
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM
SEAS BASED ON REAL WAVE SPECTRA
José Miguel Varela and Carlos Guedes Soares
Centre for Marine Technology and Engineering, Technical University of Lisbon
Instituto Superior Técnico, Av. Rovisco Pais, 1049-001 Lisboa, Portugal
Keywords: Ship Motions, Interactive Simulation, Random Seas, Wave Spectra.
Abstract: The current paper presents a methodology to compute and represent the ship motions at interactive frame
rates, when navigating on a virtual sea defined by a real wave spectrum. The Inverse Discrete Fast Fourier
Transform algorithm is used to compute the sum of all ship motions components induced by the waves and
get the final irregular ship motion. Currently, this is the most efficient method to simulate the ship motions
in interactive ocean simulations using wave spectra to describe the sea states. The visual realism and
physical accuracy of the simulations turns this method into a powerful tool for developing interactive ship
simulators.
1 INTRODUCTION
Physically based ship motions simulation is a
fundamental task for ship simulators used as training
or as studying tools. In order to immerse the user in
the Virtual Environment as much as possible, these
tools require high levels of visual realism and
physical accuracy at interactive frame rates. In fact,
discrepancies between the sea state and the induced
ship motions, even if small, are immediately
detected by the user and the sense of immersion
decreases substantially. Moreover, if
manoeuvrability operations are to be studied with
the simulator, it is fundamental to preserve the
physical accuracy to obtain valid conclusions.
The method presented computes and simulates
interactively the ship motions induced by a random
sea surface based on a real wave spectrum. As the
surface may be deformed by thousands of wave
trains with different (small) amplitudes, frequencies
and directions of propagation, the method uses the
Inverse Discrete Fast Fourier Transform (IDFFT)
algorithm to compute the final ship motion, which is
given by the sum of all the singular motions induced
by each wave component. As a result, the method
allows simulating the ship motions in a virtual sea
surface that can be deformed by a large number of
waves increasing not only the visual realism but also
the physical accuracy of the simulation. By
establishing and maintaining the synchronism
between the phases of wave trains and ship motions,
the method allows simulating the motions for any
ship position, speed and heading. In order to test the
method, an ocean generator software system was
developed, which creates virtual sea surfaces based
on the random sea concept. Then, transfer functions
of a LNG ship, which describe how the ship reacts to
forces generated by wave trains with different
properties, were used to apply the method for
different sea states and manoeuvrability conditions.
Good results were obtained from the performance
and realism points of view in which the ship motions
are coherent and realistic even for stormy seas
composed by thousands of wave trains.
The remaining of the paper develops as follows:
section 2 provides some background on the sea
surface generation and on the consequently induced
ship motions computation; section 3 describes the
method used to compute and simulate the ship
motions; section 4 presents implementation details
of the method in a prototype software system;
section 5 discusses the results; section 6 presents the
methodology used to validate the results and finally
the main conclusions are presented in section 7.
2 BACKGROUND
Ship motions are represented by six main
components corresponding to the six degrees of
235
Miguel Varela J. and Guedes Soares C..
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM SEAS BASED ON REAL WAVE SPECTRA.
DOI: 10.5220/0003324502350244
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 235-244
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
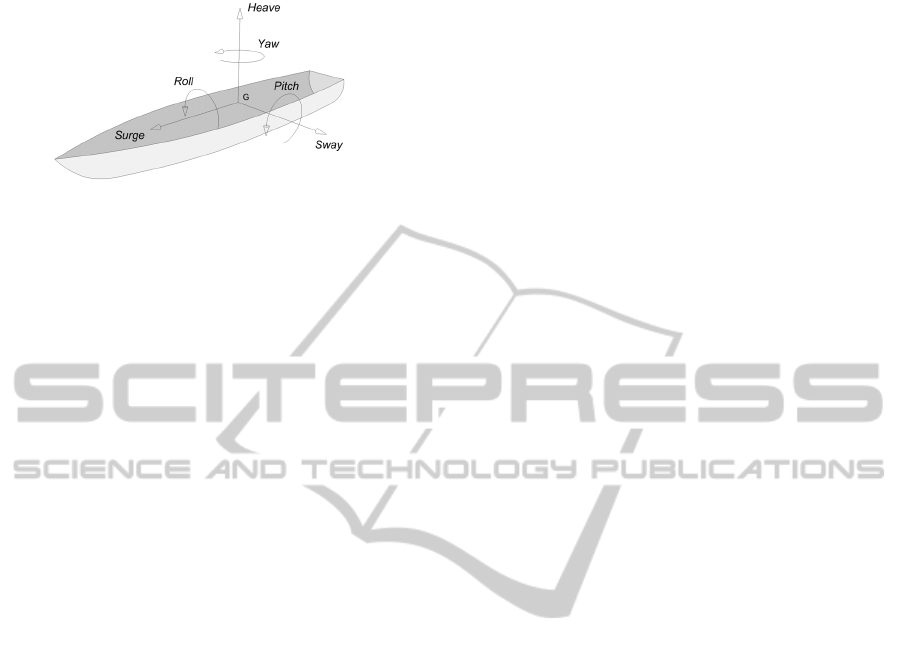
freedom in the 3D space, as presented in figure 1.
Figure 1: Ship motion is divided into six components in
the six degrees of freedom.
Surge, sway and heave correspond to the
translation motions along the x, y and z axis
respectively, while roll, pitch and yaw are the
rotation motions also in the x, y and z respectively.
Most of the ship motion simulators running on
desktop computers do not actually compute the
motions in real-time. Depending of the purpose of
the simulator, ship motions may be computed
previously, and the Virtual Environment (VE) works
as a post-processing visualization and interaction
tool for the simulation. Databases store the ship
motions’ parameters for different wave patterns, and
the data is then queried (in database) and applied in
real-time. It is the case of Daqaq (2003), in which
the ship motion must be realistic in order to test
loading and unloading operations.
Simulation models that compute ship motions in
real time such as Xiufeng et al. (2004) or Sutulo et
al. (2002), normally do not compute wave induced
motions and only the three degrees of freedom
corresponding to the surge, sway and yaw in the
manoeuvrability equations are considered. Such
tools are used to simulate port operations where the
motions induced by the sea waves (heave, roll and
pitch) are negligible. Although three of the ship
motions are not computed, these simulators include
manoeuvrability models to calculate ship trajectories
that consider the interaction between the water, the
sea bottom (shallow waters) and coastal structures
(walls, berths, etc.), which increases the
computational work required, Sutulo et al. (2010).
