
CAMERA LOCALIZATION
USING INCOMPLETE CHESSBOARD PATTERN
Marek Solony, Pavel Zak, Vitezslav Beran and Michal Spanel
Faculty of Information Technology, Brno University of Technology, Bozetechova 2, 612 66 Brno, Czech Republic
Keywords:
Chessboard pattern, Camera localization, Kalman filter, Tracking, Real-time processing.
Abstract:
This paper introduces the approach for the real-time camera localization by capturing the plane of chessboard
pattern. This task has been already solved by several different approaches, but we present the novel method of
the chessboard reconstruction from its incomplete image, that enables successful camera localization even if
the captured chessboard plane is partially covered by an unknown object. The camera position and orientation
is during the processing of the videosequence tracked with the Kalman filter that enables correct localization
also in the closeup views on the pattern.
1 INTRODUCTION
The process of automatic camera localization is
a non-trivial task. Usually some auxiliary marks or
patterns featuring easy detectability are used in the
scene to enable the successful localization process.
One of the most common pattern is the chessboard
plane due to its geometric simplicity and good con-
trast visibility.
In this paper we propose the novel approach for
the camera localization using the incomplete chess-
board pattern. This means that there is no need to cap-
ture the whole chessboard plane to reach the proper
localization. The algorithm was designed to deal with
the situation when an unknown object or obstacle is
occluding the chessboard pattern.
2 RELATED WORK
Over the past years numerous different aproaches for
the camera localization and auxiliary marks defini-
tion have been presented. These works include the
description of the marks in the form of the plain
squares (Kato and Billinghurst, 1999), labelled self-
identifying squares (Fiala and Shu, 2008), circular el-
ements ((Ahn et al., 2001), (Forbes et al., 2002)) and
others.
Camera localization using the chessboard pat-
tern have been examined in number of works that
include methods employing Delaunay triangulation
(Shu et al., 2003), characteristics of local intensity
and the grid line architecture of the pattern (Wang
et al., 2010) and mainly the symmetric characteristics
of chessboard corner areas - (Weixing et al., 2009),
(Bevilacqua et al., 2008) and (Ha, 2007).
Unlike other approaches, the method proposed in
(de la Escalera and Armingol, 2010) uses a chess-
board pattern when no information regarding the
number of rows or columns is supplied and the ap-
proach presented in (Bevilacqua et al., 2008) aims for
the ability to detect the chessboard from the incom-
plete set of the inner chessboard corners.
3 SYSTEM DESIGN
This section introduces our approach for the camera
localization using the incomplete chessboard pattern.
The scenario is that there is a planar pad with the
chessboard pattern that is observed by the moving
camera. In each frame of so obtained videosequence,
it is desired to retrieve the position and orientation of
the camera relative to the observed chessboard plane.
The chessboard plane can be partially covered by un-
known object so the crucial part of this process is the
chessboard area detection, reconstruction and follow-
up tracking.
The video processing begins with the initialization
phase, when the chessboard plane is detected and re-
constructed, and the initial camera position and orien-
tation is determined. After the initialization, the track-
415
Solony M., Zak P., Beran V. and Spanel M..
CAMERA LOCALIZATION USING INCOMPLETE CHESSBOARD PATTERN.
DOI: 10.5220/0003329004150418
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 415-418
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
ing phase continues with the frame-by-frame updat-
ing of the camera position and orientation, this time
with less restrictions on the view itself. This means
that during the tracking phase the camera can move
close to the chessboard plane and still the proper lo-
calization is possible.
4 THE ALGORITHM
4.1 Image Analysis
The main visual marker, inner corner of the chess-
board pattern, features strong gradient changes and
the neighbourhood that is according to the color (or
intensity) values separable into two distinct groups
arranged into four perspectively distorted rectangles.
This perspective distortion nevertheless does not cur-
vate the lines forming the borders between the chess-
board fields which is the key feature used in the pro-
cesing.
The detector is based on mentioned properties of
a corner neighbourhood and with slight implemen-
tation changes and enhancements originally comes
from the work (Bevilacqua et al., 2008).
The chessboard reconstruction algorithm (see
Section 4.2) takes as its input the set of chessboard
pattern line segments, which are the lines connecting
two adjacent corner points.
