
DYNAMIC HAND GESTURE RECOGNITION SYSTEM
USING NEURAL NETWORK
Chitralekha Mahanta, T. Srinivas Yadav and Hemanta Medhi
Department of Electronics and Communication Engineering, Indian Institute of Technology Guwahati
781039 Guwahati, India
Keywords:
MPEG-7 art shape descriptor, Radial basis function, Particle filter.
Abstract:
Vision-based hand gesture recognition enabling computers to understand hand gestures as humans do is an im-
portant technology for intelligent human computer interaction. In this paper, a recognition system for dynamic
hand gestures is proposed. In dynamic hand gesture recognition, hand is segmented by using background sub-
traction method. MPEG-7 ART based shape descriptors are used to extract spatial information. Our approach
is based on particle filter to extract trajectory features. After collecting suitable features, Radial Basis Function
neural network is used for classification. Gesture recognition rate is in the range of 80% to 98%.
1 INTRODUCTION
Gesture recognitionis an important area of research in
the field of computer vision. Gesture recognition per-
tains to recognizing meaningful expressions of mo-
tion by a human, involvingthe hands, arms, face, head
or body with the intention of conveying meaningful
information or interacting with the environment. In
addition to the theoretical aspects, any practical im-
plementation of gesture recognition typically requires
the use of different imaging and tracking devices or
gadgets.
Gestures can be static (the user assumes a cer-
tain pose) or dynamic (with prestroke, stroke, and
poststroke phases). Direct use of the hand as an
input device is an attractive method for providing
natural human computer interaction (HCI)(Pavlovic
et al., 1997). Vision-based techniques, while over-
coming this constraint, need to contend with other
problems related to occlusion of parts of the user’s
body. Vision-based devices can handle properties
such as texture and color for analyzing a gesture,
while tracking devices cannot. Vision-based tech-
niques can also vary among themselves in: the num-
ber of cameras used, their speed and latency, the struc-
ture of environment (restrictions such as lighting or
speed of movement), any user requirements (whether
user must wear anything special), the low-level fea-
tures used (edges, regions, silhouettes, moments, His-
tograms), whether 2-D or 3-D representation is used.
Gesture recognition has wide-ranging applications in
human-computer interaction, sign-language commu-
nication, video surveillance, dance/video annotations,
forensic identification and the likes.
The paper is organized as follows: In Section 2,
dynamic hand gesture recognition system is intro-
duced. Simulation results are shown in Section 3. Fi-
nally our work is concluded in Section 4.
2 DYNAMIC HAND GESTURE
RECOGNITION SYSTEM
This section is concerned with the recognition of dy-
namic hand gestures. Since the movement of the
hand conveys important information about the mes-
sage users try to communicate, in addition to the spa-
tial information, temporal features which represent
the motion of the hand are necessary for recognizing
dynamic hand gestures. The recognition strategy as
shown in Figure 1 uses a combination of static shape
recognition (performed using MPEG-7 ART shape
descriptors), particle filter based hand tracking and a
neural network based classifier. For temporal infor-
mation, the hand is tracked by using the particle fil-
ter(Ionescu et al., 2005). After obtaining temporal in-
formation, integration of tracking algorithm and neu-
ral networks is done for recognizing dynamic hand
gestures, which are varying in global motions.
253
Mahanta C., Srinivas Yadav T. and Medhi H. (2011).
DYNAMIC HAND GESTURE RECOGNITION SYSTEM USING NEURAL NETWORK.
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems, pages 253-256
DOI: 10.5220/0003299102530256
Copyright
c
SciTePress

Figure 1: Dynamic Hand Gesture Recognition System.
2.1 Preprocessing
The main aim of preprocessing is to eliminate noise
present in the captured images. Noise creates prob-
lems in hand segmentation and tracking phase, and
hence reduces the performance of the overall system.
Mostly salt and pepper noise and additive Gaussian
noise are present (Gonzalez and Woods, 2002) in the
images. These types of noises can be removed by us-
ing median filter and mean filter respectively.
