
TRIGONOMETRIC CURVE-BASED HUMAN MODELING
L. H. You
1
, X. S. Yang
1
, X. Y. You
2
and Jian J. Zhang
1
1
National Centre for Computer Animation, Bournemouth University, Dorset, U.K.
2
Faculty of Engineering and Computing, Coventry University, Coventry, U.K.
Keywords: Human modeling, Cross-section curves, Trigonometric series, Surface creation.
Abstract: In this paper, we present a modeling method to build human models. A human model is divided into
different parts. For each part, cross-section curves are created and approximated with trigonometric series.
All parts are constructed from these trigonometric curves and assembled together to create the whole human
model. Since surface creation of human models is transformed into generation of cross-sectional curves and
few design parameters are required to describe these cross-sectional curves, our approach can decrease the
data size of geometric modeling greatly and is especially suitable for reconstruction of human models from
scanned point clouds.
1 INTRODUCTION
Virtual humans are widely applied in various
situations such as computer games, virtual reality
and digital films. As pointed out by (Thalmann N.M.
and Thalmann D., 2005), in order to create realistic
and believable virtual humans, three techniques
should be developed. They are realistic appearance
modeling, realistic, smooth and flexible motion
modeling and realistic high-level behaviour
modeling.
Among them, realistic appearance achieved by
creation and deformation of human models has
attracted a lot of research attention.
In the work of (Beylot et al., 1996), the issues of
image data for extraction of 3D shapes, surface
reconstruction, topological modeling of different
anatomical elements and potential applications of
topological data base were addressed. (Scheepers et
al., 1997) considered the influence of the
musculature on exterior form, developed anatomy-
based models of muscles which responds to the
changes of the posture of an underlying articulated
skeleton, and applied them to the torso and arm of a
human figure. Modeling muscles, bones, and
generalized tissue as triangle meshes or ellipsoids,
treating muscles as deformable discretized cylinders
whose shapes change as the joints move, creating
skin by voxelizing the underlying components,
filtering, and extracting a polygonal isosurface,
(Jane and Allen, 1997) proposed an improved,
anatomically based approach to modeling and
animating animals. (Allen et al., 2002) introduced an
example-based method to capture human body
scans, estimate poses and kinematics, reconstruct a
complete displaced subdivision surface in each pose
and combine the surfaces using k-nearest-neighbors
scattered data. Based on anatomy concepts, (Nedel
and Thalmann, 1998) presented a method which
divides a human representation into three different
layers: the rigid body from a real skeleton, the
muscle design and deformation, and the skin
generation. Still using the anatomic model of
deformable human bodies consisting of skeleton,
muscles and skin, and presenting muscles by the
action lines and the muscle shape, they introduced a
mass-spring system with angular springs to
physically simulate muscle deformations (Nedel and
Thalmann, 2000). Defining the space deformed by
the control surface by a distance function around the
surface, (Singh and Kokkevis, 2000) proposed a
surface-oriented FFD which is more suitable for the
automated skinning of characters. Deriving muscle
motion and deformation from one or several action
lines and deforming each action line by a 1D mass-
spring system, (Aubel and Thalmann, 2001)
proposed a muscle model based on physiological
and anatomical considerations. Using a layered
canonical model to represent the animal's skeleton,
muscles, and skin, generating feature points to
deform the attached mesh skin representation,
(Maryann et al., 2002) studied a semi-automatic
technique for creating 3D models of creatures.
(Mohr and Gleicher, 2003) presented a framework
for extending linear blending skinning which can
capture detailed skin deformations and developed an
31
H. You L., S. Yang X., Y. You X. and Zhang J..
TRIGONOMETRIC CURVE-BASED HUMAN MODELING.