To check whether two corner points lie on the
same line segment, their join is iteratively divided in
halves. At every dividing point, the difference of two
side pixels intensities is evaluated. The side pixels
are found on the normal to the corner join in specified
distance. The difference of all side pixel intensities
should be in the case of proper line segment alongside
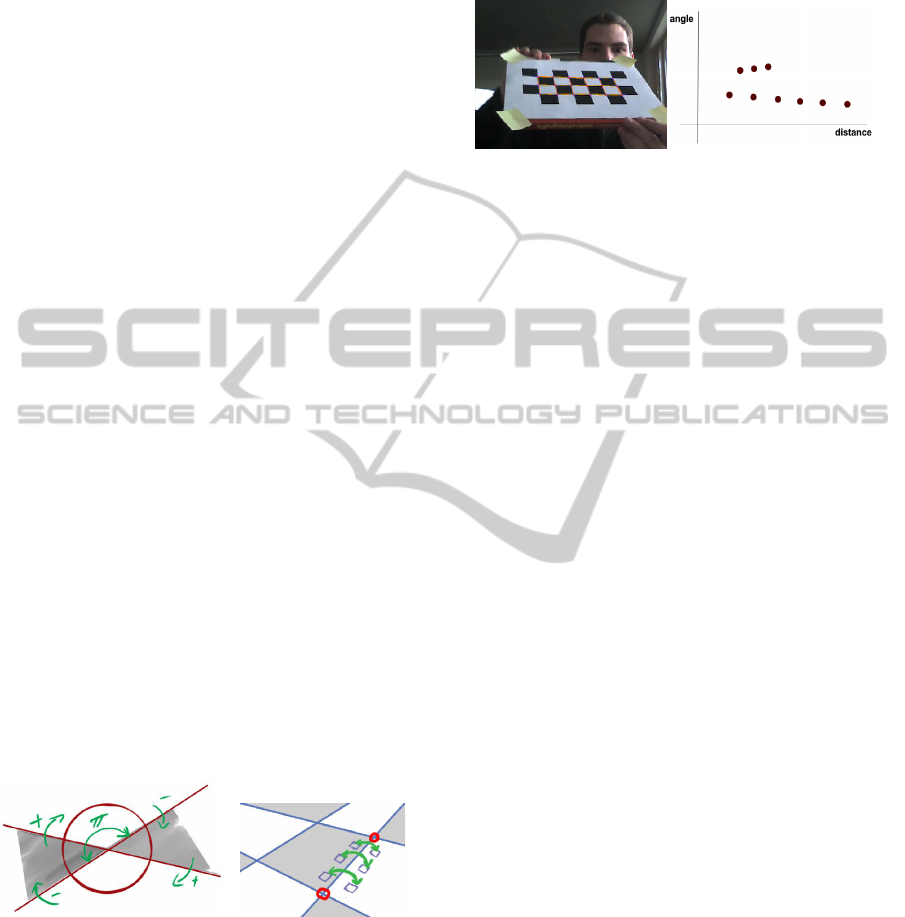
the joint merely the same, as can be seen on Figure 1.
Figure 1: Properties of chessboard corner neighbourhood
(left). Sampling of the line segment (right).
4.2 Chessboard Assembly
In order to compute the position and rotation of cam-
era, the known planar structure of calibration chess-
board and its image in camera’s projection plane can
be exploited. During the extraction, the mutual posi-
tions of the corners are not preserved, so the structure
of detected corners is unknown. We propose an al-
gorithm that focuses on finding the chessboard grid -
inner vertical and horizontal lines.
Figure 2: The detected line segments form points in Hough
space.
To extract lines of chessboard grid, we exploit the
fact that every two adjacent corners form a line that
passes through other corners of the same row/column.
If at least one such line from each row and column is
detected, the whole chessboard grid can be assembled
in three steps:
1. All detected line segments are transformed into
2D Hough space. This transformation maps a line
into a point such that the lines with same angle
and distance are mapped to the same point (Fig-
ure 2), thus defining the same row or column of
chessboard pattern.
2. The parallel lines lie in the Hough space on
the same line. The chessboard is composed of
two sets of parallel lines - horizontal and verti-
cal, so two sets of collinear points should be in
Hough space, which can be found using RANSAC
(Forsyth and Ponce, 2002) algorithm.
3. Points from each set are sorted, so numbered lists
of vertical and horizontal lines are created. These
lines intersect in points, where the chessboard cor-
ners should lie in image from camera, so the small
areas around intersections are searched for best
corner candidates.
Knowing the structure of chessboard corners, the 2D
to 3D correspondences can be easily found.
4.3 Camera Localization and Tracking
The localization of the camera is a process of finding
camera’s exact position and rotation in arbitrary world
coordinate frame. The real camera can be approx-
imated with pinhole camera model which describes
relationship between the coordinates of 3D point and
its image in camera’s projection plane.