We have collected 20 dynamic gestures which are
captured by using Panasonic handycam having 3.1
mega pixel picture quality and have been chosen for
our experiments. Among them, 8 are ASL gestures
and 12 are control commands. Here the preprocess-
ing is done frame by frame. Some of the dynamic ges-
tures which are collected from (Lee and Kim, 1999)
are shown in Figure 2.
2.2 Segmentation
In order to realize high-precision hand gesture recog-
nition, it is necessary that the hand region is extracted
correctly from the background. The main goal of this
step is to segment the moving hand from the back-
ground. Hand region extraction method is imple-
mented by using background subtraction algorithm.
One major advantage of this method is that it extracts
the gesture region without future frame images.
• Initialization of “Target Image” and “Back-
ground Image”. Here “Target image” is defined
as an image from which the gesture region is ex-
tracted at the present moment, “Background im-
age” is estimated by eliminating the moving ob-
ject. First, 1st frame image is used as background
image. We are going to extract the gesture region
from the images on and after 2nd frame, and thus
2nd frame image is used as the target image.
Figure 2: Gesture Moving Patterns.
• Frame Difference. Image of a candidate of the
gesture region is calculated by the following equa-
tion. The difference between the “Target image”
and “Background image” is calculated and seg-
mented, and this can be written as
F(x, y) = |T(x, y) − B(x, y)| (1)
FD(x, y) =
255 if F (x, y) ≥ Th
0 otherwise
(2)
where T(x, y) represents the Y value of the pixel
with position (x, y) in target image, B(x, y) repre-
sents the Y value of the pixel with position (x, y)
in the background image, and Th is the thresh-
old value to adjust the sensitivity of detecting the
candidate of the gesture region. In our case, the
threshold value equals to the maximum intensity
value divided by 2.
• Division of Gesture Region. The gesture image
obtained may contain other objects. But we need
only the hand part. For this, at first edge image is
calculated from the target image through the pro-
cess of edge detection. After obtaining the bound-
ary line, the image of the candidate of the gesture
region is divided into two or more regions.
• Gesture Region. Now multiply the original im-
age with the image obtained in the above step,
then the gesture region is extracted by considering
the regions in which 2/3 or more is flesh-colored
pixel. Later we have removedsmall regions which
