
FAST REAL-TIME SEGMENTATION AND TRACKING OF
MULTIPLE SUBJECTS BY TIME-OF-FLIGHT CAMERA
A New Approach for Real-time Multimedia Applications with 3D Camera Sensor
Piercarlo Dondi and Luca Lombardi
Department of Computer Engineering and System Science, University of Pavia, Via Ferrata 1, Pavia, Italy
Keywords:
Time-of-Flight camera, Segmentation, Tracking, Mixed reality.
Abstract:
Time-of-Flight cameras are a new kind of sensors that use near-infrared light to provide distance measures
of an environment. In this paper we present a very fast method for real-time segmentation and tracking,
that exploits the peculiar characteristics of these devices. The foreground segmentation is achieved by a
dynamic thresholding and region growing: an appropriate correction based on flexible intensity thresholding
and mathematical morphology is used to partially compensate one of the most common problem of the TOF
cameras, the noise generated by sun light. By the use of a Kalman filter for tracking the retrieved objects the
system is able to correctly handle the occlusions and to follow multiple objects placed at different distances.
The proposed system is our basic step for complex multimedia applications, such as augmented reality. An
example of mixed reality that includes the integration of color information, supplied by a webcam is shown in
the experimental results.
1 INTRODUCTION
The introduction of Time-of-Flight (TOF) cameras
(Oggier et al., 2004) made possible real-time depth
measurement using a single compact sensor in spite
of previous multi-camera systems, like stereo cams.
The researches of the last few years showed a large
interest on this kind of devices in many fields related
to computer vision and computer graphics, like 3D
modeling, scene recostruction, user interaction or seg-
mentation and tracking of moving people (Kolb et al.,
2010). In our research we are focused primarily on
these last two topics. Our main purpose is the devel-
opment of a fast and accurate system for segmentation
and tracking of multiple subjects, than can be used as
basic step for multimedia applications, as augmented
reality or human-machine interaction.
For achieving this goal we have considered
strengths and weaknesses of these new kind of de-
vices. So we have designed a real-time foreground
segmentation algorithm that exploits the peculiar data
provided by TOF cameras and also compensates one
of this most recurrent problem, the noise introduced
by sun light.
Through the successive tracking phase based on
Kalman filter the system is able to follow multiple
subjects also in presence of occlusions and guarantees
the concurrent retrieval of subjects placed at different
distances.
The paper is organized as follow: section 2 pro-
vides an overview of TOF cameras; section 3 presents
the state of art of TOF based segmentation algorithms
and describes our solution with the proposed method
for compensate the sunlight interferences; section 4
analyzes our tracking method and its integration with
segmentation; in section 5 we show the experimental
results and in section 6 our conclusions.
2 TIME-OF-FLIGHT CAMERA
Time-of-Flight cameras are active imaging sensors
that use laser light in near infrared spectrum to pro-
vide distance measures of the scene. There are two
main solutions at the base of these devices: pulsed
light and modulated light. In the first case a coherent
wavefront hits the target and high frequency photon
gating measures the return time-of-flight; in the sec-
ond, the emitted light is modulated and time-of-flight
is measured by phase delay detection.
TOF cameras supply some advantages respect to
laser scanners or stereo cameras: they do not use any
moving mechanical component, can work at real-time
582
Dondi P. and Lombardi L..
FAST REAL-TIME SEGMENTATION AND TRACKING OF MULTIPLE SUBJECTS BY TIME-OF-FLIGHT CAMERA - A New Approach for Real-time
Multimedia Applications with 3D Camera Sensor.
DOI: 10.5220/0003322505820587
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 582-587
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

(18-20 fps), are insensible to shadows and can mea-
sure 3D distance in any kind of scenario. Artificial
illumination sources do not interact with the sensor,
but the presence of sun light introduces a significant
noise. A TOF camera has a nominal range of about
10 m: noise caused by scattering, multi-paths and en-
vironment light can reduce this value, so the useful
range is generally between 2 and 5 meters (Oprisescu
et al., 2007).