In an attempt to compute the six motion
components in real time, simplified models such as
Ueng et al. (2008) have been developed. They use a
moving grid attached to the ship generated by the
vertical projection of the ship’s body into the
horizontal plane. The bounding box of the projection
is used and a uniform grid of cells is superposed on
the bounding box. Then the height field of the sea
surface is evaluated at each grid point and the
average height field is multiplied by the area of the
grid to compute the excitation force of water. For
each ship motion component, resistance forces are
estimated and the net force is obtained by
subtraction. Accelerations are then calculated by
applying the Newton’s second law.
Another approach to estimate the ship motions
induced be sea waves is by computing commonly
called Response Amplitude Operators (RAOs). In
linear theory, ship motions are calculated as the
finite sum of sinusoidal components with a random
initial phase, Bhattacharyya (1978). The amplitude
of each of the components is given by RAOs that
define the relationship between ship motion and
wave height versus regular wave frequency, Lewis
(1988). RAOs may be obtained by wave tank
experiments with scale models of the ships or may
be computed by specialized software. The strip
theory is the common approach to compute the
RAOs of the ships for the six degrees of freedom,
Salvesen et al. (1970). This theory assumes the ship
as a slender body and includes ship motion
coefficients such as added mass and damping in
heave and pitch motions. Numerous comparison
studies showed that strip theory generally gives good
results for ship motions in low to moderate regular
waves in which the influence of nonlinearities is still
low. However, Fonseca and Guedes Soares (1998)
presented a generalization of the theory to deal with
large amplitude motions.
Pre-calculated RAOs, which are defined for each
particular ship hull with specific cargo conditions,
allows to compute the amplitudes of each ship
motion component in frequency domain for
predefined manoeuvrability conditions (ship speed
and heading) and sea states (frequency and direction
of propagation of the wave trains). The conversion
of the ship motion component from frequency to
time domain, which is the one of interest for the
interactive simulation, takes into consideration the
phase of each wave when it reaches the ship. In
order to achieve a consistent and physically correct
motion in time domain, the phase of each ship
motion component and the phase of the
corresponding wave train must maintain the
relationship given by the RAO. The final motion is
given by the sum of all the ship motions generated
by all the wave trains.
Each ship motion component is given as a
periodic function in time of the following type:
(
)
iiii
tax
ϕ
ω
+
=
sin
(1)
where i corresponds to one of the motion types, x
i
is
the ship motion of type i, a
i
is the amplitude of the
motion derived by the RAO, ω
i
is the frequency of
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
236

the motion, t is the time and φ
i
is the phase
difference between the ship motion and the wave
train motion. This last value is also pre-computed by
transfer functions that depend of the ship
hydrodynamic properties. Naturally, these RAOs are
only computed for a certain number of ship speeds
and headings, and for a limited range of wave trains’
frequencies and directions of propagation. Hence,
for intermediate values interpolations are normally
applied. Examples of comparison of numerically
simulated motions with measurements can be found
in Fonseca and Guedes Soares (2002).
As the ship motions are mainly induced by ocean
waves, the simulation of the sea state must be also
realistic from the physical point of view. Currently,
interactive simulations of ocean waves for Virtual
Environments apply the concept of random seas
based on wave spectra. This method allows creating
a statistically valid irregular sea surface with very
good visual appearance that may run at interactive
frame rates with modern CPUs.
Random seas are composed by a large set of
wave trains whose properties, namely the amplitude,
frequency and direction of propagation, are taken
from the discretization of a directional wave
spectrum. Wave spectra are estimated from
measurements of the surface elevation on ocean. The
signal in time domain is converted to frequency
domain by applying the Discrete Fourier Transforms
(DFT). Therefore, in order to convert back the
signals to time domain, Inverse Discrete Fourier
Transforms (IDFT) are applied to the wave trains
defined by the spectrum.
In random seas simulations, each wave train
obtained from the spectrum discretization, imposes a
small deformation into the sea surface. The final
deformation is given by the sum of all the
components. The main drawback of this procedure is
that for every vertex of the surface the elevation of
the sea must be evaluated by the sum of the
deformations imposed by of all the wave trains at
that vertex. As the number of waves must be quite
large in order to achieve a statistically valid and
visually realistic simulation, the calculation easily
becomes unsuitable for interactive simulations. The
solution adopted currently is to use the IDFFT
algorithm, which is an optimized form of the IDFT
to compute the sum of all the deformations on every
vertices of the sea surface. This solution imposes
some restrictions to the spectrum discretization and
to the distribution of the surface vertices in space. It
is out of the scope of this work to go deeply on this
issue, however, the relevant aspects that result from
use of the IDFFT algorithm to generate and simulate
the sea surface are the following:
The sea surface is a regular grid with NxM
vertices (normally with N=M), where N and M
are power of 2.
Wave vectors represented by the sea surface
depend of the location of each vertex of the
grid. Since the central vertex of the grid is
located at
(
)
0,0
=
x
G
, there are wave trains
propagating in all the directions with different
lengths. The wave number is given by the
length of the wave vector and therefore there
are also wave trains with different lengths.
Consequently, by the relation of dispersion,
wave trains also have different frequencies.
From the previous point, the maximum
number of represented wave trains is equal to
NxM‐1. The only wave that cannot be
represented is the one derived from the central
vertex because its wave number is equal to
zero.
Although all the waves defined by the grid
vertices may be represented, in most of the
cases there is a large number in which the
amplitude derived from the spectrum
discretization is equal to zero.
Goda (2000) provides the general theory of wave
mechanics for simulating random seas while
Tessendorf (2001), Belyalev (2003) and Fréchot
(2007) are good references focused on the
generation and simulation of random seas at
interactive frame rates.
3 COMPUTATION OF THE SHIP
MOTIONS
3.1 The RAO Operator
The computation of the ship motions in time domain
is intrinsically related with the wave trains
represented by the ocean grid in the sense that each
wave train generates six components of the ship
motion given by equation 1. The relation between
the properties of each function is obtained by the
RAOs of the ship.