DOI: 10.5220/0003316500310038
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 31-38
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

automated method to build efficient and accurate
character skins from a set of examples. Using
motion capture and video cameras and providing a
reconstruction algorithm to solve the problems of
occlusion, hole-filling, deformation and noise-
removal, (Sand et al., 2003) examined how to
acquire deformable human geometry from
silhouettes. Taking the objective function to be
proximity of transformed vertices to the range data,
similarity between neighbouring transformations,
and proximity of sparse markers at corresponding
locations on the template and target surface, (Allen
et al., 2003) presented a new method by solving an
optimisation problem and explored its applications
in human body modeling. (Hyun et al., 2003)
represented each limb as a set of ellipsoids of
varying size, approximated these ellipsoids with a
swept ellipse, determined the difference between the
original and approximated limbs using a
displacement map, and proposed a new approach to
model and deform a human or virtual character’s
arms and legs. This work was extended to the
modeling and deformation of a whole human body,
and anatomical features are realised by a GPU-based
collision-detection procedure (Hyun et al., 2005).
(Seo and Thalmann, 2004) presented a set of
techniques to automatically generate a new human
body or modify an existing one by manipulating the
parameters provided. Using quasi-static linear
deformation model and finite element method to
calculate the deformation of chunks which represent
the internal structures of a virtual character, (Guo
and Wong, 2005) gave an approach to create skin
deformations. (Venkataraman et al., 2005)
introduced a combination of a kinematic and a
variational model to deal with the wrinkling of skin
by minimising a functional including energies for
stretching, bending and self-intersection. By
decomposing the facial meshes into the global shape
and 3D skin detail and recomposing the shape and
3D skin, (Lee and Soon, 2006) proposed a method to
reproduce the scanned model which allows to
simulate the exaggeration of the facial global shape,
retain the original skin detail and transfer 3D skin
from one to another. Using sweeps following a
simplified skeleton, (Lee et al., 2006) proposed a
new method to carry out realistic human hand
modeling and deformation which can achieve real-
time performance. (Yang and Zhang, 2006)
presented a new anatomy-based skin deformation
method which extracts major muscles automatically,
formulates muscle sliding around a joint and sliding
around a bone, develops a hybrid skin deformation
to combine the strengths of anatomy based and
smooth skinning, and is compatible with the current
animation workflow. By using the so-called curve
skeletons along with the joint-based skeletons,
(Yang et al., 2006) investigated an approach to deal
with the inherent non-linear relations between the
movement of skeletons and the caused skin shapes.
Motivated by the work of (Hyun et al., 2003,
2005) but without using standard ellipses and
displacement map, we will introduce trigonometric
series to approximate the cross-section curves of a
human body, and present a modeling method with a
small data size to build human models in this paper.
2 TRIGONOMETRIC SERIES
In the work of (Hyun et al., 2005), sweep surfaces
with an elliptic cross section have been used to
approximate human arms, legs, torso and neck, and
carry out human modeling and deformation. The
mathematical description of sweep surfaces has the
form of
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
+
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
+=
)(
)(
)(
0
)sin()(
)cos()(
)()()(
)()()(
)()()(
)()()(),(
333231
232221
131211
uz
uy
ux
vtb
vta
ururur
ururur
ururur
uvuvu
u
CERS
(1)
where
),( vuS is a sweep surface, )(uR and )(uC
stand for rotation and translation, respectively, and
)(v
u
E
is a standard ellipse of variable size.
Since the cross sections of most parts of a human
body are irregular curves. Using standard ellipses to
approximate these cross sections will bring in some
errors.
As indicated in Figure 1, we give some cross-
section curves of human torso from a human model
built with the polygon modeling approach and those
approximated by elliptic cross sections where the
curves in red indicate cross-section curves and those
in blue are from standard ellipses. It can be seen for
these images that there are noticeable differences
between the real cross-section curves and elliptic
ones.
In addition, for a certain value
0
u
of the
parametric variable
u , Eq. (1) can be written as the
following form
)()sin()()cos()(),(
)()sin()()cos()(),(
)()sin()()cos()(),(
00320310
00220210
00120110
uzvufvufvu
uyvufvufvu
uxvufvufvu
x
y
x
++=
++=
++=
S
S
S
(2)
The above equation indicates that at the plane
determined by a point
)(
0
uC
and a unit normal
vector
[
]
T
urururuN )()()()(
0330230130
= , the cross-
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
32

section curve of the sweep surface is a simple curve
which is described with two trigonometric functions
)cos(v and )sin(v .
Cross-section curves of torso
Figure 1: Comparison between real human cross-section
curves and approximated ellipses.
