
Motion Pattern Generation and Recognition
for Mobility Assessments in Domestic Environments
Thomas Frenken, Enno-E. Steen, Melina Brell, Wolfgang Nebel and Andreas Hein
OFFIS - Institute for Information Technology, Escherweg 2, D-26121 Oldenburg, Germany
Abstract. A novel approach to continuous and unobtrusive detection of motion
patterns in domestic environments is presented. Motion patterns refer to motion
primitives which can be detected via presence events emitted by ambient sen-
sors. The approach enables adaption of the system to heterogeneous environments
by building upon two pieces of information: a 2D/3D floor plan of the environ-
ment and a definition of available sensors. Using this input the system is capable
of generating all information required for the monitoring. This minimizes effort
for adaption of the system to other environments. A path-planning algorithm is
used to automatically detect possible motion patterns and their length within the
environment. A generated sensor-graph and finite state machines enable effec-
tive processing of sensor events on a common set-top-box. An experiment with
15 participants was conducted. The system is especially suitable for unobtrusive
long-term trend analysis in self-selected gait velocity and does not require direct
interaction with people monitored.
1 Introduction
The demographic change poses many problems e.g. due to the decline of the care ratio.
In the near future there will be less people paying taxes for financing the health care
system while there will be more people requiring health services. Costs due to the high
need of care of demented people [1] and by their high fall risk [2] are two of the major
factors influencing the proportionally higher costs to the health care system caused by
elderly people.
In order to meet the increased challenges on the health systems, new approaches for
delaying the need of care and for prevention of acute incidents like falls need to be
developed. Long-term monitoring of mobility may provide the required means for sup-
porting more early diagnosis and thus for initiating early prevention. This may help
saving costs while increasing perceived quality of life for people concerned. Mobility
impairments also have a high prevalence in dementia [3] and are an early indicator [4].
However, today’s health systems often can not exploit the possibilities of early diagno-
sis through mobility assessment. Today, health care professionals do most often only
get in contact with people concerned after an acute incident took place or after evidence
for a disease is already obvious to layman. Additionally, they can only assess a per-
son’s health state in a proportionally small time frame while long-term assessment may
provide more reliable and even more detailed insights. This is mainly due to missing
remote assessment possibilities in domestic environments of people. Therefore, various
Frenken T., Steen E., Brell M., Nebel W. and Hein A..
Motion Pattern Generation and Recognition for Mobility Assessments in Domestic Environments.
DOI: 10.5220/0003299400030012
In Proceedings of the 1st International Living Usability Lab Workshop on AAL Latest Solutions, Trends and Applications (AAL-2011), pages 3-12
ISBN: 978-989-8425-39-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

approaches to mobility telemonitoring or remote assessment have been developed uti-
lizing either wearable sensors or ambient sensors [5]. Nevertheless, existing approaches
have serious limitations especially regarding the monitoring of demented people and are
most often special-purpose applications which can not be used for wide-spread appli-
cation.
Within this paper we present our first work towards a system for continuous and un-
obtrusive mobility assessment in smart domestic environments. A novel approach to
configuring the system for wide-spread application in various environments with differ-
ent sensor configurations is presented. The system was implemented to work effectively
on a common set-top-box. An experiment with 15 health participants was conducted in
a living lab.
2 Medical Motivation
A person’s mobility is closely connected to his or her perceived quality of life and a
fundamental requirement for an independent lifestyle. Starting at the age of 60 years,
elderly peoples’ mobility characteristics change [6] i.e. self-selected gait velocity de-
creases each decade by 12%-16% during self-imposed activities. However, these age-
realted changes in mobility are not pathological [7]. A recent clinical study with more
than 700 healthy participants aged between 20 and 90+ years has found an average
gait velocity during a six meter walk of 1.1 m/s for people aged between 75-79 years,
decreasing by 0.1 m/s every five years [6]. Impairments of mobility due to patholog-
ical reasons lead to more significant changes in parameters of gait than age-related
changes [7]. Therefore, significant long-time changes in mobility may point to patho-
logical causes and may thus be utilized for early diagnosis [8]. Gait and balance disor-
ders have shown being related to a higher risk of falling. Especially slow self-selected
gait velocity has found being related to an increased risk for falls and need of care [9].
