
A STUDY ON REAL-TIME RESPONSIVENESS
ON VIRTUALIZATION BASED MULTI-OS
EMBEDDED SYSTEMS
Yuki Kinebuchi, Hitoshi Mitake, Yohei Yasukawa, Takushi Morita
Alexandre Courbot and Tatsuo Nakajima
Department of Computer Science and Engineering, Waseda University, Tokyo, Japan
Keywords: Embedded and Real-Time Systems, Multi-core processors, Virtualization Techniques.
Abstract: Despite the strong requirement of supporting deterministic real-time scheduling on virtualization based
multi-OS embedded systems, which enables co-location of a real-time operating system and a general-
purpose operating system on a single device, there are few investigations in the real-world hardware. In this
paper we introduce our virtualization layer called SPUMONE, which runs on single-core and multi-core
SH-4A processors. SPUMONE achieves the low overhead, and requires a small amount of engineering
efforts to modify guest OS kernels for executing on SPUMONE. SPUMONE now can execute the
TOPPERS real-time OS and Linux as a general-purpose OS concurrently on a single embedded platform. In
addition we propose two techniques to mitigate the interference of Linux to the real-time responsiveness of
RTOS. The first technique leverages the interrupt priority level mechanism supported by the SH-4A
processor. The second is the proactive migration of a virtual core among physical cores to prevent the Linux
kernel activity from blocking the interrupts assigned to RTOS. The evaluation shows that our techniques can
decrease the interrupt latency of RTOS entailed by Linux. In addition, sharing a physical core between
RTOS and Linux will increase total processor utilization.
1 INTRODUCTION
Modern embedded systems like cell-phones and
digital home appliances are rapidly enhancing their
functionality, getting competitive with desktop
systems. However there are some embedded system
specific requirements for real-time control
processing, which is difficult to be supported by
general-purpose operating systems.
Therefore, constructing an embedded device with
a real-time operating system (RTOS) and a general-
purpose operating system (GPOS) has been attracted
as an approach to let embedded devices balance real-
time responsiveness and rich functionalities. There
are various approaches to satisfy the above
requirement. One of the approaches is to use a multi-
core SoC typically equipped with two independent
processors, one for RTOS and the other for GPOS.
Another approach is to use the hybrid system
(Mantegazza, 2000); (Takada, 2002); (Yodaiken,
1999) which executes GPOS as a task of RTOS.
In this paper, we focus on virtualization
technologies, originally widely used in enterprise
servers and desktop computers. Now, embedded
systems are attractive target as a new research field
of virtualization technologies (Heiser, 2008).
Embedded systems require different characteristics
and gives some new challenges that have not been
discussed in the previous research fields of
virtualization technologies. According to the
discussions in (Armand, 2009), the requirements to
the embedded system hardware virtualization are:
i. To require minimal or no modification to OS
kernels and their applications.
ii. To let OSes to reuse their native device
drivers.
iii. To support the real-time responsiveness in
order to maintain the real-time property of
RTOS.
Virtualization technologies for enterprise servers
and desktop systems, like VMware (http://www.
vmware.com/) and Xen (Barham, 2003), do not
369
Kinebuchi Y., Mitake H., Yasukawa Y., Morita T., Courbot A. and Nakajima T..
A STUDY ON REAL-TIME RESPONSIVENESS ON VIRTUALIZATION BASED MULTI-OS EMBEDDED SYSTEMS .
DOI: 10.5220/0003319903690378
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2011), pages
369-378
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

fulfill these requirements. Especially the third
requirement is difficult to be supported by traditional
virtualization technologies. Because the virtual
memory virtualization and the I/O virtualization
require complex manipulation of data structures
inside virtualization layers, they require to
synchronize the data structures, and make the
virtualization layer complex. Therefore, we need to
develop virtualization layers specialized for
embedded systems. In our approach, we have
developed our own virtualization layer for
embedded devices and evaluated its real-time
responsiveness.
There are three contributions introduced in this
paper.
• The first contribution is an OS consolidation
methodology which fits the requirements of
embedded systems. The evaluation shows that
the basic overhead and engineering cost
required to the guest OSes are significantly
smaller compared with other solutions.
• The second contribution is an investigation on
the real-time properties of the virtualization
technology for embedded devices. Despite the
growth of real-time virtualization
technologies, their real-time properties have
not been sufficiently discussed.
• The last contribution is to propose two
techniques for decreasing the latency
introduced to RTOS. The first technique is to
leverage the interrupt priority level (IPL)
mechanism to enable RTOS to preempt a
GPOS’s critical section at any time. The other
is to migrate virtual cores among physical
cores, when they enter into a critical section,
in order to prevent GPOS kernel activities to
block the execution of RTOS.
We have developed a thin virtualization layer
called SPUMONE which enables the co-execution
of multiple OSes on a single-core processor and
multi-core processor equipped with the SH-4A
architecture cores. SPUMONE can co-execute
TOPPERS RTOS (TOPPERS is a RTOS which
meets μITRON RTOS specification widely used in
Japanese industry) and Linux. The evaluation shows
that our approach improves the real-time
responsiveness significantly. Also, our evaluation
shows that the tradeoffs between the proposed
techniques that offer a guideline to consider which
technique is appropriate for respective target
domains.