In order to describe the cross-section curves of a
human body more accurately, we propose to use
trigonometric series to represent cross-section
curves. With the application of more terms of
trigonometric series, the cross-section curves of a
human body can be approximated very accurately.
In the previous work (You et al., 2004),
trigonometric series has been applied to describe
blending surfaces. By degenerating the two
dimensional problems to one dimensional ones, the
trigonometric series proposed by (You et al., 2004)
can be modified to represent cross-section curves of
a human body. Assuming that a cross-section curve
is perpendicular to one of x-y, x-z and y-z plane, with
the centre
[]
T
ccc
zyx=C , and taking the one
perpendicular to x-y plane as an example, the
mathematical equation of the cross-section curve can
be written in the following trigonometric series
0
)cossin(
)sincos(
2
1
120
2
1
120
=−
++=−
++=−
∑
∑
=
−
=
−
c
j
J
j
jc
j
J
j
jc
zz
jvbjvbbyy
jvajvaaxx
(3)
where
j
a and
j
b (j=0,1,2,3,…,2J) are unknown
constants.
If there is a cross-section curve represented by a
number of discrete points
),,(
cii
zyx
(i=1,2,3,…,I),
the centre of the cross-section curve can be
determined by the average value of each component
x and y. That is
∑
∑
=
=
=
=
I
i
ic
I
i
ic
y
I
y
x
I
x
1
1
1
1
(4)
Then, we use curve fitting and the least squares
algorithm to determine the unknown constants in Eq.
(3). To this aim, we calculate the squares sum of the
errors between the curve and the trigonometric series
at the points
),,(
cii
zyx
(i=1,2,3,…,I) for x and y
position components, respectively
[
[
2
1
212
1
0
2
1
212
1
0
)cossin(
)sincos(
⎥
⎥
⎦
⎤
+−
−−=
⎥
⎥
⎦
⎤
+−
−−=
∑
∑
∑
∑
=
−
=
=
−
=
J
j
ijij
I
i
ciy
J
j
ijij
I
i
cix
jvbjvb
byyE
jvajva
axxE
(5)
The errors in Eq. (5) are minimized by setting the
derivatives of the square sums with respect to the
unknown constants to zero
)2,,3,2,1,0(
0
0
Jj
b
E
a
E
j
y
j
x
"=
=
∂
∂
=
∂
∂
(6)
which leads to the following linear algebraic
equations
),,3,2,1(
0sinsinsincos
sinsin)(
0cossincoscos
coscos)(
0sin
cos)(
11
2
11
12
1
0
1
11
2
11
12
1
0
1
11
2
11
12
1
0
1
Jk
kvjvakvjv
akvakvxx
kvjvakvjv
akvakvxx
jv
ajvaaxx
ii
J
j
I
i
jii
J
j
I
i
j
I
i
iic
I
i
i
ii
J
j
I
i
jii
J
j
I
i
j
I
i
iic
I
i
i
i
J
j
I
i
ji
J
j
I
i
j
I
i
c
I
i
i
"=
=−
−−−
=−
−−−
=
−−−−
∑∑
∑∑∑∑
∑∑
∑∑∑∑
∑∑∑∑∑∑
==
==
−
==
==
==
−
==
====
−
==
(7)
and
),,3,2,1(
0coscoscossin
coscos)(
0sincossinsin
sinsin)(
0cos
sin)(
11
2
11
12
1
0
1
11
2
11
12
1
0
1
11
2
11
12
1
0
1
Jk
kvjvbkvjv
bkvbkvyy
kvjvbkvjv
bkvbkvyy
jv
bjvbbyy
ii
J
j
I
i
jii
J
j
I
i
j
I
i
iic
I
i
i
ii
J
j
I
i
jii
J
j
I
i
j
I
i
iic
I
i
i
i
J
j
I
i
ji
J
j
I
i
j
I
i
c
I
i
i
"=
=−
−−−
=−
−−−
=
−−−−
∑∑
∑∑∑∑
∑∑
∑∑∑∑
∑∑∑∑∑∑
==
==
−
==
==
==
−
==
====
−
==
(8)
TRIGONOMETRIC CURVE-BASED HUMAN MODELING
33

Solving equations (7) and (8), respectively, we
determine all unknown constants and obtain the
mathematical representation of the cross-section
curve.