One of the most frequent pathological reasons for mobility impairments are neurologi-
cal diseases, especially dementia. Severity of gait and balance disorders increases with
severity of neurological disorders [10]. Mobility impairments are also an early indicator
in dementia [4]. Step-to-step variability in gait parameters of demented people seems
to be more specific and sensitive than changes in mean values of gait parameters [8].
Due to their often severe gait and balance disorders dementia patients have an increased
risk of falling [2]. From a clinical perspective long-term monitoring of changes in mo-
bility has a high-potential for early diagnosis of various diseases and for assessment
of fall risk [8]. In today’s health systems this potential is most often not exploited be-
cause technical capabilities for large-scale remote assessments don’t exist in domestic
environments.
3 State of the Art
Several approaches to mobility telemonitoring or remote assessment have been devel-
oped utilizing either wearable sensors or ambient sensors [5]. However, most wearable
sensors are not suitable for unsupervised use by layman or demented people. Wearables
require direct interaction, therefore attaching, charging, or operating the device every
4

day. Not or incorrectly donning the device heavily influences the measurements. Our
research is explicitly targeting elderly with reduced cognitive capabilities i.e. especially
demented people. Therefore, within the state of the art we focus on research whose re-
sulting systems do not require user interaction for mobility assessment.
Ambient sensors e.g. belonging to home automation or security technology systems
seem to be most suitable for long-term unobtrusive mobility assessment in domestic
environments. An approach presented by Cameron et al. [11] employs optical and ul-
trasonic sensors placed in door frames to determine the walking speed and direction of
a person passing. Pavel et al. [12] developed a system based on passive motion sensors
covering various rooms of a flat. Gait velocity could be computed by dividing known
distance between coverages by measured transition times. Placing three passive mo-
tion sensors in a sufficient long corridor makes those computations more reliable [13].
However, if using only ambient sensors in a domestic environment with more than one
person it is often difficult to correlate a sensor-event to a person triggering it. Various
approaches to solve this problem have been presented [13, 14]. Large arrangements of
pressure sensors can be used to locate a person and to monitor gait when placed un-
der the floor. Steinhage et al. [15] introduced a system based on a smart underlay with
capacitive proximity sensors consisting of conductive textiles. Since the spatial arrange-
ment of sensor is known, a person walking over the surface can be located. Recently,
more precise sensors have been employed for gait analysis in domestic environments.
Pallej
`
a et al. [16] and Frenken et al. [17] use laser range scanners to determine mobility
parameters.
Most existing approaches have in common that they are single-purpose solutions work-
ing only in predefined environments with static sensor configurations. This is mainly
caused by huge and changing environmental information in domestic environments not
being properly defined and externalized and thus by missing capabilities to automati-
cally adjust a system to changed circumstances.
domestic platformservice workstation
required input generated output
sensor
definitions
floor
plan
abstract
spatial model
sensor
graph
motion pattern
definitions
recognized
patterns
sensor
events
Fig. 1. Overall Concept of the System.
4 Approach
We present a new approach to continuous and unobtrusive detection of motion patterns
in domestic environments. The term motion pattern refers to a motion primitive such
as walking around or taking certain body positions which can be detected via presence
events emitted by ambient sensors. The approach enables adaption of the system to dif-
ferent environments by building upon two pieces of information: a 2D/3D floor plan of
5

the environment and a definition of available sensors. All other required information for
motion pattern detection is generated automatically. Recognized motion patterns can be
used to estimate the mobility of persons monitored e.g. by computing the self-selected
gait velocity.