In our project we utilize the SR3000 realized by
MESA Imaging (Oggier et al., 2004), a modulated-
light camera that we use at 20MHz. Its active sources
emit in the near infrared around 850nm. The SR3000
supplies two maps per frame with a resolution of
176x144 pixels: the former contains distance infor-
mation and the other one measures the intensity of
light reflected by objects. The sensor is completely
indifferent to visible light, so values of intensity de-
pend only by light in near infrared. As a consequence
closed objects appear more clear because reflect more
light, instead faraway objects result to be darker.
3 SEGMENTATION
There are some different approachs for TOF-based
segmentation. An interesting solution, based only on
the depth data, is proposed in (Parvizi and Wu, 2008).
The extraction and the association of the objects are
made analyzing the probability density function of the
depth and the distribution of its histogram.
Moreover the most common method is certainly
the background subtraction, a classical computer vi-
sion tecnique, widely used for video surveillance and
for tracking applications. This method is most often
pixel-based and only rarely region-based; newly ac-
quired frames are compared to the model and pixels
which differ significantly are selected as foreground.
In some works the background model is estimated us-
ing only the data providing by TOF-camera (Hansen
et al., 2008) or (Bevilacqua et al., 2006), while in
other cases is made using a combination of multiple
cameras (Guomundsson et al., 2008). In particular
the integration of color and depth data for background
modeling is largely used for multimedia applications,
like in (Crabb et al., 2008) for background substitu-
tion, or in (Bartczak et al., 2008) for create a 3D am-
bient for mixed reality.
However, background subtraction suffers from
known problems like ghosts appearing when back-
ground objects changes or absorption of immobile
persons. Background model generation can also be
computationally expensive, expecially if it needs a
high resolution 3D model.
Also other alternative approaches take advantage
of the combination of traditional and TOF cameras. In
(Santrac et al., 2006) the depth information are used
for select the best input area for a color based seg-
mentation algorithm (SIOX). While in (Bleiweiss and
Werman, 2009) a fusion of colors and depth data is
employed for creating a new segmentation and track-
ing method. This solution, based on mean shift algo-
rithm, is intended to compensate the respective weak-
nesses of the two different kind of sensors.
The presented segmentation method is designed
so as not to need any preprocessing operations or a
priori knowledge of the environment or of the objects.
It can be subdividedin two main phases: a first thresh-
olding of the distance map based on the correspon-
dent values of intensity image, followed by a region
growing that starts from seeds planted on peaks of the
intensity map.
3.1 Thresholding and Region Growing
Considering the characteristic of the TOF camera
summarized in section 2, we decided to use the data
of intensity map as a guide to restrict the area of inves-
tigation in the range map and to find good candidates
for becoming seeds.
We estimate an opportune intensity threshold
(λ
seed
) applying the Otsu’s method. This parameter
is used to define the set of seeds S (see formula 1).
{I
x
> λ
seed
, kP
x
− P
s
k > γ, γ > 1} → {P
x
∈ S} (1)
P
x
is a point of the distance map, I
x
is its corresponded
intensity value and P
s
is the last seed found. The pres-
ence of a control about the distance between seeds
guarantees a better distribution of them and reduces
significantly their number in order to decrease the
time needed for the following growing step.
The similarity measure S between a cluster pixel x
and a neighboring pixel y is defined in 2:
S(x, y) = |µ
x
− D
y
| (2)
D
y
is the distance value of pixel y and µ
x
is a local
parameter related to the mean distance value around x
(see equation 5). The lower is S, the more similar are
the pixels. When a seed is planted, µ
x
is initialized
to D
x
. Considering a 4-connected neighborhood, a
pixel x belonging to a cluster C absorbs a neighbor y
according to the following conditions:
{x ∈ C, S(x, y) < θ, I
y
> λ} → {y ∈ C} (3)
λ is an intensity threshold proportional to λ
seed
dy-
namically calculate for every frame using equation 4.