Let h
i
(a
h
,ω
h
,φ
h
,t) be the function describing the
surface elevation at time instant t due to the wave
train i, and m(t) the value of the generated ship
motion function also at instant time t. Each
component j of the ship motion m(t) is given by:
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM SEAS BASED ON REAL WAVE SPECTRA
237
(
)
()
[]
tahRAOtm
hhhijj
,,,
ϕ
ω
=
(2)
where the operator RAO
j
specifies the relation
between the values of the amplitudes, a
h
,
frequencies, ω
h
, and initial phases, φ
h
of the wave
train function and the homologous values of the
component
j
of the generated ship motion.
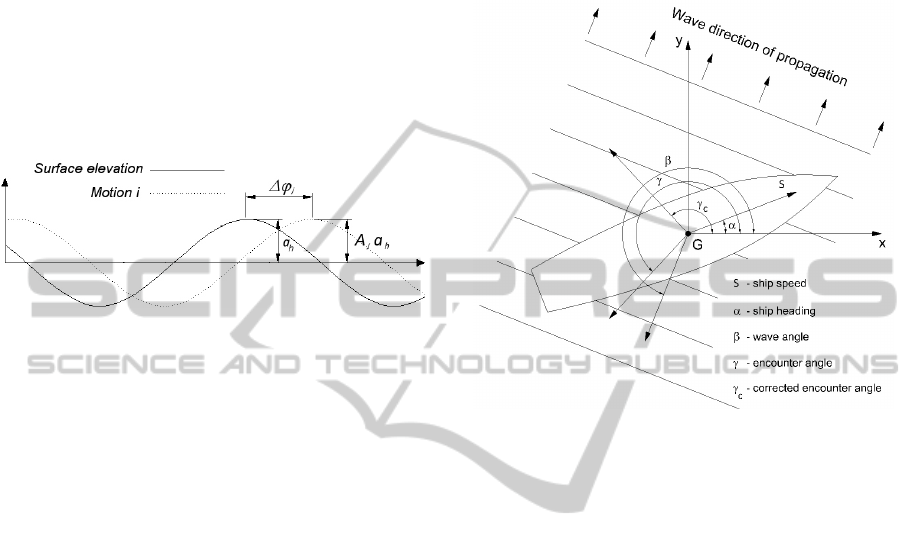
In linear theory, the ship motion generated by
each wave train is also described by a sinusoidal
function with the same frequency but with different
amplitude and phase as shown in figure 2.
Figure 2: Relation between the ship motion component
and the surface elevation for a single sinusoidal wave in
linear theory.
The frequency of the ship motion is the same as
the frequency of the wave train, so equation 2 can
then be written in its sinusoidal form:
()
(
)
jhhhjj
taAtm
ϕ
ϕ
ω
Δ++= sin
(3)
where A
j
and Δφ
j
are the pre-calculated values
specified by RAO
j
for different ship speeds and
angles, and for different frequencies of the wave
trains.
For a specific ship heading, the encounter angle
used to find the correct RAO
j
must take into
consideration the direction of propagation of the
wave train as presented in figure 3, Guedes Soares
(1995).
The encounter angle is given by:
α
β
γ
−=
(4)
where α is the ship heading and β the wave angle.
Due to the longitudinal symmetry of the hull of
almost all the existent vessels, encounter angles
specified in the RAOs are only applied to portside
and therefore they are defined in the interval [0,π].
On the other hand, wave angles and ship headings
are defined in the interval [0,2π] and therefore if the
encounter angle lies between π and 2π, which is the
example case of figure 3, it must be corrected by the
expression:
(
)
π
γ
γ
γ
−
−
=
2
c
(5)
Having the current ship speed and the corrected
encounter angle, the values of A
j
and Δφ
j
can be
easily derived from the RAOs tables.
Figure 3: The encounter angle is given by the difference
between the wave angle and the ship heading.
3.2 Interpolations between RAO
Values
As mentioned, RAO values are specified for specific
vessel speeds, encounter angles and wave
frequencies. However, in a generic simulation, the
manoeuvrability conditions of the ship (speed and
heading) or the sea state do not necessarily (and
most of the time they do not) coincide with the
specified RAO values. For such cases, interpolations
must be performed in order to find the correct RAO
values for the current ship and sea states.
Figure 4 represents schematically the data
contained in the RAOs tables from which the
simulation reads the values for the motion
amplitudes and phases depending of the current
status of the ship and the sea state.
When the manoeuvrability values are between
the specified ones, linear interpolations are
performed to get the real amplitudes and phase
angles. In order to compute by interpolation the final
values of Aj and Δφj for each motion mj, the
following arrays are stored in memory:
The speed table, s_Tb, contains N lines and
two columns. Each line corresponds to a ship
speed computed in pre-calculations. The first
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
238
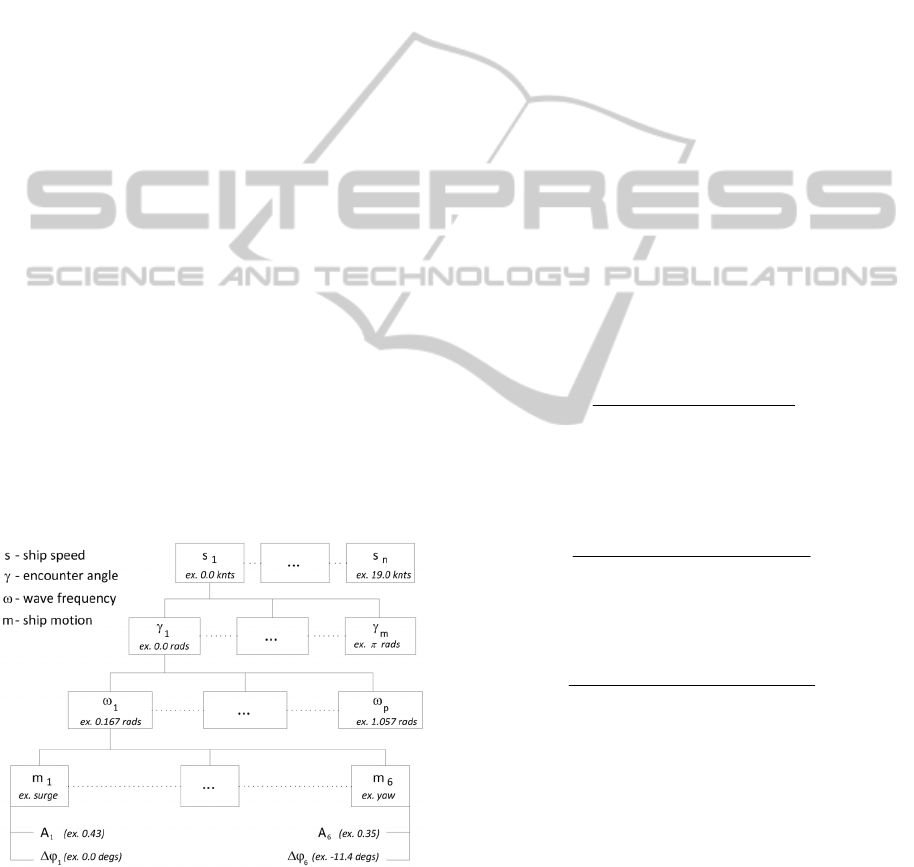
column is filled with the speeds in which
s_Tb[0,0]=0.0 and s_Tb[N,0] is the maximum
speed of the ship. The second column is
associated to an encounter angle table for each
ship speed.