The overall concept of the system is shown in figure 1. Building upon the required in-
formation the system generates an abstract 2D spatial model of the given environment
including only obstacles for a person’s motion. Within the abstract model a coverage
area for each available sensor is defined. Hence, recognizing a sensor-event caused by
the person monitored gives us the location (associated coverage area) of this person at a
particular time. Via a path-finding algorithm from the field of robotics, the abstract spa-
tial model is used to generate a sensor-graph which consists of the sensors as nodes and
the adjacency relations between these nodes as edges. Motion pattern definitions be-
tween adjacent sensors are generated automatically. In addition, more complex motion
patterns can be defined manually for available adjacency relations. Both, the abstract
spatial model and the sensor-graph as well as the motion pattern definitions are gener-
ated on a service workstation. The sensor-graph and the pattern definitions are trans-
ferred to a platform in the domestic environment. The platform records sensor events
and validates these via the sensor-graph. Pattern definitions are used to detect motion
patterns in a sequence of valid sensor events. Recognized motion patterns can be used
for further analysis and can be combined to create more complex motion patterns. If
sensor events violate the sensor-graph, this may indicate additional persons inside the
environment or defective sensors.
4.1 Abstract Spatial Model Generation
In order to generate the abstract spatial model, a floor plan of the domestic environment
is analyzed. A parser for the Drawing Interchange Format (DXF) format was imple-
mented. Objects recognized within the floor plan are classified into walls, openings,
considered and unconsidered spatial objects. However, the generated abstract spatial
model contains relevant objects only with their paraxial bounding boxes and relative
positions. Definitions of available sensors, which are ideally generated directly on the
domestic platform, are used to manually draw sensor coverage areas into the abstract
spatial model. The whole process is supported by a GUI. The abstract spatial model is
visualized in figure 2 which also contains explaining annotations which are not stored
within the model.
4.2 Sensor Graph Generation
Adjacency relations between sensors respectively between their coverage areas are
needed to generate the sensor-graph. Two sensors are adjacent if there is a path be-
tween the corresponding coverage areas that does not contain a coverage area of an-
other sensor. In addition, a sensor is adjacent to itself. A path-planning algorithm is
used to automatically find these relations between all available sensors within the ab-
stract spatial model. For this purpose, the system currently employs a discrete version
of the potential field method, described in [18]. While analyzing relations between two
sensors all other sensors’ coverage areas are regarded as obstacles. The abstract spatial
6

a. b.
Fig. 2. a) Visualization of the Abstract Spatial Model for the Conducted Experiment, b) Detected
Path for m6 (Brighter Fields) and Path After Smoothing Step (Line).
model is evenly divided by a grid. Each field of the grid is assigned a potential that is
the result of superposition of the attractive goal potential and the repulsive potentials
caused by existing obstacles. The attractive potential of a field is determined by com-
puting its Manhattan distance metric from the goal. The Best First Algorithm is used to
find a path.
4.3 Motion Pattern Recognition
Each motion pattern is transformed into a finite state machine. A motion pattern consists
of a start-event and an end-event. In a sequence of homogeneous events either the first
or the last occurrence of the start-event (or end-event) can be selected. Hence, there are
four different models of state machines which are parametrized. As soon as an event
has been detected on the home platform it is validated by means of the sensor-graph. A
sensor event is valid if there is an adjacency relation between the related sensor and the
sensor of the previous sensor event. Subsequently, a valid sensor event is forwarded to
every state machine instance. In case a state machine instance detects a motion pattern,
an instance of this motion pattern is created and stored for further analysis.
5 Experiment
The system was evaluated in a living lab in Oldenburg, Germany. The main objective
of the conducted experiment was to check the general applicability of the system to gait
velocity analysis in a domestic environment and to evaluate the automatic computation
of the sensor-graph and motion patterns.
A common set-top-box was employed as a platform in the domestic environment.
Software i.e. detection of available sensors, sensor event registration, sensor event val-
idation, and motion pattern detection was implemented in Java and deployed into an
OSGi framework. A common PC was used as service workstation in order to generate
and manage the abstract spatial model, create the sensor-graph, enable the definition of
motion patterns, and to visualize recognized motion patterns. A floor plan of the living
7

Table 1. Lengths of Paths Corresponding to Motion Patterns.