For the curve which is not perpendicular to any
coordinate planes, we must carry out the coordinate
transformation and find the mathematical description
of the curve in the local coordinate system where
one of the coordinate axes is perpendicular to the
plane containing the curve.
For some representative curves taken from
human leg and torso, we use the trigonometric series
(3) and standard ellipse
)(v
u
E
to regenerate them
and the obtained results were depicted in Figure 2
where J is defined in Eq. (3), the curve in red is the
original one, the one in green is from the algorithm
of the trigonometric series, and that in blue is
created with the equation of the standard ellipse.
J=2 J=3 J=4
a) Cross-section curve of human leg
J=3 J=7 J=10
b) Cross-section curve of human torso
Figure 2: Curve generation with different approaches.
It can be seen from these curves that the
algorithm of the trigonometric series can
approximate the cross-section curves of human body
quite well and the approximation can be greatly
improved by increasing the terms of the
trigonometric series. Since most cross-section curves
of a human body have the similar complexity to
those in this figure, the proposed approach can use
few terms to achieve high accuracy of curve
modeling.
Depending on different shapes of cross-section
curves, different terms in Eq. (3) will be used to
achieve the required accuracy. Too few terms in Eq.
(3) will cause too large errors. Too many terms will
increase the computational cost and slow down the
human modeling process. Therefore, suitable terms
should be used. In the situation of interactive
modeling, it is required to automatically find out
which value of the term J is the best. In order to
tackle this issue, here we propose the following
strategy.
First, we define an average error
a
E
and a
maximum error
M
E
below. The former is used to
measure the global approximation of the curve from
the trigonometric series to the original curve and the
latter quantifies the maximum difference between
the curve from the trigonometric series and the
original curve.
∑
=
=
I
i
i
i
a
d
d
I
E
1
1
(9)
and
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
J
J
M
d
d
d
d
d
d
d
d
E ,,,,max
3
3
2
2
1
1
"
(10)
where
()( )
)cossin(
)sincos(
2
1
120
2
1
120
22
22
iji
J
j
jciyi
iji
J
j
jcixi
cicii
yixii
jvbjvbbyyd
jvajvaaxxd
yyxxd
ddd
+−−−=
+−−−=
−+−=
+=
∑
∑
=
−
=
−
(11)
Then, we set different errors to determine the
required terms in Eq. (3). For example, we take the
average error and maximum error not more than 1%
and 5%, respectively. That is
%5
%1
≤
≤
M
a
E
E
(12)
A linear interpolation operation is employed to
find out the suitable terms efficiently. Initially, we
take J=3 and J=10, and calculate the average errors
3a
E
and
10a
E
and the maximum errors
3m
E
and
10m
E
where the subscripts 3 and 10 stand for the
values of J. If both
3a
E
and
3m
E
have met Eq. (12),
or one of
10a
E
and
10m
E
does not satisfy Eq. (12), a
linear extrapolation operation is used to find a
smaller
1
J
for the former and a larger
1
J
for the
latter. Otherwise, a linear interpolation is applied to
calculate the
1
J
between J=3 and J=10. The
obtained
1
J
is usually not an integer. We round off
it to the nearest integer. With
1
J
, we calculate the
average errors
1
aJ
E and the maximum errors
1
mJ
E
and examine whether they have met Eq. (12). If both
1
aJ
E and
1
mJ
E have met Eq. (12) and
3
1
<J
, the
linear extrapolation operation occurs with
1
J
and
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
34

J=3. If one of
1
aJ
E and
1
mJ
E does not satisfy Eq.
(12) and
10
1
>J
, the linear extrapolation operation is
performed with J=10 and
1
J
. If both
1
aJ
E and
1
mJ
E
have met Eq. (12) and
103
1
<< J
, the linear
interpolation operation is conducted between J=3
and
1
J
. If one of
1
aJ
E and
1
mJ
E does not satisfy Eq.
(12) and
103
1
<< J
, the linear interpolation
operation is carried out between
1
J
and J=10.