The encounter angle table, γ_Tb, contains M
lines and two columns. Each line corresponds
to the encounter angles computed in pre-
calculations. The first column is filled with the
encounter angles in which γ_Tb[0,0]=0.0˚ and
γ_Tb[M,0]=180.0˚. The second column is
associated to a wave frequencies table for each
encounter frequency.
The wave frequencies table, ω_Tb, contains P
lines and two columns. Each line corresponds
to the frequencies computed in pre-
calculations. The first column is filled with the
frequencies in which ω_Tb[0,0] is the
minimum wave frequency and ω_Tb[P,0] is
the maximum wave frequency computed. The
second column is associated to the motions
table for each frequency.
Finally the motions table, m_Tb contains 6
lines and 2 columns. Each line corresponds to
one of the six components of the motion. The
first column stores the amplitude ratio, Aj, and
the second column the phase difference, Δφj,
values for the motion.
Let s and γ be the ship’s speed and encounter
angle respectively at time t, in a wave train of
Figure 4: RAOs values are read from ASCII files and
stored in hierarchical tables.
frequency ω. The values of speeds, encounter angles
and frequencies specified in the RAOs tables that
will be of interest to perform the necessary
interpolations to compute the final parameters A and
Δφ of the ship motion component are:
[
]
1,0,0,_ =
+
=
iinTbss
i
(6)
where, n is the index corresponding to the speed
immediately below s in the speed table.
[
]
1,0;1,0,0,_ ==
+
=
jijmTb
iij
γ
γ
(7)
where,
m is the index corresponding to the encounter
angle immediately below
γ in the encounter angle
tables and γ
_Tb
i
=S_Tb[n+i,1].
[
]
1,0;1,0;1,0,0,_ ==
=
+
=
kjikpTb
ijijk
ω
ω
(8)
where,
p is the index corresponding to the wave
frequency immediately below
ω in the wave
frequency tables and
ω_Tb
ij
=γ_Tb
i
[m+j,1].
Three factors,
s_fact, γ_fact and ω_fact are
computed to interpolate between ship speeds,
encounter angles and wave frequencies respectively.
The speed factor
s_factЄ[0,1] is computed by
the expression:
[]
[] []
0,_0,1_
0,_
_
nTbsnTbs
nTbss
facts
−+
−
=
(9)
The heading factor
γ_factЄ[0,π] is computed
by:
[]
[] []
0,_0,1_
0,_
_
00
0
mTbmTb
mTb
fact
γλ
γ
γ
γ
−+
−
=
(10)
The frequency factor
ω_factЄ[ω
min
,ω
max
] is
computed by:
[]
[] []
0,_0,1_
0,_
_
0000
00
pTbpTb
pTb
fact
ωω
ω
ω
ω
−+
−
=
(11)
Finally, being m the value of A or Δφ specified
in the motions table for a specific component the
ship motion,
m is calculated by the following
expression:
(
)
010
_ mmfactsmm −
+
=
(12)
where the following equations apply:
(
)
010
_
iiii
mmfactmm −
+
=
γ
(13)
(
)
010
_
ijijijij
mmfactmm −
+
=
ω
(14)
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM SEAS BASED ON REAL WAVE SPECTRA
239
[]
2,1r,,_ =+= rkpTbm
ijijk
ω
(15)
For
r=1 (second column) the corresponding A
value is computed while for
r=2 (third column) the
value of
Δφ is calculated.
As a simplification, the centre of rotation of the
ship is the centre of buoyancy and remains
unchangeable during the simulation.
3.3 The FFT Algorithm
After computing the values of A and Δφ for all the
ship motions, evaluating at interactive frame rates
the six components of the final ship motion at instant
time
t as the sum of all the motions generated by all
the wave trains is only possible using the IDFFT
algorithm. As an example for an ocean grid with
128x128 vertices and therefore 16383 wave trains
(applying the random sea model mentioned in
section 2), a total of
6x16383=98304 ship motions
may have to be evaluated every frame. Taking into
consideration that each ship motion is described by a
circular sinusoidal function, this sum can rapidly
lead to unacceptable frame rates.
The IDFFT algorithm provides an efficient way
to compute the following sum:
∑∑
==
⎟
⎠
⎞
⎜
⎝
⎛
+
=
N
n
M
m
M
mq
N
np
i
mnqp
eFf
11
2
,,
π
(16)
where
F
n,m
is a set of complex numbers uniformly
distributed and
p
∈
{1,…,N} and q
∈
{1,…,M}.
From the application of the IDFFT algorithm to
the random sea model, the elevation of the water
surface as the sum of the elevations generated by all
the wave trains at a grid point
g
p,q
=(p‐N/2,q‐M/2), is
given by:
(
)
()
()
()
∑∑
−
=
−
=
+
+
+
−
=
1
0
1
0
2
,
Re12
,
N
n
N
m
mqnp
N
i
ti
h
qp
qp
eea
tgh
hh
π
ϕω
(17)
where
a
h
and φ
h
are also evaluated for the wave train
corresponding to the grid point
g
p,q
.