λ = k ∗ λ
seed
, k ∈ [0.25;0.33] (4)
FAST REAL-TIME SEGMENTATION AND TRACKING OF MULTIPLE SUBJECTS BY TIME-OF-FLIGHT
CAMERA - A New Approach for Real-time Multimedia Applications with 3D Camera Sensor
583
θ is a constant parameter experimentally estimated.
Our tests with multiple sequences of data estabilsh
that θ must assume a value power of 2 major of 512
for maintain a good clusters separation. An optimal
default choice is 1024.
When a neighbor y of seed x is absorbed, we com-
pute the average distance value µ
y
in an incremental
manner as follows:
µ
y
=
µ
x
∗ α+ D
y
α+ 1
(5)
Parameter α is a learning factor of the local mean of
D. If pixel y has exactly α neighbors in the cluster,
and if the mean of D in this neighbor is exactly µ
x
,
then µ
y
becomes the mean of D when y is added to
the cluster.
Every region grows excluding the just analyzed
pixels from successive steps. The process is iterated
for all seeds in order of descending intensity. Regions
too small, with dimension inferior to a fixed value, are
discarded.
Our approach is faster than methods that use
global region statistics, like e.g. centroid region grow-
ing, where the order in which boundary pixels are
tested is significant. µ
y
depends only on the history
of pixel absorptions until y is first reached by a grow-
ing front, and not from later steps. Thus, as soon as
a pixel y is reached by the cluster boundary, it can be
tested for absorption.
The locality of our approach tolerates greater vari-
ations of map values inside a cluster because it pro-
duces transitive closures of the similarity S. Both head
and shoulders of the same person, lying at slightly dif-
ferent distance from the camera, are more likely to be
segmented as the same cluster, rather than two differ-
ent clusters (Bianchi et al., 2009).
The advantages of the proposed region growing
can be summarized in good quality of boundaries (in-
trinsic noise rejection), independence of background
models, and independence of shape models.
3.2 Improvements for noised Conditions
The proposed approach is very fast and ensures a
good compromise between the computational time
and the precision of the results. A previous analy-
sis (Bianchi et al., 2009) has described its behavior
in term of correctness (the percentage of correctly ex-
tracted foreground data) and completeness (the per-
centage of the reference data that is explained by the
extracted data) in funciton of the parameter λ.
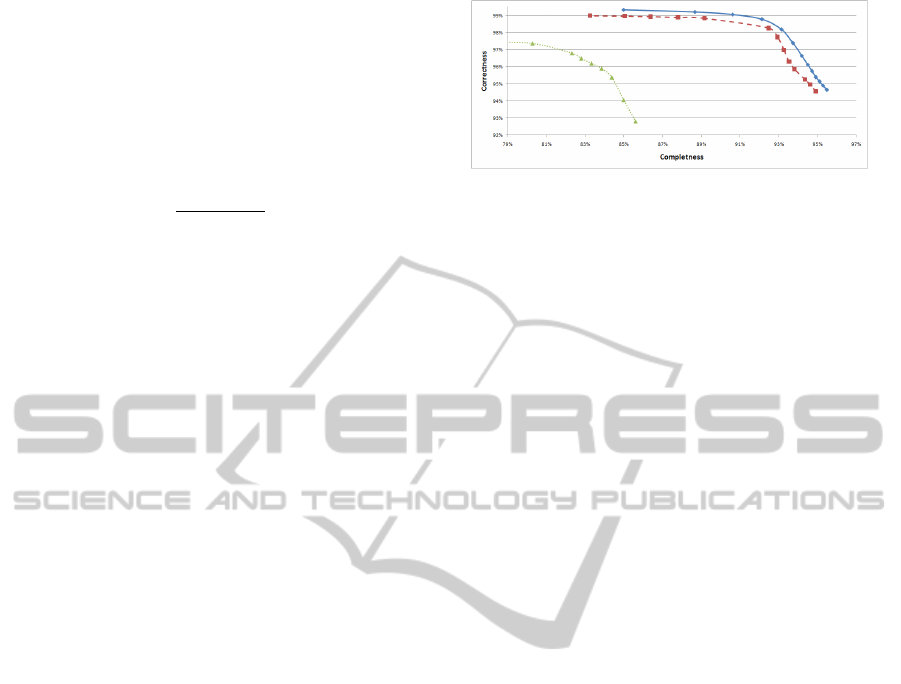
In optimal conditions, with no noise generated by
sun light, the tests have scored between 94% and 97%
in correctness and between 92% and 96% in com-
pleteness (see red dashed line and blue continuous
Figure 1: Correctness vs. completness for different se-
quences.