Since there are two quantities
a
E
and
m
E
which
can be employed for the interpolation, we must
determine which one should be used. Obviously, if
only one of
a
E
and
m
E
does not meet Eq. (12), this
error is used for the interpolation. If both of them do
not satisfy Eq. (12), we always use the average error
for the interpolation since the average error is a
global measurement of the difference between the
original curve and that from the trigonometric series.
3 HUMAN PARTS DEFINED
WITH TRIGONOMETRIC
SERIES
In order to build a human model, we draw some
cross-section curves which define the human
profiles. Then we approximate the original cross
sections with the trigonometric series. After that, we
construct surface patches from the curves generated
using the trigonometric series with the following
treatment.
As mentioned by (Tokuyama, 2000), among
three surface interpolation methods, i. e.,
interpolating through distinct point data, skinning
over a family of curves and interpolating the surface
simultaneously over two families of intersection
curves, the skinning method is generally considered
to be the most frequently used technique for surface
construction. Here we use this skinning method to
construct surface patches of human parts.
If a surface patch will be constructed from K
curves determined with the trigonometric series
))(),(),(( vcvcvc
zkykxk
(k=0,1,2,3,…,K-1) where
)(vc
xk
, )(vc
yk
and )(vc
zk
are determined by Eq. (3),
we use the following equation to describe the
surface to be constructed
),,(
)(),(
1
0
zyxt
vfuvut
tm
K
m
m
=
=
∑
−
=
(13)
where
)(vf
tm
(m=0,1,2,3,…,K-1) are unknown
functions.
Uniformly dividing the region u=0 to u=1 into
K-1 equal intervals which gives the interval length to
be
)1/(1 −= Kdu , we have
duku
k
×=
(k=0,1,2,3,…,K-1). The unknown functions
)(vf
tm
(m=0,1,2,3,…,K-1) can be determined by
solving the following linear algebraic equations
),,;1,,3,2,1,0(
)()(
1
0
zyxtKk
vfuvc
tm
K
m
m
ktk
=−=
=
∑
−
=
"
(14)
Expanding Eq. (14) and rewriting it into the form
of matrix, we obtain the following mathematical
expression
[
]
{
}
{
}
)()()( vvuR
ttkmt
CF =
(15)
where
[
]
)(
kmt
uR
is a
K
K
× square matrix with the
elements
m
kkm
uu = (k=0,1,2,…,K-1; m=0,1,2,…,K-
1),
{
}
[
]
T
tKtttt
vfvfvfvfv )()()()()(
1210 −
= "F and
{
}
[
]
T
tKtttt
vcvcvcvcv )()()()()(
1210 −
= "C are two
vectors with K elements.
Using
[
]
1
)(
−
kmt
uR to indicate the inverse matrix
of
[
]
)(
kmt
uR
and left multiplying both sides of Eq.
(15) by this inverse matrix, we obtain the unknown
functions with the following equation
{
}
[
]
{}
)()()(
1
vuv
tkmtt
CRF
−
=
(16)
At the boundary curves where two different
surface patches are to be connected together, we
must consider the continuity between the two
surface patches. For an existing surface patch
indicated by Eq. (13), different order continuities
such as the boundary tangents and boundary
curvature etc. at its boundaries can be determined
from the different orders of partial derivatives
n
n
u
vut
∂
∂ ),(
(n=1,2,3,…) of the surface patch with
respect to the parametric variable u. By introducing
these partial derivatives into the above operation,
different order continuities between two connected
surface patches can be obtained.
For example, if we intend to connect two surface
patches with the tangent continuity at u=1 of the
existing surface patch
),( vut , we obtain the
mathematical expressions of the first partial
derivative
∑
−
=
=
=
⎥
⎦
⎤
⎢
⎣
⎡
∂
∂
1
1
1
)(
),(
K
m
tm
u
vfm
u
vut
of the existing
TRIGONOMETRIC CURVE-BASED HUMAN MODELING
35
surface patch
),( vut
and
)(
),(
1
0
vf
u
vut
t
u
=
⎥
⎦
⎤
⎢
⎣
⎡
∂
∂
=
of the
unknown surface patch
),( vut with respect to the
parametric variable u from Eq. (13), respectively.