If the position of the ship is added to equation 3,
each ship motion is described in complex notation
by the following expression:
(
)
()
ishh
ti
hii
eaAtm
ϕϕϕω
Δ+++
=
(18)
where
φ
s
is the phase term which depends of the
ship position in the grid.
Therefore, from equation 17 and 18, the ship
motion at the grid point
x
p,q
=(p‐N/2,q‐M/2), is given
by:
(
)
()
()
()
∑∑
−
=
−
=
+
Δ+++
+
−
=
1
0
1
0
2
,
Re12
,
N
n
N
m
mqnp
N
i
ti
hi
qp
qpi
eeaA
tgm
ishh
π
ϕϕϕω
(19)
Equation 19 has the form of equation 16 and
therefore the IDFFT algorithm can be used to
compute the sum of the ship motions at each grid
vertex. In equation 19 the parameters A
i
and Δφ
i
are
computed from equation 12;
a
h
, ω
h
and φ
h
are taken
from the wave trains.
The value of
φ
s
depends of the ship position and
is given by:
(
)
shhs
xkk
G
G
⋅=
ϕ
(20)
where
k
h
is the wave number of the wave train, ||
k
G
h
||
is the normalized direction of propagation vector of
the wave train and
x
G
s
is the ship position in the grid.
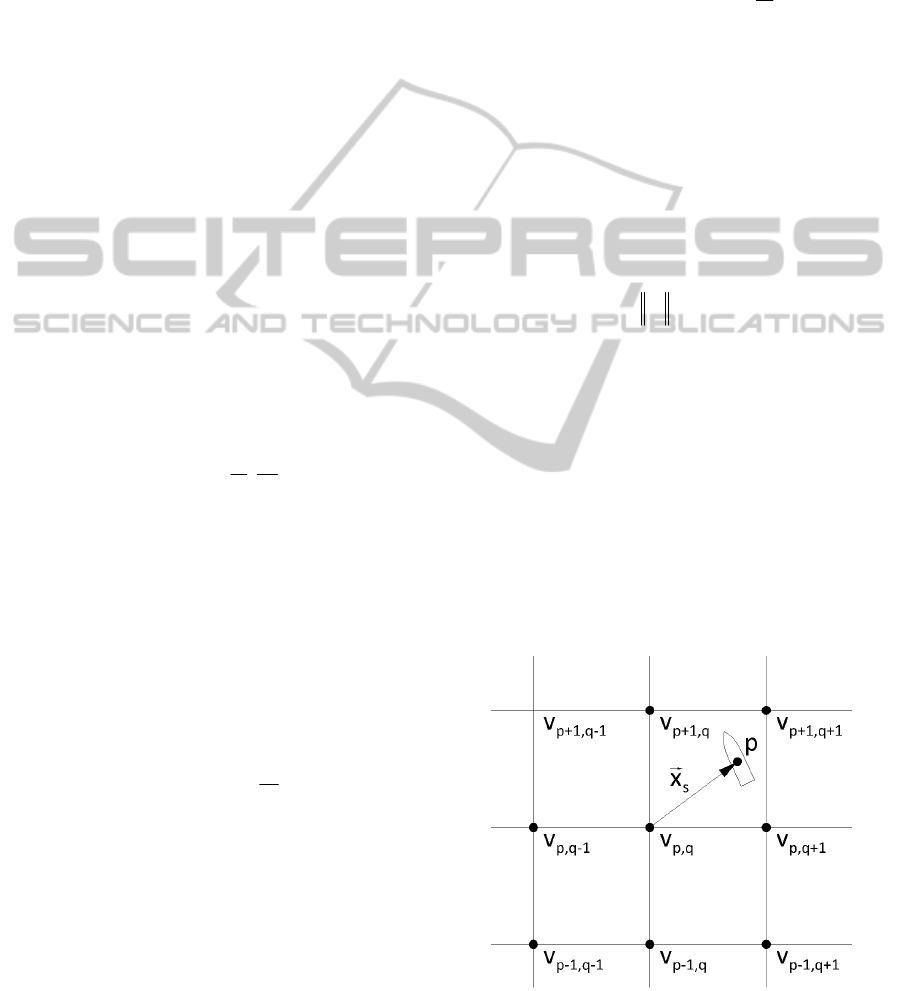
3.4 The Ship Position in the Grid
The term φ
s
appears because the ship most probably
will not be positioned on the grid vertices which are
the locations where the motions are computed.
Therefore an additional phase term must be added. It
depends of the ship position in the grid,
x
G
s
, namely
the position relatively to the vertex where the ship
motion is computed.
Figure 5: The ship position in the grid
x
G
s
is required to
compute the phase term φ
s
of the ship motion.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
240
If the ship is in the position
p, as shown in figure
5, then the ship motions are evaluated at vertex
v
p,q
and the vector
x
G
s
is used to compute the phase term
φ
s
.
4 IMPLEMENTATION
A prototype system was developed to test the
method described. The system generates a virtual
random sea based on the parametrical wave
spectrum of JONSWAP type. The user selects the
size and the resolution of the ocean grid and then
applies the spectrum to the grid generating a virtual
ocean. The characteristics of the spectrum are also
defined by the user, namely the wind speed, fetch
and main direction of propagation. The first two
parameters allow generating calm or rough seas with
more or less predominance of swell waves.
After the ocean is created, the system loads a
ship with a geometric definition and an associated
physical behaviour described in ASCII files. The
RAO arrays are created from the data contained in
the files.