The rest of the paper is structured as follows. In
Section 2, we show the design and implementation
of SPUMONE. Section 3 proposes two techniques to
reduce interrupt latency. Section 4 presents the
evaluation showing the effectiveness of the proposed
approach. In Section 5, we show related work, and
finally, we conclude the paper in Section 6.
2 DESIGN AND
IMPLEMENTATION
This section introduces our methodology for
accommodating multiple OSes on the top of a single
embedded device. The methodology is based on a
thin virtualization layer called SPUMONE and some
modifications to guest OS kernels.
Figure 1: SPUMONE based system on a single-core
processor.
Figure 2: SPUMONE based system on a multi-core
processor.
2.1 Light-weighted Virtualization
Layer: for Embedded Systems:
SPUMONE
SPUMONE (Software Processing Unit,
Multiplexing ONE into two or more) is a thin
software layer for multiplexing a single physical
processor into multiple virtual processors. In other
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
370

words, SPUMONE provides a virtual multi-core
processor interface on the top of a physical single-
core processor. Unlike typical virtualization layers,
SPUMONE itself and guest OS kernels are executed
in the privileged address space as shown in Fig. 1, in
order to simplify the system design and to eliminate
the overhead of cross domain calls between the user
and kernel mode for invoking system-calls and
hypercalls. If an OS does not leverage privilege
levels, its applications will be executed in the kernel
mode altogether. Executing OS kernels in the user
mode is known to complicate the implementation of
the virtualization layer, because all privileged
instructions need to be emulated.
In SPUMONE, the majority of the kernel
instructions, including the privileged instructions,
are executed directly by the real processor, and only
a minimal set of instructions are emulated by
SPUMONE. The emulated instructions are invoked
from the OS kernels using simple function calls.
Since the interface has no binary compatibility with
the original processor interface, we simply modify
the source code of OS kernels, a method known as
the para-virtualization. Thus we assume that we have
the access to the source code of the OS kernels.
However, the modifications of OS kernels are very
small as described in Section 2.2.
SPUMONE assumes to use an SMP (Symmetric
Multiprocessing)-based multi-core processor. All
codes and data for applications and guest OS kernels
reside in the shared memory. SPUMONE for multi-
core processors is designed in a distributed model: a
dedicated instance of SPUMONE is assigned to each
physical core as shown in Fig. 2. This design is
chosen in order to eliminate the unpredictable
overhead of synchronization among multiple
processor cores. In addition, the basic lock
mechanism can be easily shared between the single-
core and multi-core version. The approach simplifies
the design of SPUMONE. It also enables the system
to scale on multi-core and many-core processors as
discussed in (Baumann, 2009).
2.1.1 Interrupt/Trap Delivery
Interrupt virtualization is a key feature of
SPUMONE. Interrupts are intercepted by
SPUMONE before they are delivered to each guest
OS. When SPUMONE receives an interrupt, it looks
up the interrupt destination table to make a decision
to which OS it should be delivered. The destination
virtual processor is statically defined for each
interrupt source when the OS kernels are built. Traps
are also delivered to SPUMONE first, then are
directly forwarded to the currently executing OS.
To let SPUMONE receive interrupts before the
OSes, we modified the interrupt entry point of the
OS kernels to the SPUMONE’s vector table. The
entry point of each OS is notified to SPUMONE via
a virtual instruction for registering their vector table.
An interrupt is first examined by the SPUMONE’s
interrupt handler in which the destination virtual
processor is decided and the corresponding
scheduler is invoked. When the interrupt triggers OS
switching, all the registers of the current OS are
saved into the register stack, then the register stack
for the previous OS is restored. Finally, the
execution branches into the entry point of the
destination OS. The processor registers are setup just
as the real interrupt is occurred, so the source code
of the OS entry points does not need to be modified.
The interrupt delivery process on a multi-core
platform works basically as same as the one on a
single-core platform. Each SPUMONE instance
delivers interrupts to their destinations. On a multi-
core system, virtual cores may migrate among
physical cores. In order to deliver interrupts to a
virtual core running on a different core, the
assignments of interrupts and physical cores are
switched along with the virtual core migration.
2.1.2 Virtual Processor Scheduling
A processor is multiplexed by scheduling the
execution of OSes. The execution states of the OSes
are managed by data structures that we call virtual
processors or virtual cores. When switching the
execution of the virtual processors, all the hardware
registers are stored into the corresponding virtual
processor’s register table, and then restored from the
table of the next executing virtual processor. The
mechanism is similar to the process implementation
of a typical OS, however the virtual processor saves
the entire processor state, including the privileged
control registers.
The scheduling algorithm of virtual processors is
the fixed priority preemptive scheduling. When
RTOS and GPOS share the same physical core, the
virtual processor bound to RTOS would gain a
higher priority than the virtual processor bound to
GPOS in order to maintain the real-time
responsiveness of RTOS. This means that GPOS is
executed only when the virtual processor for RTOS
is in an idle state and has no task to be executed. The
process scheduling is left up to OSes so the
scheduling model for each OS is not changed. Idle
RTOS resumes its execution when it receives an
A STUDY ON REAL-TIME RESPONSIVENESS ON VIRTUALIZATION BASED MULTI-OS EMBEDDED
SYSTEMS
371

interrupt. The interrupt for RTOS preempts GPOS
immediately, even if GPOS is disabling its
interrupts.