Then the following tangential continuity constraint
is added to Eq. (14).
),,(
)()(
1
1
1
zyxt
vfmvf
K
m
tmt
=
=
∑
−
=
(17)
Since one more linear algebraic equation is
introduced, the unknown functions
)(vf
tm
in Eq.
(13) should be increased from
)(
1
vf
tK −
to
)(vf
tK
and all K in Eq. (13) and thereafter will be replaced
by (K+1).
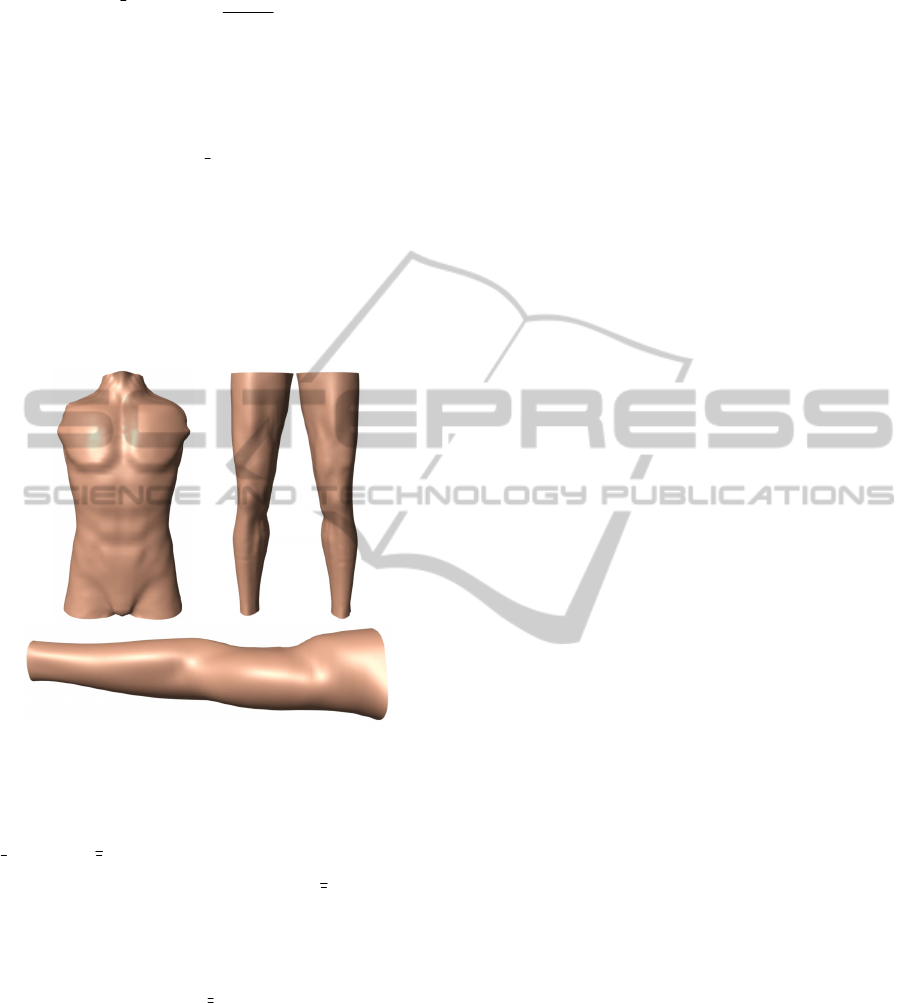
Figure 3: Human torso, legs and arm created from the
trigonometric series.
If both opposite edges of a surface patch ),( vut
will be connected to two separate surface patches
),( vut and ),( vut , the continuity at the boundary
curve u=0 of the exiting surface patch
),( vut should
also be considered. Similar to the above treatment,
the following boundary condition for the tangential
continuity will be added to Eq. (14)
),,(
)()(
1
1
1
zyxt
vfvmf
t
K
m
tm
=
=
∑
−
=
(18)
and the unknown functions
)(vf
tm
in Eq. (13) will be
increased to
)(
1
vf
tK +
and all K in Eq. (13) and
thereafter will be replaced by (K+2).