The mapping between 3D scene points and their
images is defined by equation:
x = A[R| − T ]X (1)
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
416
where vector x represents the image coordinates of
3D point X, matrix A contains intrinsic camera pa-
rameters and joint matrix [R| − T ] represents external
camera parameters - rotation matrix R and translation
vector T , which relate the camera orientation and po-
sition to a world coordinate system.
With known intrinsic camera parameters, the po-
sition and rotation of camera can be estimated using
at least 4 coplanar 3D points and their corresponding
images in camera projection plane. Algorithm such as
Levenberg-Marquadt (Forsyth and Ponce, 2002) can
be used to minimize projection error, which is com-
puted as distance between corners extracted from im-
age, and their projections using estimates of unknown
parameters.
The initialization step is applied only once, next
the camera movement is tracked using Kalman filter
(Forsyth and Ponce, 2002), because it can cope with
unstable motion of hand-held camera.
Because any 4 non-collinear corners have to be
found to compute new camera positions, the cam-
era motion is not restricted by detecting whole chess-
board, so various angles and camera close-ups are
possible without losing track of camera position.
5 EXPERIMENTS AND RESULTS
The system has been tested on both real and synthetic
data. The test scenes have been captured in the reso-
lution of 640x480 pixels by several cameras featuring
different capture properties and also rendered by 3D
software.
5.1 Stability
The test data were captured to contain intrusive fac-
tors that can significantly worsen the image quality
and therefore affect the reliability of the proposed al-
gorithms. These factors include shaky or fast camera
movements, poor scene lighting (insufficient contrast,
strong shadows), image noise, complex background
or an object occluding the chessboard area.
The experiments with different kinds of occlu-
sions proved the ability of correct initialization also in
the cases, when there are false positive detections of
chessboard corners in the object or background area.
Fast or shaky camera movements lead to blurred
videosequences which causes losing of limited num-
ber of detected chessboard corners. Such failures
within short time (several successive frames at most)
are suppresed due to the usage of Kalman filter.
Very fast camera movements can lead to the unde-
tectable failure when the located chessboard is shifted
and placed on incorrect chessboard lines. This alias-
ing happens when the movement of the chessboard
image between adjacent frames is close or greater
than the size of the pattern squares.
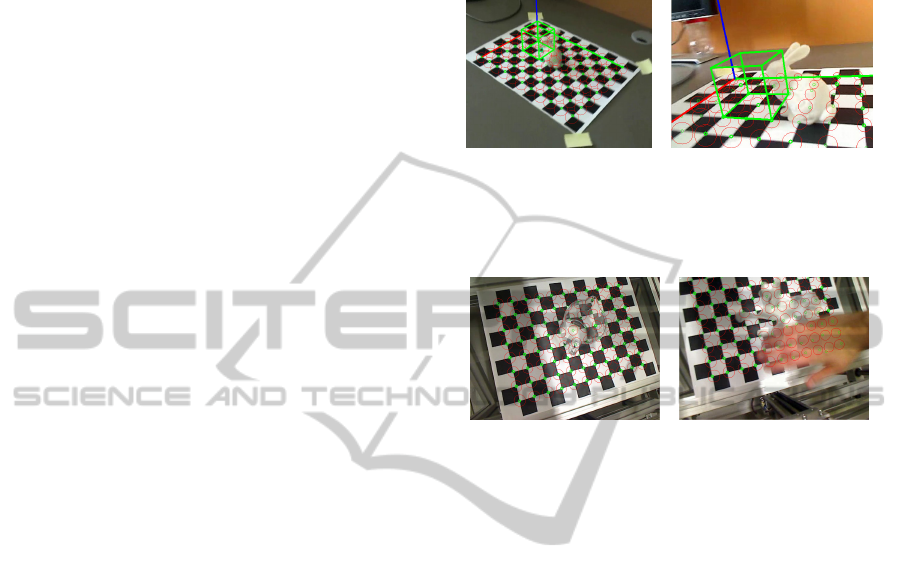
Figure 3: Examples of the chessboard detection in distant
and closeup view. The correctness of the localization is
demonstrated by drawn world coordinate axis and virtual
cube.
Figure 4: Examples of the chessboard detection during the
initialization (left) and tracking phase (right).
5.2 Accuracy
The evaluation of localization accuracy has been
based on synthetic data. In the case of a general cam-
era movement, the information about rotation of the
camera turned out to be more precise than the cam-
era position. The average deviation of the precise and
computed camera position was about the tenth of the
size of chessboard square side, the average deviation
in the rotational space did not exceeded 0.01 radians.