line in figure 1). Otherwise in a more general situ-
ation, like a room with a window, the system presents
a predictable reduction of completeness (82%-85%),
also maintaining a very good values of correctness
(93% - 97%) (see green dotted line in figure 1). This
means that in noised condition the algorithm retrieves
correctly the main part of the shape of the object but
excludes some details, for example the hair (see top
line of figure 4). The impact of this issue can be re-
duced making less resctrictive the threshold λ.
Firstly we introduce a new set of point A, defined
by the following equation 6:
{(I
y
> λ) ∨ [(I
y
< λ) ∧ (I
8n
> δ ∗ λ)], δ ∈ [0, 1]}
→ {I
y
∈ A} (6)
where I
8n
is the intensity of all the neighbours of the
pixel y considering the 8-connection.
This set is obviously greater than the precedent,
but has still some imprecision (see figure 2(b)). So
we have designed another set of points, called M, ap-
plying to A a series of morphological operations (see
figure 2(c)). The union of A e M produces a more
precise set, L, that can fix the inaccuracies of A.
Figure 2(d) shows all the points of the distance
map that have a correspondent intensity belonging to
L. The comparison with figure 2(a), that presents
the standard thresholding method, shows a notable in-
crease of details with the new solution.
The appropriate sequence of morphological op-
erations was established experimentally making tests
with different light conditions and subjects. Gener-
ally the best results were obtained applying in order
two dilation, five erosion and a final dilation.
L = A∪ M (7)
We can now redefine as follow the equation 3, ac-
cordingly with the proposed corrections.
{x ∈ C, S(x, y) < θ, I
y
∈ L} → {y ∈ C} (8)
The other parts of region growing do not need another
modification and can be implemented like described
previously.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
584
(a) (b) (c) (d)
Figure 2: A distance map filtered with different type of
thresholding: (a) point with I
y
> λ; (b) only set A with
δ = 0.5 ; (c) only set M; (d) set L.
4 TRACKING
Many related works have examined the potential of
Time-of-Flight cameras for tracking. The proposed
approachs are very different: they range from an
Expectation Maximization algorithm (Hansen et al.,
2008) to a method based on depth distribution(Parvizi
and Wu, 2008). The use of multiple cameras was in-
vestigated in (Guomundsson et al., 2008), but its ap-
plicability appears limited to a little ambient. Another
interesting solution involves the integration of color
and depth data for obtaining a more precise outcome
(Bleiweiss and Werman, 2009).
We have experimented with a traditional Kalman
filter to track the clusters. This kind of solution is al-
ready been analyzed in (Bevilacqua et al., 2006) with
good results, but in that case the camera was placed as
to provide a top-down view of the scene. This simpli-
fies the elaboration but reduces significantly the visi-
ble area. Moreover all the detailes of the people are
lost. So we always use a frontal view of the scene to
made a more versatile implementation.
The Kalman state has six dimensions referring
to centroid coordinates, i.e. (x, y, z, v
x
, v
y
, v
z
), all ex-
pressed in image coordinates, as the SR3000 provides
output data already organized in 3D Cartesian coor-
dinates. After segmenting an image by region grow-
ing, we compare the detected clusters and those being
tracked. The association between measured clusters
and Kalman clusters is evaluated by minimum square
euclidean distance between their centroids.
We compute a Gaussian representation of Kalman
cluster at time t − 1 and use its updated centroid posi-
tion at time t to delineate the image region where the
cluster should appear in frame t.