are caused by the minute movement which is not
regarded as gesture methods which were used for
the static case. Some of the results are shown in
Figure 3
2.3 Feature Extraction
Feature extraction is a crucial module in any Com-
puter vision (CV) system. The implementation of this
module has a considerable effect on the robustness of
the system. For recognizing global hand motions, in
addition to the spatial information of the hand, tem-
poral features are also necessary. Tracking is used to
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
254
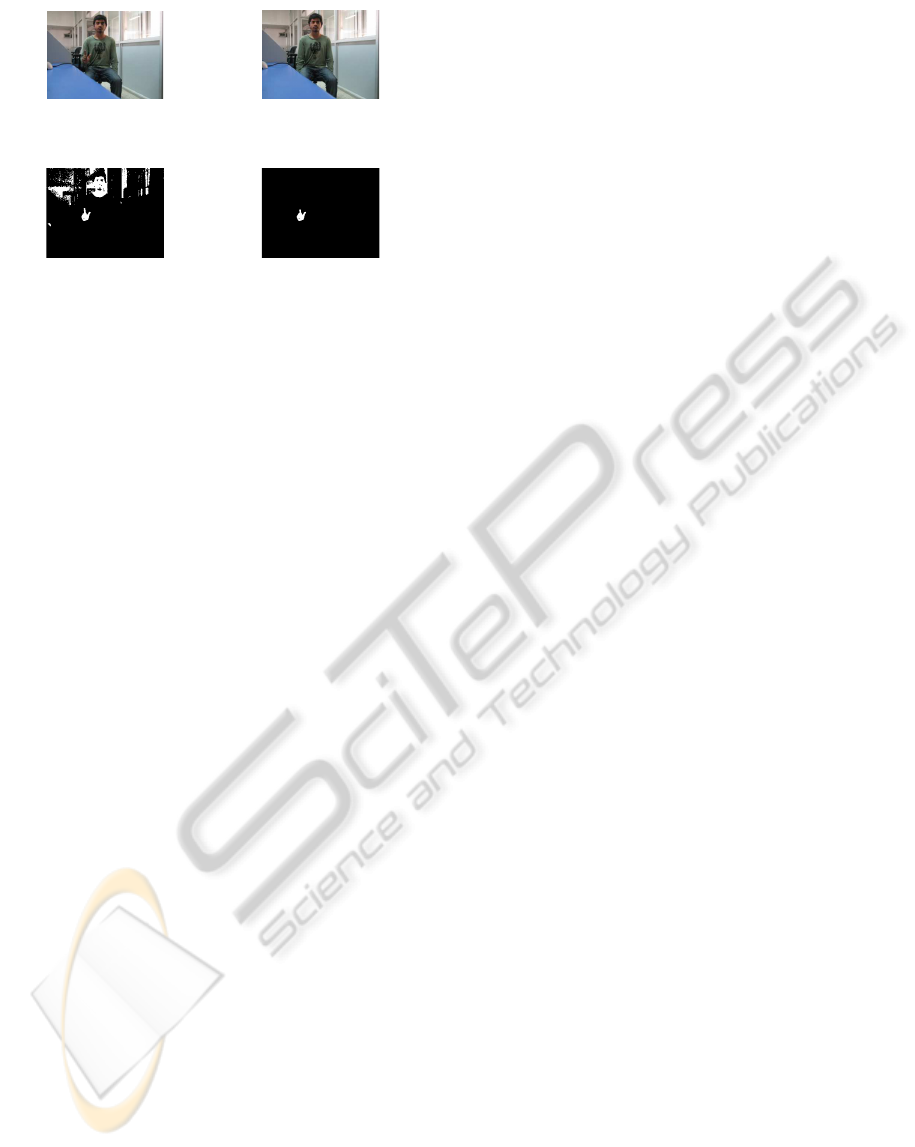
(a) Target Image. (b) Background Image.
(c) Division of Gesture re-
gion.
(d) Gesture region.
Figure 3: Different Stages of Segmentation Algorithm.
obtain these motion features of a dynamic hand ges-
ture video. It is the process of estimating the trajec-
tory of hand, as the hand moves in the area of interest.
The tracking algorithm has to estimate the state of the
system at any time instant, given a set of observations.
2.3.1 Spatial Features using MPEG-7 Shape
Descriptors (Azhar and Amer, 2008)
For spatial information, MPEG-7 ART shape descrip-
tors are used. The visual part of MPEG-7 standard
defines three descriptors with different properties: re-
gion based, contour based and 3D spectrum shape de-
scriptors.
Region based shape descriptors are used here.
These descriptors take into account all pixels consti-
tuting the shape, boundary and inner pixels. Con-
ceptually, a descriptor works by decomposing the
shape into a number of orthogonal 2-D basis func-
tions, defined by Angular Radial Transform (ART).
The MPEG-7 ART descriptor employs a complex An-
gular Radial Transformation defined on a unit disk in
polar coordinates.
2.3.2 Tracking of Hand by Particle Filters
(Arulampalam et al., 2002)
Tracking objects efficiently and robustly in complex
environment is a challenging issue in computer vi-
sion. Often dynamic image frames of these hand
regions are tracked to generate suitable features.
Particle-filtering-based tracking and its applications
in gesture recognition systems became popular very
recently. The key idea is to represent probability den-
sities by a set of samples. As a result, it has the
ability to represent a wide range of probability den-
sities, allowing real-time estimation of nonlinear,non-
Gaussian dynamic systems.
2.4 Classification and Recognition
Spatial feature vectors and features obtained from
gesture trajectory are given as input to the neural net-
work classifier to classify different dynamic gestures.