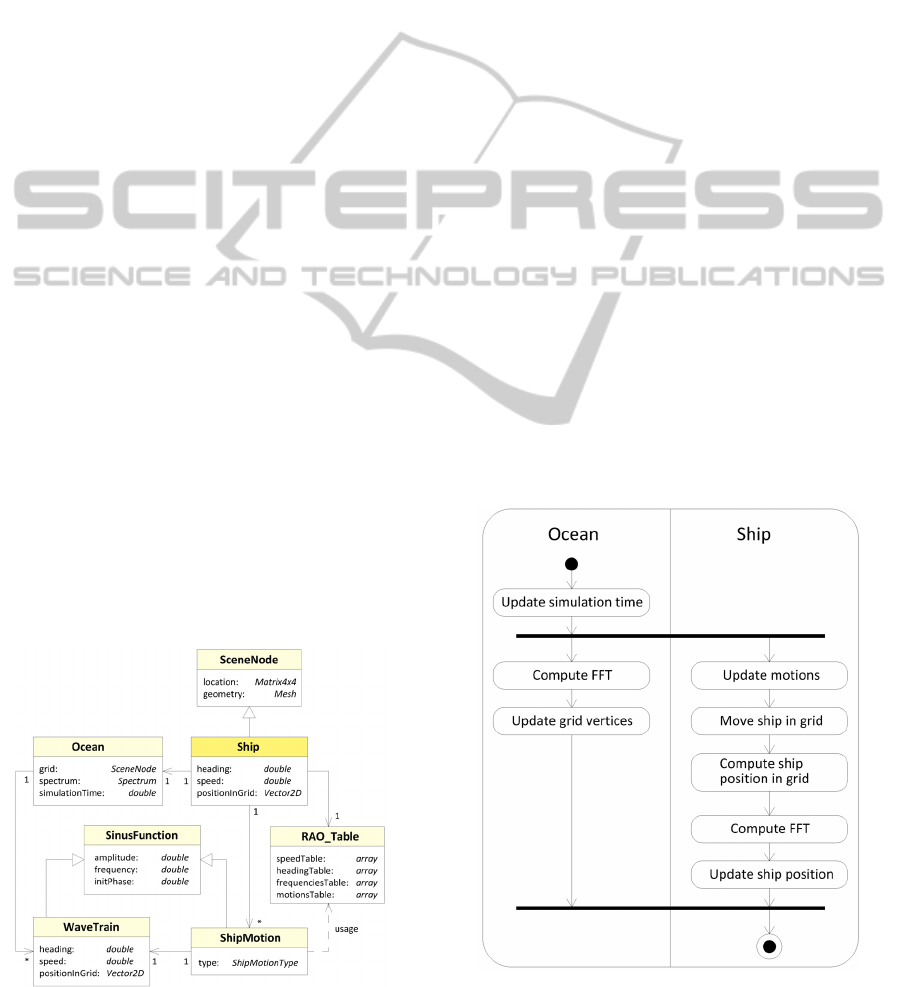
Figure 6 presents the UML class diagram of the
ship.
The class Ship is a SceneNode with a
geometrical representation located and oriented in
the tri-dimensional space. It points to a number of
ship motions equal to the number of wave trains in
the virtual ocean. Each ship motion has a pointer to
its corresponding wave train and uses the
information stored in the RAO tables, combined
with the properties of the wave train, to compute its
amplitude, frequency and initial phase. This last
depends of the phase difference specified in the
RAO tables and of the position of the ship in the
grid.
Figure 6: UML Class Diagram of the Ship.
As can be seen, the simulation uses only one
time, which is stored by the ocean object. All the
other objects use this simulation time to perform the
calculations.
Figure 7 presents the UML Activity Diagram for
a single frame.
The first task that must be performed before any
other operation take place, is the update of the
simulation time because its value is used on both the
ocean and ship operations. After that, activities
performed in the ocean and in the ship may run in
parallel because they are independent.
The updated time allows the ocean to calculate
for every wave train the elevation on each vertex of
the grid. Then the FFT algorithm is used to compute
the sum of all the elevations of every point of the
grid and finally all the vertices are updated to new
positions. Update the ship motions consists in
performing the interpolations in the RAOs tables in
order to compute the amplitude and phase difference
for all the ship motions. Then, the ship is moved
horizontally to its new position according to its
speed and heading. The new location allows
computing the ship position in the grid, which is
necessary to calculate the value of
φ
s
in equation 20.
With all the ship motions’ parameters calculated, the
FFT algorithm is then applied to compute the sum of
all the ship motions in the point where the ship
stands. Finally the position and orientation of the
ship are again updated to the final status.
The system was developed on the top of the
OGRE3D (Object-oriented Graphics Rendering
Figure 7: UML Activity Diagram for a single frame.
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM SEAS BASED ON REAL WAVE SPECTRA
241
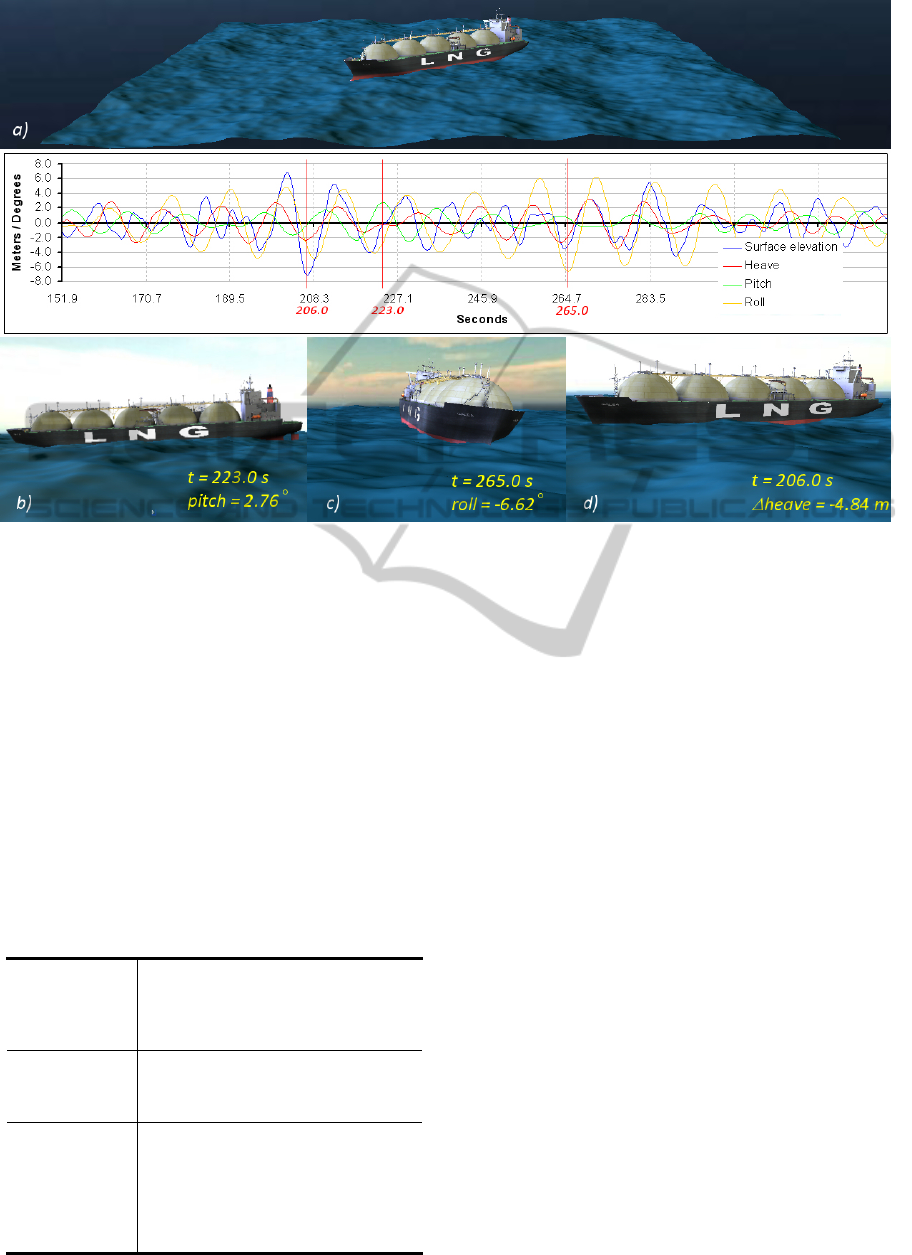
Figure 8: Results of the simulation with the parameters and characteristics presented in table 1.