In case of cluster occlusion the kalman tries to es-
timate the more probablepath of the disappeared clus-
ter using its last detected movements and increasing
the research area in order to compensate estimation
error. If the cluster reappears shortly (at most within
30-40 frames) in a position closed to the predicted one
it can be reassigned to its precedent kalman. On the
contrary its kalman can be reinitialized and reassigned
to a new cluster.
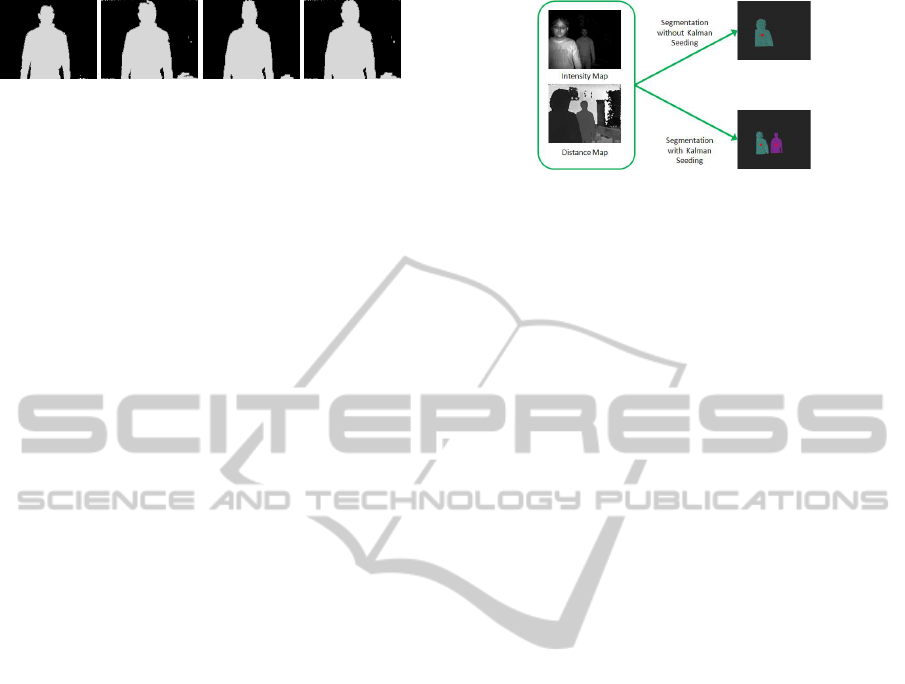
Figure 3: Segmentation without and with kalman seeding.
The data provided by our method can be used not
only for tracking but also for increasing the accuracy
of the segmentation, like presented in figure 3. In this
situation we have two foreground objects to follow: if
one of them gets too close to the sensor its intensity
values grow too much and accordingly all the seeds
will be concentrated on it, excludingthe second object
from region growing. This issue can be fixed using
the informations generated by the prediction step of
Kalman filter as new input for seeding phase. We seed
at time t in all pixels around the predicted centroid at
time t + 1.
Adopting this procedure it is possible to extract
and to track at the same time middleground and fore-
ground objects.
5 EXPERIMENTAL RESULTS
5.1 Foreground Segmentation
In order to evaluate the robustness against noise of our
segmentation algorithm we consider some video se-
quences acquired in our lab with artificial and natural
illumination. The foreground objects extracted are vi-
sualized like 3D models where the vertexes positions
are supplied by distance map and the color is obtained
normalizing the intensity map. Figure 4 shows the
results obtained with different subjects using the old
(section 3.1) and the new method (section 3.2). Af-
ter the improvements the extracted data contain a lot
of more significant details, like hair or part of arms
and legs (see bottom line of figure 4). This significant
increase of completeness involves a small reduction
of correctness, generates by new false positive at the
border of the extracted objects. However these inac-
curacies can be accepted considering the advantages
supplied by a more complete model.
