increase the speed of the convergence, we introduce
the windowed approach. Suppose the length of the
sliding window is N
s
. At the N
i
th decision, N
i
> N
s
,
we use the previous N
s
decisions including the N
i
th
decision for estimation instead of using all N
i
deci-
sions. Figure 6 provides the numerical result of using
a sliding window of length 200. The plot shows the
averaged value of
ˆ
P
1
over 1000 realizations. The rate
of the convergence depends on the size of the slid-
ing window. As a consequence, an effort is needed
to determine an adequate window size for a particular
dynamic of the system.
3.3 Small Data Set
In Section 2.4, we propose to estimate the unknown
probabilities using the maximum likelihood estima-
tor (Liu et al., 2007) when the size of the data set
is small. Now, we present numerical comparison in
order to show the effectiveness of the ML estimator.
In Figure 7, the estimates obtained from the ML es-
0 500 1000 1500 2000
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.2004
0.3504
Number of decisions
P
1
Sliding window of 200 decisions
Figure 6: Estimated
ˆ
P
1
Using a Sliding Window.
25 50 75 100 125 150 175 200 225 250
0.07
0.08
0.09
0.1
Number of decisions
P
f
1
Analytical
ML esitimator
Figure 7: Comparison.
timator converge to its true value much faster. Note
that it is expected since the ML estimation accounts
for statistical properties of the error, while the trade
off is computationally much more complex. The term
analytical in Figure 7 means that the unknown prob-
abilities are estimated using the analytical solution of
the non-linear equation set under the assumption that
the occurrence probabilities could be replaced by the
empirical probabilities.
4 SYSTEM PERFORMANCE
WITH SURROGATE DATA
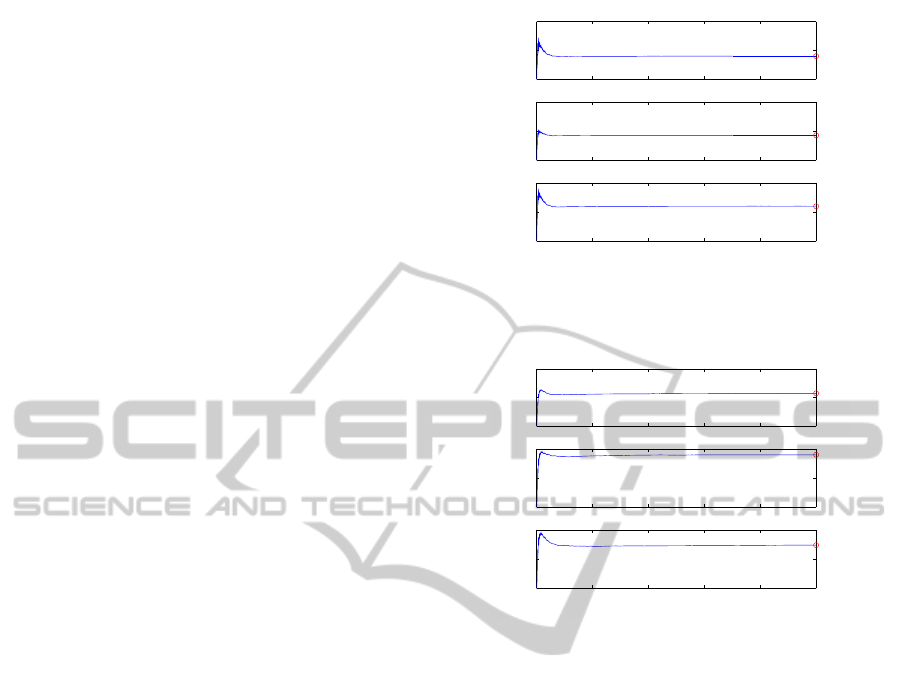
In this section, we first use the model reviewed in Sec-
tion 2.1 to simulate neonatal EEG signal. The oc-
currence rate of EEG seizure is close to 0.2 and the
length of the testing signal is about 1 hour. The gen-
erated neonatal EEG signal is fed into the local de-
tectors LD
n
, where the binary local decisions u
n
are
made. The global decision u
0
is made by applying the
blind adaptive algorithm. The unknown probabilities
of false alarm P
f
n
and missed detection P
m
n
are shown
in Figure 8 and 9, respectively. It is clear that the local
detector LD
1
is good in the sense of low false alarm
rate and the local detector LD
3
is good in the sense
NEONATAL SEIZURE DETECTION USING BLIND ADAPTIVE FUSION
369

0 200 400 600 800 1000
0
0.2
0.4
P
f
1
0.0277
0 200 400 600 800 1000
0
0.2
0.4
P
f
2
0.1372
0 200 400 600 800 1000
0
0.2
0.4
P
f
3
Number of decisions
0.1511
Figure 8: False Alarm Rate of the Local Detectors.