Engine - http://www.ogre3d.org/) and the FFT
calculations were performed using the FFTW library
(Fastest Fourier Transform in the West -
http://www.fftw.org/).
5 RESULTS
Simulation tests were conducted in a Pentium(R)
Dual Core CPU E5200 @ 2.50GHz (2 CPUs) with
3070MB RAM. The graphics card was a NVIDIA
GeForce 9600 GT with 1024.0 MB RAM.
Figure 8 presents screen captures of a simulation
with the characteristics specified in table 1.
Table 1: Simulation parameters.
Seastate
Beaufortwindscale……….....9
Significantwaveheight.…...9.0m
Fetch………………...……….…367.6km
Peakfrequency……..….………0.5rad/s
Oceangrid
Resolution…………………………256x256
Sidelength……………….….......637.5m
Nºofwaves(a>0.0m)..……..18829
Ship
Type…………………………………..LNG
Lengthoverall…………………….290.0m
Breadth……………………………..…46.0m
Depth…………………..................25.5m
Draught…………………….…………11.4m
Speed………………....................19.8kn
For the simulation presented in figure 8, waves
are mainly coming from portside and stern. In figure
8a) it can be seen the irregular appearance of the sea
surface due to the high number of represented
waves. The graph of figure 8 represents the sea
surface elevation and the three most visible motion
components of the ship along time. Three screen
captures are presented in different instants of the
simulation in which one of the motion components
reach high values. In figure 8b) the ship is trimmed
with the stern raised and part of the rudder out of the
water. Figure 8c) emphases the roll motion to
portside and finally figure 8d) shows the difference
between the heave and the surface elevation at
amidships.
From the performance point of view, a frame
rate of approximately 9 fps was achieved in the
simulation of table 1. It is still below the necessary
frame rate required for interactive applications.
However, if the resolution of the ocean grid to is
reduced to
128x128, the frame rate increases to 26
fps which is already an acceptable value. Therefore
and as expected, the grid resolution is a determinant
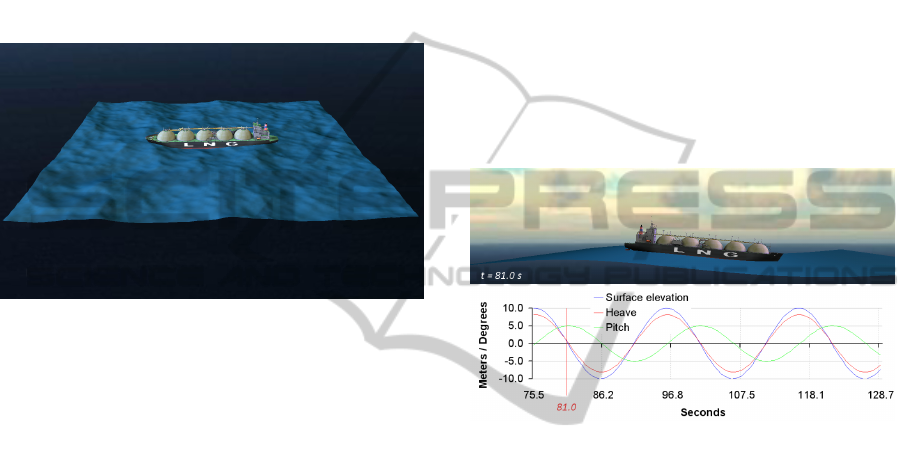
factor for the performance of the simulation. Figure
9 presents a screen capture of the same sea state but
with an ocean resolution of
128x128 with the same
side length.
Although it is clear that the grid resolution of
256x256 presents more realistic results of the ocean,
because the number of waves is significantly higher,
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
242
the
128x128 grid does not stay far behind.
However, it is expectable that interactive frame
rates can be achieved with
256x256 grid resolutions
using a more powerful CPU already available at
affordable prices.
All the calculations were preformed on the CPU.
However, studies like Moreland and Angel (2003)
allow computing the FFT on the GPU. As the sea
surface height field and the ship motions numerical
simulations are heavily based on the FFT, it is
expected that the frame rate increases substantially if
these calculations are performed on the GPU.
Figure 9: Ocean appearance for a simulation with a
128x128 grid resolution.
6 VA L I D AT I O N
When the virtual sea state is composed by thousands
of wave trains with different amplitudes, frequencies
and directions of propagation, it is impossible to
verify if the ship motions are absolutely coherent
with the surface deformation.
Therefore some features were added to the
system to artificially change the sea state and
consequently the ship motions, but maintaining the
same method of computation.
The first feature was to reset to 0.0 all the
amplitudes of the wave trains with the exception of
one whose frequency and direction of propagation
was (obviously) known. Then a feature to assign
specific amplitude to this wave train was added. By
doing this, the ship motions are computed using the
method described for all the wave trains, but only
one wave actually generates the ship motions. In
such situation it was possible to verify if the ship
motion was coherent with the deformation of the
surface. The possibility of only representing
specified components of the ship motion (surge,
heave, roll, etc.) was also added. Therefore the
results of each separated component when subjected
to a single wave train were analysed.