The accuracy of the output is directly affected by
the distance of the camera from the chessboard plane.
The smaller the distance is the more precise is the
computed camera position (see Figure 5). The relative
disparity, that is an average of the measured value di-
vided by the distance of the camera to the chessboard
plane, was smaller than 0.006.
5.3 Performance
The speed of the initialization part depends primarily
on the amount of the inner chessboard corners within
the pattern, the distance of the camera to the chess-
board plane, image resolution setting and background
complexity.
In the case of the chessboard pad with 11x8 inner
corners that was used during the tests, the process-
ing time of single initialization step did not exceeded
CAMERA LOCALIZATION USING INCOMPLETE CHESSBOARD PATTERN
417

Figure 5: The dependance of the computation accuracy to
the distance between camera and chessboard pad (1 unit
equals the size of the chessboard square side).
80ms. The average time of the processing during the
tracking phase was 16 miliseconds which corresponds
to more than 60 frames per second. This period in-
cludes all steps of frame processing, including the
querying for the frame image, camera prediction and
localization.
Processing times were measured on the notebook
having Core 2 Duo processor and 2 GB of RAM.
6 CONCLUSIONS
The approach for the automatic camera localization
and tracking using the chessboard pattern has been
presented. The described approach has been designed
to perform in real-time so it can be used in various
tasks such as augmented reality, user interfaces (the
camera or a small chessboard plane can be used as
a 6 DOF device), 3D scene reconstruction or in com-
bination with object scanner.
The chessboard reconstruction algorithm is rather
original and performs well with the occluded or in-
complete chessboard plane. Nevertheless, the pos-
sibilty of the line skip alias in the tracking phase is
the weak part of the process and could be improved
in future work. This skip is usually caused by quick
camera movements, so increasing the framerate of the
camera could reduce the risk of failure.
ACKNOWLEDGEMENTS
This work has been supported by Security-Oriented
Research in Informational Technology, Czech Min-
istry of Education, Youth and Sports, CEZMSMT
MSM0021630528, Recognition and presentation of
multimedia data, Faculty of Information Technology,
Brno University of Technology, Czech Republic, FIT-
S-10-2, EU project FP7-ARTEMIS R3-COP, grant
no. 100233 and the company 3Dim Laboratory Ltd.
REFERENCES
Ahn, S. J., Rauh, W., and Kim, S. I. (2001). Circular coded
target for automation of optical 3d-measurement and
camera calibration. IJPRAI, 15(6).
Bevilacqua, A., Gherardi, A., and Carozza, L. (2008). Au-
tomatic perspective camera calibration based on an in-
complete set of chessboard markers. In Sixth Indian
Conference on Computer Vision, Graphics Image Pro-
cessing.
de la Escalera, A. and Armingol, J. M. (2010). Automatic
chessboard detection for intrinsic and extrinsic camera
parameter calibration. Sensors, 10(3):2027–2044.
Fiala, M. and Shu, C. (2008). Self-identifying patterns for
plane-based camera calibration. Machine Vision Ap-
plications, 19(4).
Forbes, K., Voigt, A., and Bodika, N. (2002). An inex-
pensive, automatic and accurate camera calibration
method. In In Proceedings of the Thirteenth Annual
South African Workshop on Pattern Recognition.
Forsyth, D. A. and Ponce, J. (2002). Computer Vision:
A Modern Approach. Prentice Hall.
Ha, J.-E. (2007). Automatic detection of calibration mark-
ers on a chessboard. Optical Engineering, 46(10).
Kato, H. and Billinghurst, M. (1999). Marker tracking and
hmd calibration for a video-based augmented reality
conferencing system. In Proceedings of the 2nd IEEE
and ACM International Workshop on Augmented Re-
ality, Washington, USA. IEEE Computer Society.
Shu, C., Brunton, A., Fiala, M., Shu, C., Brunton, A., and
Fiala, M. (2003). Automatic grid finding in calibra-
tion patterns using delaunay triangulation. Technical
report.
Wang, Z., Wang, Z., and Wu, Y. (2010). Recognition of
corners of planar checkboard calibration pattern im-
age. In Control and Decision Conference (CCDC).
Weixing, Z., Changhua, M., Libing, X., and Xincheng, L.
(2009). A fast and accurate algorithm for chessboard
corner detection. In Image and Signal Processing,
2009. CISP ’09. 2nd International Congress on.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
418