When virtual cores assigned to GPOS are
migrated to be executed on a shared core, those
cores are scheduled with the timesharing scheduler.
2.1.3 Inter-core Communication
Communications among SPUMONE instances
running on their physical cores are implemented
with the shared memory area and the inter-core
interrupt (ICI) mechanism. First, a sender stores data
on a specific memory area, then it sends an interrupt
to a receiver, and the receiver copies the data from
the shared memory.
2.2 Modifying OS Kernels
Each guest OS is modified to be aware of the
existence of the other guest OS, because hardware
resources other than the processor are not
multiplexed by SPUMONE. Thus those are
exclusively assigned to each OS by reconfiguring or
by modifying their OS kernels. The following
describes the points of the OS kernels to be modified
in order to run on the top of SPUMONE.
Interrupt Vector Table Register Instruction.
The instruction registering the address of a vector
table is replaced to notify the address to the
SPUMONE’s interrupt manager. Typically this
instruction is invoked once during
the OS
initialization.
Bootstrap.
In addition to the features supported by the single-
core SPUMONE, the multi-core version provides the
virtual reset vector device, which is responsible for
resetting the program counter of the virtual core that
resides on a different core.
Physical Memory.
A fixed physical memory area is assigned to each
guest OS. The physical address for the OSes can be
simply changed by modifying the configuration files
or their source codes. Virtualizing the physical
memory would increase the size of the virtualization
layer and the substantial performance overhead. In
addition, unlike the virtualization layer for enterprise
systems, embedded systems need to support a fixed
number of OSes. For these reasons we assigned the
fixed physical memory area for each OS.
Idle Instruction.
On a real processor, the idle instruction suspends a
processor until it receives an interrupt. On a
virtualized environment, this is used to yield the use
of real processor to another OS. We prevent the
execution of this instruction by replacing it with the
SPUMONE API. Typically this instruction is
embedded in a specific part of the kernel, which is
fairly easy to find.
Peripheral Devices.
Peripheral devices are assigned by SPUMONE to
each OS exclusively. This is done by modifying the
configuration of each OS not to share the same
peripherals. We assume that most of devices can be
assigned exclusively to each OS. This assumption is
reasonable because embedded system multi-OS
platforms have asymmetric OS combinations unlike
a symmetric multi-OS platform for enterprise
systems. It consists of different kinds of OSes,
usually RTOS and GPOS. For instance, RTOS is
used for controlling specific peripherals such as a
radio transmitter and some digital signal processors,
and GPOS for controlling a display and various
human interaction devices.
However some devices cannot be assigned
exclusively to each OS because both systems need to
use them. For instance, only one interrupt controller
is provided by the experimental processor we used.
Usually OS clears some of its registers during its
initialization. In the case of running on SPUMONE,
the OS booting after the first one should be careful
not to clear or overwrite the settings of the OS
executed first. We modified the Linux initialization
code to preserve the settings done by TOPPERS.
3 INTERRUPT LATENCY
REDUCTION
3.1 Interrupt Priority Level Separation
In order to minimize the interrupt latency of RTOS
in the reasonable bound although the activities of
GPOS run concurrently on a single device, we
propose two technique. The first technique is
replacing the interrupt enable and disable
instructions with the virtual instruction interface. A
typical OS disables all interrupt sources when
disabling interrupts for the atomic execution. On the
other hand, our approach leverages the interrupt
mechanism of the processor: we assign the higher
half of the interrupt priority levels (IPLs) to RTOS