Using these features, several tests were
performed with different wave trains, for specific
components of the ship motion and for different
speeds and encounter angles.
Although it is difficult to represent the validation
tests (which are mainly based on animations) in the
paper, we present screen captures and ship motions
graphs in figures 10 and 11 for some of the
simulations performed.
The wave train used for validation purposes had
the lowest frequency of all the waves represented by
the ocean grid. An amplitude of 10.0 meters was
artificially assigned in order to increase and observe
the ship motions clearly. For lower frequency wave
trains, heave motions are almost synchronized with
the surface elevation at amidships. This can be
verified by the graph presented in figure 10.
Figure 10: Ship subjected to a single wave train coming
from steam with an amplitude of 10.0 m, frequency equal
to 0.310 rad/s and wavelength of 640 m.
The pitch motion has a phase difference of nearly
90˚, which also validates
the results. In fact when the
surface elevation is minimum (at the wave though),
for instance at t≈86s, the pitch angle is around 0.0˚.
This is the moment when the surface elevation is
nearly the same at the stem and at the stern and that
is why there is no pitch angle. When the surface
elevation increases at amidships, the difference
between elevations at the stem and stern also
increases the pitch angle decreases leading the stem
to rise (see figure 1). The minimum value of pitch
occurs when the elevation is nearly zero at
amidships, which is when the ship is half way
between the though and the crest of the wave.
With low frequency wave trains coming from
starboard, the sway and roll motions present similar
behaviour to the pitch motion as shown in figure 11.
As expected, both graphs in figures 10 and 11
have the same configuration of the graph presented
in figure 2 in which the frequency of the motions
and the surface elevation is the same, and there is a
phase difference given by the RAOs of the ship.
INTERACTIVE SIMULATION OF SHIP MOTIONS IN RANDOM SEAS BASED ON REAL WAVE SPECTRA
243

Figure 11: Ship subjected to a single wave train coming
from starboard with amplitude of 10.0 m, frequency equal
to 0.310 rad/s and wavelength of 640 m.
7 CONCLUSIONS
A method to simulate the ship motions in the six
degrees of freedom at interactive frame rates in an
irregular sea state based on a real wave spectrum
was presented. In order to achieve interactive
performance, the IDFFT algorithm must be used to
compute the sum of all the ship motions generated
by the wave trains. Even so, the maximum
resolution allowed with the hardware available today
is 256x256 if the calculations are performed in the
CPU. The ship motions obtained with this method
are visually coherent with the irregular sea state
simulated; however, it was necessary to validate the
results by applying the method for situations in
which the ship is subjected to a single wave train of
low frequency.
This method can be applied in simulation tools
that require visual a physical realism of the sea and
the ship motions at interactive frame rates such as
ship simulators.
REFERENCES
Bhattacharyya, R. 1978. “Dynamics of Marine Vehicles”,
John Wiley & Sons Inc.
Belyalev, V. 2003. “Real-time simulation of water
surface”, In: GraphiCon-2003, Conference
Proceedings, pages 131–138. MAX Press.
Daqaq, M. 2003. “Virtual Reality Simulation of Ships and
Ship-Mounted Cranes”, MSc Thesis. Faculty of the
Virginia Polytechnic Institute and state University.
Blacksburg, Virginia.
Fonseca, N., and Guedes Soares, C., 1998. “Time-Domain
Analysis of Large-Amplitude Vertical Motions and
Wave Loads”, Journal of Ship Research, Vol. 42, Nº
2, pp. 100-113.
Fonseca, N. and Guedes Soares, C., 2002. “Comparison of
Numerical and Experimental Results of Non-Linear
Wave Induced Vertical Ship Motions and Loads”,
Journal of Marine Science and Technology, vol. 6, pp.
193-204.
Fréchot, J., 2007. “Realistic Simulation of Ocean Surface
Using Wave Spectra”, Journal of Virtual Reality and
broadcasting, vol. 4, nº 11.
Goda, Y., 2000. “Random Seas and design of maritime
structures”, Advanced Series on Ocean Engineering,
World Scientific, vol. 15, ch. 2.
Guedes Soares, C., 1995. “Effect of Wave Directionality
on Long-Term Wave Induced Load Effects in Ship.”
Journal of Ship Research, vol. 39 nº 2, pp. 150-159.
Lewis, E.V. (Ed.). 1988. “Principles of Naval Architecture
Vol. III: Motions in Waves and Controllability” 3
rd
ed.
Society of Naval Architects and Marine Engineers,
New York.
Moreland, K. and Angel, E., 2003. “The FFT on a GPU”,
HWWS'03 Proceedings of the ACM
SIGGRAPH/EUROGRAPHICS conference on
Graphics Hardware, 26-27 July, San Diego, CA,
USA, pp. 112-119.
Salvesen, N., Tuck, O.E. and Faltinsen, O., 1970. “Ship
motions and sea loads”, Transactions, Society of Naval
Architects and Marine Engineers, no. 78, pp. 250-
287.
Sutulo, S.; Moreira, L., and Guedes Soares, C., 2002.
“Mathematical Models for Ship Path Prediction in
Manoeuvring Simulation Systems”, Ocean
Engineering, vol. 29, nº 1, pp. 1-19.
Sutulo, S.; Rodrigues, J. M., and Guedes Soares, C., 2010.
“Hydrodynamic Characteristics of Ship Sections in
Shallow Water with Complex Bottom Geometry”,
Ocean Engineering. vol. 37, pp. 947-958.
Tessendorf, Jerry, 2001, “Simulating Ocean Water”,
SIGGRAPH 2001, course notes.
Ueng, Shyh-Kuang; Lin, David and Liu, Chieh-Hong,
2008, “A ship motion simulation system”, Virtual
Reality, vol. 12, pp. 65-76.
Xiufeng, Zhang; Yicheng, Jin; Yong, Yin and Zhihua, Li.
2004. “Ship Simulation Using Virtual Reality
Technique.”, Proceedings of GRAPHITE 2004. 15-18
June, Singapore.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
244