Radial basis function (RBFs) neural network(Michie
et al., 1974) is used for classification. A total of 20
dynamic hand gestures have been chosen for our ex-
periments. Among them, 8 belong to ASL gestures
and 12 belong to control commands.
A radial basis function network is an artificial neu-
ral network that uses radial basis function as the ac-
tivation function. Radial basis function (RBF) net-
works typically have three layers: an input layer, a
hidden layer with RBF activation function and an out-
put layer. The hidden units provide a set of functions
that constitute an arbitrary basis for the input patterns
(vectors) when they are expanded into the hidden-unit
space; these functions are called radial-basis func-
tions. Different types of radial basis functions could
be used, but the most common is the Gaussian func-
tion.
3 SIMULATION RESULTS
In this paper we discussed the dynamic hand gesture
recognition system using radial basis function neu-
ral network. A total of twenty dynamic hand ges-
tures have been chosen for our experiments. The
complete system works at a frame rate of about 25
frames/s. 20 dynamic gestures are captured by using
Panasonic handycam having 3.1 mega pixel picture
quality. Among them, 8 are ASL Gestures and 12 are
control commands as shown in Figure 2. The hand re-
gion is extracted by using background subtraction al-
gorithm. One major advantage of this method is that
it extracts the gesture region without future frame im-
ages. Spatial features are extracted by using MPEG-
7 shape descriptors. For temporal information, the
hand is tracked by using particle filter. Trajectory fea-
tures are extracted only for key points. Spatial and
trajectory features are combined and given as inputs
to the classifier. Radial basis function neural network
is used as classifier. 8 ASL gestures are used for test-
ing. Table 1 presents the results of different dynamic
gestures using RBFs. Table 2 presents the results of
8 ASL gesture recognition using RBFs. Recognition
rates ranged from 80% to 98%.
DYNAMIC HAND GESTURE RECOGNITION SYSTEM USING NEURAL NETWORK
255
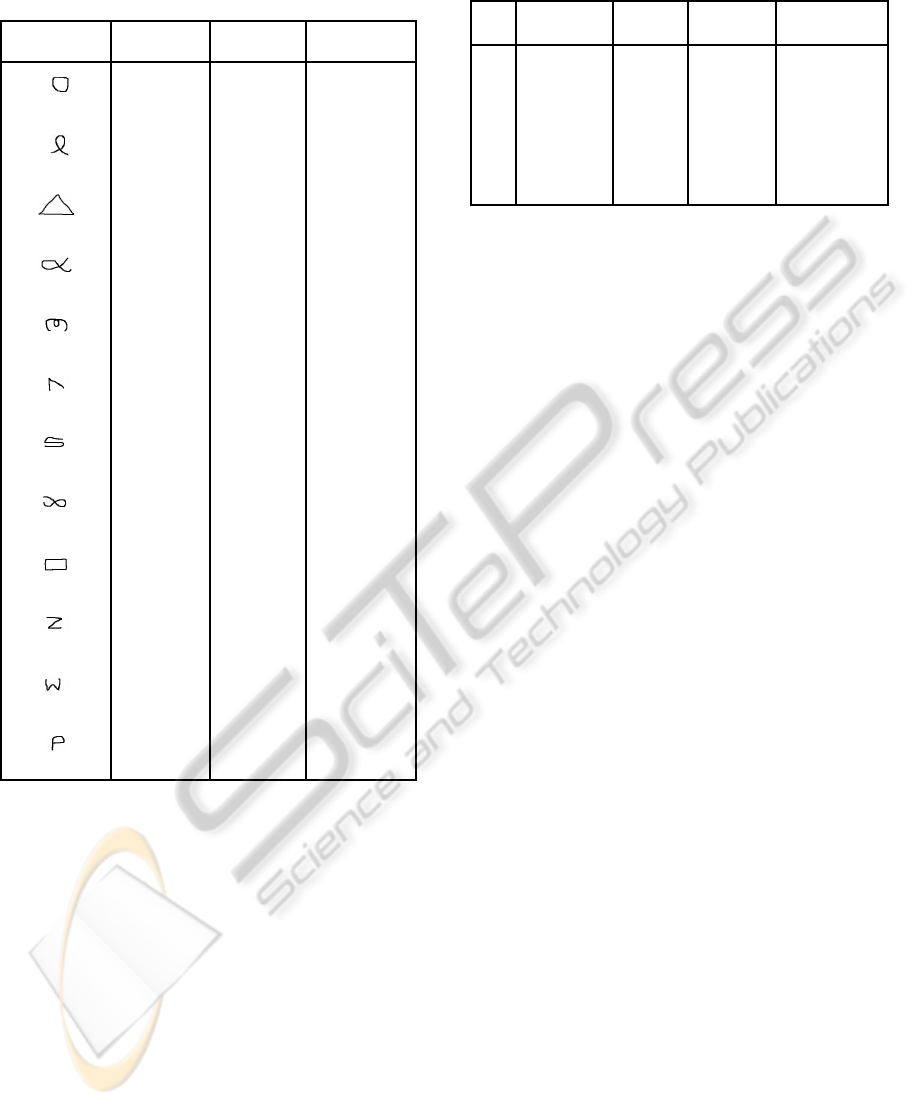
Table 1: Recognition rates(%) of dynamic gestures using
RBFs.
Moving
Pattern
No. of at-