and the lower half to GPOS (Fig. 3). When GPOS
tries to block the interrupts, it modifies its interrupt
mask to the middle priority. RTOS may therefore
preempt GPOS even if it is disabling the interrupts
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
372
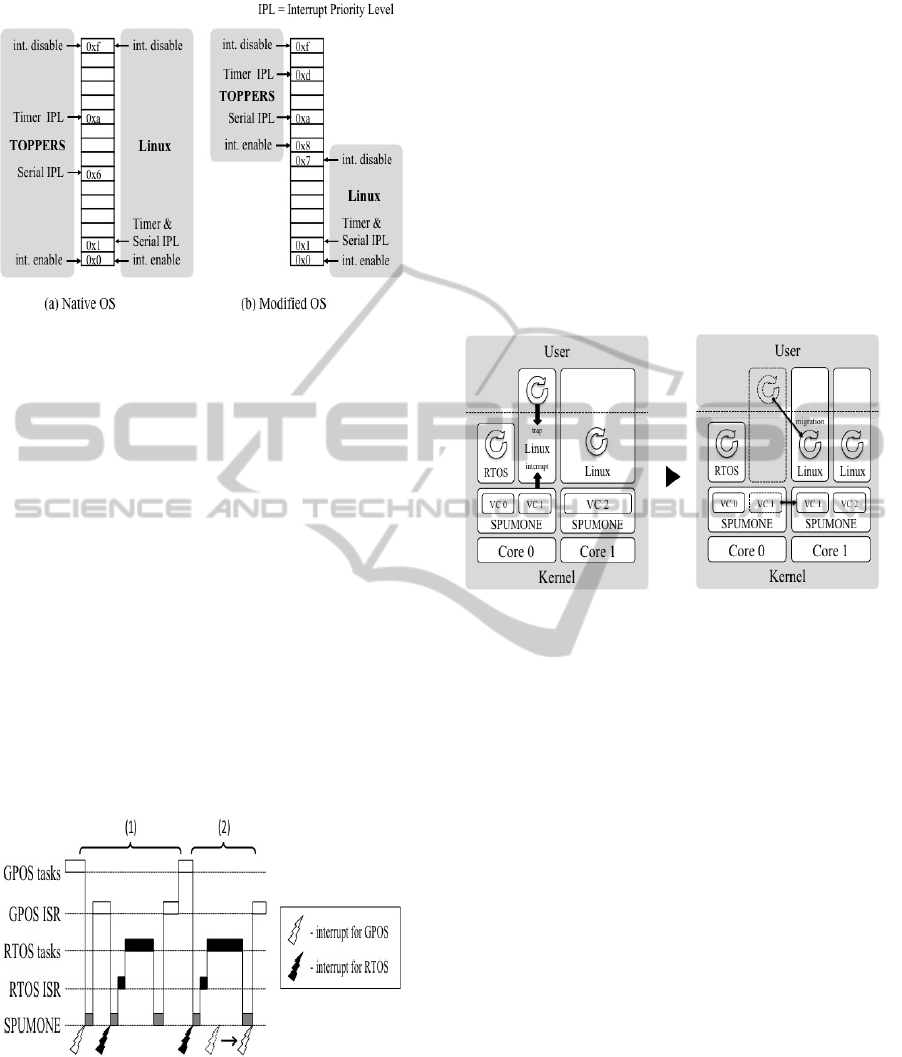
Figure 3: The interrupt priority levels separation.
(Fig. 4 (1)). On the other hand, when RTOS is
running, the interrupts are blocked by the processor
(Fig. 4 (2)). These blocked interrupts could be
delivered immediately when GPOS is dispatched.
The instructions enabling and disabling
interrupts are typically provided as the kernel
internal API. They are typically coded as inline
functions or macros in the kernel source code. For
GPOS, we replace those APIs with the instructions
enabling the entire level of interrupts and disabling
only low priorities interrupts. For RTOS, we replace
the API with the instructions enabling only high
priority interrupts and disabling the entire level of
interrupts. Therefore, interrupts assigned to RTOS
are immediately delivered to RTOS, and the
interrupts assigned to GPOS are blocked during the
RTOS’s execution. Fig. 3 shows the interrupt
priority levels assignment for each OS, which we
used in the evaluation environment.
Figure 4: Interrupt Delivery Mechanism.
3.2 Virtual Processor Core Migration
The second technique is based on the virtual core
migration. When we implemented the first
technique, we found that some paths of the GPOS
kernel gained a highest lock priority unexpectedly
(e.g. bootstrap, idle thread). This suggests us the
possibility that some device drivers or kernel
modules programmed in a bad manner gains a
higher IPL and interferes with the activity of RTOS.
We modified SPUMONE to proactively migrate a
virtual core, which is assigned to GPOS sharing a
physical core with RTOS, to another physical core
when it traps into the kernel or interrupts are
triggered as shown in Fig. 5. In this way, only the
user level code of GPOS is executed concurrently on
a shared physical core, which will never change the
priority levels. Therefore, RTOS may preempt
GPOS immediately without separating IPLs used in
the first technique.
Figure 5: Virtual core migration.
4 EVALUATION
We evaluated the basic overhead, the engineering
cost of modifying the OS kernels, and the real-time
responsiveness of RTOS running on SPUMONE.
The evaluation for a single-core system is done on
the SH-2007 reference board, with the SH-4A 400
MHz processor and 128MB memory. The evaluation
for a multi-core system is done on the
MSRP1BASE02, with a RP1 quad core 600 MHz
processor and 128MB memory. The core is also
based on the SH4A architecture. We use
TOPPERS/JSP 1.3 as RTOS and Linux 2.6.16 as
GPOS for the single-core, and Linux 2.6.24.3 as
GPOS for the multi-core processor. Linux mounts an
NFS share exported by the host machine as its root
file system. The basic overhead and engineering cost
are both evaluated on single-core environment.
4.1 Basic Overhead
For evaluating the basic overhead of SPUMONE,
we have measured the overhead of interrupt
handling latency and the time to build the Linux
kernel on the top of native (an unmodified OS
A STUDY ON REAL-TIME RESPONSIVENESS ON VIRTUALIZATION BASED MULTI-OS EMBEDDED
SYSTEMS
373
running on a bare-metal hardware) Linux and
modified Linux, respectively.
Table 1 shows the average and the worst case
CPU cycles required to handle the interrupts
delivered to native TOPPERS and modified
TOPPERS. In the average case, SPUMONE imposes
0.67μs overhead to the latency. The worst case
overhead shows the time required to save the states
of Linux and to restore the states of TOPPERS. The
increased latency is sufficiently small and
predictable for executing real-time applications.
Table 1: The latency of handling the timer interrupts in
TOPPERS.
Configuration CPU Clocks Time(μs)
TOPPERS
(native)
average 102 0.25
worst 102 0.26
TOPPERS on
SPUMONE
average 367 0.92
worst 1582 3.96
Table 2 shows the time required to build Linux
kernel on native Linux and modified Linux executed
on the top of SPUMONE together with TOPPERS.