With the above constructed surface function, we
create human torso, legs and arms from the
trigonometric series as demonstrated in Figure 3.
4 ASSEMBLY OF HUMAN PARTS
BY SURFACE BLENDING
After successful construction of human parts
including human torso, arms, and legs, the
remaining task is how to assemble them together
which maintains smooth transition between different
human parts and ensures the surface in the transition
region has the realistic appearance of the human
part.
There are two approaches which can be used to
achieve this aim: one is surface blending (Zhang and
You, 2004) and the other is local extrusion
deformation (You and Zhang, 2003). Here we take
the connection between human torso and right arm
as an example to explain the operation of surface
blending.
Firstly, we determine the boundary curves and
boundary tangents of the surface which will
smoothly connect human right arm to torso together.
According to the position function of the surface
patch at the leftmost end of the right arm, we can
determine the right boundary curve and boundary
tangent of the transition surface. In order to
determine the left boundary curve and boundary
tangent of the transition surface, we create a cross-
sectional curve on the human torso near the left end
of the right arm and calculate the tangent of the
human torso at this curve. Then, we construct the
transition surface with these boundary curves and
boundary tangents. We can change the size of the
boundary tangents to change the shape of the
transition surface and to make the transition surface
look more realistically. If the manipulation of the
boundary tangents does not reach the required
realism, we add one or more cross-section curves
between the two boundary curves and create the
transition surface from two boundary curves, two
boundary tangents and the in-between curves. With
such a method, we connect two different parts
together. The top image of Figure 4 gives two
human parts: right arm and torso, and the bottom
image shows these two human parts have been
smoothly connected together. With the same
treatment, we also connected the left arm to the
torso.
For the connection between the human torso and
legs, we first use a surface to close the bottom
opening of the human torso. Then we determine
boundary curves and tangents of the torso
corresponding the right and left legs, respectively.
And finally, the above method is employed to
produce the transition surfaces between the three
human parts.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
36

Figure 4: Connection of different human parts.
In Figure 5, we gave a human model built with
our proposed approach.
The approach presented in this paper greatly
lowers the data size of geometric modeling. For the
human body given in the following figure, the
modeling with the polygon approach uses 6457
vertices with total 14371 design parameters to create
the model. With our method, only 6510 design
parameters are required to build it.
Figure 5: Human model assembled from different human
parts.
5 CONCLUSIONS
Human modeling can be performed with NURBS,
polygon and subdivision. These approaches are
effective and popular. However, they involve a lot of
design parameters. In order to reduce design
parameters, we present a new modeling method to
build human models.
The method starts from cross-sectional curves of
a human body. With introduction of trigonometric
series, these cross-sectional curves are approximated
very accurately. Then human parts are constructed
from the curves generated with the trigonometric
series. We examined how to construct human parts
from these trigonometric curves and demonstrated
that surface patches produced with our proposed
approach can maintain the required continuities
between two adjacent patches. Finally, we discussed
the assembly issue of human models.
Unlike the sweep-based human modeling, our
method can represent cross-sectional curves of
human body very accurately. Due to this reason, the
treatment to improve the modeling realism using
some approaches such as displacement map is not
required.
Our proposed approach greatly reduces design
parameters of human modeling. It is especially
suitable for reconstruction of human models from
scanned point clouds.
REFERENCES
Allen, B., Curless, B., Popović, Z., 2002. Articulated body
deformation from range scan data. In Proceedings of
the 2002 Conference on Computer Graphics,
SIGGRAPH, ACM Press, 173-180.
Allen, B., Curless, B., Popović, Z., 2003. The space of
human body shapes: reconstruction and
parameterization from range scans. ACM Transactions
on Graphics 22(3), 587-594.
Aubel, A., Thalmann, D., 2001. Interactive modeling of
the human musculature. In Proceedings of Computer
Animation, Institute of Electrical and Electronics
Engineers Inc., 167-173.
Beylot, P., Gingins, P., Kalra, P., Thalmann, N. M.,
Maurel, W., Thalmann, D., Fasel, J., 1996. 3D
interactive topological modeling using visible human
dataset. EUROGRAPHICS ’96 and Computer
Graphics Forum 15(3), 33-44.