Motion Pattern Meas. Length [m] Comp. Length [m]
6 m-Test 6.00 5.60 (- 6.7 %)
Bathroom Door - Bedroom Door (m2) 3.61 3.39 (- 6.1 %)
Bedroom Door - Kitchen Door (m3) 4.73 4.75 (+ 0.4 %)
Kitchen Door - Refrigerator (m4, m5) 2.23 2.33 (+ 4.5 %)
Kitchen Door - Bathroom Door (m6) 4.45 4.75 (+ 6.7 %)
lab was available in DXF format.
Within the conducted experiment, performance and capacity according to the Interna-
tional Classification of Functioning, Disability and Health (ICF) from the World Health
Organization (WHO) with respect to self-selected gait velocity were determined by
the system. Capacity was measured on a six meter long, well-lighted, unobstructed, and
straight path defined by two light barriers (LB). Performance was determined on several
paths in an apartment. Light barriers and reed contacts (RC) were used. The experiment
was monitored by video. The corresponding abstract spatial model with explaining an-
notation generated from the available floor plan is shown in figure 2 a.
15 persons (three women and twelve men aged 20-42 years) participated in the exper-
iment. For this age group we expected neither significant age-related differences nor
significant differences between capacity and performance in self-selected gait velocity.
A clinical study conducted in 2009 with more than 700 people found an average capac-
ity in gait velocity for people aged 20-39 years of 1.4 m/s on a six-meter walk test [6].
Therefore, we expected similar values, too.
5.1 Methods
Nine motion patterns, two for the six-meter-test path and seven inside the apartment,
were defined. These motion patterns are shown in figure 2 a. For measuring capacity in
gait velocity, the participants were first asked to walk five times along the six-meter-test
path bidirectionally (6m-Test-LB1-LB2 and 6m-Test-LB2-LB1). After that, the exper-
iment was continued in the apartment in order to measure the performance of the par-
ticipant. Each participant entered the apartment through the entrance door and walked
into the bathroom (m1). Then he or she walked from the bathroom to the bedroom (m2)
and into the kitchen next to the refrigerator (m3 and m4). Afterwards each participant
walked back to the bathroom (m5 and m6). The loop formed by motion patterns m2 to
m6 was traversed five times by each participant. While walking, the participant were
asked to carry different things (five tissues, five apples, five soaps) from one room to
another. Hereby, adherence to paths was supported. The participants left the apartment
through the entrance door (m7) after the fifth run was finished. During the experiment,
each door inside the apartment was open.
8
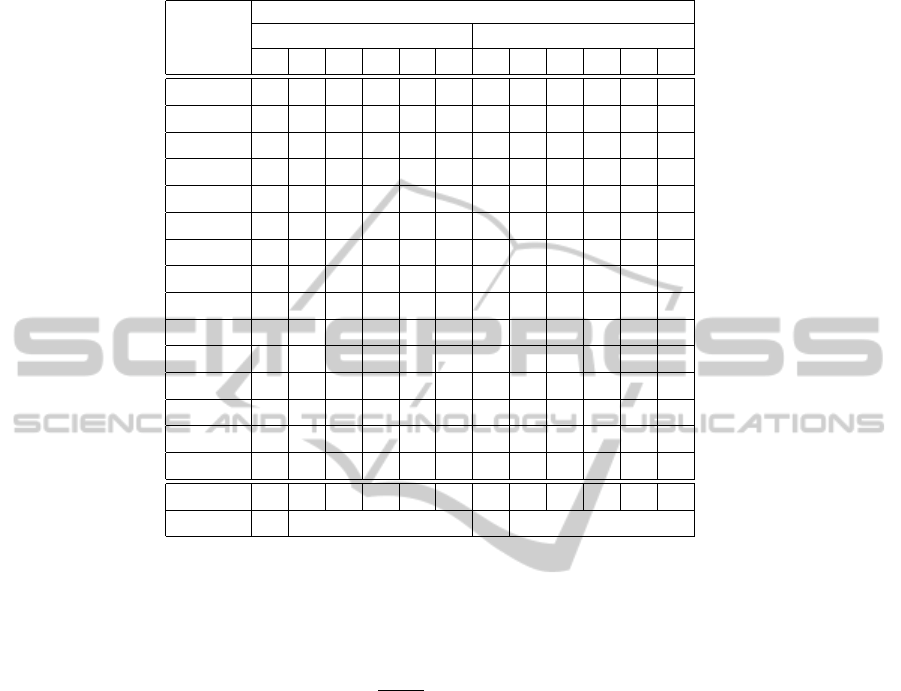
Table 2. Mean Computed Gait Velocity.