TOPPERS only receives the timer interrupts each
1ms, and executes no other tasks. The result shows
that SPUMONE and TOPPERS impose the overhead
of 1.4% to the Linux performance. Note that the
overhead includes the cycles consumed by
TOPPERS. The result shows that the overhead of the
virtualization to the system throughput is sufficiently
small.
Table 2: Linux kernel build time.
Configuration Time Overhead
Linux Only 68m5.9s -
Linux and TOPPERS 69m3.1s 1.4%
4.2 Engineering Cost
We evaluated the engineering cost of reusing RTOS
and GPOS by comparing the number of modified
lines of code (LoC) in each OS kernel. Table 3
shows the LoC added and removed from the original
Linux kernels. We did not count the lines of device
drivers for inter-kernel communication because the
number of lines will differ depending on how many
protocols they support and how complex are them.
We did not include the LoC of utility device drivers
provided for communication between Linux and
RTOS or Linux and servers processes because it
depends on how many protocols and how complex
those are implemented.
Table 3: The total number of modified LoC in *.c, *.S,
*.h, Makefiles.
OS(Linux version)
Added
LoC
Removed Loc
Linux/SPUMONE(2.6.24.3)
161 8
RTLinux 3.2(2.6.9)
2798 1131
RTAI 3.6.2 (2.6.19)
5920 163
OK Linux (2.6.24)
28149 -
The table also shows the modified LoC for RTLinux
(Yodaiken 1999), RTAI (Mantegazza 2000) and OK
Linux (Heiser 2008) that are previous approaches to
support the multi OS environments. Since we could
not find RTLinux, RTAI, OK Linux for the SH-4A
processor architecture, we evaluated them developed
for the Intel architecture. OK Linux is a Linux
kernel virtualized to run on the L4 microkernel. For
OK Linux, we only counted the code added to the
architecture dependent directory arch/l4 and
include/asm-l4. The comparison would not be fair in
a precise sense, however as the table shows, it is
clear that our approach requires significantly small
modifications to the Linux kernel. This result is
achieved because we are executing OS in the kernel
mode.
4.3 The Effect of Linux Load
to TOPPERS Real-time
Responsiveness
We measured the effect of loads on Linux to the
dispatch latency of a periodic task in TOPPERS. We
compared two proposed techniques to reduce the
interrupt response time.
A periodic task runs every 1ms. It is sampled
100,000 times during the measurement. The dispatch
latency is the time spent from the interrupt triggered
until the periodic task starts its execution. Only the
periodic task is executed on TOPPERS which means
that no other task on TOPPERS will prevent the
execution of the periodic task.
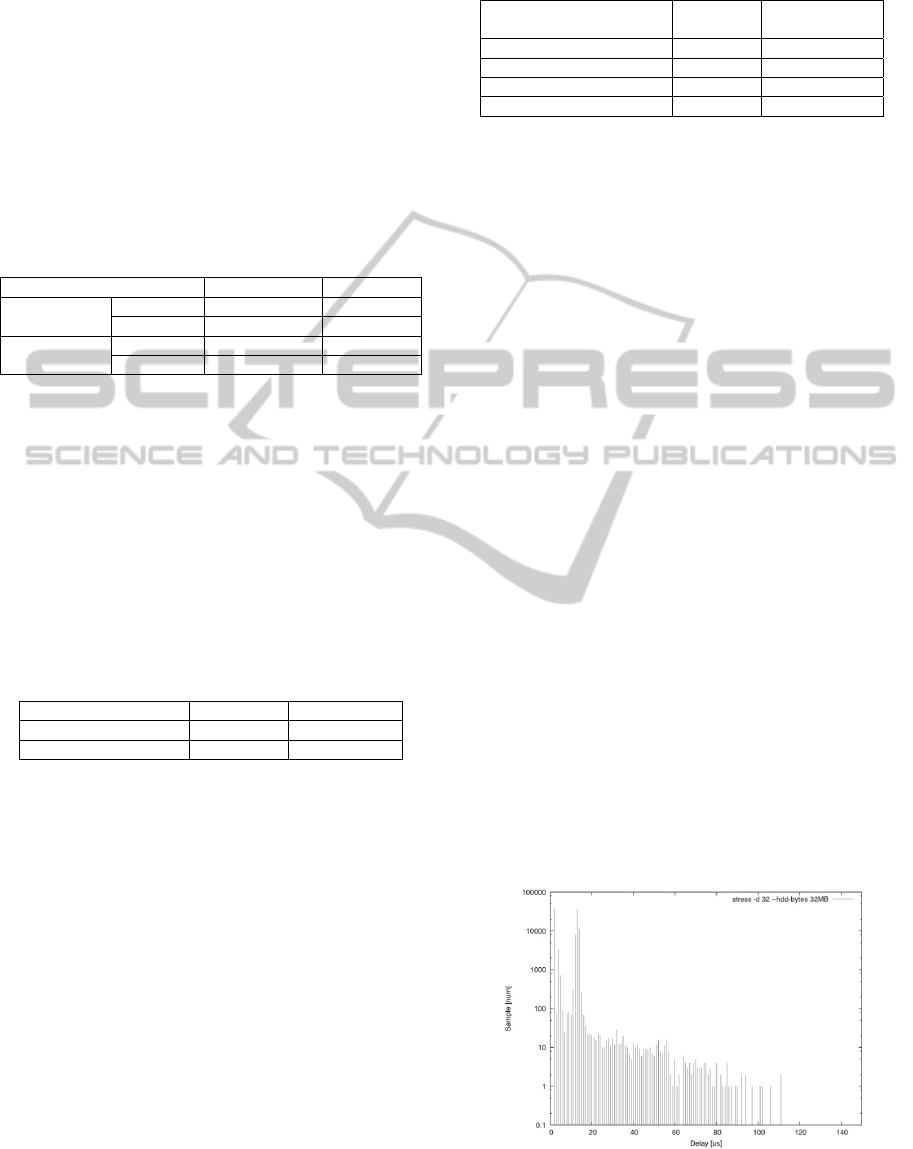
Figure 6: Dispatch latency on single core (CF write stress
on Linux without the IPL separation technique).