5.2 Performance Evalutation
We run our segmentation and tracking method on dif-
ferent models of computers in order to determine its
FAST REAL-TIME SEGMENTATION AND TRACKING OF MULTIPLE SUBJECTS BY TIME-OF-FLIGHT
CAMERA - A New Approach for Real-time Multimedia Applications with 3D Camera Sensor
585
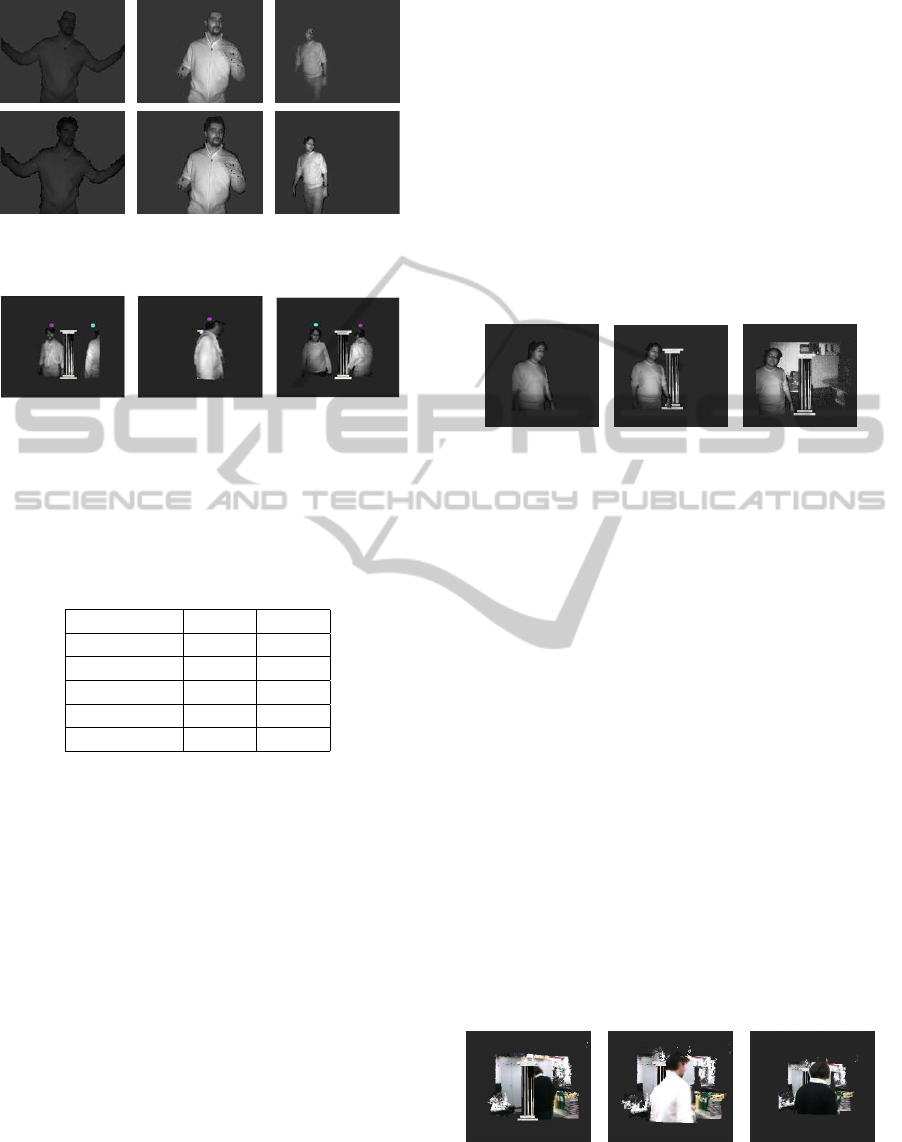
Figure 4: Segmentation results without (top) and with (bot-
tom) the proposed noise correction.
Figure 5: Tracking sequence.
Table 1: Speed on different computers: PC1: Intel Core
2 Quad Q9300 2.60 GHZ with Nvidia GeForce GTX 260;
PC2: Intel Core 2 Duo T6600 2.40 GHz with Nvidia
GeForce 9800 GTX; PC3: Intel Pentium IV 3.00 GHZ with
Nvidia GeForce FX 5600; NB1: Intel Core 2 Duo L9400
1.86 GHZ with Integrated Graphic; NB2: Intel Pentium M
750 1.86 GHz with ATI Radeon X700.