Gait Velocity [m/s]
Subject Real Distance Path-planning Distance
6 m m2 m3 m4 m5 m6 6 m m2 m3 m4 m5 m6
Male, 20 1.80 1.85 1.89 1.42 0.90 1.75 1.68 1.74 1.90 1.49 0.94 1.87
Male, 26 2.07 2.28 1.88 1.79 1.03 1.94 1.93 2.14 1.89 1.87 1.08 2.08
Male, 26 1.80 2.15 1.97 1.34 0.92 1.61 1.68 2.02 1.98 1.40 0.96 1.72
Male, 27 1.83 1.56 1.59 1.34 0.92 1.50 1.71 1.46 1.60 1.40 0.96 1.60
Male, 27 1.34 1.46 1.15 1.12 0.80 1.17 1.25 1.37 1.16 1.17 0.83 1.25
Male, 27 1.81 1.98 1.45 1.04 0.57 1.48 1.69 1.86 1.46 1.09 0.60 1.58
Male, 31 1.87 2.15 2.16 1.38 1.26 2.00 1.74 2.02 2.17 1.44 1.31 2.14
Female, 31 1.48 1.87 1.96 1.31 0.98 1.77 1.38 1.75 1.97 1.37 1.03 1.89
Female, 32 1.45 1.76 1.56 1.24 0.88 1.51 1.35 1.66 1.56 1.30 0.92 1.61
Female, 37 1.84 1.96 2.13 1.58 1.13 1.93 1.72 1.84 2.14 1.65 1.18 2.06
Male, 37 1.99 2.01 2.33 1.41 1.01 1.76 1.86 1.89 2.34 1.48 1.06 1.88
Male, 39 2.05 3.01 2.31 1.64 1.35 1.92 1.92 2.83 2.32 1.71 1.41 2.05
Male, 39 1.96 1.90 1.67 1.50 0.98 1.71 1.83 1.78 1.68 1.57 1.03 1.82
Male, 41 1.85 1.82 1.98 1.27 0.99 1.81 1.73 1.71 1.99 1.32 1.03 1.93
Male, 42 1.72 1.60 1.39 1.17 0.56 1.31 1.61 1.50 1.40 1.22 0.58 1.40
Average 1 1.79 1.96 1.83 1.37 0.95 1.68 1.67 1.84 1.84 1.43 1.00 1.79
Average 2 1.79 1.56 1.67 1.58
5.2 Results
In order to compute the self-selected gait velocity v(p, m) of the participant p, the path
length l(m) of each defined motion pattern m and the time taken t(p, m) to walk the
path is required so that v(p, m) =
l(m)
t(p,m)
. The path length can be directly computed
by utilizing the path-planning algorithm, so that the path length between two adjacent
sensor is nearly computed by simply adding the size of the grid fields passed. Addition-
ally, the lengths were directly measured in the lab. Table 1 shows a comparison between
measured and computed paths for the six-meter path and the paths of the repeated mo-
tion patterns m2 to m6.
Differences between measured and computed paths’ lengths can be explained by
the nature of the path-planning algorithm used. A value computed by the path-planning
algorithm is always a multiple of the width of a grid field (40 cm for the experiment).
Additionally, the basic path-planning algorithm only examines the 4-connected neigh-
borhood of a grid field which prohibits finding bevel paths. Therefore, in order to further
optimize the computed lengths a smoothing step is applied. Within this step 3-corner-
fields and 4-corner-fields of the computed paths are transformed into bevel joints (Fig-
ure 2 b). Within the smoothing step it may occasionally happen that bevel joints streak
(partially) blocked fields.