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
374

Fig. 6 and 7 compares the distribution of the
timer interrupt latency without and with the IPL
separation technique under invoking continuous
write () to a CF card file system. We executed a
stress program as the workload on the top of Linux.
The measurement with the file system load shows
the maximum latency of 111μs without the IPL
separation technique. With the IPL separation
technique, this latency is decreased to 34μs.
Comparing this result with the measurement done by
(Abeni, 2002), with the 1.8GHz Athlon processor
which shows the maximum latency of a few hundred
μs, we can see that our measurement with the
400MHz SH processor achieves fairly small
dispatch latency.
Figure 7: Dispatch latency on single core (CF write stress
on Linux with the IPL separation technique).
Fig. 8 and 9 compares the distribution of the
timer interrupt latency without and with the virtual
core migration technique under invoking continuous
write () to NFS share file system. The measurement
without the virtual core migration technique shows
the maximum latency of 96 μs. With the virtual core
migration technique is enabled, the maximum
latency is reduced to 39 μs.
Figure 8: Dispatch latency on multi-core (NFS stress on
Linux without the virtual core migration technique).
Figure 9: Dispatch latency on multi-core (NFS stress on
Linux with the virtual core migration technique).
Figure 10: Dispatch latency on multi-core (frequent IPC
on Linux without the virtual core migration technique).
Fig. 10 and 11 compares the distribution of the
dispatch latency without and with the virtual core
migration technique under the frequent IPC load on
the top of Linux. The IPC load is generated by
hackbench, which is modified to acquire clock
cycles from a device file which returns the correct
count independent of the processor utilization of
RTOS. The latency measured without the virtual
core migration technique numbered 3770 μs. This is
because the interrupt assigned to RTOS is blocked
by the spinlock mechanism of Linux. When the
virtual core migration technique is enabled, the
interrupt latency is reduced to 44 μs.
Figure 11: Dispatch latency on multicore (frequent IPC on
Linux with the virtual core migration technique).
A STUDY ON REAL-TIME RESPONSIVENESS ON VIRTUALIZATION BASED MULTI-OS EMBEDDED
SYSTEMS
375
The overall measurement shows the IPL
separation technique and the virtual core migration
technique mitigates the effect of interrupt disabling
performed inside the Linux kernel. Even though this
measurement only shows the statistical maximum
interrupt latency, it is clear that the proposed
techniques can reduce the average interrupt latency
significantly.
4.4 The Effect of TOPPERS Periodic
Task Load to Linux throughput
We have also measured the effect of the processor
utilization of TOPPERS to Linux. We compared the
score of the Dhrystone benchmark and the
hackbench benchmark with Linux running on the top
of 4 dedicated cores (indicated as 4 cores in the Fig
12 and 13), Linux running on the top of 3 dedicated
cores and one core shared with TOPPERS in various
workloads (xx% in the figures), and Linux running
on the top of 3 dedicated cores (indicated as 3 cores
in the figures). The task on TOPPERS is executed in
the cycle of 10 ms. The percentage shows the ratio
of the execution time of the periodic task against the
cycle (30% means that the task is executed for 3 ms
continuously).
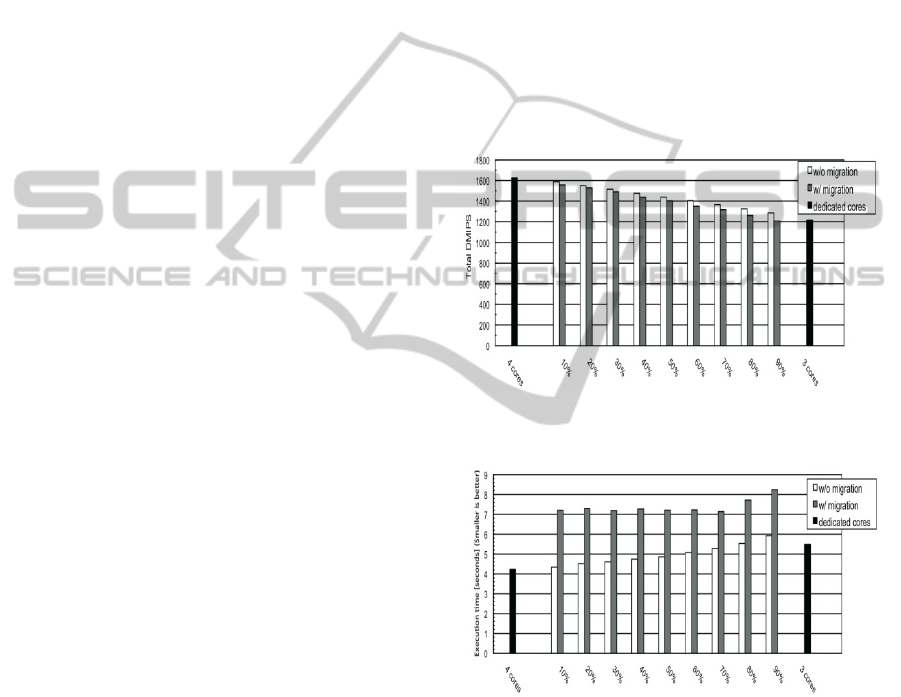
Fig. 12 shows the total score of the Dhrystone
benchmark. The bar at the left end shows the score
of the evaluation done with Linux executed on the
top of SPUMONE with three physical cores. As long
as the workload of the periodic task grows, the score
of Dhrystone degrades. At the load of 90%, the
result gets close or less than the score of the three
dedicated core configuration. The result shows the
overhead of the virtual core migration technique is
not significant in the benchmark.