Computers Test 1 Test 2
Computer 1 18 fps 44 fps
Computer 2 18 fps 42 fps
Computer 3 18 fps 18 fps
Notebook 1 18 fps 28 fps
Notebook 2 18 fps 24 fps
performances on low, middle and high level CPUs.
We considered two types of situations: online ex-
ecution, with input directly provided by the camera,
and offline execution, where the program analyzes
precedent recorded video sequences. The first experi-
ment is useful to test if it is possible using the SR3000
at its standard frame rate (18-20 fps as mentioned in
section 2); while the second one gives us the maxi-
mum obtainable speed. This last data is particulary
relevant considering the capabilities of the more re-
cent versions of TOF cameras, like SR4000, that can
reach 54 fps.
Table 1 summarizes the obtained results. The
method turns out to be not computationally expen-
sive, the first test is passed in all the cases and also
the second shows very good performances. Also with
a 10 years old processor (see computer 3 in table 1)
we can reach the real-time execution. It is interest-
ing to notice than the load for the GPU is very small
for these operations, involves only the final visualiza-
tion. So it possible to transfer the heaviest phases of
the segmentation algorithm on graphic hardware for
taking advantages of its parallel computational capa-
bilities. This is a promising solution for increasing the
performances, especially if we use a low level CPU.
5.3 Mixed Reality
The mixed reality is the merge of real and virtual
worlds to produce a new environment where phys-
ical and digital objects coexist and interact in real-
time. The Time-of-Flight camera are very useful in
this kind of scenario (Bartczak et al., 2008), so it is a
good choice for testing all the features of our system.
(a) (b) (c)
Figure 6: Mixed reality steps: (a) foreground segmentation;
(b) adding of virtual object; (c) adding of 3D backgroud
provided by TOF.
In an initial phase we considered only the data
provided by SR3000, then we integrated the distance
data with the color information supplied by a tra-
ditional webcam. This last test was made only for
checking the feasibility of the color integration in our
method, so we used a very low resolution webcam. In
future improvements we will consider a high resolu-
tion camera for provide a more likeable outcome.
For solve the cameras calibration issue we stud-
ied the more recent approaches, as the ortophoto gen-
eration described in (Reulke, 2006) or the projective
texture maps analyzed in (Lindner and Kolb, 2007).
After some tests with both of them we chose a solu-
tion quite similar to the first one.
For both the cases (black and white and color) we
follow the same procedure summarized in figure 6:
firstly we extract the foreground subject, then add the
column and finally insert the backround, that is sim-
ply the 3D distance map generated by the TOF. Some
examples results with color are shown in figure 7.
Figure 7: Mixed Reality with color.
The system is able to manage the interaction of
multiple clusters and also the tracking appears to be
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
586

robust to the occlusions. This feature is better ex-
plained by figure 5 where there are displayed different
frames of the same sequence. The colored spheres on
the top of the two subjects are the marks of kalman
trackers, note how the correspondence between clus-
ter and its kalmans is always mantained. The tracking
data can be useful also for increasing the realism of
the simulation, for example with a real time adjust-
ment of the position of the virtual objects. A simi-
lar solution was firstly described in (Bartczak et al.,
2008) but suffers of some limitations: it need an of-
fline computation of the background model and it can
discriminate only one subject at time.
In accordance with the description of section 3 our
approach appears to be more general. We do not need
any preprocessing operation except for the calibration
and all the steps of segmentation are executed in real-
time without any information on the background and
with heterogeneus types of illumination.
6 CONCLUSIONS
We have presented a new approach to multiple sub-
jects segmentation and tracking, that exploits the in-
trinsic characteristics of the intensity and distance sig-
nals generated by modulated-light TOF. Our method
is able to reduce the effect of noise introduced by sun
light interferences, through a flexible intensity thresh-
olding and the mathematical morphology.
The experimental results show that the proposed
approach can be used in multimedia applications, like
mixed reality.