Table 2 shows the mean gait velocities computed for each participant on the 6-
9

meter-test path and on all repeated domestic paths (motion patterns m2 to m6). All gait
velocities are computed based on the median of the transition times and on the measured
and computed path lengths. As expected we found neither significant age-related dif-
ferences nor significant differences between capacity and performance. The arithmetic
mean over all gait velocities for the six-meter-test path is 1.79 m/s (for the measured
path length) respectively 1.67 m/s (for the computed path length). Mean gait velocity
for all domestic paths is 1.56 m/s, respectively 1.58 m/s. These values are around the
estimated gait velocity of 1.4 m/s on a six-meter walk test [6].
5.3 Discussion
One problem of this approach are changes to the environment, e.g. moving a chair,
after the abstract room model has been generated. Such changes are hard to detect.
Hints may be given by changing transition times over time which may not only point
to changes in the inhabitant personal condition but also to changes in the environment.
However, such changes would be detected during the trend analysis and might also be
a valuable hints for carers since such changes are probably affecting the inhabitants
performance and may be dangerous obstacles. Approaches like the housing enabling
concept are explicitly targeted at detecting and removing such environmental factors.
Due to the nature of the path-planning algorithm used computed path lengths and result-
ing computed self-selected gait velocity values have slight errors compared to manually
measured values. However, mobility assessment in the domestic environment is more
intended for a continuous and long-term assessment of mobility parameters. Thus detec-
tion of changes over time provide more reliable information to medical professionals
than precise single measurements which may be erroneous due to uncertain circum-
stances. Otherwise, automatic computation of path lengths enables a much broader and
time-effective application of remote mobility assessment. Some defined motion pat-
terns within the domestic environment were found being walked in significantly slower
speed than others. These patterns e.g. motion pattern m5 (walking from the refrigerator
to the kitchen door) required the probands to stand still and to turn around instead of
only walking from one to another room. The resulting low values may potentially con-
fuse medical professionals or data analysis tools. Approaches like e.g. described in [17]
provide more precise and reliable computations due to their capability to continuously
measure a proband and distinguish between times of walking and standing still.
6 Conclusions
A novel approach to continuous and unobtrusive detection of motion patterns in do-
mestic environments was presented. The approach enables adaption to heterogeneous
environments by building upon two pieces of information: a 2D/3D floor plan of the en-
vironment and a definition of available sensors. All other information required for the
monitoring is generated automatically. This may enable large-scale application. A path-
planning algorithm is used to automatically compute a sensor-graph and paths’ lengths
within the environment. The sensor-graph is used to validate sensor events and to gener-
ate basic motion patterns. The resulting motion pattern definitions are transformed into
10

finite state machines and thus enable effective detection of patterns in a series of sensor
events. Detected motion pattern instances may be used for further analysis, give hints
to or send alarms to medical professionals. The conducted experiment showed that the
system may work totally unobtrusive based exclusively on ambient sensors. The system
is especially suitable for long-term trend analysis.
Nevertheless, the system currently has some limitations. Precision of computed path
lengths may be further optimized. We are currently working on enhanced and addi-
tional path-planning algorithms which e.g. use an 8-connected neighborhood of grid
fields to directly find bevel paths. Currently, detected motion pattern instances are only
stored and transferred in a custom-made format. We are working on the storage of docu-
ments according to the Clinical Document Architecture (CDA) and on the integration of
rules for automatic alarming. The system will be installed in various flats of community
dwelling elderly late 2010.
Acknowledgements
This work was in part funded by the German Ministry of Eduction and Research within
the research project PAGE (grant 01FCO8044) and in part by the Ministry for Science
and Culture of Lower Saxony within the Research Network ”Design of Environments
for Ageing” (grant VWZN 2420).
References
1. International, A.D.: World Alzheimer Report 2009. Online (2009) http://www.alz.co.uk/
research/files/World Alzheimer Report.pdf.