In contrast, Fig. 13 shows the score of
hackbench, the benchmark which evaluates the
scalability of the number of cores. The execution
time of hackbench is increased when the virtual core
migration technique is enabled. This is caused by the
frequent system calls invoked during the benchmark,
which triggers a virtual core to migrate among
physical cores very frequently.
From the point of the processor utilization, it is
better to let Linux share a physical core with RTOS.
Since RTOS application processes are usually
designed not to consume the entire processor time,
in many cases, there is free processor time that can
be used by Linux effectively. However, the result of
hackbench shows that the performance improvement
depends on the characteristics of a workload running
on the top of Linux.
The results show that we need to assign Linux
processes carefully to virtual cores when some
Linux processes invoke system calls very frequently.
In this case, SPUMONE should not execute the
virtual core with RTOS. Because the manual
configuration between virtual cores and physical
cores by considering the number of system call
invocations, it is possible to enhance SPUMONE to
implement the above manual policy without any
programmers’ efforts. For example, when
SPUMONE finds the number of invoking Linux
system calls is increased, the virtual core to execute
the system calls is migrated to another physical core
that is not shared with RTOS, and the virtual core to
invoke less system calls is migrated to the physical
core that is shared with RTOS.
Figure 12: The effect of load on TOPPERS to Linux’s
DMIPS score (y-axis in DMIPS, larger is better).
Figure 13: The effect of load on TOPPERS to Linux’s
hackbench (y-axis in seconds, smaller is better).
5 RELATED WORK
Various approaches have been proposed to balance
real-time responsiveness and rich functionalities on
a single platform. One of the approaches is
modifying GPOS to support real-time
responsiveness. The real-time patch is a
modification to the plain Linux kernel to support the
kernel preemption (Molnar, 2010). It achieves a few
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
376

hundred μs latency (Abeni, 2002), but still the result
is not enough by a factor of ten comparing to typical
RTOSes. Even though the mechanism is potentially
capable of achieving real-time responsiveness, it
could be easily spoiled by bad-mannered device
drivers, which disable interrupts for a long period.
Porting existing programs from RTOS to Linux
would increase the risk of implementing such device
drivers, due to the differences between the
programming models of RTOS and Linux. Also, the
developers usually using RTOS are unfamiliar with
programming on Linux. Then, the possibility to
write bad mannered device drivers becomes high. In
addition, porting all the software from RTOS to
Linux would impose the substantial engineering
cost.
Another approach, known as the hybrid system,
is to execute RTOS in the GPOS kernel. RTLinux
and RTAI replace the Linux hardware abstraction
layer with their own version of RTOSes
(Mantegazza, 2000); (Yodaiken, 1999). Those
RTOSes would be executed in the kernel mode
together with the Linux kernel. The interrupt
response time would only be a few μs, which is
comparable to typical RTOSes. However those
RTOSes only support their original programming
interfaces, which prevents the straight-forward reuse
of some existing real-time software developed for
traditional RTOSes. Linux on ITRON is an
alternative system to RTLinux and RTAI, which
replaces the Linux hardware abstraction layer with
the existing RTOS, μITRON (Takada, 2002). This
architecture enables the system to reuse both the
software developed for Linux and μITRON. The
hybrid system provides the high real-time
responsiveness comparable with RTOS with the
reasonable engineering cost because a large amount
of existing software for embedded systems in Japan
has been developed on μITRON. However,
considering another combination of RTOS and
GPOS would impose redesigning the hybrid system
again from scratch. Because it is usual for
manufacturers to leverage diverse RTOSes, this
engineering cost would be problematic.
A virtual machine monitor (VMM) is another
technology focusing on accommodating RTOS and
GPOS into a single embedded device without the
modifications or with just the minimal modifications
to the OS kernels (Heiser, 2008). VMM provides a
virtual hardware interface which is identical (or
almost identical) to some real hardware and the
isolation mechanism between virtualized guest
OSes. VMM supporting the full-virtualization
technique exposes a virtual hardware interface
identical to a real hardware interface. OSes can be
executed without any modification on the full-
virtualization based VMM. However, implementing
the full-virtualization technique complicates the
design of VMM itself or requires special hardware
supports for the hardware virtualization.