The performance tests prove that the system is
computationally efficient and can reach real-time exe-
cution also with low level computers. A future paral-
lel implementation of the most power intensity parts
of the system, like mathematical morphology, can fur-
ther increase the performances.
Other improvements include data fusion of color
and TOF cameras for a more robust segmentation.
REFERENCES
Bartczak, B., Schiller, I., Beder, C., and Koch, R. (2008).
Integration of a time-of-flight camera into a mixed
reality system for handling dynamic scenes, moving
viewpoints and occlusions in real-time. In 3DPVT08,
Fourth International Symposium on 3D Data Process-
ing, Visualization and Transmission.
Bevilacqua, A., Stefano, L. D., and Azzari, P. (2006). Peo-
ple tracking using a time-of-flight depth sensor. In
AVSS 06, Video and Signal Based Surveillance. IEEE
Computer Society.
Bianchi, L., Dondi, P., Gatti, R., L.Lombardi, and Lom-
bardi, P. (2009). Evaluation of a foreground segmen-
tation algorithm for 3d camera sensor. In ICIAP 2009,
15th International Conference of Image Analysis and
Processing. Springer.
Bleiweiss, A. and Werman, M. (2009). Real-time fore-
ground segmentation via range and color imaging. In
Dyn3D09, Proceedings of DAGM2009 Workshop on
Dynamic 3D Imaging. Springer.
Crabb, R., Tracey, C., Puranik, A., and Davis, J. (2008).
Real-time foreground segmentation via range and
color imaging. In CVPRW2008, Computer Vision and
Pattern Recognition Workshops. IEEE Computer So-
ciety.
Guomundsson, S., Larsen, R., Aanaes, H., Pardas, M., and
Casas, J. R. (2008). Tof imaging in smart room en-
vironments towards improved people tracking. In
CVPRW 2008, Computer Vision and Pattern Recog-
nition Workshops. IEEE Computer Society.
Hansen, D. W., Hansen, M. S., Kirschmeyer, M., Larsen, R.,
Silvestre, D., and Silvestre, D. (2008). Cluster track-
ing with time-of-flight cameras. In CVPRW 2008,
Computer Vision and Pattern Recognition Workshops.
IEEE Computer Society.
Kolb, A., Barth, E., Koch, R., and Larsen, R. (2010). Time-
of-flight cameras in computer graphics. In Computer
Graphics Forum volume 29, issue 1. Wiley.
Lindner, M. and Kolb, A. (2007). Data-fusion of pmd-based
distance-information and high-resolution rgb-images.
In ISSCS 2007, International Symposium on Signals,
Circuits and Systems.
Oggier, T., Lehmann, M., Kaufmann, R., Schweizer, M.,
Richter, M., Metzler, P., Lang, G., Lustenberger, F.,
and Blanc, N. (2004). An all-solid-state optical range
camera for 3d real-time imaging with sub-centimeter
depth resolution (swissranger). In SPIE 2004, Society
of Photo-Optical Instrumentation Engineers Confer-
ence Series.
Oprisescu, S., Falie, D., Ciuc, M., and Buzuloiu, V. (2007).
Measurements with tof cameras and their necessary
corrections. In ISSCS 2007, International Symposium
on Signals, Circuits and Systems.
Parvizi, E. and Wu, Q. J. (2008). Multiple object track-
ing based on adaptive depth segmentation. In Cana-
dian Conference of Computer and Robot Vision, pages
273–277. IEEE Computer Society.
Reulke, R. (2006). Combination of distance data with high
resolution images. In IEVM06, Image Engeeniring
and Vision Metrology.
Santrac, N., Friedland, G., and Rojas, R. (2006). High
resolution segmentation with a time-of-flight 3d-
camera using the example of a lecture scene.
Technical report, http://www.inf.fu-berlin.de/inst/ag-
ki/eng/index.html.
FAST REAL-TIME SEGMENTATION AND TRACKING OF MULTIPLE SUBJECTS BY TIME-OF-FLIGHT
CAMERA - A New Approach for Real-time Multimedia Applications with 3D Camera Sensor
587