tempts
Mis-
classified
Recognition
rate(%)
20 1 95
20 2 90
20 2 90
20 3 85
20 4 80
20 1 95
20 1 95
20 4 80
20 2 90
20 3 85
20 4 80
20 1 95
4 CONCLUSIONS
Dynamic hand gesture recognition using neural net-
work is presented in this paper. The hand region is
extracted by using background subtraction algorithm.
Video sequences are collected from a stationary cam-
era with complex backgrounds. Spatial features are
extracted by using MPEG-7 shape descriptor. Parti-
cle filter is used to track a hand under complex back-
ground. After obtaining the temporal information,
the tracking algorithm is integrated with the neural
network for recognizing the dynamic hand gestures,
which are varying in global motions. RBFs are used
for classification of different dynamic hand gestures.
Recognition rates range from 80% to 98%.
Table 2: Recognition rates(%) of ASL gestures using RBFs.
S.
No.
Gestures Classif-
ied
Mis-
classified
Recognition
rate(%)
1 East 55 1 98.18
2 Up 52 1 98.08
3 Away 48 2 95.29
4 Circle 54 1 97.14
5 Down 48 2 95.3
6 Admonish 55 1 98.18
7 Adrift 53 3 85.4
8 West 40 8 80
REFERENCES
Arulampalam, M. S., Maskell, S. S., Gordon, N., and Clapp,
T. (2002). A tutorial on particle filters for online non-
linear non gaussian bayesian tracking. In IEEE Trans.
Signal Processing.
Azhar, H. and Amer, A. (2008). Chaos and mpeg-7 based
feature vector for video object classification. In IEEE
Trans. Pattern Classification.
Gonzalez, R. C. and Woods, R. E. (2002). Digital Image
Processing. Prentice Hall of India, India, 2nd edition.
Ionescu, B., Coquin, D., and Lamber, P. (2005). Dynamic
hand gesture recognition using the skeleton of the
hand. In EURASIP Journal on Applied Signal Pro-
cessing.
Lee, H.-K. and Kim, J. H. (1999). An hmm-based thresh-
old model approach for gesture recognition. In IEEE
Trans. Pattern Analysis and Machine Intelligence.
Michie, D., Spiegelhalter, D. J., and Taylor, C. C. (1974).
Machine Learning, Neural and Statistical Classifica-
tion. Ellis Horwood.
Pavlovic, V. I., Sharma, R., and Huang, T. S. (1997). Visual
interpretation of hand gestures for human-computer
interaction: A review. In IEEE Trans. Pattern Anal-
ysis and Machine Intellegence.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
256