Guo, Z., Wong, K. C., 2005. Skinning with deformable
chunks. EUROGRAPHICS 2005 and Computer
Graphics Forum 24(3), 373-381.
Hyun, D.-E., Yoon, S.-H., Kim, M.-S., Jüttler, B., 2003.
Modeling and deformation of arms and legs based on
ellipsoidal sweeping, In Proceeding s of 11
th
Pacific
Conference on Computer Graphics and Applications,
IEEE Computer Society, 204-212.
Hyun, D.-E., Yoon, S.-H., Chang, J.-W., Kim, M.-S.,
Jüttler, B., 2005. Sweep-based human deformation.
The Visual Computer 21, 542-550.
TRIGONOMETRIC CURVE-BASED HUMAN MODELING
37

Jane, W., Allen, V. G., 1997. Anatomically based
modeling, In Proceedings of the 1997 Conference on
Computer Graphics, SIGGRAPH, ACM Press, 173-
180.
Lee, W.-S., Soon, A., 2006. Facial shape and 3D skin.
Computer Animation and Virtual Worlds 17, 501-512.
Lee, J., Yoon, S.-H., Kim, M.-S., 2006. Realistic human
hand deformation. Computer Animation and Virtual
Worlds 17, 479-489.
Maryann, S., Jane, W., Allen, V. G., 2002. Model-based
reconstruction for creature animation. In Conference
Proceedings on ASM SIGGRAPH Symposium on
Computer Animation, Institute of Electrical and
Electronics Engineers Inc., 139-146.
Mohr, A., Gleicher, M., 2003. Building efficient, accurate
character skins from examples. ACM Transactions on
Graphics 22(3), 562-568.
Nedel, L., Thalmann, D., 1998. Modeling and deformation
of human body using an anatomically-based approach.
In Proceedings of the Computer Animation. IEEE
Computer Society, 34-40.
Nedel, L., Thalmann, D., 2000. Anatomic modeling of
deformable human bodies. The Visual Computer 16,
306-321.
Sand, P., McMillan, L., Popović, J., 2003. Continuous
capture of skin deformation. SIGGRAPH 2003 and
ACM Transactions on Graphics 22(3), 578-586.
Scheepers, F., Parent, R. E., Carlson, W. E., May, S. F.,
1997. Anatomy-based modeling of the human
musculature. In Proceedings of the 24
th
Annual
Conference Computer Graphics and Interactive
Techniques, ACM Press/Addison-Wesley Publishing
Co., 163-172.
Seo, H., Thalmann, N. M., 2004. An example-based
approach to human body manipulation. Graphical
Models 66, 1-23.
Singh, K., Kokkevis, E., 2000. Skinning character using
surface-oriented free-form deformations. In
Proceedings of Graphics Interface, 2000. Canadian
Information Processing Soc., 35-42.
Thalmann, N. M., Thalmann, D., 2005. Virtual humans:
thirty years of research, what next? The Visual
Computer 21, 997-1015.
Tokuyama, Y., 2000. Skinning-surface generation based
on spine-curve control. The Visual Computer 16, 134-
140.
Venkataraman, K., Lodha, S., Raghavan, R., 2005. A
kinematic-variational model for animating skin with
wrinkles. Computers & Graphics 29, 756-770.
Yang, X. S., Zhang, J. J., 2006. Automatic muscle
generation for character skin deformation. Computer
Animation and Virtual Worlds 17, 293-303.
Yang, X. S., Somasekharan, A., Zhang, J. J., 2006. Curve
skeleton skinning for human and creature characters.
Computer Animation and Virtual Worlds 17, 281-292.
You, L. H., Zhang, J. J. 2003. Fast generation of 3-D
deformable surfaces. IEEE Transactions on Systems
Man and Cybernetics: Part B-Cybernetics 33(4), 616-
625.
You, L. H., Comninos, P., Zhang, J. J., 2004. PDE
blending surfaces with C
2
continuity. Computers and
Graphics 28(6), 895-905.
Zhang, J. J., You, L. H., 2004. Fast surface modeling
using a 6th order PDE. Computer Graphics Forum
23(3), 311-320.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
38