0 200 400 600 800 1000
0
0.5
1
P
m
1
0.8667
0 200 400 600 800 1000
0
0.5
1
P
m
2
0.3830
0 200 400 600 800 1000
0
0.5
1
P
m
3
Number of decisions
0.0272
Figure 9: Missed Detection Rate of the Local Detectors.
of low missed detection rate. It is a good numeri-
cal example to show the effectiveness of the detection
system.
In Figure 10, the upper plots shows the error
probabilities of the local detectors and the lower plot
shows the overall error probability of the system. The
distributed system has been improved by 2.3% (dif-
ference between 13.8% and 11.5%) compared with
the local detector who performs the best individually.
0 500 1000
0
0.1
0.2
0.3
0.4
Error1
0.1910
0 500 1000
0
0.1
0.2
0.3
0.4
Error2
0.1850
0 500 1000
0
0.1
0.2
0.3
0.4
Error3
0.1380
0 200 400 600 800 1000
0
0.1
0.2
0.3
0.4
Overall Error of the System
Number of decisions
0.1150
Figure 10: The Overall Error Probability of the Detection
System.
5 CONCLUSIONS
In this paper, we proposed a parallel distributed de-
tection system for neonatal seizure detection problem
using the blind adaptive fusion algorithms. The ad-
vantage of our technique is that it does not require
any a priori probabilities of the hypotheses or the per-
formance of the local detectors, which are usually un-
available in practice, especially the biomedical appli-
cations.
We first discussed two EEG models for simulat-
ing neonatal EEG signals. The first model was used
to generate synthetic data in order to evaluate the pro-
posed technique. The second model was the basics
of one of the existing detection algorithms. We also
presented three well-known neonatal seizure detec-
tion methods, each of which can be considered as a
single seizure detector.
We then described the parallel structure of the sys-
tem which enables us to combine heterogeneous de-
tectors into one system, followed by introducing its
components: the local detectors and the fusion cen-
tre. In practice, since the size of EEG data from the
patients may be limited, we consider two cases: large
data set and small data set. In the first case, we applied
the blind algorithm proposed in (Mirjalily, 2003) in
the fusion center, which solves the non-linear equa-
tion set formulated by the unknown probabilities. In
the second case, we applied the blind algorithm pro-
posed in our previous work (Liu et al., 2007), which
uses maximum likelihood estimator to estimate the
unknown probabilities. Note that since the EEG sig-
nal is non-stationary, it may require the windowed ap-
proach. Thus, the small data set may be the only op-
tion.
Further, we provided the numerical examples to
show the effectiveness and applicability of the blind
algorithms in the seizure detection application. We
performed tests for both aforementioned cases of
small and large sample sizes. We also demonstrated
the decrease of the overall probability of error of the
existing seizure detection algorithms by efficiently
fusing their decisions.
The future research will include the following top-
ics:
1. We are currently implementing the proposed lo-
cal detectors and fusion algorithm on real neona-
tal EEG data sets.
2. An effort should be made to investigate the possi-
bility of developing improved seizure detectors.
3. We can extend the hypothesis testing to allow for
more hypotheses. For example, when M = 3, the
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
370

possible hypotheses could be
H
0
: No seizure in the signal
H
1
: Seizures in the signal
H
2
: Not sure if there is seizure in the signal
4. An effort should be made to derive a statistically
optimal detector to detect the changes in phe-
nomenonor the changes in the local detectors. For
example, the adaptability shown in Figure 5 can
occur faster using such a detector.
5. By developing an algorithm for automatic count-
ing of the number of seizures, we can correlate the
frequency of seizures with the brain development
in neonates with cerebral pathologies.
REFERENCES
Celka, P. and Colditz, P. (2002). A computer-aided detec-
tion of EEG seizures in infants: asingular-spectrum
approach and performance comparison. IEEE Trans.
on biomedical engineering, 49(5):455–462.
Gotman, J. e. a. (1997). Automatic seizure detection
in the newborn: methods and initial evaluation.
Electroencephalography and clinical neurophysiol-
ogy, 103(3):356–362.
Liu, A. e. a. (1992). Detection of neonatal seizures through
computerized EEG analysis. Electroencephalography
and clinical neurophysiology, 82(1):30.
Liu, B., Jeremic, A., and Wong, K. (2007). Blind adaptive
algorithm for M-ary distributed detection. In IEEE In-
ternational Conference on Acoustics, Speech and Sig-
nal Processing, 2007. ICASSP 2007, volume 2.
Mirjalily, G. e. (2003). Blind adaptive decision fusion
for distributed detection. IEEE Transactions on
Aerospace and Electronic Systems, 39(1):34–52.
Rankine, L., Stevenson, N., Mesbah, M., and Boashash,
B. (2007). A nonstationary model of newborn EEG.
IEEE Trans. on Biomed. Eng., 54(1):19–28.
Varshney, P. (1986). Optimal data fusion in multiple sen-
sor detection systems. IEEE Trans. on Aerospace and
Electronic Systems, pages 98–101.
Volpe, J. (2001). Neurology of the newborn. WB Saunders
Co.
NEONATAL SEIZURE DETECTION USING BLIND ADAPTIVE FUSION
371