Unfortunately, the hardware supports for the
hardware virtualization is still an unfamiliar feature
for embedded system processors. This motivates
VMM for embedded system to use the para-
virtualization technique. The L4 microkernel is a
typical system to offer the para-virtualization
interface for embedded system. However, the
engineering cost required for para-virtualizing a
guest OS kernel is also problematic as described in
Section 4.2. In addition, switching the privilege
levels between a guest OS and VMM will entail the
significant performance degradation.
In order to achieve the low engineering cost
while not penalizing performance, SPUMONE
executes OS kernels and itself in the privileged
mode. This also contributes to reduce the
engineering cost of modifying OS kernels, because
the majority of privileged instructions can be
executed by a processor directly and only a minimal
set of instructions needs to be emulated.
Furthermore, SPUMONE multiplexes only minimal
hardware resources, while other resources are
exclusively assigned to each OS by simply
modifying each OS kernel not to access the same
hardware resources.
There are some researches on how to design
scalable OSes on multi-core and many-core
processors. Corey is a many-core operating which
allows applications to explicitly specify the
assignment of critical OS kernel data structures
among cores (Wickizer, 2008). This hints the kernel
to schedule processes to improve the cache locality.
Multikernel is an experimental OS kernel which
exploits the multi-core and many-core processor
parallelism by constructing the system with the
distributed model (Baumann, 2009). SPUMONE’s
basic design is similar to Multikernel, but our
contribution is to reuse existing software programs
developed on the top of various existing OSes while
satisfying the real-time responsiveness.
6 CONCLUSIONS
In this paper we proposed a light-weight
virtualization layer which achieves the low overhead
and low engineering cost to construct multi-OS
embedded systems. In addition, we evaluated the
A STUDY ON REAL-TIME RESPONSIVENESS ON VIRTUALIZATION BASED MULTI-OS EMBEDDED
SYSTEMS
377

real-time responsiveness of RTOS running
concurrently with Linux under various workloads.
We proposed two techniques to mitigate the
performance interference from Linux to RTOS; the
IPL separation technique and the virtual core
migration technique. The evaluation shows that our
techniques reduced the interrupt latency
significantly. Especially on the multi-core system,
Linux sharing a physical core with RTOS increases
the processor utilization. However with an
application triggering frequent system calls may
loses its throughput due to the frequent virtual core
migration among physical cores.
In the future, we will implement several dynamic
policies to map virtual cores and physical cores
according to the system workloads. The policies
migrate virtual cores according to the number of
system call invocations of Linux as described in
Section 4.2. The dynamic mapping policy between
virtual and physical cores also offers the possibility
to reduce power consumption significantly by
migrating all virtual cores to a small number of
physical cores while the system workload is very
low, because it is possible to turn off the power of
most of physical cores.
REFERENCES
L. Abeni, A. Goel, C. Krasic, J. Snow, and J. Walpole. A
measurement-based analysis of the real-time
performance of linux. Real-Time and Embedded
Technology and Applications Symposium, 2002.
Proceedings. Eighth IEEE, pages 133–142, 2002.
F. Armand and M. Gien. A practical look at microkernels
and virtual machine monitors. In Proceedings of the
6th Consumer Communications and Networking
Conference(IEEE CCNC’09), Las Vegas, NV, USA,
2009.
P. Barham, B. Dragovic, K. Fraser, S. Hand, T. Harris, A.
Ho, R. Neugebauer, I. Pratt, and A.Warfield. Xen and
the art of virtualization. In SOSP ’03: Proceedings of
the nineteenth ACM symposium on Operating systems
principles, pages 164–177, New York, NY, USA,
2003. ACM Press.
A. Baumann, P. Barham, P. Dagand, T. Harris, R. Isaacs,
S. Peter, T. Roscoe, A. SchÅNupbach, and A.
Singhania. The Multikernel: A new OS architecture for
scalable multicore systems. In Proceedings of the
ACM SIGOPS 22nd symposium on Operating systems
principles, pages 29–44. ACM, 2009.
G. Heiser and A. Sydney. The role of virtualization in
embedded systems. 1st IIES, Glasgow, UK, Apr, 2008.
P. Mantegazza, E. Dozio, and S. Papacharalambous. RTAI:
Real Time Application Interface. In Linux Journal,
volume 2000. Specialized Systems Consultants, Inc.
Seattle, WA, USA, 2000.
I. Molnar. The realtime preemption patch.
http://people.redhat.com/mingo/realtime-preempt/.
H. Takada, T. Kindaichi, and S. Hachiya. Linux on
ITRON: A Hybrid Operating System Architecture for
Embedded Systems. In Proceedings of the 2002
Symposium on Applications and the Internet (SAINT)
Workshops. IEEE Computer Society Washington, DC,
USA, 2002.
Silas B. Wickizer, Haibo Chen, Rong Chen, Yandong Mao,
Frans Kaashoek, Robert Morris, Aleksey Pesterev, Lex
Stein, Ming Wu, Yuehua Dai, Yang Zhang and Zheng
Zhang, “Corey: An Operating System for Many
Cores”, USENIX OSDI 2008 (Operating Systems),
2008.
V. Yodaiken. The RTLinux Manifesto. In Proc. of The 5
tthh
Linux Expo, 1999.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
378