2. van Doorn, C., Gruber-Baldini, A. L., Zimmerman, S., Hebel, J. R., Port, C. L., Baumgarten,
M., Quinn, C.C., Taler, G., May, C., Magaziner, J., of Dementia in Nursing Homes Re-
search Group, E.: Dementia as a risk factor for falls and fall injuries among nursing home
residents. J Am Geriatr Soc 51 (2003) 1213–1218
3. Allan, L. M., Ballard, C. G., Burn, D.J., Kenny, R. A.: Prevalence and severity of gait
disorders in Alzheimer’s and non-Alzheimer’s dementias. J Am Geriatr Soc 53 (2005) 1681–
1687
4. Verghese, J., Lipton, R. B., Hall, C. B., Kuslansky, G., Katz, M. J., Buschke, H.: Abnormality
of gait as a predictor of non-Alzheimer’s dementia. N Engl J Med 347 (2002) 1761–1768
5. Scanaill, C. N., Carew, S., Barralon, P., Noury, N., Lyons, D., Lyons, G. M.: A review
of approaches to mobility telemonitoring of the elderly in their living environment. Ann
Biomed Eng 34 (2006) 547–563
6. Butler, A. A., Menant, J.C., Tiedemann, A. C., Lord, S. R.: Age and gender differences in
seven tests of functional mobility. J Neuroeng Rehabil 6 (2009) 31
7. Imms, F. J., Edholm, O. G.: Studies of gait and mobility in the elderly. Age Ageing 10
(1981) 147–156
8. Beauchet, O., Allali, G., Berrut, G., Hommet, C., Dubost, V., Assal, F.: Gait analysis in
demented subjects: Interests and perspectives. Neuropsychiatr Dis Treat 4 (2008) 155–160
9. Montero-Odasso, M., Schapira, M., Soriano, E. R., Varela, M., Kaplan, R., Camera, L.A.,
Mayorga, L.M.: Gait velocity as a single predictor of adverse events in healthy seniors aged
75 years and older. J Gerontol A Biol Sci Med Sci 60 (2005) 1304–1309
11

10. Stolze, H., Klebe, S., Baecker, C., Zechlin, C., Friege, L., Pohle, S., Deuschl, G.: Prevalence
of gait disorders in hospitalized neurological patients. Mov Disord 20 (2005) 89–94
11. Cameron, K., Hughes, K., Doughty, K.: Reducing fall incidence in community elders by
telecare using predictive systems. In: Proc. 19th Annual International Conference of the
IEEE Engineering in Medicine and Biology Society. Volume 3. (1997) 1036–1039
12. Pavel, M., Hayes, T. L., Adami, A., Jimison, H., Kaye, J.: Unobtrusive Assessment of Mo-
bility. In: Proc. 28th Annual International Conference of the IEEE Engineering in Medicine
and Biology Society EMBS ’06. (2006) 6277–6280
13. Hayes, T. L., Pavel, M., Larimer, N., Tsay, I. A., Nutt, J., Adami, A. G.: Distributed Health-
care: Simultaneous Assessment of Multiple Individuals. 6 (2007) 36–43
14. Pavel, M., Hayes, T., Tsay, I., Erdogmus, D., Paul, A., Larimer, N., Jimison, H., Nutt, J.:
Continuous Assessment of Gait Velocity in Parkinson’s Disease from Unobtrusive Measure-
ments. In: Proc. 3rd International IEEE/EMBS Conference on Neural Engineering CNE ’07.
(2007) 700–703
15. Steinhage, A., Lauterbach, C.: SensFloor: Ein AAL Sensorsystem f
¨
ur Sicherheit, Homecare
und Komfort. In: Ambient Assisted Living, VDE-Verlag (2008) 37–42
16. Pallej
`
a, T., Teixid
´
o, M., Tresanchez, M., Palac
´
ın, J.: Measuring Gait Using a Ground Laser
Range Sensor. Sensors 9 (2009) 9133–9146
17. Frenken, T., G
¨
overcin, M., Mersmann, S., Hein, A.: Precise Assessment of Self-Selected
Gait Velocity in Domestic Environments. In: 4th International Conference on Pervasive
Computing Technologies for Healthcare 2010. (2010)
18. Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G. A., Burgard, W., Kavraki, L. E., Thrun,
S.: Principles of Robot Motion: Theory, Algorithms, and Implementations. MIT Press,
Cambridge, MA (2005)
12
